Изобретение относится к области радиолокации и может быть использовано в системах управления воздушным движением. Известен трехкоординатный радиолокатор, изложенный в патенте №2337377, бюл. №30, автор Часовской А.А. В нем осуществляется электрическое сканирование луча. Перемещение луча в заданном секторе обзора может осуществляться с помощью блока фазирования.
Управление блоком фазирования может проходить с помощью блока вторичной обработки, выдающим код, несущий в себе информацию о направлении скачкообразного перемещения луча. Этот код также может выполнять функции синхронизатора и поступать, например, в элемент ИЛИ, на выходе которого образуется импульсный сигнал, поступающий через линию задержки в преобразователь дальности. При этом величина линии задержки может быть равна строго определенному времени между этим сигналом и моментом излучения зондирующего импульса.
Кроме того, вышеупомянутое сканирующее устройство выдает код положения луча в зоне обзора в преобразователь положения луча в направление. Исполнение преобразователя может быть аналогично постоянному запоминающему устройству, где для каждого положения луча зашивается соответствующее направление, которое может поступать в блок вторичной обработки. Преобразователь дальности определяет временное рассогласование между моментом излучения зондирующего импульса и моментом приема отраженного сигнала в процессе сканирования. Это рассогласование также может поступать в блок вторичной обработки, который осуществляет построение траекторий движения целей. Однако время сканирования не всегда удовлетворяет предъявленным требованиям, кроме того, требуются громоздкие антенные узлы.
Известен трехкоординатный радиолокатор, изложенный в книге «Радиотехническая промышленность России», ООО ИД «Военный парад», М., 2010 г., стр.101. В нем используются те же узлы, что и в вышеупомянутом устройстве. Однако для осуществления трехкоординатного электронного сканирования требуются громоздкие антенные узлы, кроме того, время сканирования не всегда удовлетворяет предъявляемым требованиям.
С помощью предлагаемого устройства уменьшается его громоздкость без увеличения времени сканирования.
Достигается это благодаря введению узконаправленного по горизонтали электрического сканирующего устройства, узконаправленного по вертикали электрического сканирующего устройства, второго блока фазирования, второго преобразователя положения луча в направление и второго элемента ИЛИ, при этом группа выходов узконаправленного по горизонтали электрического сканирующего устройства и его вход соответственно соединены с группой входов первого преобразователя положения луча в направление и с выходом первого блока фазирования, а третья группа входов блока вторичной обработки соединена со второй группой входов первого элемента ИЛИ и с группой входов второго блока фазирования, имеющего выход, соединенный с входом узконаправленного по вертикали электрического сканирующего устройства, имеющего группу выходов и отдельный выход, соответственно соединенные через второй преобразователь положения луча в направление с третьей группой входов блока вторичной обработки и с вторым входом второго элемента ИЛИ, имеющего первый вход и выход, соответственно соединенные с выходом узконаправленного по горизонтали электрического сканирующего устройства и с вторым входом преобразователя дальности.
На фиг.1 и в тексте приняты следующие обозначения:
1 - блок фазирования,
2 - узконаправленное по горизонтали электрическое сканирующее устройство,
3 - блок фазирования,
4 - узконаправленное по вертикали электрическое сканирующее устройство,
5 - преобразователь положения луча в направление,
6 - блок вторичной обработки,
7 - преобразователь положения луча в направление,
8 - индикатор,
9 - преобразователь дальности,
10 - элемент ИЛИ,
11 - линия задержки,
12 - элемент ИЛИ,
при этом первая группа выходов блока вторичной обработки 6 соединена с группой входов блока фазирования 1 и первой группой входов элемента ИЛИ 10, имеющего выход, соединенный через линию задержки 11 с первым входом преобразователя дальности 9, группа выходов которого соединена с первой группой входов блока вторичной обработки 6, имеющего вторую группу выходов, соединенную с группой входов индикатора 8, и имеющего вторую группу входов, соединенную через преобразователь положения луча в направление 5 с группой выходов узконаправленного по горизонтали электрического сканирующего устройства 2, вход которого соединен с выходом блока фазирования 1, а третья группа выходов блока вторичной обработки соединена с второй группой входов элемента ИЛИ 10 и с группой входов блока фазирования 3, имеющего выход, соединенный с входом узконаправленного по вертикали электрического сканирующего устройства 4, имеющего группу выходов и отдельный выход, соответственно соединенные через преобразователь положения луча в направление 7 с третьей группой входов блока вторичной обработки 6 и с вторым входом второго элемента ИЛИ, имеющего первый вход и выход, соответственно соединенные с выходом узконаправленного по горизонтали электрического сканирующего устройства 2 и с вторым входом преобразователя дальности.
Устройство работает следующим образом.
С помощью узконаправленного по горизонтали электрического сканирующего устройства 2 и узконаправленного по вертикали электрического сканирующего устройства 4 осуществляются следующие друг за другом скачкообразные перемещения луча по вертикали и по горизонтали в секторной зоне обзора. При этом длина лучей может составлять, например, 60 градусов, а ширина 2 градуса, и они характеризуют поля зрения этих устройств.
