Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу анализа остатка для обнаружения системных ошибок в поведении системы воздушного судна.
Техническая область изобретения относится к анализу генерированного остатка для обнаружения системных ошибок, в частности, ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении какой-либо системы воздушного судна, например, электрогидравлической системы рулевого управления.
Уровень техники
Если генерированный остаток превышает предварительно установленное пороговое или предельное значение, то это означает, что в поведении системы обнаружена ошибка. Такие ошибки в поведении системы проявляются в виде ошибок, связанных с переходными процессами, дрейфом или колебаниями, когда поведение системы, зависит от входных/выходных параметров.
При этом постоянно возрастающая сложность систем управления воздушным судном, в частности, цифровых систем управления воздушным судном, которые с максимально возможной избыточностью обеспечивают прежде всего улучшенные летные качества, а также выполнение множества функций безопасности и комфорта, влечет за собой все более широкое появление частично новых сценариев возникновения ошибок. К этому относится, в частности, почти не демпфируемые колебания подвижных плоскостей. Особое значение при этом имеют причины, связанные с OFC (Oscillatory Failure Case, неисправность, вызванная возникновением колебаний), которые появляются в результате ошибки в самой системе позиционирования или распространяются из компьютерной системы управления полетом или из сенсорной системы определения собственного аэродинамического движения в контурах системы управления приводным механизмом соответствующей системы позиционирования.
При этом множество возможных сценариев OFC включает ошибки компонентов обработки данных и обработки сигналов, ошибки программного обеспечения, механические дефекты, например, в блоке гидроусилителя, или отказы отдельных электронных модулей в интегральных схемах нижнего уровня интеграции, например, в преобразователе "напряжение - ток".
Другие сценарии появления ошибок могут возникать в результате взаимодействия отдельных компонентов контура системы управления приводным механизмом или цифровой системы управления полетом.
Для обнаружения таких системных ошибок в рамках диагностики, основанной на применении модели, требуется генерирование некоторого остатка с целью идентификации отклонения реального поведения системы, обусловленного ошибкой, от номинального, безошибочного поведения системы. Для этого публикация US 2007/0124038 А1 предлагает решение с применением параллельной модели для определения положения поршня системы рулевого управления воздушного судна, которое с учетом кинематической связи соответствует положению подвижной плоскости.
Для определения позиции поршня реальной, электрогидравлической системы рулевого управления предусмотрено построение детализированной нелинейной или упрощенной линейной параллельной модели, которая показана на фиг.2 US 2007/0124038 А1. При этом блок, обозначенный на фиг.2 ссылочным номером 19, представляет собой параллельную модель, которая охватывает детализированную нелинейную схему реальной динамики системы или упрощенное линейное описание. В качестве единственного входного сигнала для параллельной модели 19 предусмотрено изменяющееся во времени заданное управляющее воздействие - обозначенное ссылочным номером 20 - для контура системы управления приводным механизмом, которое сохраняется в запоминающем устройстве компьютерной системой управления полетом. Единственный выходной сигнал параллельной модели 19 обозначен ссылочным номером 29 и описывает полученную позицию приводного элемента поршня, которая изменяется во времени.
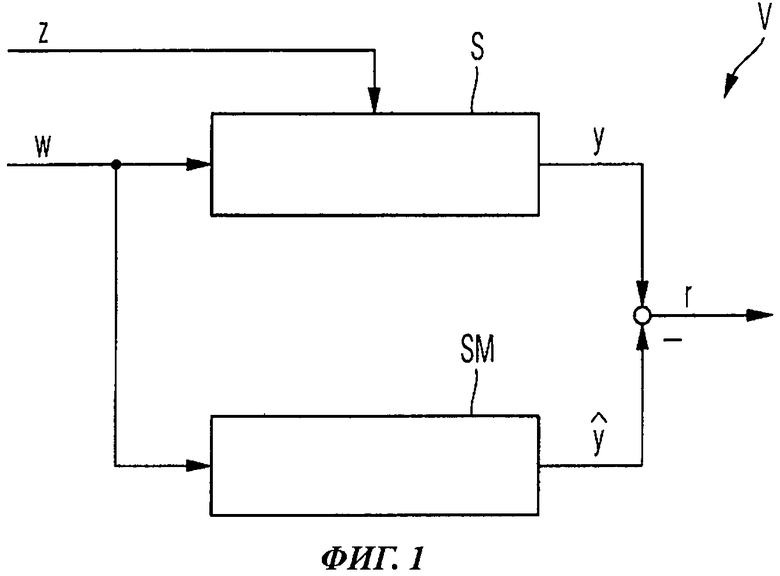
В этой связи на фиг.1 данного описания показана упрощенная блок-схема традиционного устройства V для генерирования остатка r.
