Изобретение относится к судостроению и предназначено для реализации автоматического управления движением морского судна.
Известно устройство (авт. св. СССР 460535), обеспечивающее автоматическое удержание судна на заданном курсе. Стабилизация курса осуществляется по данным гирокомпаса, который является основным источником информации о направлении движения судна. Сигнал текущего курса и его производная поступают на вход вычислителя (суммирующего устройства), на вход которого поступает также сигнал с датчика угла перекладки руля.
Рассматриваемый авторулевой обладает следующими недостатками:
- перегружает рулевой привод при развитом морском волнении;
- сигнал угла курса, вырабатываемый гирокомпасом, зашумлен и при дифференцировании не удается получить сигнал производной курса с требуемыми динамическими качествами, что исключает применение его на неустойчивых на курсе судах;
- нет сигнала угла дрейфа, что приводит к параллельному уходу судна с заданного направления движения при боковом ветре или течении.
Известна также "Аппаратура автоматического управления движением судна" (патент России 2144884, кл. В 63 Н 25/04), принятая нами в качестве прототипа, содержащая задатчик направления движения, датчик угла перекладки руля, выходы которых подключены к вычислителю (суммирующему усилителю). К вычислителю также подключены:
- сигналы с выхода приемника спутниковой навигационной системы (СНС), путевой угол (ПУ) и боковое отклонение (У);
- сигнал угла перекладки руля (δ);
- сигнал угловой скорости (производной путевого угла ω=d/dt ПУ), который вырабатывается дифференциатором и суммирующим блоком. Выход вычислителя подключен к входу рулевого привода, последний, отклоняя руль, удерживает судно на заданном направлении движения. Эта аппаратура автоматического управления движением судна обеспечивает автоматическое управление движением малотоннажного судна. Установка аппаратуры на крупнотоннажные суда не обеспечивает требуемой точности удержания крупнотоннажного судна на заданном направлении движения. Это связано с тем, что примененный типовой приемник спутниковой навигационной системы (СНС) с одной приемной антенной типа "Волонтер" не позволяет получить необходимую точность выработки значения путевого угла, т.к. путевой угол в существующих приемниках СНС с одной антенной вырабатывается с применением позиционно-скоростной информации от СНС. Восстановление сигнала производной от путевого угла (d/dt ПУ) путем дифференцирования сигнала ПУ не эффективно. Величина бокового отклонения (У) вырабатывается с временной задержкой и сильно зашумленной, поэтому дифференцирование этого сигнала для получения скорости бокового сноса (угла дрейфа β=d/dt У) также не эффективно.
Рассмотренная аппаратура имеет следующие недостатки:
- производная путевого угла (ω=d/dt ПУ) вырабатывается сильно зашумленной, что не позволяет применять эту аппаратуру на больших морских судах и на речных судах, неустойчивых на курсе;
- угол дрейфа вырабатывается также сильно зашумленным и, что особенно плохо, с временным запаздыванием;
- восстановление оценок основных фазовых координат состояния судна осуществляется также с сильными шумами;
- из-за низкочастотных помех наблюдается перегрузка рулевого привода.
В предложенной нами аппаратуре автоматического управления движением судна отмеченные выше недостатки устранены.
Задачей, решаемой настоящим изобретением, является создание аппаратуры для автоматического управления движением судна, обеспечивающей повышенную точность стабилизации судна и требуемый запас устойчивости замкнутой системы управления ("Аппаратура. .." эффективно работает как на устойчивых на курсе судах, так и на неустойчивых на курсе морских и речных судах).
Поставленная задача достигается тем, что в аппаратуру, содержащую задатчик путевого угла, датчик угла перекладки руля, рулевой привод, опорную антенну, подключенную к первому входу приемника спутниковой навигационной системы (СНС), вычислитель (состоящий из: суммирующего усилителя, двух интеграторов и дифференциатора), дополнительно введена вспомогательная антенна, подключенная к второму входу приемника СНС и, что весьма важно, существенно изменены связи с дифференциатором и другими блоками аппаратуры в соответствии с приведенной ниже функциональной схемой.
Существенной новизной предлагаемого изобретения является:
- выработка текущей угловой скорости не путем дифференцирования сигнала путевого угла, а путем дифференцирования курсового угла;
- курсовой угол (ϕ) вырабатывается в приемнике СНС, благодаря введению в аппаратуру вспомогательной (второй) антенны и применению нового метода обработки входной информации с использованием интерферометрического принципа;
- высококачественная выработка скорости бокового сноса - угла дрейфа β основана на использовании зависимости: β = ПУ-ϕ,
где путевой угол ПУ и угол курса ϕ формируются в приемнике СНС;
- использование рассмотренной выше дополнительной и более высококачественной информации обеспечивает астатическое управление движением судна по заданному направлению с повышенной точностью;
- выработка близких к оптимальным оценок основных фазовых координат производится с использованием полной модели движения судна (последнее стало возможным благодаря введению второго интегратора в схему электронной модели движения судна и наличию высококачественного сигнала угла дрейфа).
