Область техники, к которой относится изобретение
Настоящее изобретение относится к устройствам и способам управления профилем движения кабины лифта и может применяться в лифтостроительной области техники.
Уровень техники
Лифтовые системы удобны для доставки пассажиров, грузов или того и другого, например, между разными этажами здания. При рассмотрении работы лифтовой системы возникает несколько замечаний. Например, существует предпочтение более эффективно обслужить пассажиров. Один из способов, по которым это реализуется в уровне техники, заключается в том, чтобы управлять временем нахождения кабины лифта в движении при ее перемещении между этажами задания. Существуют практические ограничения на время нахождения кабины лифта в движении, определяемые механическим оборудованием, используемым для движения лифта и желанием обеспечить определенный уровень качества движения. Например, пассажиры ощущали бы дискомфорт при определенных значениях ускорения или замедления движения кабины лифта. Поэтому вводятся определенные ограничения на комфортность, обеспечивающие пассажирам удобное перемещение.
Существуют конкурирующие соображения при попытке достичь максимальных параметров управления движением лифтовой системы (то есть минимизировать время нахождения кабины лифта в движении) и одновременно максимального комфорта движения для пассажиров. Изменение параметров управления в направлении снижения времени нахождения кабины лифта в движении обычно приводит к снижению качества движения. Наоборот, изменение параметров управления в направлении повышения качества движения вызывает потери в отношении времени нахождения кабины лифта в движении.
Например, способ управления лифтом обычно определяет профиль движения кабины лифта, в котором установлены ограничения на скорость, ускорение и изменение ускорения. Если уровни вибрации в кабине лифта становятся слишком высокими, то при обычном способе необходимо уменьшить величины изменения ускорения, самого ускорения, скорости или их комбинации. Однако попытки минимизировать вибрацию и улучшить качество движения обычно приводят к увеличению соответствующего времени нахождения кабины лифта в движении. Для сохранения комфортности поездки следует снизить, например, ускорение для улучшения качества движения. Однако, к сожалению, снижение ускорения увеличивает время нахождения в движении для конкретного рейса кабины, что может доказывать неприемлемость или неэффективность такой меры в отношении производительности. Если поставлена цель избежать увеличения времени нахождения в движении при одновременном снижении ускорения в попытке улучшить комфорт для пассажиров, то обычно можно прибегнуть к соответствующему увеличению скорости изменения ускорения. Однако большие значения изменения ускорения приводят к увеличению вибрации в кабине лифта, что опровергает довод о первостепенном значении снижения ускорения (например, для улучшения качества движения или комфорта пассажиров).
Типичный профиль движения лифта, известный из уровня техники, включает, в основном, профиль изменения ускорения в виде прямоугольных импульсов. Установление соответствующих ограничений на ускорение, скорость и изменение ускорения дает возможность регулировать комфорт перемещения пассажиров в таком рейсе лифта.
Было бы полезным иметь возможность регулировать профиль движения лифта таким образом, чтобы обеспечивать заданный уровень качества движения без снижения параметров, например, за счет увеличения времени нахождения кабины в движении.
Раскрытие изобретения
Настоящее изобретение описывает устройство управления профилем движения кабины лифта, включающее контроллер, выполненный с возможностью перемещения соответствующей кабины лифта с профилем движения, содержащим группу значений изменения ускорения, и осуществления по меньшей мере одного перехода между двумя значениями изменения ускорения со скоростью другой в сравнении со скоростью скачкообразного перехода.
Контроллер может быть выполнен с возможностью осуществления первого перехода между двумя значениями изменения ускорения с первой скоростью перехода, другой в сравнении со второй скоростью второго перехода между двумя значениями изменения ускорения.
Котроллер также может быть выполнен с возможностью использования первой и второй скоростей перехода во время рейса соответствующей кабины лифта между начальным местоположением и назначенной остановкой.
Первая скорость перехода может быть больше второй скорости перехода.