При этом традиционное устройство V с фиг.1 соответствует обобщенному изображению на фиг.4 US 2007/0124038 А1, для того, чтобы лучше представить недостатки известного уровня техники.
На фиг.1 ссылочным знаком z обозначена величина помех, которая отображает внешние помехи в системе S.
Система S в качестве входного параметра имеет величину w управляющего воздействия, а на выходе представляет выходной параметр у системы. Система S представляет собой, например, реальную электрогидравлическую систему рулевого управления, а выходной параметр у системы соответствует измеренному перемещению приводного элемента поршня системы рулевого управления. Для получения определенного значения выходного параметра у системы параллельно системе S расположена модель SM системы.
Ключевым моментом способа оценки, описанного в US 2007/0124038 А1, по существу, является параллельная модель системы или модель процесса, которая в виде математического описания оптимально аппроксимирует исходные значения процесса или системы и их параметризацию. Единственным входным сигналом модели SM системы является сигнал, идентичный входному сигналу системы S, который представляет собой величину управляющего воздействия или заданное значение w управляющего воздействия. В соответствии с выбранными начальными значениями и параметризированной динамикой системы определенной модели системы определяется оценочный выходной параметр 
При применении решения, схематически показанного на фиг.1 и известного из US 2007/0124038 А1, к конкретной задаче обнаружения ошибок, связанных с переходными процессами, дрейфом или колебаниями, электрогидравлической системы рулевого управления могут возникнуть следующие проблемы: не удается сделать удовлетворительный выбор надежного и вместе с тем высокочувствительного порогового значения обнаружения для остатка r, поскольку могут возникать внешние помехи, обозначенные ссылочным знаком z, которые действуют на систему S, однако, не отображаются моделью SM системы. Эти внешние помехи возникают в электрогидравлической системе рулевого управления, в частности, из-за аэродинамических сил, которые во время полета действуют на приводную подвижную плоскость и создают механическую нагрузку для приводной системы, например, вследствие нестационарных потоков, которые возникают в результате таких единовременных явлений, как порыв ветра, гармонических помех вследствие периодических вихревых срывов или влияния гибкости окружающей конструкции или случайных помех, в частности, шумовых помех, по причине аэродинамического воздействия турбулентности. Еще одна причина недостаточной возможности устанавливать пороговое значение обнаружения заключается в постоянном наложении измеренного уровня шума на измерение позиции приводного элемента, которая используется в качестве выходного параметра у системы, из-за наличия сенсорных элементов в измерительных приборах, например, датчика позиции на приводном элементе штока поршня.
Кроме того, следствием высокодинамичных изменений величины w управляющего воздействия при наличии помех является очень быстрый, внезапный рост остатка r.
Процесс или система S изменяется также вследствие изменений параметров или краевых условий, например, скорости полета, высоты полета, углов атаки и рыскания, температуры, характеристик гидравлической среды приводного элемента и т.п. во время эксплуатации или полета. Эти изменения оказывают влияние на ответное поведение системы S и тем самым на собственную динамику системы S. Они не отображаются параллельной моделью SM процесса или системы.
При этом начальные значения процесса или системы S при практических применениях могут быть только аппроксимированы при помощи модели. Инициированные таким образом отклонения в реакции модели SM системы, а также влияние пренебрегаемой и неизвестной динамики в решении, известном из US 2007/0124038 А1, остаются некорректированными.
