Предлагаемое изобретение относится к области судовождения - автоматическому управлению движением судна по заданному маршруту.
Известен способ автоматического управления движением судна, реализованный в «Системе автоматического управления движением судна», (RU 2240953 C1, 27.11.2004). Способ управления движением судна основан на использовании информация от приемника спутниковой навигационной системы, датчика угловой скорости, блока заданного значения путевого угла (угла курса) и сумматора, в котором по сигналам: текущего путевого угла, заданного путевого угла, угловой скорости судна формируется сигнал для управления рулевым приводом судна.
Известен также способ автоматического управления движением судна, (RU 2292289 C1, 27.01. 2007, принятый в качестве прототипа), в котором автоматическое управление движением судна осуществляется (аналогично описанному выше) с использованием: формирователя закона управления (сумматора), рулевого привода, блока выработки угловой скорости, датчика руля, приемника спутниковой навигационной системы, блоков текущего и заданного путевого угла (угла курса).
Известные способы автоматического управления движением судна, при спокойном море и безветрии, обеспечивают точное движение по заданному направлению, однако при появлении волнения на море принятые законы управления движением судна создают недопустимые условия в эксплуатации рулевого привода, также снижают скорость хода судна и создают при этом возможность появления аварийной ситуации.
Таким образом, применение оптимального закона управления (оптимального только для спокойного моря!) приводит при появлении волнения на море:
- к недопустимым перегрузкам рулевого привода,
- к потере скорости хода судна.
- к существенному снижению надежности (ресурса) системы управления движением.
Техническим результатом, предлагаемого способа автоматического управления движением судна, является формирование способа управления рулевым приводом с разными законами управления в зависимости от состояния моря (бортовой качки) и загрузки рулевого привода.
Технический результат достигается тем, что способ автоматического управления движением судна с учетом волнения включает датчик руля δ, датчик угловой скорости ω, датчик угла курса φ, задатчик угла курса φзд, рулевой привод и блок формирователь закона управления рулевым приводом, на вход которого вводятся сигналы:
- угла перекладки руля δ с датчика руля,
- угловой скорости ω с датчика угловой скорости,
- угла курса ϕ с датчика угла курса,
- заданного угла курса ϕзд с задатчика угла курса, на выходе блока формирователя закона управления рулевым приводом формируют сигнал управления рулевым приводом d/dt δ (1), который вводят на вход рулевого привода, при этом используется блок перестройки коэффициентов регулирования K1-К11, K2-K22, блок среднего значения модуля угла руля - |δ|ср, блок среднего значения модуля угла бортовой качки - |θ|ср, датчик угла бортовой качки судна - θ, задатчик допустимых значений средних значений модуля угла руля - |δ|ср.допус и модуля угла бортовой качки - |θ|ср.допус, сигналы |δ|ср.бонус и |θ|ср.допус с задатчика вводят на вход блока перестройки коэффициентов регулирования K1-K11, K2-K22, на два других входа которого вводят сигналы:
- среднего значения модуля угла бортовой качки - |θ|ср с блока среднего значения модуля угла бортовой качки - |θ|ср,
- среднего значения модуля угла руля - |δ|ср с блока среднего значения модуля угла руля - |δ|ср, на вход которого вводят сигнал угла руля - δ с датчика угла руля - δ, сигнал угла бортовой качки - θ (с датчика угла бортовой качки - θ) вводят на вход блока среднего значения модуля угла бортовой качки - |θ|ср.
Технический результат достигается путем:
- использования оптимального закона управления (близкого к оптимальному в смысле точности управления судном по заданному направлению) при отсутствии недопустимых перегрузок рулевого привода и при величине среднего значения модуля угла бортовой качки судна не превышающей допустимое значение;
- использования «облегченного» закона управления (в смысле загрузки рулевого привода) при наличии недопустимых перегрузок рулевого привода и величины среднего значения модуля угла бортовой качки судна превышающей допустимое значение.
Рассмотрим особенности формирования двух законов управления в предлагаемом способе управления.