Первая скорость перехода также может соответствовать скорости скачкообразного перехода.
По меньшей мере одна скорость из первой или второй скоростей перехода может быть постоянна.
Профиль движения может содержать профиль изменения ускорения, имееющий скачкообразный переход в начале и в конце рейса соответствующей кабины лифта и наклонные переходы между разными значениями изменения ускорения от начала до окончания рейса.
Участок профиля движения между началом рейса и средней точкой рейса может быть асимметричен.
Участок профиля движения между средней точкой рейса и окончанием рейса может быть зеркально симметричен участку профиля движения между началом и средней точкой рейса.
Также настоящее изобретение описывает способ управления профилем движения кабины лифта, включающий приведение кабины лифта в движение с профилем движения, содержащим группу значений изменения ускорения, и осуществление переходов между двумя значениями изменения ускорения со скоростью другой в сравнении со скоростью скачкообразного перехода.
В способе могут осуществлять переход между двумя значениями изменения ускорения с первой скоростью перехода, другой в сравнении со второй скоростью перехода между двумя значениями изменения ускорения.
Возможно использование в способе первой и второй скорости перехода во время рейса кабины лифта между начальным положением и назначенной остановкой.
В способе первая скорость перехода может быть больше второй скорости перехода.
Первая скорость перехода может соответствовать скачкообразному переходу.
В способе по меньшей мере одна скорость из первой или второй скоростей перехода может быть постоянна.
Профиль движения может содержать профиль изменения ускорения, имеющий скачкообразный переход в начале и в конце рейса кабины лифта и наклонные переходы между разными значениями изменения ускорения от начала до окончания рейса.
В способе могут управлять профилем движения для его асимметрии между началом и средней точкой рейса кабины лифта.
Также в способе могут управлять профилем движения между средней точкой и окончанием рейса для его зеркальной симметрии участку профиля движения между началом и средней точкой рейса.
Различные свойства и преимущества раскрытых вариантов станут более понятны специалистам в данной области техники из нижеследующего подробного описания. Чертежи, сопровождающие подробное описание, могут быть вкратце представлены следующим образом.
Краткое описание чертежей
На фиг.1 схематически представлен профиль движения кабины лифта в соответствии с предшествующим уровнем техники.
На фиг.2 схематически изображены отдельные части приведенной в качестве примера осуществления лифтовой системы.
На фиг.3 схематически представлен приведенный в качестве примера осуществления профиль движения кабины лифта, сформированный в соответствии с одним из вариантов осуществления настоящего изобретения.
На фиг.4 схематически изображен другой приведенный в качестве примера осуществления профиль движения кабины лифта.
Осуществление изобретения
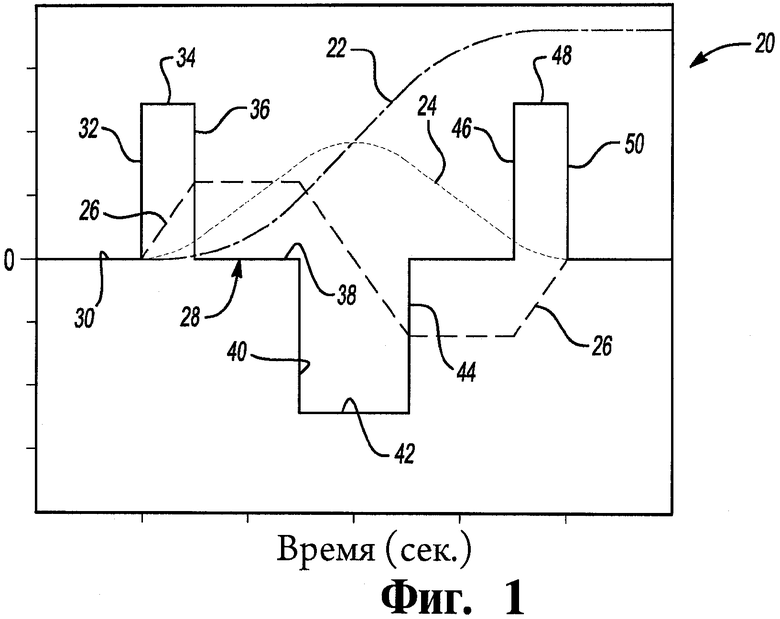