Без принятия дополнительных мер это приводит к нежелательному появлению составляющей сигнала остатка, которая существенно затрудняет очень чувствительную настройку порогового значения для обнаружения ошибок без ограничения контролируемой полосы частот.
В US 2007/0124038 А1 (фиг.2) для генерирования остатков путем получения значений разности между изменяющимися во времени величинами измеренной позиции приводного элемента 22 поршня и выходного параметра 29 параллельной модели предусмотрен блок 21 вычитания. Его выходной сигнал 24 соответствует полученному остатку. Далее ссылочным номером 23 обозначен модуль, предназначенный для анализа остатка с целью обнаружения ошибок.
Аналитический модуль 23 сравнивает остаток 24 с предварительно определенным пороговым значением и считает каждое превышение этого порогового значения. После предварительно установленного количества сосчитанных превышений предварительно установленного порогового значения констатируется случай наличия колебательной ошибки, и выходной сигнал 26 принимает положительное логическое значение для индикации этой ошибки.
Для того чтобы обеспечить определенную эффективность аналитического модуля 23, он имеет последовательное соединение с частотно-избирательным банком 27 фильтров, и подсоединенным компараторным блоком 25 для каждой отдельной полосы частот остатка 24. Частотно-избирательный банк 27 фильтров состоит из параллельно включенных попоено-пропускающих фильтров, предназначенных для спектрального разделения остатка 24 на предварительно установленные полосы частот. При этом ссылочным номером 28 обозначен вектор спектральных составляющих остатка 24 в полосах частот, установленных частотно-избирательным банком 27 фильтров.
Кроме того, компараторный блок 25 содержит определенный канал для каждой составляющей вектора 28, в котором соответствующая составляющая сравнивается с предварительно определенным пороговым значением. В каждом канале при помощи счетчика фиксируется превышение. Если количество зафиксированных превышений в канале превосходит предварительно определенный предел, констатируется случай наличия колебательной ошибки, который отображается при помощи выходного сигнала 28.
При применении этого решения, известного из US 2007/0124038 А1, к конкретной задаче обнаружения системных ошибок электрогидравлической системы рулевого управления воздушного судна могут возникнуть следующие проблемы: определение надежного и вместе с тем высокочувствительного порогового значения обнаружения для остатка не удается в достаточной степени, поэтому обеспечивается лишь ограниченная эффективность функции контроля системы рулевого управления. Причина этого заключается, в частности, в том, что высокодинамичные изменения величины управляющего воздействия или заданного значения управляющего воздействия при наличии помех постоянно обуславливают очень быстрый и внезапный рост остатка. Эти изменения могут возникать, в частности, во время полета в турбулентной атмосфере, в результате реактивного поведения гибких конструкций или под действием периодических вихревых срывов. Кроме того, собственный измеряемый уровень шума системы может дополнительно усиливать эти вредные эффекты. Для того чтобы в соответствующих установленных полосах частот исключить подачу ложных сигналов ошибки, приходится, соответственно, повышать пороговые значения обнаружения, а также увеличивать количество необходимых циклов подтверждения. В результате этого существенно уменьшается чувствительность обнаружения незатухающих колебаний, возникающих вследствие системных ошибок, а также увеличивается время распознавания ошибки аналитическим модулем. Это относится, в частности, к таким системным ошибкам, при которых колебательная составляющая накладывается на номинальный низкочастотный выходной сигнал системы.
Еще одна причина ограниченной эффективности функции контроля системы рулевого управления заключается во взаимных помехах между соседними диапазонами частот, поскольку технически сложно реализовать точное разделение. Такие взаимные помехи в случае различных пороговых значений могут вызывать многократные ложные срабатывания.
Кроме того, может иметь место неточность определения границ верхней полосы частот в комбинации с соответствующими твердо установленными пороговыми значениями, что связано, в частности, с динамическим реактивным поведением конструкции. Это оказывает непосредственное негативное влияние на распознавание ошибок в верхнем диапазоне частот. При применении метода счета, известного из US 2007/0124038 А1, распознавание ошибок ограничено обнаружением колебательных ошибок системы управления. Возможность распространения на другие сценарии ошибок, в частности, ошибок, связанных с переходными параметрами или ползучестью, в принципе исключается по методическим причинам. Это приводит к необходимости использовать для контроля современных систем управления параллельную установку и оснащение различными специфическими устройствами для распознавания ошибок. В целом, система, предложенная в US 2007/0124038 А1 для анализа остатка, существенно затрудняет установку чувствительного порогового значения для обнаружения ошибок в широком диапазоне без ограничения контролируемой полосы частот.
