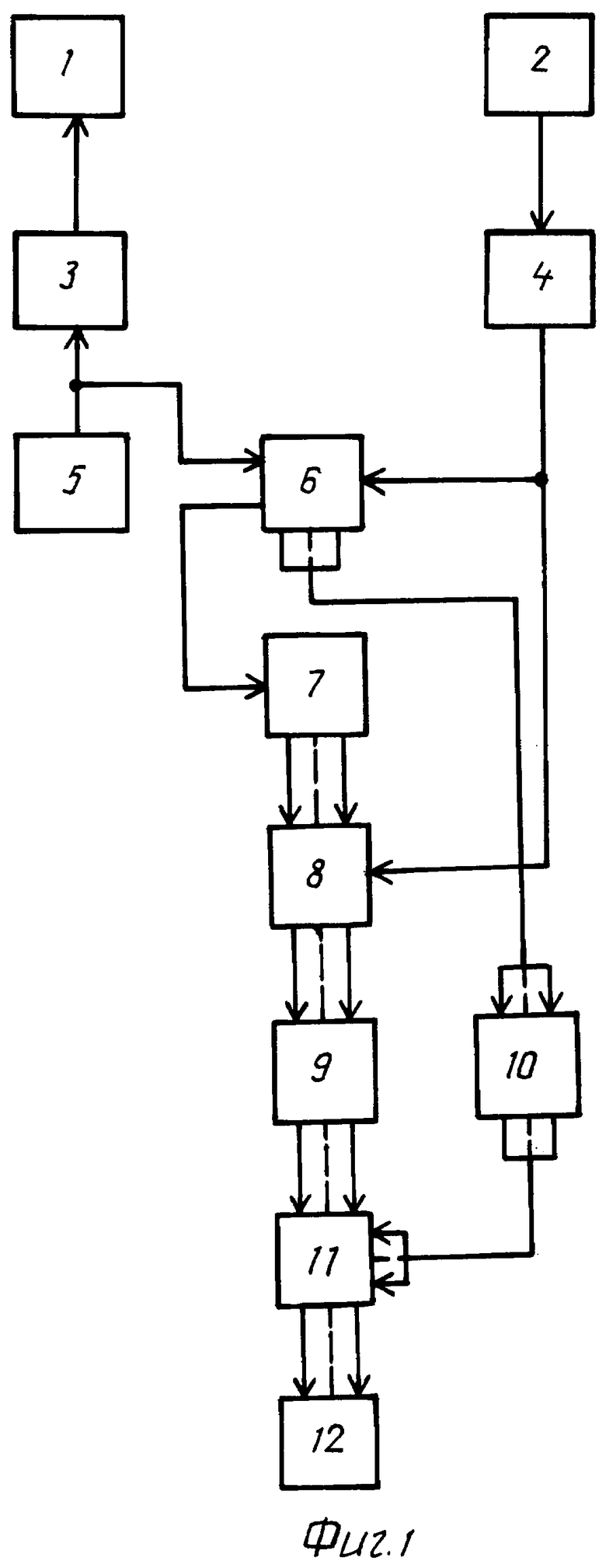
Изобретение относится к области локационной техники и может быть использовано в летательных аппаратах, определяющих высоту до водной или земной поверхности. Известен высотомер, изложенный в книге Давыдов и др. «Эксплуатация радиолокационного оборудования» 1990 г., стр.32-35. В его состав входит передающая и приемная антенны, узлы, обеспечивающие излучение частотно модулированного непрерывного сигнала и прием его отражения от водной поверхности или земли. Высота определяется как разность частот излучаемой и отраженной. Однако точность определения высоты не всегда достаточна. Известен высотомер, изложенный в книге «Радиотехнические системы» М., 1990 г., Ю.М. Казаринов, стр.355-356. В нем используются передающая и приемная антенны, которые имеют поле зрения, обеспечивающее определение высоты, независимо от крена, имеющегося у воздушных объектов. Синхронизатор выдает команду импульсному передатчику на излучение зондирующего импульса, который может быть и наносекундной длительности. Частота излучения импульсов должна обеспечить прием отраженных сигналов. При этом момент прихода переднего фронта отраженных сигналов характеризует высоту аппарата. В приемнике осуществляется преобразование отраженной электромагнитной или световой энергии в электрические сигналы. Высота может быть определена в преобразователе дальности по временному рассогласованию между синхроимпульсом и передним фронтом отраженного сигнала. Значение высоты отображается на индикаторе. Однако точность определения высоты может быть недостаточной без использования усложненных узлов. С помощью предлагаемого устройства увеличивается точность определения высоты без использования сложных узлов. Достигается это введением блока последовательных линий задержек, блока параллельных элементов совпадения, постоянного запоминающего устройства блока параллельных линий задержек и сумматора, при этом выход преобразователя дальности соединен с входом блока последовательных линии задержек, имеющего группу выходов, соединенную с группой входов блока параллельных элементов совпадения, вход которого соединен с выходом приемника, а группа выходов соединена через постоянное запоминающее устройство, с первой группой входов сумматора, имеющего вторую группу входов, соединенную через блок параллельных линий задержек с группой выходов преобразователя дальности и группу выходов, соединяющую с группой входов индикатора. На фиг.1 и в тексте приняты следующие обозначения:
1 - передающая антенна
2 - приемная антенна
3 - импульсный передатчик
4 - приемник
5 - синхронизатор
6 - преобразователь дальности
7 - блок последовательных линий задержек
8 - блок параллельных элементов совпадения
9 - постоянное запоминающее устройство
10 - блок параллельных линий задержек
11 - сумматор
12 - индикатор, при этом выход синхронизатора 5 соединен через импульсный передатчик 3 с входом передающей антенны 1, а также соединен с первым входом преобразователя дальности 6, имеющим второй вход, соединенный через приемник 4 с выходом приемной антенны 2 и соединенный с входом блока параллельных элементов совпадения 8, имеющий группу выходов и группу входов, соответственно соединенные через постоянное запоминающее устройство 9 с первой группой входов сумматора 11, И с группой выходов блока последовательных линий задержек 7, имеющий вход, соединенный с выходом преобразователя дальности 6, группа выходов которого соединена через блок параллельных линий задержек 10 со второй группой входов сумматора 11, имеющего группу выходов, соединенную с группой входов индикатора 12.
Работа устройства осуществляется следующим образом:
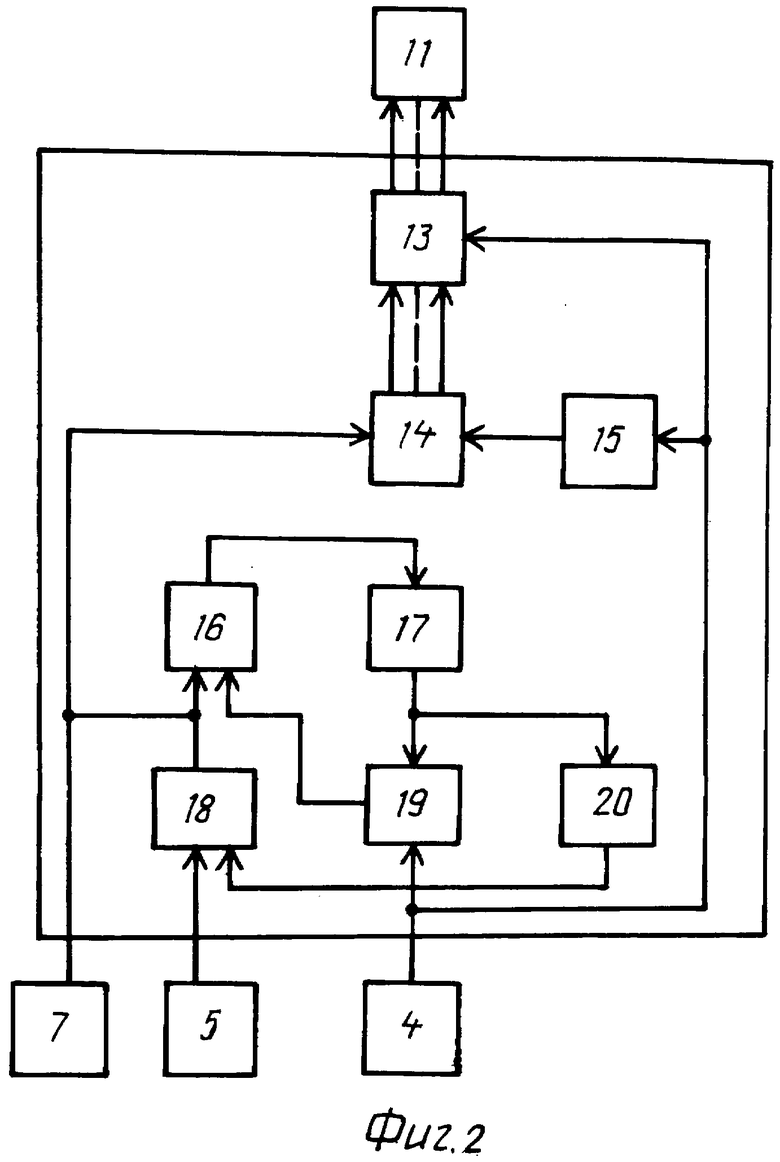
Синхронизатор 5 выдает команду импульсному передатчику 3 на излучение зондирующего импульса, который может быть и наносекундной длительности. Частота излучения импульсов обеспечивает прием отраженных сигналов. При этом передний фронт отраженных сигналов, используется для определения высоты, независимо от крена аппарата. Это обеспечивается подбором определенной ширины луча. Энергия с выхода импульсного передатчика 3 поступает в передающую антенну 1, с помощью которой энергия излучается в направлении водной поверхности или суши. У космических аппаратов луч может быть узконаправленным. Отраженная энергия поступает в приемную антенну 2, имеющую поле зрения не менее чем у антенны 1. С выхода антенны 2 энергия поступает в приемник 4, где преобразуется в электрические сигналы. Предварительное значение высоты определяется в преобразователе дальности 6 по временному рассогласованию между синхроимпульсом и передним фронтом сигнала с приемника. Пример конкретного исполнения преобразователя дальности представлен в книге Васин В.В., Степанов Б.