На фиг.1 представлен типичный профиль 20 движения лифта предшествующего уровня техники. Первая кривая 22 отражает положение кабины лифта в одиночном рейсе от начального положения к выбранной посадочной площадке на назначенной остановке. Скорость кабины лифта изображена кривой 24. График соответствующего ускорения представлен кривой 26. В представленном на фиг.1 примере введена кривая 28, отражающая значения изменения ускорения во время рейса кабины лифта. В данном примере величина изменения ускорения начинается с позиции 30 и скачкообразно изменяется на позиции 32 до максимальной величины, обозначенной позицией 34. В тот же момент времени (например, обозначенный позицией 32) в данном примере возникает ускорение кабины лифта. Как только ускорение достигает постоянного уровня, величина изменения ускорения на позиции 36 скачкообразно изменяется обратно до нулевого значения, показанного позицией 38. По мере продолжения движения кабины лифта в данном примере на определенном расстоянии от назначенной посадочной площадки начинается ряд операций торможения. Это приводит к скачку изменения ускорения, обозначенном позицией 40, до уровня, соответствующего позиции 42, что в свою очередь приводит к началу уменьшения ускорения. По мере приближения кабины лифта к назначенной посадочной площадке значение изменения ускорения, обозначенное позицией 42, остается неизменным до тех пор, пока значение ускорения не пересечет нулевую отметку и станет величиной с обратным знаком относительно величины, достигнутой на позиции 36. Это вызывает скачок изменения ускорения на позиции 44. По мере приближения кабины лифта к посадочной площадке происходит скачкообразное изменение ускорения на позиции 46 обратно до максимального значения, обозначенного позицией 48, и, наконец, скачкообразное изменение ускорения на позиции 50 обратно вниз до нулевого значения.
Как можно понять из фиг.1, типичный профиль движения лифта для предшествующего уровня техники включает в основном профиль изменения ускорения в виде прямоугольных импульсов. Установление соответствующих ограничений на ускорение, скорость и изменение ускорения дает возможность управлять комфортностью перемещения пассажиров в таком рейсе (движении) лифта.
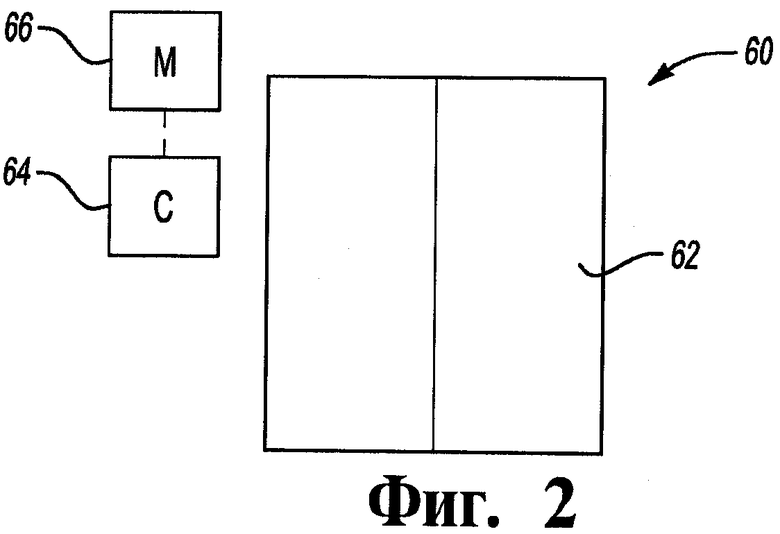
На фиг.2 схематически изображены отдельные части лифтовой системы 60. Кабина 62 лифта подвешена с возможностью перемещения, например, в шахте лифта. Контроллер 64 выполнен с возможностью управления работой подъемного механизма 66, так чтобы обеспечивать требуемое перемещение кабины 62 лифта. Контроллер 64 выполнен с возможностью вызывать перемещение кабины 62 лифта в соответствии с профилем движения, включающим группу значений изменения ускорения. Контроллер 64 выполнен с возможностью, чтобы по меньшей мере один переход между двумя значениями изменения ускорения происходил со скоростью не скачкообразного перехода (другой в сравнении с мгновенным переходом). Регулирование перехода между разными значениями изменения ускорения приводит к снижению величины вибрации в кабине 62 лифта, что улучшает качество движения кабины лифта. Вместе с тем, время нахождения в движении для рейса кабины лифта не увеличивается при использовании не скачкообразного (другого в сравнении с мгновенным) перехода между разными значениями изменения ускорения.
