Предлагаемое изобретение относится к области судовождения, в частности к управлению движением морскими и речными судами при наличии сильных внешних возмущений (течений, ветра).
В настоящее время разработано и эксплуатируется достаточно большое количество систем автоматического управления движением судна по заданному направлению (курсу или путевому углу), но при наличии сильных внешних возмущений известные системы не позволяют обеспечить требуемую точность стабилизации движения судна по заданной траектории относительно дна (земли или пирса).
Известна аппаратура автоматического управления движением судна, принятая в качестве прототипа (патент России №2144884). Аппаратура включает задатчик путевого угла, датчик угла перекладки руля, блоки формирования путевого угла и угловой скорости судна и рулевой привод, на вход которого поступают сигналы со всех перечисленных блоков. Отклонение судна с заданной траектории движения приводит к появлению рассогласования между величиной текущего путевого угла и заданным его значением, что вызывает соответствующее отклонение руля и возвращение направления движения судна на заданный путевой угол (часто смещенный параллельно относительно заданной траектории).
Недостатком рассмотренной системы является появление недопустимых отклонений движения судна от заданной траектории и сохранение или рост этого отклонения при постоянно действующих возмущениях (вызванных течением или ветром).
Постоянное отклонение судна от заданной траектории движения не позволяет эффективно использовать рассмотренную аппаратуру для достаточно широкого класса судов: паромы, укладчики подводного кабеля, навигационные, геолого-разведочный, промерные и др., движение которых должно проходить по заранее заданной траектории, жестко связанной с земной поверхностью.
В предлагаемой системе для обеспечения точности движения судна по заданной траектории предложено дополнить известную аппаратуру дифференциатором, блоком уставок и блоком логики, в котором выполняются следующие операции:
- при появлении отклонения по путевому углу более ΔПУ1=С1 в интервале времени не менее Δt сек вырабатывается поправка в закон управления,
- при появлении бокового отклонения судна от заданной траектории У1 более +/-С2 (метров) вводится коррекция в скорость движения судна,
- при изменении заданной траектории движения (Пузд) обе корректировки закона управления судном сбрасываются к нулю.
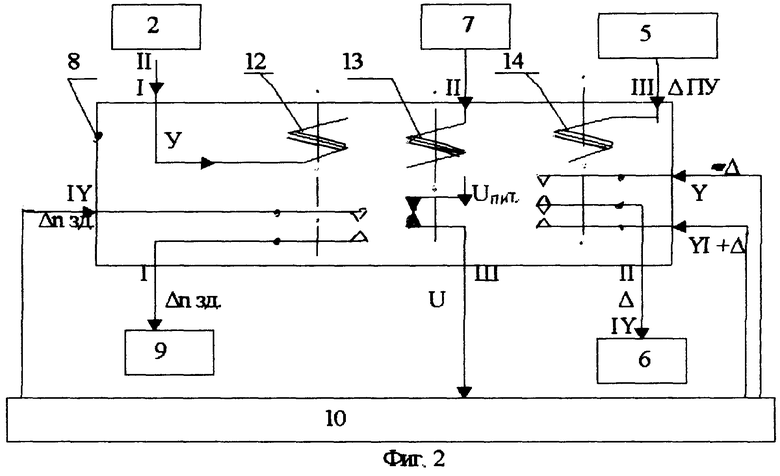
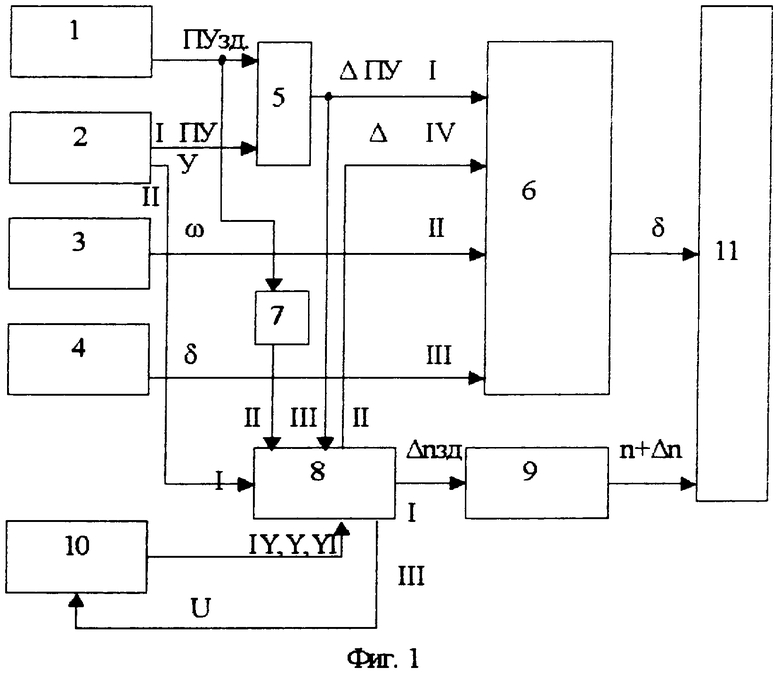
Функциональная схема системы автоматического управления движением судна приведена на фиг.1. Состав блока логики со связями в системе приведен на фиг.2.