На фиг.2 показано поле зрения 14 устройства 2 и поле зрения 15 устройства 4, а также угловая координата 13 выделенного объекта, имеющего одинаковые дальности при вертикальном и горизонтальном обзоре заданного сектора. На основании чего в блоке вторичной обработки делается вывод о принадлежности к одной и той же цели этих дальностей. Порядок обзора осуществляется следующим образом. Сначала происходит скачкообразное перемещение поля зрения 14, а затем скачкообразные перемещения поля зрения 15. Электрические перемещения луча по вертикали осуществляются с помощью блока фазирования 1, а по горизонтали с помощью блока фазирования 4. Через строго определенное время после перемещения луча излучается зондирующий импульс.
При этом блок вторичной обработки 6 выдает команды блокам фазирования 1 и 3 на перемещения лучей. Устройства 2 и 4 выдают коды положения лучей в зоне обзора соответственно в преобразователи положения луча в направление 5 и 7, выдающие коды угломестного и азимутального направлений соответственно на вторую и третью группы входов блока вторичной обработки 6. Исполнение преобразователей 5 и 7 может быть аналогично постоянным запоминающим устройствам, где для каждого положения луча зашивается соответствующее направление.
Выдавая команду блоку фазирования 1 и блоку фазирования 3 на последовательное перемещение полей зрения по вертикали и горизонтали, блок вторичной обработки 6 выдает эти коды в элемент ИЛИ 10 с первой и третьей своих групп выходов. На выходе элемента ИЛИ 10 образуется импульсный сигнал, следующий через линию задержки 11 на первый вход преобразователя дальности 9. При этом величина линии задержки равна времени между моментом выдачи вышеупомянутого сигнала с элемента ИЛИ 10 и моментом излучения зондирующего импульса устройствами 2 или 4. Преобразователь дальности 9 определяет временное рассогласование между моментом излучения зондирующего импульса с устройств 2 или 4 и моментом прихода отраженного сигнала. При этом с выходов устройств 2 или 4 выдаются электрические сигналы на первый и второй входы элемента ИЛИ 12, а с его выхода сигнал поступает на второй вход преобразователя дальности 9, с группы выходов которого значение дальности поступает на первую группу входов блока вторичной обработки 6. Однако возможен вариант, когда устройство 2 используется только как активное и передающее, а устройство 4 только как пассивное и приемное или наоборот. При этом после перемещения поля зрения активного устройства в зоне обзора, пассивное устройство перемещается только на один скачок и находится в этом положении в период времени скачкообразного перемещения луча этого активного устройства в зоне обзора. При этом используется только один передатчик и приемник. Это еще более уменьшает громоздкость антенны. Однако время обзора увеличивается. В блоке вторичной обработки 6 методом прямоугольного треугольника осуществляется определение высоты и построение траектории движения целей. При этом информация о трех координатах объекта поступает со второй группы выходов блока вторичной обработки 6 на группу входов индикатора 8 для отображения. Необходимо отметить, что если две цели имеют одинаковые дальности, находясь в одном поле зрения 14 или 15, то эти неоднозначности устраняются в процессе вторичной обработки. Блок 6, также анализируя равенство дальностей, может осуществлять управление многоцелевым слежением за целями, выдавая последовательно команды блокам фазирования 1 и 3 на ориентацию горизонтальных и вертикальных полей зрения, соответствующие местам пересечения этих полей. При этом время, затраченное на многоцелевое слежение, будет многократно меньше, чем время вышеупомянутого последовательного обзора. Кроме того, создается возможность уменьшить величины скачкообразных перемещений по углам, что увеличивает точностные характеристики по направлению.
Пример конкретного исполнения блока вторичной обработки, который может осуществлять построение траектории движения объектов и управление фазированием, представлен в книге «Радиотехнические системы», Пестряков В.П. и др., 1985 г., стр.219. Пример конкретного исполнения преобразователя дальности представлен в книге «Справочник-задачник по радиолокации», Васин В.В., Степанов Б.М., М., 1977 г., стр.214, фиг 9.7.
Приведем примеры конкретного применения.
Пусть в поле зрения (60×60 градусов) осуществляется поочередное горизонтальное и вертикальное перемещение лучей, имеющих длину 60 градусов и ширину 2 градуса. Величина одного скачка равна 1 градусу. Тогда при максимальной дальности 500 км время одного обзора составит 800 мс.
Пусть по горизонтали осуществляется активное сканирование, а по вертикали - пассивное. Тогда при максимальной дальности обнаружения 100 км время одного обзора составит 9 сек.