Функциональная схема предлагаемого изобретения приведена на чертеже.
Аппаратура автоматического управления движением судна содержит задатчик путевого угла 1, датчик угла перекладки руля 2, вычислитель 3, рулевой привод 4, опорную антенну 5, приемник спутниковой навигационной системы (СНС) 6, сумматор 7, первый интегратор 8, дифференциатор 9, второй интегратор 10 и вспомогательную антенну 11.
В качестве задатчика 1 и датчика угла перекладки руля 2 может быть использован любой аналоговый (цифровой) серийно выпускаемый преобразователь угла поворота с точностью не ниже 0,5%. В аналоговом варианте реализации аппаратуры в качестве вычислителя 3 (включающий в себя сумматор 7, два интегратора 8, 10 и дифференциатор 9) можно использовать набор интегральных микросхем типа 140-УД-6 и 140-УД-8, соединенных между собой в соответствии с чертежом. Опорная антенна 5 комплектуется вместе с приемником СНС 6 типа "Волонтер" (в нашей аппаратуре приемник дополнен вторым входом для подключения вспомогательной антенны. Приемник СНС-6 может также использоваться из аппаратуры Японской фирмы Furuno Elektric Co. LTD. "Model SC-120"). Сумматор 7 - интегральная микросхема типа 140-УД-6. Интегратор 8 - интегральная микросхема 140-УД-8. Дифференциатор 9 - интегральная микросхема типа 140-УД-6 с подключенным на вход конденсатором с малыми утечками. Вспомогательная антенна 11 может быть использована из угломерной аппаратуры типа МРК - 11 для спутниковых навигационных систем ГЛОНАС и GPS, разработки НИИ радиотехники Красноярского государственного технического университета. Возможен также вариант цифровой реализации вычислителя 3 на серийном микроконтроллере.
Аппаратура работает следующим образом.
Требуемое направление движения судна задается задатчиком путевого угла 1. Если это направление движения судна не совпадает с текущим направлением, то на выходе вычислителя 3 появится сигнал, приводящий к отклонению пера руля судна рулевым приводом 4, после чего начинается поворот судна к заданному направлению движения. При достижении судном заданного направления движения перо руля вернется в балансировочное положение.
Рассмотрим, как формируется закон управления рулевым приводом 4. Сигнал, пропорциональный текущему направлению движения судна ПУ, вырабатывается на первом выходе приемника СНС 6 и поступает через третий вход вычислителя 3 на третий вход сумматора 7, на первый вход которого поступает сигнал с задатчика 1 - заданное направление движения судна ПУ зад. На выходе сумматора 7 при этом будет формироваться сигнал отклонения судна от заданного направления движения: ΔПУ=ПУ-ПУ зад. Остальные сигналы, поступающие на вход сумматора 7, необходимы для обеспечения заданной точности стабилизации судна, а также для обеспечения требуемого запаса устойчивости замкнутой системы управления: "аппаратура...-рулевой привод-судно".
Сигнал бокового отклонения судна с заданного направления движения - "У" вырабатывается на втором выходе приемника СНС 6 и поступает через четвертый вход вычислителя 3 на четвертый вход сумматора 7, на второй вход которого поступает сигнал угла перекладки руля δ с датчика угла перекладки руля 2. Остальные два сигнала, также необходимые для управления β,ω, формируются в виде оценок, так как они непосредственно в аппаратуре не измеряются (следует заметить, что даже если бы и были такие измерители в аппаратуре, все равно использовать их нецелесообразно из-за сильного их зашумления при развитом морском волнении).
Выработка сигнала угла курса 
Высокую точность измерения угла поворота судна можно достичь при добавлении второй антенны - вспомогательной, размещенной также на судне с жестко фиксированным расстоянием межу двумя антеннами. Это позволит определять угол курса - ϕ с использованием интерферометрического принципа (см. Cohen С.Е. Attitude determination. Global Positioning System. Theory and Applications, American Institute of Aeronautics and Astronautics, Washington, D. C.-1996, Vol. II. Chapter 19. -P. 519-538). Суть его заключается в измерении разности фаз несущей частоты для сигналов, принимаемых от спутников на разнесенные антенны. В этих разностях, обусловленных неодинаковым расстоянием до спутников двух антенн, содержится информация об угле между направлением на спутники и вектором, образованным между двумя антеннами. С использованием данных об углах между направлениями на несколько спутников и двумя антеннами, с известным их расположением на судне, решается задача определения угла курса. Аналогичные системы в настоящее время разработаны и применяются в авиации (Graas F. V....Interferometric GPS flight reference autoland system: Flight test results. Navigation, USA. 1994, Vol. 41, 1.-P.57-82. Погрешность в измерении курсового угла в основном определяется отношением общей ошибки измерения смещения фазы, выраженной в единицах длины, к расстоянию между антеннами - длине базы. По данным IEEE Aerospace and Electronic Systems Society Las Vegas, Nevada. April 11-15, PLANS 94. -1994. Р. 806-812 точность колеблется в интервале 0,02-0,3 гр. при базе между антеннами L=40-1 м.