1 При отсутствии перегрузок рулевого привода или не превышении величины среднего значения модуля угла бортовой качки судна допустимого значения используют: датчик руля δ, датчик угловой скорости ω, датчик угла курса ϕ, задатчик угла курса ϕзд и блок формирователь закона управления рулевым приводом, на выходе которого вырабатывается закон управления вида:

где: δ - угол перекладки руля,
φ, φ.зд - угол курса и заданный угол курса,
ω - угловая скорость судна,
K1, K2, K3 - коэффициенты регулирования, поступающие в формирователь закона управления рулевым приводом из блока перестройки коэффициентов регулирования K1-K11 и K2-K22,
Сигнал вида d/dt δ (1) с выхода блока формирователя закона управления рулевым приводом вводится на вход рулевого привода. Это обеспечивает автоматическое управление движением судна с минимальным рысканием по углу курса (при спокойном море);
2. При наличии перегрузок рулевого привода и превышения величины среднего значения модуля угла бортовой качки допустимого значения, вместо закона (1) формируется «облегченный» закон управления на выходе блока формирователя закона управления рулевым приводом вида:

где: K11<K1 и K22<K2, поступающие из блока перестройки коэффициентов регулирования K1-K11, K2-K22,
Формирование закона управления (1) или (1а) определяется выполнением условий (2а) или (2).
При выполнении условий (2):

в блоке формирования закона управления вырабатывается закон (1а).
Если условие (2) не выполняется, то выполняются условия (2а):

то в блоке формирования закона управления рулевым приводом вырабатывается закон (1).
Способ автоматического управления движением судна с учетом волнения использует: датчик руля δ, датчик угловой скорости ω, датчик угла курса ϕ, задатчик угла курса ϕзд, рулевой привод, блок перестройки коэффициентов регулирования K1-K11 и K2-K22, блок среднего значения модуля угла руля - |δ|ср, блок среднего значения модуля угла бортовой качки - |θ|ср, датчик угла бортовой качки судна - θ, задатчик допустимых значений средних значений модуля угла руля - |δ|ср.допус и модуля угла бортовой качки - |θ|ср.допус, а также блок формирователь закона управления рулевым приводом, на вход которого вводятся сигналы:
- угла перекладки руля δ с датчика руля,
- угловой скорости ω с датчика угловой скорости,
- угла курса ϕ с датчика угла курса,
- заданного угла курса φзд с задатчика угла курса,
- коэффициенты регулирования K1 или K11 и K2 или K22 с блока перестройки коэффициентов регулирования K1-K11 и K2-K22. На выходе блока формирователя закона управления рулевым приводом создается сигнал управления рулевым приводом d/dt δ, который вводят на вход рулевого привода. Рулевой привод автоматически удерживает судно на заданном курсе как при спокойном море, так и при штормовой погоде.
В зависимости от состояния погоды перестройка закона управления с (1) на (1а) осуществляется перестройкой коэффициентов регулирования: K1 заменяется на K11 и K2 заменяется на K22 в блоке формирователе закона управления рулевым приводом.
Сигналы коэффициентов регулирования K1 вместо K11 и K2 вместо K22 (или наоборот), поступающие в блок формирователь закона управления рулевым приводом, вырабатываются в блоке перестройки коэффициентов регулирования K1-K11 и K2-K22, с использованием сигналов из:
- блока среднего значения модуля угла руля - |δ|cp,
- блока среднего значения модуля угла бортовой качки - |θ|ср,
- датчика угла бортовой качки судна - θ,
- задатчика допустимых значений средних значений модуля угла руля - |δ|ср.допус и средних значений модуля угла бортовой качки - |θ|ср.допус.
Сигналы |δ|ср.допус и |θ|ср.допус с задатчика допустимых значений средних значений модулей углов руля и бортовой качки вводят на вход блока перестройки коэффициентов регулирования K1-K11 и K2-K22, на два других входа блока перестройки вводят сигналы:
- среднего значения модуля угла бортовой качки - |θ|ср с блока среднего значения модуля угла бортовой качки - |θ|ср,
- среднего значения модуля угла руля - |δ|ср с блока модуля среднего значения угла руля - |δ|ср, на вход которого вводят сигнал угла руля - δ с датчика угла руля - δ. Сигнал угла бортовой качки - θ (с датчика угла бортовой качки - θ вводят на вход блока среднего значения модуля угла бортовой качки - |θ|ср).