М. «Справочник-задачник по радиолокации», М., 1977, стр.214, фиг.9.7. На фиг.2 показан вариант исполнения функциональной схемы преобразователя. В ее состав входит блок элементов совпадения 13, счетчик 14, линия задержки 15, триггер 16, линия задержки 17, элементы или 18, или 19, и линия задержки 20. С выхода синхронизатора 5 синхропульс поступает через первый вход преобразователь 6, через элемент или 18 на первый вход триггера 16, устанавливая его в единичное состояние и на вход счетчика 14, а также на вход блока последовательных линий задержек 7. Сигнал с выхода триггера поступает через линию задержки 17, через элемент или 19, на второй вход триггера 16, перебрасывая его в нулевое состояние. Так же сигнал проходит с выхода линии задержки 17 через линию задержки 20, через элемент или 18, снова на установку триггера 16 в единичное состояние и поступает на вход счетчика 14, а также на вход блока последовательных линий задержек 7. Таким образом, формируются тактовые импульсы с выхода элемента или 18.
Счетчик считает до тех пор, пока не поступит с приемника сигнал, разрешающий прохождение информации со счетчика 14 блоку элементов совпадения 13 на группу входов блока параллельных линий задержек 10, имеющего группу выходов, соединенную со второй группой входов сумматора 11. Сигнал с приемника 4 также проходит через линию задержки 15, устанавливая счетчик 14 в исходное состояние. На первую группу входов сумматора 11 поступает код, уточняющий значения высоты. Уточнение осуществляется благодаря также введению блока последовательных линий задержек 7, блока параллельных элементов совпадения 8 и постоянного запоминающего устройства 9. При этом тактовые импульсы с преобразователя 6 проходит через ряд последовательно соединенных линий задержек блока 7. Выход каждой линии задержки соединен с входом соответствующего элемента совпадения блока параллельных элементов совпадения 8. На другой вход каждого элемента поступает сигнал с приемника 4. В момент прихода переднего фронта сигнала с приемника сработает соответствующая схема совпадения. Следовательно, на группе выходов блока 8 будет иметь место десятичный код, поступающий в постоянное запоминающее устройство 9, где для каждого значения этого кода зашит соответствующий двоичный код, характеризующий определенное уточняющее значение, которое поступает в сумматор 11. Время задержки блока параллельных линий задержек 10 равно времени срабатывания постоянного запоминающего устройства 9, что обеспечивает одновременность прихода кодов в сумматор в момент прихода кода с преобразователя 6.