Система автоматического управления движением судна состоит из задатчика путевого угла ПУзд 1, блока формирования путевого угла ПУ и бокового сноса судна У2, блока формирования угловой скорости ω3, датчика угла перекладки руля δ4, блока формирования приращения ΔПУ=ПУ-ПУзд 5, рулевого привода 6, дифференциатора 7, блока логики 8 (включающего первое-третье реле 12, 13, 14, см. фиг.2), главного двигателя 9, блока уставок 10, судна 11.
В качестве задатчика путевого угла 1, датчика угла перекладки руля 4 используется любой аналоговый (цифровой) преобразователь угла поворота в электрический сигнал с точность не хуже 3%, в качестве блока 2 используется приемник спутниковой навигационной системы, например, типа “Волонтер”, блок 3 - датчик угловой скорости типа ДУС-6, в аналоговом варианте исполнения блоки 5 и 7 могут быть реализованы на микросхеме типа 140 УД 6, рулевой привод 6 включает сумматор-усилитель на входе, блок логики 8 включает три электромагнитных реле: первое - 12 имеет настраиваемую величину напряжения срабатывания и значительно меньшую величину напряжения отпускания, второе - 13 имеет нормально замкнутую контактную группу; а третье реле 14 - поляризованное. Блок уставок 10 может быть реализован как делитель напряжения, причем величина напряжения Δ на входах Y и YI блока лолгики 8 может перестраиваться судоводителем вручную. Электропитание U на блок уставок 10 поступает из блока логики 8 через нормально замкнутую контактную группу второго реле 13.
Возможен вариант реализации предлагаемой системы с использованием типового микроконтроллера вместо рассмотренных выше аналоговых блоков.
Система работает следующим образом.
Заданная траектория движения судна устанавливается задатчиком путевого угла 1, при несовпадении задания с текущим значением путевого угла, который вырабатывается блоком 2 (приемником спутниковой навигационной системы (СНС)), сигнал рассогласования ΔПУ поступает на вход рулевого привода 6 через блок формирования приращения 5, что приведет к отклонению руля судна. При выходе судна на заданную траекторию руль судна вернется в нулевое положение. При движении судна-парома поперек течения будет происходить снос его с одновременным разворотом от воздействия течения.
Для удержания судна на заданном путевом угле потребуется дополнительное отклонение пера руля. Для создания этого отклонения в рассматриваемой системе в закон управления вводится дополнительный сигнал Δ.
Рассмотрим, как формируется этот дополнительный сигнал Δ в блоке логики 8. Сигнал рассогласования ΔПУ из блока 5 поступает в блок логики 8 на обмотку управления третьего реле 14, и при достижении сигнала рассогласования ΔПУ предельно допустимого уровня ΔПУ>С1 поляризованное реле 14 сработает и контактная группа замкнется с сигналом уставки +Δ либо с сигналом уставки -Δ, которая поступает из блока уставок 10. Знак сигнала уставки определяется знаком сигнала рассогласования +/-ΔПУ. Уставка Δ из блока логики 8 поступает на четвертый вход рулевого привода 6. Величина уставки может изменяться в зависимости от силы течения (как автоматически, так и вручную).
На входе рулевого привода, таким образом, формируется следующий закон управления рулем:
d/tδ=К1ΔПУ+К2ω-К3δ+Δ,
где d/tδ, δ - скорость и угол перекладки руля,
ω - угловая скорость судна,
K1 - коэффициенты регулирования.
Наличие в законе управления сигнала Δ вызовет возвращение судна к заданному путевому углу. Уставка Δ в законе управления сохраняется до момента времени, когда ΔПУ снизится достаточно близко к нулю, при этом контакты реле 14 разомкнутся, т.к. поляризованное реле 14 настроено на сигнал отключения существенно меньший сигнала срабатывания ΔПУ=С1.
Вследствие того, что происходили отклонения судна от заданного путевого угла, величина бокового сноса судна с заданной траекторией может достигнуть недопустимой величины У>С2, при этом сигнал бокового сноса из блока 2 поступит на обмотку первого реле 12. Реле сработает и сигнал уставки Δnзд из блока уставок 10 поступит через замкнувшуюся контактную группу первого реле 12 блока логики 8 в качестве дополнительной уставки на вход регулятора главного двигателя 9, т.е. величина задания оборотов главного двигателя увеличится: n=nзд.+Δnзд. Это приведет к увеличению оборотов гребного винта, а следовательно, и скорости хода судна. При уменьшении У (выходе судна на близкую к заданной траектории) реле 12 отключится, т.к. сигнал отключения реле 12 аналогично третьему реле существенно меньше сигнала срабатывания С2 (использование второй коррекции - скорости хода судна связано с тем, что при сильном течении, соизмеримом со скоростью хода суда, использование первой коррекции ΔПУ>С1 оказывается малоэффективной).