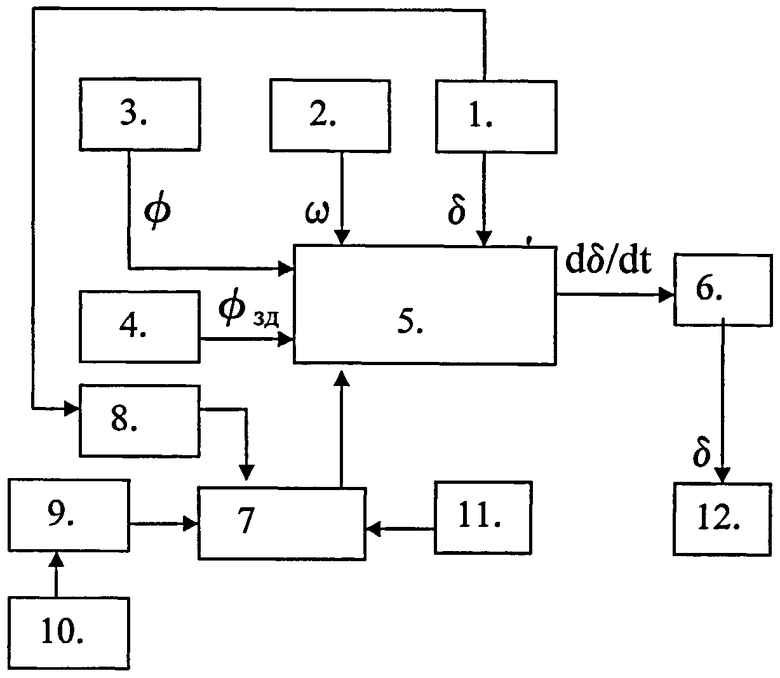
Система автоматического управления движением судна с учетом волнении (см. чертеж.)
Рассмотрим работу системы автоматического управления движением судна с учетом волнения, структура которой разработана с использованием предлагаемого способа управления движением судна с учетом волнения.
Система содержит: 1 Датчик руля. 2. Датчик угловой скорости. 3. Датчик угла курса. 4 Задатчик угла курса. 5 блок формирователь закона управления рулевым приводом. 6 Рулевой привод. 7 Блок перестройки коэффициентов регулирования K1-K11 и K2-K22. 8 Блок среднего значения модуля угла руля. 9 Блок величины среднего значения модуля угла бортовой качки. 10 Датчик угла бортовой качки судна. 11 Задатчик допустимых значений средних значений модулей углов руля и бортовой качки. 12 Судно - объект управления.
Все связи между блоками системы приведены на чертеже. Реализация предлагаемой системы может быть осуществлена с использованием микросхем типа 140 УД 6 и 140 УД-8, множительных блоков (это блоки - №5, №7, №9) и штатных судовых подсистем. Датчик угловой скорости 2 - типовой датчик угловой скорости типа - ДУС-5 с чувствительностью не ниже 0,05 Гр/с. Задатчик угла курса 4 - программный блок формирования сигнала заданного значения угла курса для движения по заданной траектории. Датчик угла курса 3 - гирокомпас типа «Гиря». Штатный судовой рулевой привод - 6.
Система обеспечивает движение корабля по заданной траектории с автоматической перестройкой закона управления (1) на закон (1а) и наоборот при изменении условий эксплуатации. На вход блока формирователя закона управления рулевым приводом - 5 поступают сигналы:
- угловой скорости судна ω - с датчика угловой скорости - 2,
- угла перекладки руля δ - с датчика руля - 1,
- текущего угла курса ϕ - с датчика курса - 3,
- заданного угла курса φзд - с задатчика угла курса - 4,
- коэффициенты регулирования K1 или K11 и K2 или K22 - с блока перестройки коэффициентов регулирования K1-K11 и K2-K22 - 7.
На выходе блока формирователя закона управления рулевым приводом - 5, вырабатывается заданное значение угловой скорости перекладки руля d/dt δзд.
В соответствии с зависимостью (1) или (1а) руль будет автоматически перекладываться и обеспечивать удержание судна на заданной траектории движения с углом курса ϕ равным заданному углу курса:
ϕ=ϕзд.