Раскрытие изобретения
В соответствии с вышеизложенным задачей настоящего изобретения является обеспечение анализа остатка для обнаружения системных ошибок, в частности, ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы воздушного судна, который не содержит недостатков, описанных выше.
В соответствии с изобретением эта задача решена при помощи устройства с признаками, указанными в пункте 1 формулы изобретения, и/или при помощи способа с признаками, указанными в пункте 14 формулы изобретения.
При этом предлагается устройство для анализа остатка с целью обнаружения ошибок системы, которая на входе получает изменяющуюся во времени величину управляющего воздействия и величину помехи, отображающую внешние помехи, а на выходе представляет выходной параметр системы, при этом указанное устройство содержит:
- устройство для генерирования остатка в зависимости по меньшей мере от величины управляющего воздействия и выходного параметра системы;
- компараторный блок для обеспечения результатов анализа путем сравнения остатка с установленным пороговым значением;
- первый блок для обеспечения постоянной составляющей порогового значения;
- второй блок для обеспечения адаптивной составляющей порогового значения в зависимости по меньшей мере от изменяющейся во времени величины управляющего воздействия; и
- третий блок для обеспечения порогового значения путем объединения постоянной составляющей порогового значения с адаптивной составляющей порогового значения.
Указанные с первого по третий блок, а также компараторный блок можно использовать в виде аппаратного обеспечения или также в виде программного обеспечения. При использовании в виде аппаратного обеспечения соответствующий блок может быть выполнен в виде компьютера или микропроцессора, узла или также части системы, например, в виде компьютерной системы. При использовании в виде программного обеспечения соответствующий блок может быть выполнен в виде компьютерного программного продукта, функции, стандартной программы, части программного кода или в виде исполняемого объекта.
Предлагается также воздушное судно, содержащее по меньшей мере одно вышеописанное устройство.
Кроме того, предлагается способ анализа остатка для обнаружения системных ошибок в поведении системы, которая получает на входе изменяющуюся во времени величину управляющего воздействия и величину помех, отображающую внешние помехи, а на выходе представляет выходной параметр системы, при этом указанный способ включает следующие операции:
- генерирование остатка в зависимости по меньшей мере от величины управляющего воздействия и выходного параметра системы;
- обеспечение постоянной составляющей порогового значения;
- обеспечение адаптивной составляющей порогового значения в зависимости по меньшей мере от изменяющейся во времени величины управляющего воздействия;
- обеспечение порогового значения путем объединения постоянной составляющей порогового значения с адаптивной составляющей порогового значения; и
- сравнение остатка с представленным пороговым значением для обеспечения результата анализа.
Предлагается также компьютерный программный продукт, использование которого для устройства с программным управлением обеспечивает осуществление вышеописанного способа анализа остатка для обнаружения системных ошибок в поведении какой-либо системы.
Достоинством настоящего изобретения является надежный анализ остатка, при помощи которого можно обнаруживать наличие системных ошибок, в частности, ошибок, связанных с переходными процессами, ползучестью, незатухающими колебаниями или осцилляциями в какой-либо системе воздушного судна, в частности, в электрогидравлической системе рулевого управления.
При этом согласно изобретению можно с высокой надежностью производить обнаружение вышеуказанных системных ошибок и, в частности, исключать ложные показания, благодаря применению адаптивного порогового значения обнаружения согласно изобретению.
Эта высокая достоверность подтверждена при программно-аппаратном тестировании реальной системы рулевого управления, результаты которого опубликованы в докторской диссертации Sachs, Helge: "Fault Investigation and Robust Failure Detection of Oscillatory Aircraft Actuation Systems Using Analytical Redundancy", Hamburg, Hamburg University of Technology, Aircraft Systems Engineering M-7.