Приведенная точность измерения угла курса на порядки превышает точность выработки угла курса серийно выпускаемыми гирокомпасами. (Путевой угол при использовании позиционно-скоростной информации, применяемой в системе СНС "Волонтер" и др. аналогичных системах, измеряется также существенно грубее). Применив в нашей аппаратуре вспомогательную (вторую) антенну, удается выработать текущий угол курса - ϕ на третьем выходе приемника СНС 6, который через пятый вход вычислителя 3 поступает на вход дифференциатора 9. На выходе дифференциатора формируется (текущий) сигнал производной угла курса  который используется для формирования невязки Δω = ω-d/dtϕ, необходимой для выработки оценки угловой скорости судна ω.
который используется для формирования невязки Δω = ω-d/dtϕ, необходимой для выработки оценки угловой скорости судна ω.
Сигнал оценки угловой скорости судна ω вырабатывается на выходе первого интегратора 8, далее он поступает на пятый вход сумматора 7.
Определение текущего угла дрейфа βт.
При наличии в аппаратуре сигнала путевого угла ПУ и сигнала угла курса ϕ определение текущего угла дрейфа не представляет каких-либо трудностей, если использовать известную зависимость: βт = ПУ-ϕ. Текущий угол дрейфа в виде алгебраической суммы:
ПУ-ϕ поступает на третий и первый входы второго интегратора 10 и используется для формирования невязки: Δβ = (β-βт), формирование которой также осуществляется путем алгебраического суммирования текущего угла дрейфа βт. и оценки угла дрейфа β (последняя поступает на четвертый вход второго интегратора 10). Невязка необходима для формирования оптимальной оценки угла дрейфа β, которая вырабатывается на выходе второго интегратора 10 и поступает на шестой вход сумматора 7.
Таким образом на сумматоре 7 формируется закон управления вида:
d/dtδ = K1ΔПУ+K2β+K3ω+K4У-K5δ (1)
где d/dtδ,δ - скорость перекладки руля и угол перекладки руля,
ΔПУ=ПУ-ПУ зад. - отклонение судна с заданного путевого угла,
β - оценка угла дрейфа,
ω - оценка угловой скорости судна,
У - боковое отклонение судна,
К1-К5 - коэффициенты регулирования.
Рассмотрим процесс выработки оптимальных (близких к оптимальным) оценки сигнала угловой скорости ω на выходе первого интегратора 8 и оценки сигнала угла дрейфа β на выходе второго интегратора 10.
Необходимость получения оценок сигналов угловой скорости и угла дрейфа вызвана тем, что при формировании законов управления движением инерционными объектами, крутизна сигнала их относительно других сигналов, входящих в закон управления (1), часто на порядок выше и поэтому даже незначительные шумы, связанные с волнением на море, оказываются преобладающими и "забивают" остальные сигналы, что приводит к перегрузкам рулевого привода и даже его "заклинке".
Выработка оптимальных оценок базируется на использовании электронной модели движения судна и на наличии невязок по оцениваемым параметрам. Получение невязок в "аппаратуре..." Δω = ω-d/dtϕ, Δβ = (β-βт) мы рассмотрели выше.