Установка зависимости (1) осуществляется в блоке формирователе закона управления рулевым приводом - 5 путем введения в блок - 5 коэффициентов регулирования K1, K2 из блока перестройки - 7 (вместо K11 и K22). Коэффициенты регулирования K1, К2 формируются на выходе блока - 7, если поступающие в блок - 7 сигнал из блока 9 среднего значения модуля угла бортовой качки - |θ|ср и сигнал из блока 8 среднего значения модуля угла руля |δ|ср не превышают сигналы допустимых значений средних значений модулей углов руля |δ|ср.допуст и бортовой качки |θ|ср.допуст, которые поступают из задатчика - 11 (установленные заранее судоводителем. При этом сформированная в блоке - 7 зависимость (2) удовлетворяется). Установка закона управления (1а) осуществляется в блоке формирователе закона управления рулевым приводом - 5, если в блоке 7 удовлетворяется зависимость (2а).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УМЕРЕНИЯ КРЕНА СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 2013 |
|
RU2531999C1 |
| Система управления движением судна с дублированием каналов курса и резервным управлением по курсу | 2017 |
|
RU2660193C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ | 2013 |
|
RU2525606C1 |
| СИСТЕМА ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2013 |
|
RU2536011C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| ОТКАЗОУСТОЙЧИВАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2013 |
|
RU2532000C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
Изобретение относится к области судовождения по заданному маршруту. Предложенный способ базируется на автоматическом управлении движением судна с двумя законами управления - оптимальным (в смысле точности стабилизации судна на курсе при спокойном море) и «облегченным» (для сохранности работоспособности рулевого привода при сильном волнении на море). Переключение законов управления осуществляется автоматически благодаря использованию блока перестройки коэффициентов регулирования, в котором формируют два условия переключения законов управления. В первом условии сигнал от среднего значения модуля угла руля больше допустимого значения и сигнал от среднего значения модуля угла бортовой качки больше допустимого значения. Во втором условии сигнал от среднего значения модуля угла руля меньше допустимого значения или сигнал от среднего значения модуля угла бортовой качки меньше допустимого значения. При выполнении первого условия формируют «облегченный» закон управления рулевым приводом. При выполнении второго условия формируют оптимальный закон управления курсом судна. Изобретение позволяет осуществлять управление рулевым приводом с разными законами управления в зависимости от состояния моря (бортовой качки) и загрузки рулевого привода, что обеспечивает оптимальность управления не только при спокойном море, но и при появлении на нем волнения. 1 ил.
Способ автоматического управления движением судна с учетом волнения, использующий датчик угла руля δ, датчик угловой скорости ω, датчик угла курса ϕ, задатчик угла курса ϕзд, рулевой привод и блок, формирователь закона управления рулевым приводом, на вход которого вводят сигналы:
- угла перекладки руля δ с датчика руля,
- угловой скорости ω с датчика угловой скорости,
- угла курса ϕ с датчика угла курса,
- заданного угла курса ϕзд. с задатчика угла курса,
на выходе блока формирователя закона управления рулевым приводом формируют сигнал управления рулевым приводом d/dt δ, который вводят на вход рулевого привода, отличающийся тем, что используют блок выработки коэффициентов регулирования K1-K11, K2-K22, блок среднего значения модуля угла руля - |δ|ср, блок среднего значения модуля угла бортовой качки - |θ|ср, датчик угла бортовой качки судна - θ, задатчик допустимых значений средних значений модуля угла руля - δср.допус и средних значений модуля угла бортовой качки - θср.допус, сигналы δср.допус и θср.допус с задатчика вводят на вход блока выработки коэффициентов регулирования K1-K11, K2-K22, на два других входа которого вводят сигналы:
- среднего значения модуля угла бортовой качки - |θ|ср с блока среднего значения модуля угла бортовой качки - |θ|ср,
- среднего значения модуля угла руля - |δ|ср с блока среднего значения модуля угла руля - |δ|ср, на вход которого вводят сигнал угла руля - δ с датчика угла руля - δ, сигнал угла бортовой качки - θ (с датчика угла бортовой качки - θ) вводят на вход блока среднего значения модуля угла бортовой качки - |θ|ср, в блоке выработки коэффициентов регулирования K1-K11, K2-K22 формируют:
а) сигналы коэффициентов регулирования: K1, K2 и K3, которые вводят в блок формирователя закона управления рулевым приводом при удовлетворении зависимости
|δ|ср<δдопуст или |θ|ср<θдопуст
или
б) сигналы коэффициентов регулирования: K11, K22 и K3, которые вводят в блок формирователя закона управления рулевым приводом при удовлетворении зависимости
|δ|ср≥δдопуст и |θ|ср≥θдопуст.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| Стенд для испытаний системы управления судном по курсу на волнении | 1982 |
|
SU1050967A2 |

