Изобретение относится к области авиации, космонавтики, мореплавания, пилотируемых и беспилотных летательных аппаратов и подводных судов, систем дистанционного наведения оружия на цель, в частности, средствам ручного электродистанционного управления летательными аппаратами.
Известны схема и принципы управления самолетом, когда применяется согласованные поперечное управление осуществляемое отклонением влево или вправо ручки управления (или вращением штурвального колеса), продольное управление - движением ручки (колеса) на (или от) себя и управление рулем направления (обеспечивающим путевое управление) - который отклоняется нажатием на соответствующую педаль (Управляемый полет на самолете [электронный ресурс] // Легенды мировой авиации. Режим доступа: http://avialegend.ru/samolet/Upravljaemyj-polet-na-samoljote.htm (дата обращения 01.08.2018)).
Способ, ставший классическим, лишь почти через столетие был модифицирован и реализован в виде джойстика благодаря созданию электродистанционных систем. Использование джойстика в качестве органа управления летательным аппаратом преследовало цель повышение комфортабельности рабочего места пилота. И, если на пассажирских самолетах, где в управлении задействованы два пилота и большая часть рейса совершается в автоматическом режиме на автопилоте, джойстик оказался допустимым органом управления, то на боевых скоростных, управляемых одним пилотом, и спортивных самолетах использование джойстика проблематично, поскольку исключает возможность использования бортовой панели летательного аппарата для монтажа вспомогательных органов управления и смены рук при пользовании бортовым оборудованием или для отдыха. Другим, редко упоминаемым недостатком классического способа, при котором управление креном и тангажом осуществляется ручкой управления, установленной вертикально между ног пилота или штурвалом с продольным ходом, а управление курсом посредством педалей, движение которых противоположно направлению поворота, является выработка точной и главное надежной координации движений рук и ног пилота для выполнения летательным аппаратом необходимых эволюций. Этим объясняется то, что уже в первые годы развития авиации при обучении летного контингента пришлось создавать и использовать тренажеры, для понимания и заучивания зависимости поведения летательного аппарата от движений органов управления.
Известен способ управления летательным аппаратом, который включает полет в воздухе летательного аппарата, снабженного системой управления в виде кинематически связанных между собой проводок управления, одну из которых выполняют в виде двух гибких передаточных элементов, а другую - в виде жесткого передаточного элемента с шарнирными сочленениями (патент RU №2461493, МПК В64С 31/028, В64С 39/00, В64С 13/30, В64С 19/00, опубл. 21.09.2010 г). Управляющее воздействие на жесткий передаточный элемент сочетают с одновременным управляющим воздействием на гибкие передаточные элементы.
Недостатком способа является то, что он также относится к условным способам управления, при которых необходимо понимание и запоминание связи между движением органов управления, отклонением рулей направления и поведением при этом самого летательного аппарата. Кроме этого, данный способ применим только к летательным аппаратам с мягким крылом, где рулевая поверхность образуется деформированием поверхности самого крыла и который с малой вероятностью может быть использован на тяжелых пассажирских и боевых самолетах.
Наиболее близким является способ управления летательным аппаратом, при котором управление направлением (курсом) и тангажом осуществляется отклонением расположенных на телескопическом рычаге управления рукоятки управления или штурвала целиком влево-вправо и вверх-вниз, а управление по крену осуществляется педалями, координированным поджатием и выпрямлением соответствующих ног или поворотом штурвала в угловом направлении (патент RU №2420427, МПК 64С 13/00, опубл. 20.09.2008 г). Телескопический рычаг управления расположен вертикально или горизонтально-поперек, или горизонтально-вдоль относительно оси самолета.
Недостатками способа является то, что при управлении креном выполняемом педалями при вертикальном положении ног, посадка пилота в кабине становится неустойчивой, а при наклонном или горизонтальном положении ног утрачивается сама идея рефлекторного управления, поскольку движение педалей в этом случае совершается в плоскости, перпендикулярной крену летательного аппарата. При управлении креном поворотом штурвала (рукоятки) в угловом направлении, кинематические центры поворота руки пилота и рукоятки расположены по разные стороны от плоскости перемещения штурвала (рукоятки), что определяет значительное кинематическое несоответствие, требующее непрерывной коррекции движениями пилота, и которое существенно снижает точность управления. Кроме этого, несмотря на весовую компенсацию, пилоту необходимо удерживать рукоятку управления или штурвал в вывешенном положении, что ведет к весьма скорому утомлению мышц плеча и предплечья пилота, и, следовательно, снижению точности и безопасности полета.