При этом согласно изобретению высокодинамичные изменения заданного значения управляющего воздействия или величины управляющего воздействия воспроизводятся непосредственно путем адаптации порогового значения за счет адаптивной составляющей порогового значения. Таким образом, учитывается также динамическая реакция системы на помехи, которые могут возникать во время полета в турбулентной атмосфере, в результате реактивного поведения гибких конструкций или периодических вихревых срывов. В частности, благодаря этому, согласно изобретению удается обеспечить надежное и быстрое обнаружение системных ошибок, в которых колебательная составляющая накладывается на номинальный выходной низкочастотный сигнал системы.
Кроме того, ожидаемый собственный измеряемый уровень шума системы учитывается отдельно за счет постоянной составляющей порогового значения, которая предпочтительно устанавливается равной минимальному значению.
Благодаря прямому учету влияния изменяющегося во времени заданного значения управляющего воздействия согласно изобретению, больше не требуется отображать амплитуды, которые имеют место при нормальном режиме эксплуатации, при помощи пороговых значений обнаружения. Таким образом, для результирующих амплитуд ошибок можно всегда использовать во всех областях спектра минимальный предел ошибки, который ограничен только измерительной аппаратурой, которой оснащен процесс.
Кроме того, благодаря исключению метода счета, известного из US 2007/0124038 А1, согласно изобретению можно существенно уменьшить или свести к нулю время подтверждения. В частности, таким образом, значительно снижается общее время распознавания ошибки, связанной с незатухающими колебаниями с большой длительностью периода.
Кроме того, исключение традиционного метода счета позволяет обеспечивать обнаружение системных ошибок, которые не приводят к колебаниям, в частности, позиции приводного элемента поршня или поверхности управления. Вследствие этого можно обнаруживать также системные ошибки, связанные с переходными процессами и ползучестью. При этом для распознавания ошибок можно существенно уменьшить оснащение различными специфическими устройствами.
Одной из задач настоящего изобретения является обеспечение генерирования остатков для обнаружения ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы воздушного судна, которое не содержит вышеуказанных недостатков.
Эта задача решена согласно изобретению при помощи устройства с признаками пунктов формулы изобретения и/или при помощи способа с признаками пунктов формулы изобретения.
В соответствии с этим предлагается устройство для генерирования остатков с целью обнаружения ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы воздушного судна, которая получает на входе заданное управляющее воздействие и величину помех, отображающую внешние помехи, а на выходе представляет выходной параметр системы, при этом указанное устройство содержит:
- первое средство с моделью системы для отображения контролируемой системы, которое получает на входе величину управляющего воздействия, величину обратной связи наблюдателя и величину помех модели и представляет на выходе оценочный выходной параметр системы, в зависимости от указанных параметров;
- второе средство для получения остатка в виде разности между выходным параметром системы и оценочным выходным параметром системы;
- третье средство с обратной связью наблюдателя, которое получает на входе остаток и представляет на выходе величину обратной связи наблюдателя, в зависимости от указанного остатка, для динамической корректировки модели системы таким образом, чтобы оценочный выходной параметр следовал за выходным параметром системы; и
- четвертое средство с моделью помех, которое получает на входе остаток и на выходе представляет величину помех модели, в зависимости от указанного остатка, для отображения влияния внешних помех на модель системы.
Каждое из указанных с первого по четвертое средств можно применять в виде аппаратного обеспечения или также в виде программного обеспечения. При применении в виде аппаратного обеспечения соответствующее средство может быть выполнено в виде устройства, например, компьютера или микропроцессора, узла или также части системы, например, в виде компьютерной системы. При применении в виде программного обеспечения соответствующее средство может быть выполнено в виде компьютерного программного продукта, функции, стандартной программы, части программного кода или в виде исполняемого объекта.
Кроме того, предлагается воздушное судно, содержащее по меньшей мере одно из вышеописанных устройств.