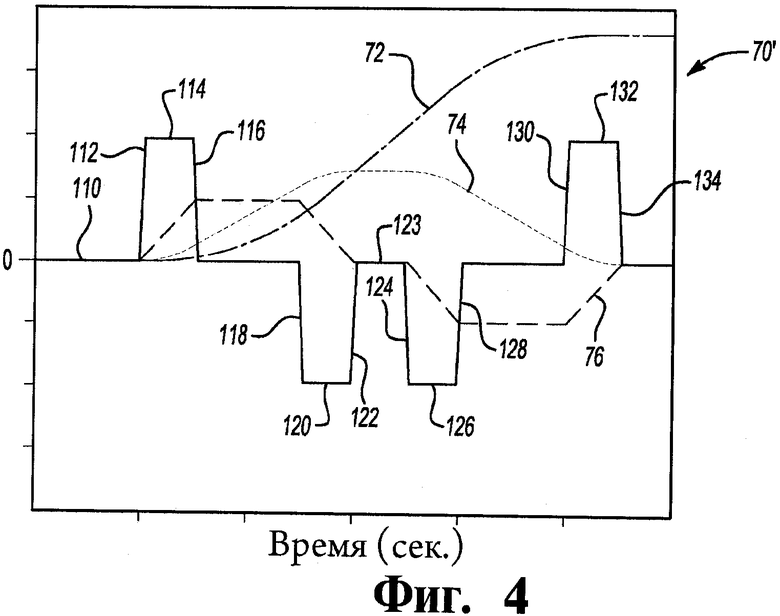
На фиг.3 схематически представлен профиль 70 движения лифта. Профиль движения создается контроллером 64, вырабатывающим, например, команды регулирования работы подъемного механизма 66. Кривая 72 отражает изменение положения кабины 62 лифта в одном рейсе, например, между начальным местоположением и назначенной остановкой. Кривая 74 соответствует скорости кабины лифта в течение того же рейса. Другая кривая 76 отображает соответствующее ускорение.
Значения изменения ускорения для представленного в качестве примера осуществления профиля 70 движения отсчитываются от позиции 78, соответствующей времени до начала движения кабины 62 лифта. На позиции 80 происходит скачкообразный переход до максимального значения измерения ускорения, отображенного позицией 82. В данном варианте осуществления изобретения скачкообразный переход на позиции 80 соответствует началу перемещения кабины лифта. Значение изменения ускорения остается максимальным, соответствующим позиции 82, в то время как изменение кривой 76 разгона (то есть наклон кривой) остается относительно постоянным.
