Изобретение относится к области радиолокации и может быть использовано в системах определения уровней водоемов. Известно устройство определения дальности до водной поверхности, представленное как «высотомер» и описанное в книге «Радиотехнические системы», Ю.М.Казаринов, 1990 г., М., Высшая школа, стр.355. В нем осуществляется излучение импульсной электромагнитной энергии в направлении водной поверхности и прием отраженного от него сигнала. Однако точность определения дальности не всегда достаточна.
Известно устройство определения дальности до водной поверхности, изложенное в вышеупомянутом источнике на стр.345-353, рис.16.1, которое может выполнять функции высотомера, где могут быть использованы и неподвижные передающая и приемная антенны, повернутые вниз и установленные на определенном расстоянии от уровня водной поверхности. С помощью частотного модулятора осуществляется изменение выдаваемой генератором высокой частоты в неподвижную повернутую вниз передающую антенну. Последняя излучает электромагнитную энергию, которая отражается от водной поверхности и поступает в жестко связанную с передающей неподвижную приемную антенну. Электромагнитная энергия преобразуется в электрические сигналы в приемнике, в состав которого входят усилитель и детектор. В приемник также поступает изменяющаяся частота с генератора высокой частоты. Так как частота за время прихода отраженного сигнала изменится пропорционально расстоянию до водной поверхности, то частота на выходе приемника равна разности частот с генератора и отраженной частоты. В результате на выходе приемника после детектирования возникают биения, которые далее усиливаются в усилителе напряжений биений. Так как дальности до горизонтального участка водной поверхности, облученного диаграммой направленности передающей антенны, будут отличаться друг от друга, то для выделения наименьшей дальности, равной расстоянию по центральной оси от передающей антенны до водной поверхности, проводится с помощью параллельного анализатора спектра биений анализ частот биений. Последний выделяет ожидаемые спектры биений, соответствующие расстояниям до водной поверхности, и выдает их в блок определения минимального спектра биений. Выделенный минимальный спектр далее с выхода этого блока поступает в блок определения минимальной частоты, с выхода которого параллельный код, характеризующий дальность, поступает в индикатор для отображения. Однако при наличии волнений точность определения дальности ухудшается.
С помощью предлагаемого устройства увеличивается точность определения дальности до водной поверхности при наличии волнения. Достигается это введением двух постоянных запоминающих устройств, блока автосопровождения по дальности, элемента И-ИЛИ, блока определения временного рассогласования между двумя сигналами, при этом группа выходов блока определения минимальной частоты, соединена через первое постоянное запоминающее устройство, через блок автосопровождения по дальности с первой группой входов сумматора, имеющего группу выходов и вторую группу входов, соответственно соединенные с группой входов индикатора и через второе постоянное запоминающее устройство - с группой выходов блока определения временного рассогласования между двумя сигналами, вход которого соединен с выходом элемента И-ИЛИ, имеющего группу входов, соединенную с группой выходов блока автосопровождения по дальности и вход, соединенный с выходом этого блока.
На фиг.1 и в тексте приняты следующие обозначения:
1 - частотный модулятор,
2 - генератор высокой частоты,
3 - неподвижная передающая антенна, повернутая вниз,
4 - параллельный анализатор спектра биений,
5 - усилитель напряжения биений,
6 - приемник,
7 - неподвижная приемная антенна,
8 - блок определения минимального спектра биений,
9 - блок определения минимальной частоты,
10 - постоянное запоминающее устройство,
11 - элемент И-ИЛИ,
12 - блок автосопровождения по дальности,
13 - блок определения временного рассогласования между двумя сигналами,
14 - сумматор,
15 - постоянное запоминающее устройство,
16 - индикатор,
при этом выход частотного модулятора 1 соединен с входом генератора высокой частоты 2, имеющего первый и второй выходы, соответственно соединенные с входом неподвижной передающей антенны, повернутой вниз 3, и с первым входом приемника 6, имеющего второй вход и выход, соответственно соединенные с выходом жестко связанной с передающей антенной неподвижной приемной антенны 7 и через усилитель напряжения биений 5 - с выходом параллельного анализатора спектра биений 4, группа выходов которого соединена с группой входов блока определения минимального спектра биений 8, имеющего выход, соединенный с входом блока определения минимальной частоты 9, группа выходов которого соединена через постоянное запоминающее устройство 10, через блок автосопровождения по дальности 12 с первой группой входов сумматора 14, имеющего группу выходов и вторую группу входов, соответственно соединенные с группой входов индикатора 16 и через постоянное запоминающее устройство 15 - с группой выходов блока определения временного рассогласования между двумя сигналами 13, вход которого соединен с выходом элемента И-ИЛИ 11, имеющего группу входов, соединенную с группой выходов блока автосопровождения по дальности 12 и вход, соединенный с выходом этого блока.