Далее предлагается способ генерирования остатка для обнаружения ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы воздушного судна. Система получает на входе заданное управляющее воздействие и величину помех, отображающую внешние помехи, и представляет на выходе выходной параметр системы. Такой способ согласно изобретению включает следующие операции:
- обеспечение модели системы для отображения контролируемой системы, которая на входе получает величину управляющего воздействия, величину обратной связи наблюдателя и величину помех модели и на выходе представляет оценочный выходной параметр системы, в зависимости от указанных параметров;
- получение остатка в виде разности между выходным параметром системы и оценочным выходным параметром системы;
- обеспечение обратной связи наблюдателя, которая на входе получает остаток и на выходе представляет величину обратной связи наблюдателя, в зависимости от указанного остатка, для динамической корректировки модели системы, таким образом, чтобы оценочный выходной параметр системы следовал за выходным параметром системы;
и
- обеспечение модели помех, которая на входе получает остаток и представляет на выходе величину помех модели, в зависимости от указанного остатка, для отображения влияния внешних помех на модель системы.
Кроме того, предлагается компьютерный программный продукт, использование которого для устройства с программным управлением обеспечивает осуществление вышеописанного способа генерирования остатка для обнаружения ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы воздушного судна.
С первого по четвертое средства образуют, в частности, блок наблюдателя помех или наблюдателя помех.
Наблюдатель помех согласно изобретению определяет последующее поведение модели системы в соответствии с оценочным выходным параметром системы, например, в соответствии с положением поршня системы рулевого управления. Это обеспечивается путем определения соотношения остатка и внутреннего состояния модели системы посредством обратной связи наблюдателя. Для того чтобы аппроксимировать помехи для реального процесса или для реальной системы, в частности, посредством динамических воздушных нагрузок и измеренных уровней шума на модели системы, параллельно возврату наблюдателя создается модель помех. Приблизительное или оценочное действие помех, которое согласно изобретению отображается как величина помех модели, также соотносится с внутренними состояниями модели системы. Таким образом, наряду с последующим поведением системы в оценочном выходном параметре системы или на выходе наблюдателя помех дополнительно отображается непосредственное влияние внешних помех системы.
Достоинство настоящего изобретения заключается в надежном генерировании остатка, при помощи которого можно обнаруживать наличие ошибки, в частности, ошибки, связанной с переходными процессами, дрейфом, ползучестью или колебаниями в системе воздушного судна. Затем осуществляется анализ путем сравнения остатка с предварительно установленным пороговым значением. При помощи решения согласно изобретению можно установить надежное и высокочувствительное пороговое значение остатка для обнаружения ошибки, что подтверждено при программно-аппаратном тестировании реальной системы рулевого управления, результаты которого опубликованы в докторской диссертации Sachs, Helge: "Fault Investigation and Robust Failure Detection of Oscillatory Aircraft Actuation Systems Using Analytical Redundancy", Hamburg, Hamburg University of Technology, Aircraft Systems Engineering M-7.
При этом внешние помехи, которые оказывают влияние на процесс или систему, отображаются наблюдателем помех согласно изобретению в виде приближения. Такие внешние помехи или возмущения процесса возникают, по существу, из аэродинамических сил, которые действуют на приводную подвижную плоскость во время полета, в частности, в виде переходных помех в результате таких однократных событий, как порыв ветра, гармонических помех от периодических вихревых срывов или влияний гибкости окружающей конструкции или из случайных помех, в частности, турбулентности, и, согласно изобретению, не оказывают значительного влияния на остаток.
Кроме того, постоянное наложение результата измерения позиции приводного элемента, который служит в качестве выходного параметра системы, на измеренный уровень шума (например, выраженный отношением сигнал/шум в датчике позиции на приводном элементе штока поршня) не оказывает существенного влияния на генерированный остаток.
Как указано выше, система или процесс изменяется в результате изменений параметров или краевых условий во время работы. Примерами таких изменяющихся параметров являются скорость полета, высота полета, углы атаки и рыскания, температура, характеристики гидравлической среды приводного элемента и т.п. Эти изменения влияют на реактивное поведение и собственную динамику системы. Они также отображаются наблюдателем помех согласно изобретению в последующем принудительном поведении и поэтому не видны в остатке.