Рассмотрим вид электронной модели движения судна и ее реализацию в аппаратуре автоматического управления движением судна. Математическая модель динамики движения судна, при постоянной скорости хода описывается двумя дифференциальными уравнениями:
Для вычисления оценок ω,β уравнения (2) дополняются невязками и имеют вид:
В "аппаратуре. . . " реализация зависимости (3) осуществляется на двух интеграторах 8, 10. Сигнал угла перекладки руля поступает с датчика угла перекладки руля 2 через второй вход вычислителя 3 на первый и второй входы соответственно первого и второго интеграторов. Сигналы (K11ω+K14ω) в виде суммы поступают на второй вход первого интегратора 8, аналогично сигналы (K22β+K24β) поступают на четвертый вход второго интегратора 10. Формирование невязок на входах обоих интеграторов было описано выше. (На чертеже формирование сигналов K12β+K21ω не показано, т.к. в ряде случаев они пренебрежимо малы). Сигнал управления рулевым приводом судна в соответствии с законом (1) поступает с выхода сумматора 7 на вход рулевого привода 4. Проведенное моделирование приведенных выше законов (1, 3) подтвердило возможность получения высокоэффективной аппаратуры автоматического управления движением судна как в отношении точности стабилизации судна на заданном путевом угле, так и в отношении запаса устойчивости замкнутой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 2000 |
|
RU2197016C2 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
Изобретение относится к судовождению, в частности к автоматическому управлению движением широкого класса морских и речных судов. Аппаратура автоматического управления движением судна содержит задатчик путевого угла, датчик угла перекладки руля, вычислитель, рулевой привод, опорную и вспомогательную антенну, приемник СНС, сумматор, два интегратора и дифференциатор. Достигаемым техническим результатом изобретения является повышение точности стабилизации судна и запаса устойчивости замкнутой системы управления. 1 ил.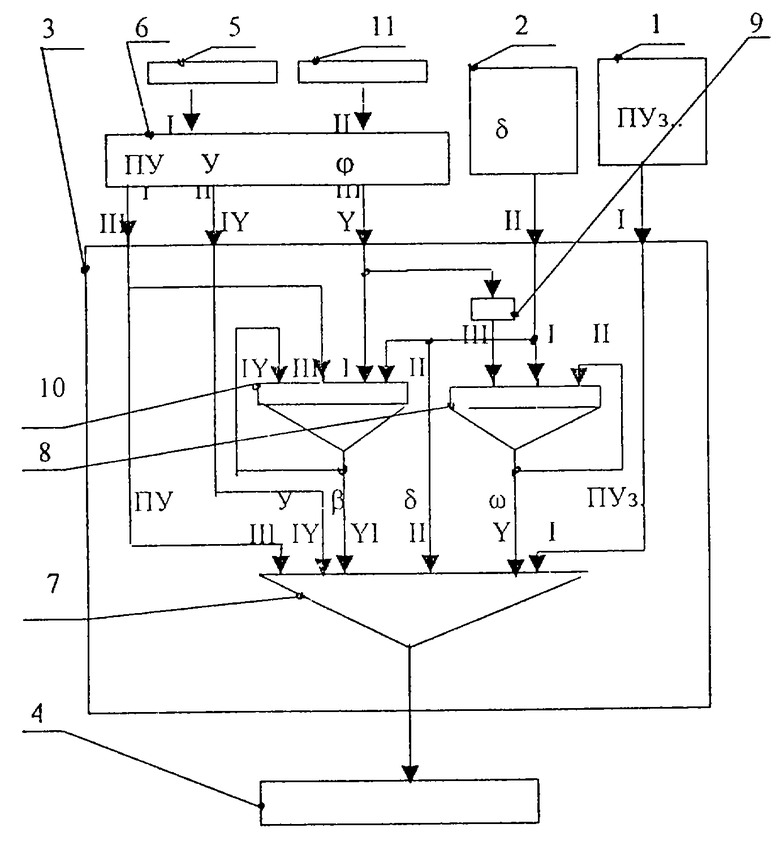
Аппаратура автоматического управления движения судна, содержащая задатчик путевого угла, датчик угла перекладки руля, опорную антенну, приемник спутниковой навигационной системы и вычислитель, содержащий сумматор, первый и второй интеграторы и дифференциатор, причем выходы задатчика путевого угла и датчика угла перекладки руля подключены соответственно к первому и второму входам вычислителя, опорная антенна подключена к первому входу приемника спутниковой навигационной системы, первый и второй выходы которого подключены соответственно к третьему и четвертому входам вычислителя, выход которого подсоединен к входу рулевого привода, при этом первый вход вычислителя соединен с первым входом сумматора, второй вход вычислителя подсоединен к второму входу сумматора и первому входу первого интегратора, третий и четвертый входы вычислителя соединены соответственно с третьим и четвертым входами сумматора, выход первого интегратора соединен с вторым входом этого же интегратора и пятым входом сумматора, выход которого подключен к выходу вычислителя, отличающаяся тем, что дополнительно содержит вспомогательную антенну, выход которой соединен со вторым входом приемника спутниковой навигационной системы, третий выход которого подключен к пятому входу вычислителя, пятый вход вычислителя через дифференциатор соединен с третьим входом первого интегратора и непосредственно подключен к первому входу второго интегратора, второй вход которого соединен с вторым входом вычислителя, третий вход второго интегратора подключен к третьему входу вычислителя, а выход второго интегратора соединен с четвертым входом этого же интегратора и шестым входом сумматора.
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| Устройство управления движением судна | 1981 |
|
SU979204A1 |
| US 3927635 A, 23.12.1975 | |||
| Устройство для подвода жидких компонентов в ферментатор | 1982 |
|
SU1068474A1 |