При изменении заданного направления движения (ПУзд) установившийся баланс параметров движения нарушается, поэтому блок логики 8 переводится в исходное состояние, когда обе коррекции отсутствуют. Это достигается введением дифференциатора 7 в рассматриваемую систему, на вход которого поступает сигнал с блока 1 ПУзд. При изменении ПУзд на выходе дифферециатора 7 вырабатывается напряжение, приводящее к срабатыванию второго реле 13 и сбрасыванию к нулю уставок в блоке уставок 10 путем снятия напряжения питания U с блока уставок (которое прерывается при размыкании нормально замкнутых контактов второго реле 13 на интервал времени Δt2.
Проведенное моделирование использования уставок для коррекции как закона управления рулем, так и скорости хода судна путем увеличения оборотов главного двигателя подтвердило эффективность использования такой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| Система управления движением судна с дублированием каналов курса и резервным управлением по курсу | 2017 |
|
RU2660193C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2465169C1 |
| СПОСОБ УПРАВЛЕНИЯ СБЛИЖЕНИЕМ КОРАБЛЯ С ПОДВИЖНОЙ ЦЕЛЬЮ | 2011 |
|
RU2467917C1 |
Изобретение относится к области управления движением судна при наличии (появлении) сильных возмущений (течений, ветра), в частности специальными судами, которые предназначены для движения по строго заданной траектории (относительно дна). Система содержит задатчик путевого угла, блок формирования путевого угла и бокового сноса судна, блок формирования угловой скорости и датчик угла перекладки руля, выход задатчика путевого угла и первый выход блока формирования путевого и бокового сноса судна подключены через блок формирования приращения к первому входу рулевого привода, к второму и третьему входам которого подключены соответственно выходы блока формирования угловой скорости и датчика угла перекладки руля. Дополнительно в систему введены три блока: дифференциатор, блок логики с тремя реле и блок уставок. При сильных возмущениях, приводящих к отклонению судна от заданного путевого угла, для устранения отклонения в закон управления рулевым приводом дополнительно вводится уставка Δ из блока уставок 10 в блок логики 8 и далее на вход рулевого привода 6, что приводит к дополнительному смещению руля. При существенном отклонении от заданной траектории движения уставка Δnзд поступает из блока уставок 10 на вход регулятора главного двигателя 9, что приведет к увеличению оборотов и скорости хода судна. После возвращения на заданную траекторию движения уставки отключаются. Технический результат заключается в повышении точности стабилизации судна относительно заданной траектории. 2 ил.
Система автоматического управления движением судна, содержащая задатчик путевого угла, блок формирования путевого угла и бокового сноса судна, блок формирования угловой скорости и датчик угла и перекладки руля, выход задатчика путевого угла и первый выход блока формирования путевого угла и бокового сноса судна подключены через блок формирования приращения к первому входу рулевого привода, к второму и третьему входам которого подключены соответственно выходы блока формирования угловой скорости и датчика угла перекладки руля, отличающаяся тем, что дополнительно введены дифференциатор, блок логики с тремя реле, блок уставок и главный двигатель, к входу которого подключен первый выход блока логики, второй выход которого подключен к четвертому входу рулевого привода, а третий выход - к входу блока уставок, первый вход блока логики соединен с вторым выходом блока формирования путевого угла и бокового сноса судна, а второй вход блока логики через дифференциатор соединен с выходом задатчика путевого угла, третий вход блока логики соединен с выходом блока формирования приращения, с первым, вторым и третьим входами блока логики соединены соответственно обмотки первого, второго и третьего реле, четвертый, пятый и шестой входы блока логики соединены с выходами блока уставок, четвертый вход блока логики соединен через нормально разомкнутую контактную группу первого реле с первым выходом блока логики, второй выход блока логики соединен через нормально разомкнутые контактные группы третьего реле соответственно с пятым и шестым входами блока логики, а третий выход блока логики соединен через нормально замкнутую контактную группу второго реле с электропитанием.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| Устройство управления движением судна | 1981 |
|
SU979204A1 |
| ВИХРЕВАЯ ПРЯМОТОЧНАЯ ГИДРОТУРБИНА ДЛЯ ИСПОЛЬЗОВАНИЯ ЭНЕРГИИ ТЕЧЕНИЙ РЕК И ПРИЛИВОВ | 2007 |
|
RU2359149C1 |
| US 5983145, 09.11.1999. | |||