Различные начальные значения в системе и в модели системы также минимизируются за счет обратной связи наблюдателя. Поэтому они не оказывают дальнейшего влияния на генерированный остаток согласно изобретению.
Если имеются или могут быть заранее надежно описаны другие измеряемые величины системы, модель системы может быть сокращена за счет этих элементов. Измеряемые величины представляются наблюдателю помех в качестве дополнительных входных параметров. Они выгодно повышают достоверность оценочного выходного параметра системы наблюдателя помех и дополнительно минимизируют остаток.
Если части процесса или системы жестко определены, они удаляются из наблюдателя помех. В этом случае редуцированный наблюдатель помех может быть сокращен до части процесса или системы, которая связана с не измеряемыми непосредственно и/или устойчивыми динамическими эффектами. Сокращение полного наблюдателя помех до редуцированного наблюдателя помех, интегрированного в стационарные уравнения системы, приводит к дополнительному повышению стабильности и тем самым к повышению быстродействия предлагаемого способа.
В зависимых пунктах формулы изобретения описаны предпочтительные варианты осуществления и усовершенствования изобретения.
Согласно предпочтительному варианту осуществления первый блок выполнен с возможностью обеспечения постоянной составляющей порогового значения в зависимости от ожидаемого собственного измеряемого уровня шума системы.
Согласно другому предпочтительному варианту осуществления первый блок выполнен с возможностью установления минимального значения составляющей порогового значения в зависимости от ожидаемого собственного измеряемого уровня шума системы.
Согласно следующему предпочтительному варианту осуществления устройство для генерирования остатка содержит по меньшей мере модель системы для отображения контролируемой системы.
Согласно еще одному предпочтительному варианту осуществления устройство для генерирования остатка содержит:
- первое средство с моделью системы для отображения контролируемой системы, которое получает на входе величину управляющего воздействия, величину обратной связи наблюдателя и величину помех модели и представляет на выходе оценочный выходной параметр системы, в зависимости от указанных параметров;
- второе средство для получения остатка в виде разности между выходным параметром системы и оценочным выходным параметром системы;
- третье средство с обратной связью наблюдателя, которое получает на входе остаток и представляет на выходе величину обратной связи наблюдателя, в зависимости от указанного остатка, для динамической корректировки модели системы таким образом, чтобы оценочный выходной параметр системы следовал за выходным параметром системы; и
- четвертое средство с моделью помех, которое получает на входе остаток и представляет на выходе величину помех модели, в зависимости от указанного остатка, для отображения влияния внешних помех на модель системы.
При соединении концепции генерирования адаптивного порогового значения в сочетании с редуцированным наблюдателем помех при проведении программно-аппаратного тестирования реальной системы рулевого управления доказано, что, таким образом, существенно возрастает эффективность распознавания ошибок. При этом за счет снижения порога обнаружения чувствительность повышается на 55-90%. Время реконфигурации системы после работы в неуправляемом режиме, когда подвижная плоскость бесконтрольно перемещается с максимальной скоростью в ее конечное положение, составляет только 1/15 от всего интервала времени, заданного для реконфигурации. Кроме того, результирующие динамические нагрузки на конструкцию значительно уменьшаются.
Согласно другому предпочтительному варианту осуществления второй блок выполнен с возможностью обеспечения адаптивной составляющей порогового значения в зависимости от изменяющейся во времени величины управляющего воздействия и по меньшей мере от одного параметра состояния, который оценивается при помощи модели системы.
Согласно другому предпочтительному варианту осуществления второй блок выполнен с возможностью обеспечения адаптивной составляющей порогового значения в зависимости от изменяющейся во времени величины управляющего воздействия и по меньшей мере от одного представленного измеряемого параметра системы и/или по меньшей мере от одного параметра состояния, который оценивается при помощи модели системы.
Согласно другому предпочтительному варианту осуществления третий блок выполнен с возможностью суммирования постоянной составляющей порогового значения и адаптивной составляющей порогового значения для обеспечения порогового значения.
Согласно другому предпочтительному варианту осуществления компараторный блок устанавливает положительное логическое значение для результата анализа с целью отображения ошибки системы, если представленный остаток превышает представленное пороговое значение.