Устройство работает следующим образом
С помощью частотного модулятора 1 осуществляется изменение частоты, выдаваемой генератором высокой частоты 2 в неподвижную передающую антенну, повернутую вниз 3. Последняя излучает электромагнитную энергию, которая отражается от водной поверхности и поступает в жестко связанную с передающей неподвижную приемную антенну 7. Высота размещения антенн может составлять, например, 40 м. Отраженная электромагнитная энергия преобразуется в электрический сигнал в приемнике 6, в состав которого входят усилитель и детектор. В приемник также поступает изменяющаяся частота с генератора 2. Так как частота за время прихода отраженного сигнала изменяется пропорционально расстоянию до водной поверхности, то частота на выходе приемника 6 равна разности частот с генератора 2 и отраженной частоты. В результате на выходе приемника после детектирования возникают биения, которые далее усиливаются в усилителе напряжений биений 5.
Так как дальности до горизонтального участка водной поверхности, облученной диаграммой направленности передающей антенны 3, будут отличаться друг от друга, то для выделения наименьшей дальности, равной расстоянию по центральной оси от передающей антенны до водной поверхности, проводится анализ с помощью параллельного анализатора спектра биений 4, настроенного на ожидаемые частоты этих биений. Пример конкретного исполнения анализатора спектра биений 4 представлен в вышеупомянутой книге «Радиотехнические системы» на стр.353. Далее частоты биений поступают с группы выходов анализатора 4 на группу входов блока определения минимального спектра биений 8, представляющего собой блок вторичной обработки, выделяющий из определенного количества узлов один узел, в частности имеющий минимальную частоту биений в течение заданного времени. Пример конкретного исполнения блока вторичной обработки представлен, например, в книге «Радиотехнические системы», Пестряков В.П. и др., 1985 г., стр.219. Частота биений определяется в блоке определения минимальной частоты 9, вход которого соединен с выходом блока 8, и эта частота в виде параллельного кода поступает через постоянное запоминающее устройство 10, через блок автосопровождения по дальности 12 на первую группу входов сумматора 14. В постоянном запоминающем устройстве 10 каждому коду, характеризующему минимальную частоту биений, соответствует определенная дальность. Блок автосопровождения 12 выделяет схожие минимальные дальности, в том числе и до гребней волны, следующие друг за другом. Время определения дальности зависит от частоты следования волны, имеющей максимальную высоту, гребень которой пересекает центральная ось передающей антенны, повернутой вниз 3. Выделенные минимальные дальности до гребня в виде кода с группы выходов блока 12 поступают на группу входа элемента И-ИЛИ 11 при наличии разрешения с этого блока. Если гребень блоком 12 не выделен, что может наблюдаться при отсутствии волны, то такое разрешение не поступает, и информация о дальности проходит через сумматор 14 без сложения и отображается на индикаторе 16. Функции блока автосопровождения по дальности также может выполнять вышеупомянутый блок вторичной обработки. С выхода элемента И-ИЛИ 11 сигнал о наличии минимальной дальности поступает в блок определения временного рассогласования между двумя сигналами 13. Пример конкретного исполнения этого блока представлен в книге «Справочник-задачник по радиолокации», Васин В.В., Степанов Б.М., М., 1977 г., стр.214, фиг.9.7.