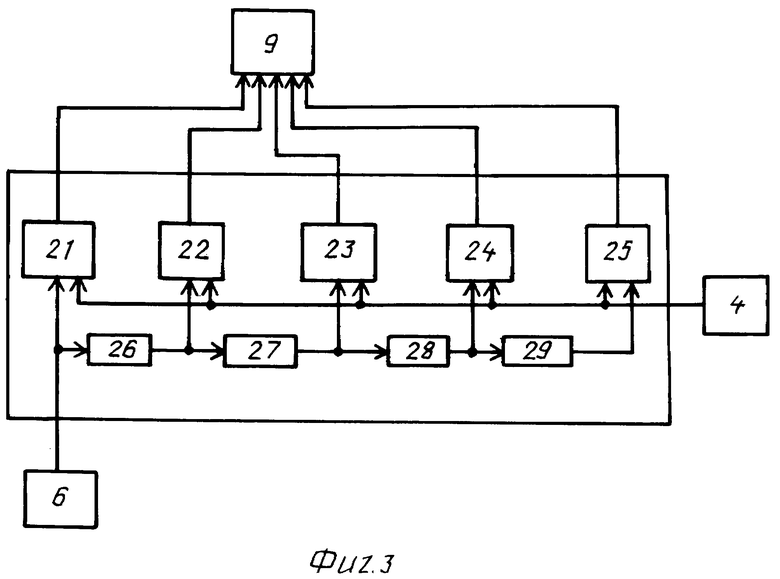
В результате суммирования код уточненной высоты поступает в индикатор 12 для отображения. На фиг.3 показаны узлы, входящие в блоки 7, 8, где приняты следующие обозначения: элементы совпадения 21-25, линии задержки 26-29.
Таким образом, точность определения высоты зависит от количества разрядов в уточняющем коде, то есть от количества линии задержек в блоке 7 и элементов совпадения в блоке 8. Предлагаемое устройство может быть использовано для определения высоты воздушных и космических объектов с необходимой точностью без усложнения аппаратуры. Оно эффективно при определении высоты низколетящих объектов. Устройство может работать и в оптическом диапазоне. Точность определения высоты может составлять 0,3 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ВОДНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2506539C1 |
| ТРЕХКООРДИНАТНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2510889C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| АККУСТИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2013 |
|
RU2525472C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ВОДНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2557331C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИОНОСФЕРЫ | 2012 |
|
RU2510772C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТ ИОНОСФЕРЫ В ЗОНЕ ОБЗОРА | 2012 |
|
RU2510882C1 |
Изобретение относится к радиолокационной технике и может быть использовано в летательных аппаратах, определяющих высоту до водной или земной поверхности. Достигаемый технический результат - увеличение точности определения высоты. Указанный результат достигается благодаря введению блока последовательных линий задержек, блока параллельных элементов совпадения, постоянного запоминающего устройства блока параллельных линий задержек и сумматора, при этом выход преобразователя дальности соединен с входом блока последовательных линий задержек, имеющего группу выходов, соединенную с группой входов блока параллельных элементов совпадения, вход которого соединен с выходом приемника, а группа выходов соединена через постоянное запоминающее устройство, с первой группой входов сумматора, имеющего вторую группу входов, соединенную через блок параллельных линий задержек с группой выходов преобразователя дальности и группу выходов, соединяющую с группой входов индикатора. 3 ил.
Высотомер, состоящий из передающей антенны с увеличенным полем зрения, приемной антенны, импульсного передатчика, приемника, синхронизатора, преобразователя дальности и индикатора, где выход синхронизатора соединен через импульсный передатчик с входом передающей антенны, а также соединен с первым входом преобразователя дальности, имеющим второй вход, соединенный через приемник с выходом приемной антенны, отличающийся тем, что вводится блок последовательных линий задержек, блок параллельных элементов совпадения, постоянное запоминающее устройство, блок параллельных линий задержек и сумматор, при этом выход преобразователя дальности соединен с входом блока последовательных линий задержек, имеющего группу выходов, соединенную через блок параллельных элементов совпадения, вход которого соединен с выходом приемника, а группа выходов соединена через постоянное запоминающее устройство с первой группой входов сумматора, имеющего вторую группу входов, соединенную через блок параллельных линий задержек с группой выходов преобразователя дальности, и группу выходов, соединяющую с группой входов индикатора.
| КАЗАРИНОВ Ю.М | |||
| Радиотехнические системы | |||
| - М., 1990, с.355-356 | |||
| ДАЛЬНОМЕР | 1994 |
|
RU2081438C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 2003 |
|
RU2234718C1 |
| Сепаратор | 1932 |
|
SU32287A1 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И БОРТОВОЙ РАДИОЛОКАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2303796C1 |
| US 5486821 A, 23.01.1996 | |||
| US 6166682 A, 26.12.2000 | |||
| US 6428171 В1, 06.08.2002 | |||
| ЕР 1782095 А2, 09.05.2007. | |||