Предлагаемое устройство можно использовать в системах управления полетами за воздушными и космическими объектами. При этом благодаря уменьшению громоздкости и времени сканирования улучшаются тактико-технические характеристики изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| ВЫСОТОМЕР | 2012 |
|
RU2501036C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| АККУСТИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2013 |
|
RU2525472C1 |
| РАДИОЛОКАТОР | 2013 |
|
RU2533349C1 |
| УСТРОЙСТВО ПОИСКА ОБЛАКОВ И МОЛНИЕВЫХ РАЗРЯДОВ | 2014 |
|
RU2568653C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| ОПТИКО-ЛОКАЦИОННОЕ УСТРОЙСТВО | 2013 |
|
RU2518533C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ВОДНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2506539C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО ИМПУЛЬСНОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505837C1 |
Изобретение относится к области радиолокации и может быть использовано в системах управления воздушным движением. Достигаемый технический результат - уменьшение габаритов без увеличения времени сканирования. Указанный результат достигается за счет того, что трехкоординатный радиолокатор содержит два блока фазирования, два преобразователя положения луча в направление, линию задержки, два элемента ИЛИ, блок вторичной обработки, индикатор, узконаправленное по горизонтали электрическое сканирующее устройство, узконаправленное по вертикали электрическое сканирующее устройство, определенным образом соединенные между собой. 2 ил.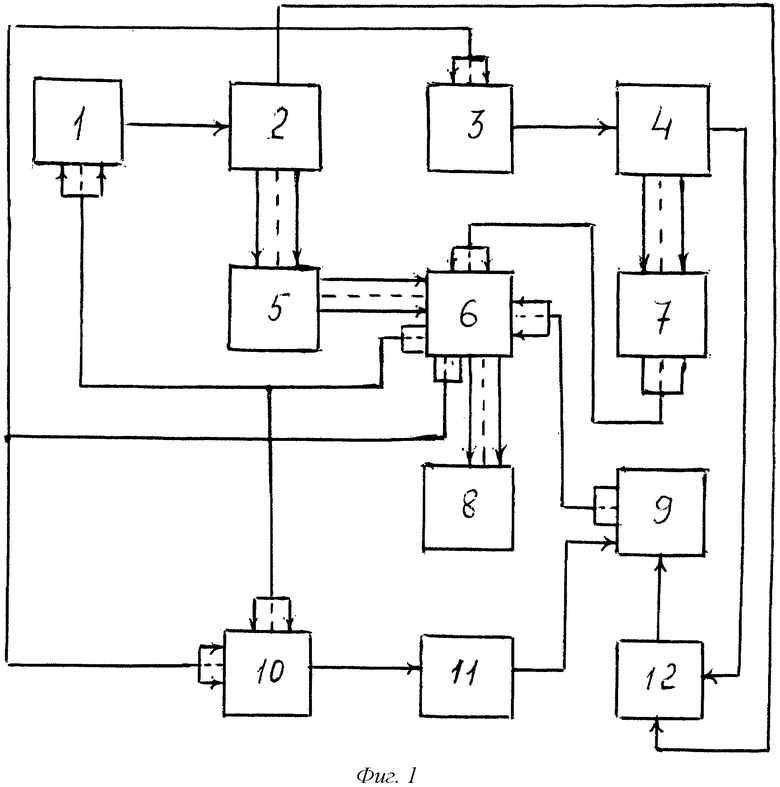
Трехкоординатный радиолокатор, состоящий из блока фазирования преобразователя положения луча в направление, элемента ИЛИ, линии задержки, блока вторичной обработки и индикатора, где первая группа выходов блока вторичной обработки соединена с группами входов блока фазирования и элемента ИЛИ, имеющего выход, соединенный через линию задержки с первым входом преобразователя дальности, группа выходов которого соединена с первой группой входов блока вторичной обработки, имеющего вторую группу выходов, соединенную с группой входов индикатора, и имеющего вторую группу входов, соединенную с группой выходов преобразователя положения луча в направление, отличающийся тем, что вводятся узконаправленное по горизонтали электрическое сканирующее устройство, узконаправленное по вертикали электрическое сканирующее устройство, второй блок фазирования, второй преобразователь положения луча в направление и второй элемент ИЛИ, при этом группа выходов узконаправленного по горизонтали электрического сканирующего устройства и его вход соответственно соединены с группой входов первого преобразователя положения луча в направление и с выходом первого блока фазирования, а третья группа выходов блока вторичной обработки соединена со второй группой входов первого элемента ИЛИ и с группой входов второго блока фазирования, имеющего выход, соединенный с входом узконаправленного по вертикали электрического сканирующего устройства, имеющего группу выходов и отдельный выход, соответственно соединенные через второй преобразователь положения луча в направление с третьей группой входов блока вторичной обработки и с вторым входом второго элемента ИЛИ, имеющего первый вход и выход, соответственно соединенные с выходом узконаправленного по горизонтали электрического сканирующего устройства и с вторым входом преобразователя дальности.
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| Способ изготовления сосудов из регенерированной целлюлозы | 1952 |
|
SU96664A1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| Устройство для стереограмметрической съемки | 1936 |
|
SU49285A1 |
| JP 2008309533 A, 25.12.2008 | |||
| US 7132974 B1, 07.11.2006 | |||
| US 5341141 A, 23.08.1994 | |||
| DE 4123898 A1, 21.01.1993. | |||