Чем реже следуют сигналы от элемента И-ИЛИ 11, тем выше волна гребней. Следовательно, для определения дальности до уровня водной поверхности, которое имело бы место, если бы волнения не было, к вышеупомянутой минимальной дальности необходимо прибавить значение, величина которого зависит от временного рассогласования, поступающего с группы выходов блока 13 на группу входов постоянного запоминающего устройства 15, где для каждого значения этого рассогласования зашивается определенное значение приращения дальности, которое нужно прибавить к минимальной дальности, что и осуществляется в сумматоре 14, куда на вторую группу входов поступает код с постоянного запоминающего устройства 15. Необходимо отметить, что для разных водоемов одному и тому же приращению дальности будут соответствовать разные временные рассогласования между гребнями волн, пересекаемые центральной осью антенны 3. Поэтому перед началом работы необходимо установить в постоянном запоминающем устройстве 15 значения приращений дальности.
В результате уточненная дальность с группы выходов сумматора 14 поступает на группу входов индикатора 16 для отображения. Возможен вариант исполнения без узлов 11, 13. Для этого заранее необходимо знать высоту волн. При этом осуществляется выдача с постоянного запоминающего устройства 15 кода приращения дальности, соответствующего высоте волн. Но так как высота может периодически меняться с течением времени, то и точность определения дальности будет ниже.
Время определения дальности при наличии волн может составить несколько секунд, а при отсутствии волн - долю секунды.
Предлагаемое устройство можно использовать для определения уровня поверхности воды, например, в шлюзах, дамбах, бассейнах и при приливах и отливах. Устройство также можно использовать для определения толщины льда на разных участках акватории. Точность определения дальности зависит от настройки анализатора и может составлять 0,5-5 см.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОТОМЕР | 2012 |
|
RU2501036C1 |
| РАДИОЛОКАТОР | 2013 |
|
RU2533349C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ВОДНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2557331C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| УСТРОЙСТВО ПОИСКА ОБЛАКОВ И МОЛНИЕВЫХ РАЗРЯДОВ | 2014 |
|
RU2568653C1 |
| ТРЕХКООРДИНАТНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2510889C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| АККУСТИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2013 |
|
RU2525472C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| АНТЕННОЕ УСТРОЙСТВО | 2013 |
|
RU2509397C1 |