Затем достигается точка, в которой сохранение изменение ускорения, соответствующее позиции 82, могло бы привести к превышению значением ускорения заданного для него предела. Переход изменения ускорения на позиции 84 вызывается контроллером 64, приводящим к переходу от изменения ускорения, соответствующего позиции 82, к более низкому значению, соответствующему позиции 86. В данном варианте осуществления изобретения значение изменения ускорения, соответствующее позиции 86, равно нулю. Характер перехода на позиции 84 не скачкообразный. Как можно видеть на фиг.3, линия, соответствующая позиции 84, проходит с наклоном относительно вертикальной линии, и переход между значениями, соответствующими позициям 82 и 86, происходит в течение определенного времени. Использование не скачкообразного перехода на позиции 84 снижает величину вибрации, вызываемой переходом между значениями изменения ускорения.
В представленном на фиг.3 варианте осуществления нулевое значение на позиции 86 сохраняется определенное время, и затем осуществляется другой переход, отраженный позицией 88, вниз к отрицательному значению изменения ускорения, соответствующему позиции 90. Переход на позиции 88 осуществляется не скачкообразно. В некоторых вариантах осуществления изобретения скорость перехода на позиции 84 соответствует скорости перехода на позиции 88. В других вариантах осуществления на участках, соответствующих позициям 84 и 88 на фиг.3, используются разные скорости перехода. Обе скорости перехода, соответствующие позициям 84 и 88, отличаются от скорости перехода, показанного на позиции 80. Обе скорости перехода, соответствующие позициям 84 и 88, меньше скорости на позиции 80, соответствующей скачкообразному переходу.
На фиг.3 схематически показана средняя точка 92 профиля 70 движения. Средняя точка 92 достигается, например, тогда, когда кабина 62 движется с максимальной или с нормированной скоростью во время рейса. Представленный на фиг.3 профиль 70 движения включает зеркально симметричное изображение на каждой стороне относительно средней точки 92. Скорость перехода на позиции 94 между значениями изменения ускорения 90 и 96 соответствует, например, скорости перехода на позиции 88. Скорость 98 перехода между значениями изменения ускорения 96 и 100 соответствует скорости перехода на позиции 84. Зеркальная симметрия не является обязательной, так как наклон изменения ускорения может легко изменяться. Максимальная величина изменения ускорения, показанная на позиции 100, связана с остановкой кабины 62 лифта у пункта назначения. В данном варианте осуществления величина изменения ускорения на позиции 100 соответствует показанной на позиции 82. Скачкообразный переход от значения на позиции 100 обратно до нуля происходит на позиции 102 при полной остановке кабины 62 лифта.
На фиг.3 скорости перехода на позициях 80 и 102 соответствуют скачкообразному переходу. Скорости не скачкообразных переходов 84, 88, 94 и 98 используются при нахождении кабины 62 лифта в движении во время назначенного рейса.
Одна из особенностей представленного на фиг.3 варианта осуществления изобретения заключается в том, что определенные части профиля движения могут рассматриваться как асимметричные в том смысле, что используются разные скорости перехода по разные стороны от конкретного значения изменения ускорения. Например, скорость перехода на позиции 80 отличается от скорости перехода на позиции 84, и каждая из них имеет место на противоположных концах временного интервала, в течение которого величина изменения ускорения соответствует позиции 82. Это существенно отличается от симметричной картины, такой как прямоугольные импульсы на фиг.1, на которой скорости перехода на противоположных концах разных значений изменения ускорения все одинаковы (то есть соответствуют скорости скачкообразного перехода). Понятно, что скорость перехода у противоположных концов конкретного значения изменения ускорения в других частях профиля движения может быть симметричной, например там, где скорость перехода у каждого конца соответствует не скачкообразному переходу (так, как на позициях 88 и 94 с фиг.3).
На фиг.4 представлен вариант, в котором скорость не скачкообразного перехода используется при всех трансформациях значений изменения ускорения для приведенного в качестве образца профиля 70' движения лифта. В приведенном на фиг.3 варианте осуществления профиль 70 движения включает конфигурацию изменения ускорения, имеющую вертикальные переходы в начале и в конце показанного одиночного рейса кабины 62 лифта. Между разными значениями изменения ускорения, которые имеют место в промежутке от начала и до окончания рейса кабины лифта, происходят переходы с наклоном (например, не скачкообразные). На фиг.4 каждый переход между разными значениями изменения ускорения происходит со скоростью не скачкообразного перехода (например, ни одна из соответствующих переходу частей профиля изменения ускорения не совпадает со строго вертикальной линией).