Задачей изобретения является разработка способа интуитивного управления летательным аппаратом, оснащенным электродистанционной системой, позволяющего сократить сроки обучения летного состава, обеспечить приобретение устойчивых навыков управления и тем самым повысить безопасность полетов.
Техническим результатом является ускорение процесса обучения пилотов, повышение точности, надежности управления и повышение безопасности полетов.
Технический результат достигается в способе интуитивного управления летательным аппаратом, заключающемся в управлении креном, тангажом и курсом посредством поворота по часовой стрелке или против и отклонения вверх-вниз, влево-вправо рукоятки управления, при этом все три оси вращения рукоятки управления проходят через геометрический центр лучезапястного сустава кисти руки пилота, а геометрическая ось рукоятки совпадает с продольной осью летательного аппарата.
Способ интуитивного управления летательным аппаратом характеризуется тем, что рукоятка управления расположена между ног пилота.
Сущность способа интуитивного управления летательным аппаратом заключается в том, что движение летательного аппарата в пространстве полностью соответствует отклонению и повороту рукоятки управления относительно ее нейтрального положения - единого органа управления креном, тангажом и курсом, и изменяется в соответствии с производимым пилотом изменением положения рукоятки. При этом геометрическая ось рукоятки управления в ее нейтральном положении совпадает с продольной осью летательного аппарата, а рукоятка управления ассоциируется с самим летательным аппаратом. Все изменения положения рукоятки управления, возникающие в результате интуитивного воздействия пилота на рукоятку с тремя вращательными степенями свободы, по всем трем осям вращения, проходящим через сустав кисти руки пилота, в точности «копируются» в изменении положения летательного аппарата.
Вращение рукоятки управления вокруг продольной оси (совпадает с продольной осью летательного аппарата), поперечной горизонтальной и поперечной вертикальной осей через электродистанционную систему и рули направления обеспечивает управление креном, тангажом и курсом летательного аппарата.
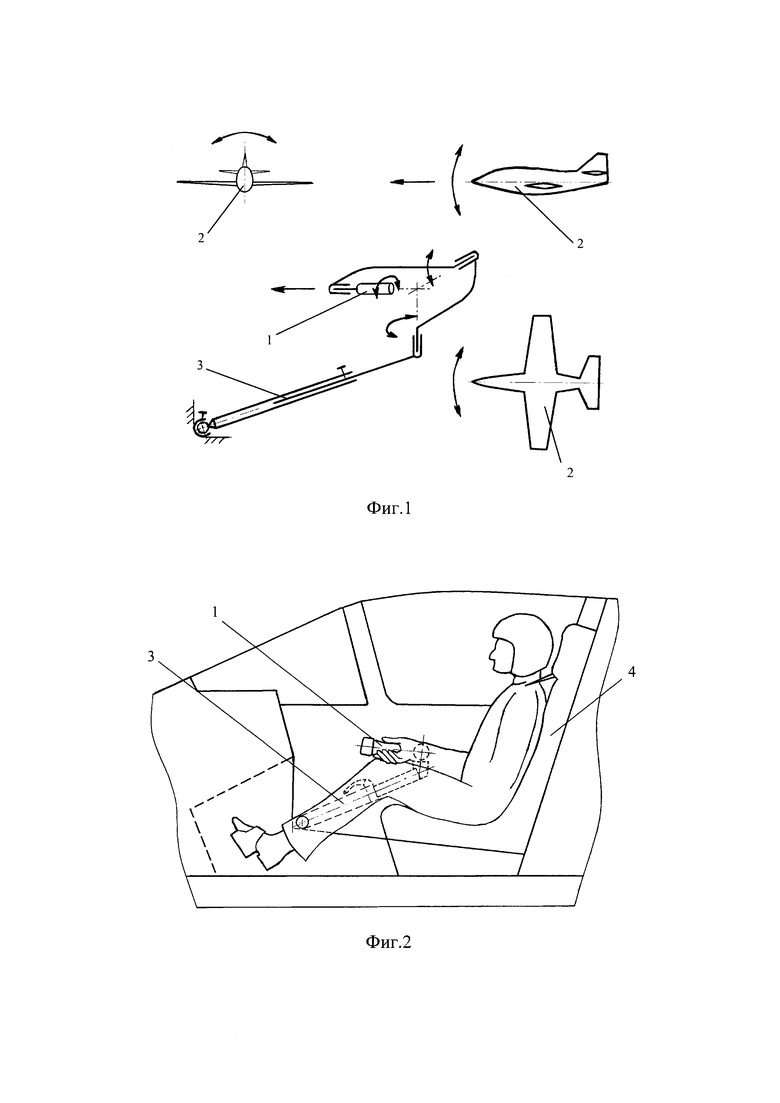
На фиг. 1 изображена кинематическая схема управления рукояткой положением летательного аппарата, на фиг. 2 расположение рукоятки управления в руке пилота.