Изобретение относится к области радиолокации и может быть использовано в системах определения уровня водоемов. Техническим результатом заявленного устройства является повышение точности определения дальности до водной поверхности при наличии волнения. Технический результат достигается благодаря введению двух постоянных запоминающих устройств, блока автосопровождения по дальности, элемента и-или, блока определения временного рассогласования между двумя сигналами, при этом группа выходов блока определения минимальной частоты соединена через первое постоянное запоминающее устройство, через блок автосопровождения по дальности с первой группой входов сумматора, имеющего группу выходов и вторую группу входов, соответственно соединенные с группой входов индикатора и через второе постоянное запоминающее устройство - с группой выходов блока определения временного рассогласования между двумя сигналами, вход которого соединен с выходом элемента и-или, имеющего группу входов, соединенную с группой выходов блока автосопровождения по дальности, и вход, соединенный с выходом этого блока. 1 ил.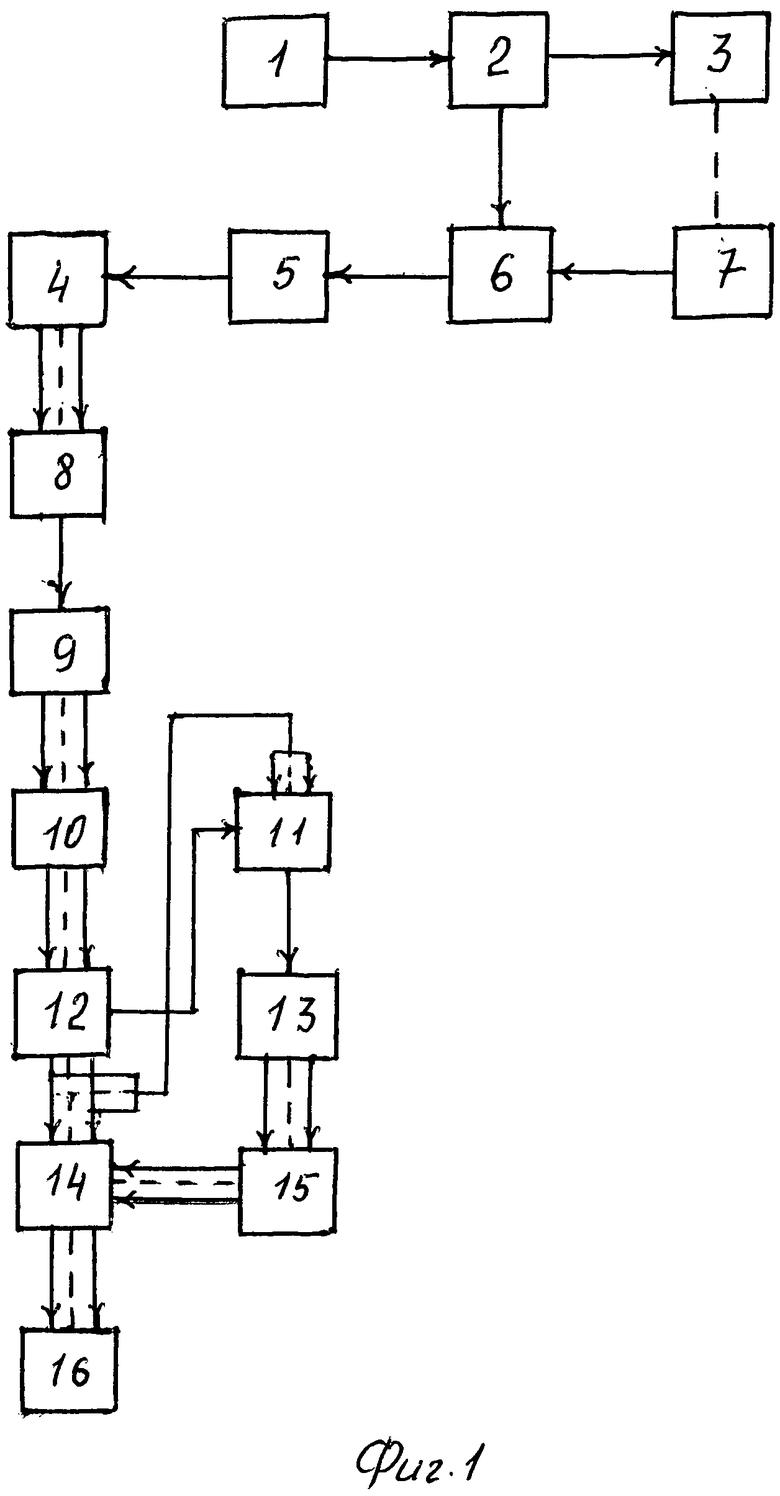
Устройство определения дальности до водной поверхности, состоящее из частного модулятора, генератора высокой частоты, неподвижной передающей антенны, повернутой вниз, параллельного анализатора спектра биений, усилителя напряжений биений, приемника, неподвижной приемной антенны, блока определения минимального спектра биений, блока определения минимальной частоты, где выход частотного модулятора соединен с входом генератора высокой частоты, имеющего первый и второй выходы, соответственно соединенные с входом неподвижной передающей антенны, повернутой вниз, и с первым входом приемника, имеющего второй вход и выход, соответственно соединенные с выходом неподвижной приемной антенны и через усилитель напряжения биения - с входом параллельного анализатора спектра биений, группа выходов которого соединена с группой входов блока определения минимального спектра биений, имеющего выход, соединенный с входом блока определения минимальной частоты, отличающееся тем, что вводятся два постоянных запоминающих устройства, блок автосопровождения по дальности, элемент и-или и блок определения временного рассогласования между двумя сигналами, при этом группа выходов блока определения минимальной частоты.5 соединена через первое постоянное запоминающее устройство, через блок автосопровождения по дальности с первой группой входов сумматора, имеющего группу выходов и вторую группу входов, соответственно соединенные с группой входов индикатора и через второе постоянное запоминающее устройство - с группой выходов блока определения временного рассогласования между двумя сигналами, вход которого соединен с выходом элемента и-или имеющего группу входов, соединенную с группой выходов блока автосопровождения по дальности, и вход, соединенный с выходом этого блока.
| US 5546088 A, 13.08.1996 | |||
| Сепаратор | 1932 |
|
SU32287A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2000 |
|
RU2208813C2 |
| 0 |
|
RU2237265C | |
| US 6980153 B2, 27.12.2005. | |||