В представленном на фиг.4 варианте осуществления отсчет значений изменения ускорения начинается у позиции 110, и затем происходит не скачкообразный переход к максимальному значению изменения ускорения, соответствующему позиции 114. Это совпадает с началом движения, например, кабины 62 лифта. Представленный на фиг.4 вариант осуществления отличается от варианта с фиг.3 тем, что скорость перехода на позиции 112 соответствует не скачкообразному переходу, в то время как скорость перехода на позиции 80 в варианте с фиг.3 соответствовала скачкообразному переходу (то есть изображенному на названной фигуре вертикальной линией).
Другой переход на позиции 116 происходит между максимальным значением величины изменения ускорения, соответствующим позиции 114, и нулевым значением этой величины. Затем в процессе движения лифта на позиции 118 происходит другой переход вниз до минимального значения изменения ускорения, соответствующего позиции 120. Скорость перехода на позиции 116 может быть такой же, как скорость перехода на позиции 118. На позиции 122 происходит не скачкообразный переход обратно до нулевого значения изменения ускорения. В данном варианте средняя точка 123 профиля 70' движения располагается там, где значение ускорения и значение изменения ускорения равны нулю. Скорость перехода на позиции 124 сохраняется до тех пор, пока значение изменения ускорения не достигнет минимума, соответствующего позиции 126. Другие не скачкообразные переходы происходят на позициях 128 и 130. Вблизи окончания рейса лифта максимальное изменение ускорения происходит на позиции 132, и затем следует возвращение со скоростью 134 не скачкообразного перехода обратно к нулевому значению изменения ускорения.
В представленном на фиг.4 варианте, аналогично варианту с фиг.3, профиль 70' симметричен относительно своей средней точки 123. В некоторых вариантах профилю не нужно быть симметричным в смысле как одинаковости скоростей перехода, так и моментов времени движения кабины, в которые эти переходы происходят.
В некоторых вариантах осуществления скорости не скачкообразных переходов постоянны. В некоторых вариантах осуществления скорость перехода изменяется во время перехода между двумя величинами изменения ускорения (например, во время такого перехода изменение ускорения отображается по меньшей мере частично искривленной линией).
Одна из особенностей представленных вариантов заключается в том, что регулирование скорости перехода изменения ускорения дает возможность выбора конкретного уровня качества движения. Скорости не скачкообразных переходов, используемые между разными значениями изменения ускорения, не оказывают влияния на динамические характеристики шахты лифта в процессах ускорения и замедления движения кабины, что может обеспечить улучшенное качество движения. В одном из вариантов осуществления можно достичь приблизительно 20-процентного снижения уровня вибрации за счет использования не скачкообразного перехода между разными значениями изменения ускорения.
Как показано в представленных вариантах осуществления, степень воздействия усилия на лифтовую систему можно регулировать. Регулирование изменения ускорения с целью сглаживания последнего дает возможность улучшения качества движения за счет воздействия на систему плавного "продвижения", а не "рывков". Другими словами, не скачкообразные переходы между значениями изменения ускорения обеспечивают более гладкое изменение ускорения и в результате пониженную вибрацию. В рассмотренных вариантах осуществления можно достичь большего комфорта движения без увеличения времени, необходимого для рейса кабины.
В то же время в представленных вариантах осуществления не требуется увеличения времени нахождения в движении, например, за счет снижения максимальных значений ускорения или изменения ускорения. В приведенных вариантах осуществления можно достичь требуемого качества движения при заданном времени нахождения в движении. Можно сохранить заданный уровень качества движения и при этом снизить время нахождения в движении.