Управление креном осуществляется за счет вращения рукоятки 1 вокруг собственной оси, управление тангажом - при повороте рукоятки управления 1 вокруг поперечной горизонтальной оси летательного аппарата 2, управление курсом - при повороте рукоятки 1 вокруг поперечной вертикальной оси летательного аппарата 2. Таким образом, направление движения рукоятки управления 1 синхронизировано в полете с перемещением в пространстве самого летательного аппарата 2. Рукоятка в руке пилота приобретает функцию курсонаводчика, который он интуитивно с желаемым креном поворачивает в необходимом направлении. При этом ноги пилота не участвуют в процессе пилотирования, и на них может быть возложена функция управления тягой или вектором тяги двигателей, вооружением или механизацией аэродинамических поверхностей.
Оси вращения рукоятки управления 1 пересекаются в кинематическом центре лучезапястного сустава руки пилота. Поскольку ось рукоятки 1 в ее нейтральном положении выполнена совпадающей с продольной осью летательного аппарата 2, рукоятка 1 в кисти руки пилота воспринимается им ассоциативно как сам летательный аппарат 2, который он направляет в выбранную точку пространства с необходимым креном.
Совмещение осей вращения рукоятки 1 с кинематическим центром лучезапястного сустава руки пилота увеличивает длину биомеханического рычага, которая определяется расстоянием от лучезапястного сустава до удаленной от него точки контакта кисти пилота с рукояткой 1, что обеспечивает точную, без искажений передачу биомеханических воздействий руки пилота на датчики электродистанционной системы управления.
Установка рукоятки управления 1 на телескопической стойке 3 возможна как с одной из сторон (справа или слева) относительно кресла 4 пилота, так и между ног пилота, что позволяет выполнить регулировку установки рукоятки управления 1 при естественном, удобном для пилота положении руки, способствующему снятию напряжения, утомляемости и при необходимости произвести смену рук на рукоятке при управлении вспомогательными агрегатами на бортовой панели кабины.
В полете пилот интуитивно поворачивает рукоятку управления 1 как указку, курсор, пульт дистанционного управления или макет летательного аппарата в нужном направлении и с необходимым креном, при этом совместная работа каналов электродистанционной системы обеспечивает движение летательного аппарата 2 так, как будто в руке пилота не рукоятка управления 1, а сам летательный аппарат 2.
Установка рукоятки управления 1 между ног пилота, при утомлении руки или необходимости выполнить иные операции, обеспечивает пилоту возможность перехватить рукоятку 1 другой рукой (при необходимости, подрегулировав ее положение, изменив положение стойки).
Манипуляции пилота с рукояткой управления соответствуют движениям руки или макета летательного аппарата при совершении пилотом эволюций в процедуре «пеший по летному». Это фактически исключает процесс запоминания управленческих функций, ускоряет приобретение навыков управления, снижает психологическое напряжение и усталость, исключает возможность несогласованных и ошибочных действий пилота при возникновении внештатных ситуаций, способствует повышению надежности управления и безопасности полета, высвобождает ноги пилота для выполнения иных функций и сокращает сроки обучения летного контингента.