Предшествующее описание по своей сути служит для иллюстрации, а не для ограничения объема изобретения. Специалистам в данной области техники могут стать очевидными различные изменения и модификации представленных вариантов, которые не выходят за рамки сущности данного изобретения. Объем правовой защиты, присущий данному изобретению, может быть определен только из рассмотрения нижеследующей формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛИФТОВОЙ СИСТЕМОЙ С ГРУППОЙ КАБИН И ЛИФТОВАЯ СИСТЕМА | 2006 |
|
RU2423310C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛИФТОВОЙ СИСТЕМОЙ И ЛИФТОВАЯ СИСТЕМА | 2008 |
|
RU2467942C2 |
| СПОСОБ ПОДДЕРЖАНИЯ РАЗДЕЛИТЕЛЬНОЙ ДИСТАНЦИИ В МНОГОКАБИННОЙ ЛИФТОВОЙ ШАХТЕ И ЛИФТОВАЯ СИСТЕМА | 2007 |
|
RU2456225C2 |
| СПАСАТЕЛЬНАЯ ЛИФТОВАЯ СИСТЕМА | 2009 |
|
RU2500604C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛИФТАМИ И СПОСОБ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ЛИФТАМИ | 2006 |
|
RU2378178C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2487074C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КАБИНЫ ЛИФТА И ЛИФТОВАЯ СИСТЕМА | 2008 |
|
RU2482049C2 |
| Способ управления лифтом и лифт | 2013 |
|
RU2615816C2 |
| СПОСОБ СОГЛАСОВАНИЯ ДВИЖЕНИЯ ГРУППЫ КАБИН ЛИФТА, ЛИФТОВАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ КАБИН В ШАХТЕ ЛИФТА | 2007 |
|
RU2442738C1 |
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
Изобретение относится к области подъемников и предназначено для управления двигателем кабины лифта. При управлении профилем (70) движения кабины лифта контроллером, перемещают кабину лифта с профилем (70) движения. Профиль (70) движения содержит группу значений изменения ускорения. Осуществляют переход между двумя значениями изменения ускорения со скоростью, другой в сравнении со скоростью скачкообразного перехода. Достигается снижение уровня вибрации в кабине, достижение большего комфорта в движении без увеличения времени, необходимого для рейса кабины. 2 н. и 16 з.п. ф-лы, 4 ил.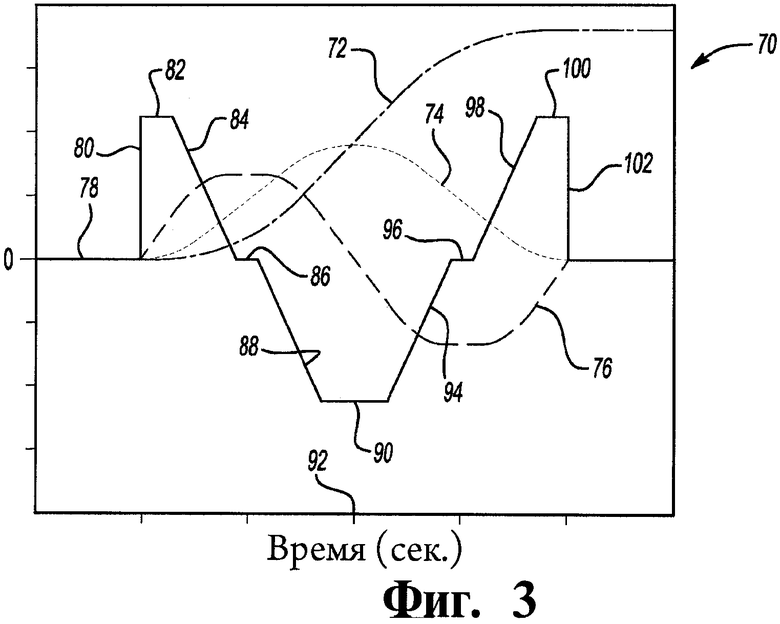
1. Устройство управления профилем движения кабины лифта, включающее контроллер, выполненный с возможностью перемещения соответствующей кабины лифта с профилем движения, содержащим группу значений изменения ускорения, и осуществления, по меньшей мере, одного перехода между двумя значениями изменения ускорения со скоростью, другой в сравнении со скоростью скачкообразного перехода.
2. Устройство по п.1, в котором контроллер выполнен с возможностью осуществления первого перехода между двумя значениями изменения ускорения с первой скоростью перехода, другой в сравнении со второй скоростью второго перехода между двумя значениями изменения ускорения.
3. Устройство по п.2, в котором контроллер выполнен с возможностью использования первой и второй скоростей перехода во время рейса соответствующей кабины лифта между начальным местоположением и назначенной остановкой.
4. Устройство по п.2, в котором первая скорость перехода больше, чем вторая скорость перехода.
5. Устройство по п.4, в котором первая скорость перехода соответствует скорости скачкообразного перехода.
6. Устройство по п.2, в котором, по меньшей мере, одна скорость из первой или второй скоростей перехода постоянна.
7. Устройство по п.1, в котором профиль движения содержит профиль изменения ускорения, имеющий скачкообразный переход в начале и в конце рейса соответствующей кабины лифта и наклонные переходы между разными значениями изменения ускорения от начала до окончания рейса.
8. Устройство по п.1, в котором участок профиля движения между началом рейса и средней точкой рейса асимметричен.
9. Устройство по п.8, в котором участок профиля движения между средней точкой рейса и окончанием рейса зеркально симметричен участку профиля движения между началом и средней точкой рейса.
10. Способ управления профилем движения кабины лифта, включающий приведение кабины лифта в движение с профилем движения, содержащим группу значений изменения ускорения, и осуществление переходов между двумя значениями изменения ускорения со скоростью, другой в сравнении со скоростью скачкообразного перехода.
11. Способ по п.10, в котором осуществляют переход между двумя значениями изменения ускорения с первой скоростью перехода, другой, в сравнении со второй скоростью перехода, между двумя значениями изменения ускорения.
12. Способ по п.11, в котором используют первую и вторую скорости перехода во время рейса кабины лифта между начальным положением и назначенной остановкой.
13. Способ по п.11, в котором первая скорость перехода больше второй скорости перехода.
14. Способ по п.13, в котором первая скорость перехода соответствует скачкообразному переходу.
15. Способ по п.11, в котором, по меньшей мере, одна скорость из первой или второй скоростей перехода постоянна.
16. Способ по п.10, в котором профиль движения содержит профиль изменения ускорения, имеющий скачкообразный переход в начале и в конце рейса кабины лифта и наклонные переходы между разными значениями изменения ускорения от начала до окончания рейса.
17. Способ по п.10, в котором управляют профилем движения для его асимметрии между началом и средней точкой рейса кабины лифта.
18. Способ по п.17, в котором управляют профилем движения между средней точкой и окончанием рейса для его зеркальной симметрии участку профиля движения между началом и средней точкой рейса.
| US 4155426 А, 22.05.1979 | |||
| Устройство задания режима движения шахтной подъемной установки | 1988 |
|
SU1645236A2 |
| Способ изготовления биметаллических коллекторных пластин | 1982 |
|
SU1138868A1 |
| US 3774729 A, 27.11.1973 | |||
| СПОСОБ ПОЛУЧЕНИЯ ОКСИЭТИЛИДЕНДИФОСФОНОВОЙ КИСЛОТЫ ИЗ ФОСФОРСОДЕРЖАЩИХ ОТХОДОВ ПРОИЗВОДСТВА ХЛОРАНГИДРИДОВ ВЫСШИХ ЖИРНЫХ КИСЛОТ | 2000 |
|
RU2173321C1 |