Таким образом, способ интуитивного управления летательным аппаратом, заключающийся в управлении креном, тангажом и курсом посредством вращения и отклонения рукоятки управления с тремя степенями свободы, все три оси вращения которой проходят через лучезапястный сустав кисти руки пилота, а геометрическая ось совпадает с продольной осью летательного аппарата обеспечивает ускорение процесса обучения пилотов, повышение точности, надежности управления и повышение безопасности полетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| МНОГОКАНАЛЬНЫЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2559188C1 |
| Тренажер авиационный на базе беспилотного летательного аппарата | 2023 |
|
RU2820357C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2420427C2 |
| Многофункциональное устройство управления подвижным объектом | 2015 |
|
RU2616231C2 |
| Система для балансирного управления летательным аппаратом | 2019 |
|
RU2728219C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2624760C1 |
| СПОСОБ КИНЕСТАТИЧЕСКОЙ ПЕРЕДАЧИ ЛЕТЧИКУ ПИЛОТАЖНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2095279C1 |
| ЭЛЕКТРОННЫЙ АВИАГОРИЗОНТ | 2017 |
|
RU2664789C1 |
Изобретение относится к способу интуитивного управления летательным аппаратом. Способ заключается в том, что управляют креном, тангажом и курсом посредством поворота по часовой стрелке или против и отклонения вверх-вниз, влево-вправо рукоятки управления, установленной на телескопической стойке и расположенной между ног пилота, при этом все три оси вращения рукоятки управления проходят через геометрический центр лучезапястного сустава кисти руки пилота, а геометрическая ось рукоятки совпадает с продольной осью летательного аппарата. Обеспечивается ускорение обучения пилотов, повышение точности и надежности управления, повышение безопасности полетов. 2 ил.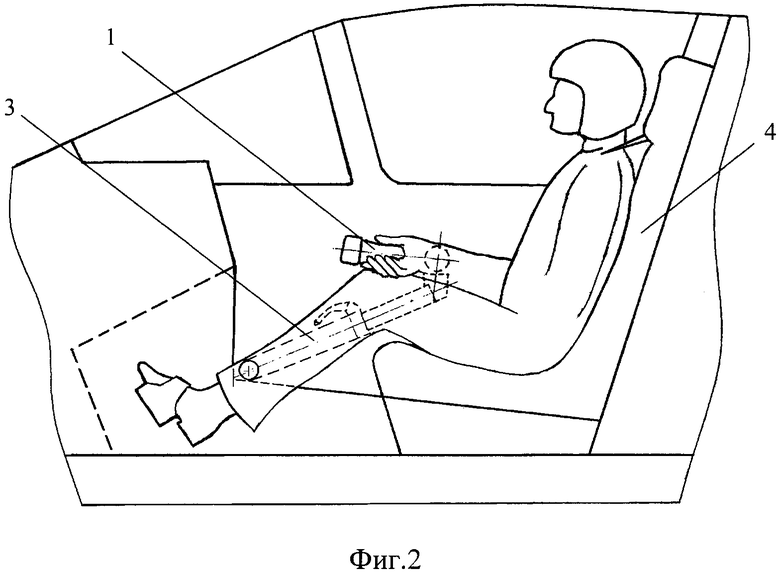
Способ интуитивного управления летательным аппаратом, заключающийся в управлении креном, тангажом и курсом посредством поворота по часовой стрелке или против и отклонения вверх-вниз, влево-вправо рукоятки управления, при котором все три оси вращения рукоятки управления проходят через геометрический центр лучезапястного сустава кисти руки пилота, отличающийся тем, что рукоятка управления установлена на телескопической стойке и расположена между ног пилота, а геометрическая ось рукоятки совпадает с продольной осью летательного аппарата.
| Многофункциональное устройство управления подвижным объектом | 2015 |
|
RU2616231C2 |
| СПОСОБ КИНЕСТАТИЧЕСКОЙ ПЕРЕДАЧИ ЛЕТЧИКУ ПИЛОТАЖНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2095279C1 |
| US 9718537 B2, 01.08.2017 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1991 |
|
RU2007335C1 |