Согласно другому предпочтительному варианту осуществления предусмотрен четвертый блок, который активирует компараторный блок после истечения предварительно установленного времени подтверждения.
Согласно другому предпочтительному варианту осуществления системная ошибка образуется как ошибка, связанная с переходным процессом, дрейфом или колебанием.
Краткое описание чертежей
Ниже приведено более подробное описание примеров осуществления изобретения со ссылками на прилагаемые чертежи, на которых представлены:
фиг.1 - упрощенная блок-схема примера осуществления традиционного устройства для генерирования остатков с целью обнаружения ошибок системы воздушного судна;
фиг.2 - упрощенная блок-схема первого примера осуществления устройства для анализа остатка с целью обнаружения системных ошибок в поведении системы воздушного судна;
фиг.3 - упрощенная блок-схема второго примера осуществления устройства для анализа остатков с целью обнаружения системных ошибок в поведении системы воздушного судна;
фиг.4 - упрощенная блок-схема первого примера осуществления устройства для генерирования остатков с целью обнаружения системных ошибок в поведении системы воздушного судна;
фиг.5 - упрощенная блок-схема второго примера осуществления устройства для генерирования остатков с целью обнаружения системных ошибок в поведении системы воздушного судна;
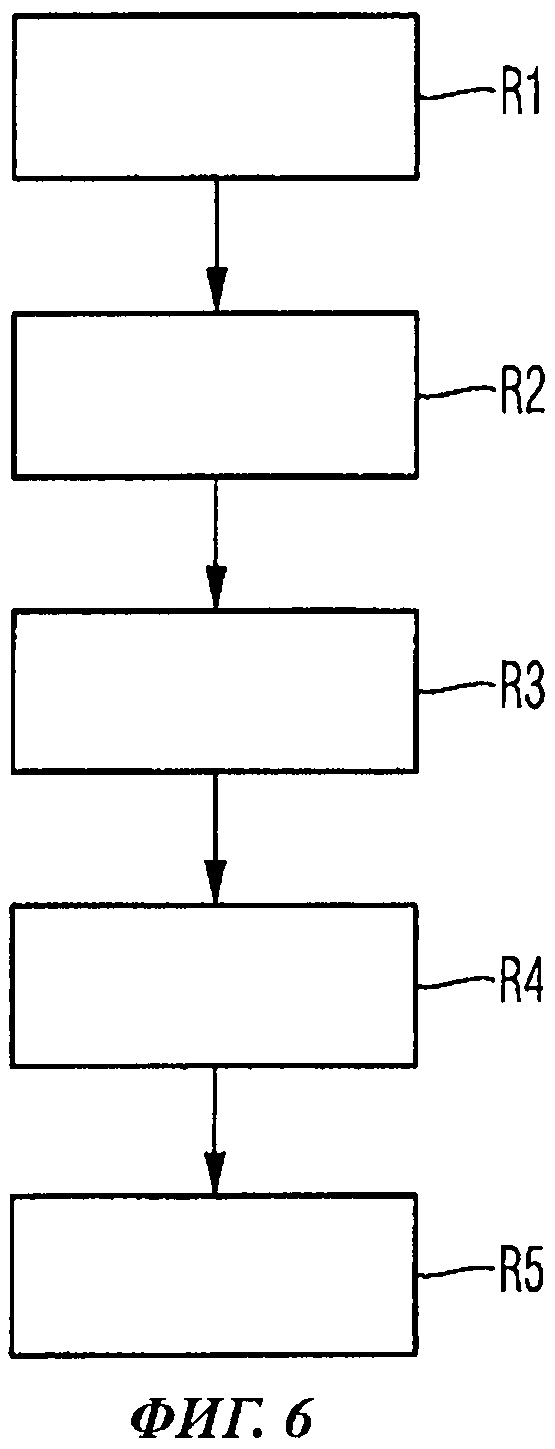
фиг.6 - упрощенная блок-схема примера осуществления способа анализа остатка для обнаружения системных ошибок в поведении системы воздушного судна;
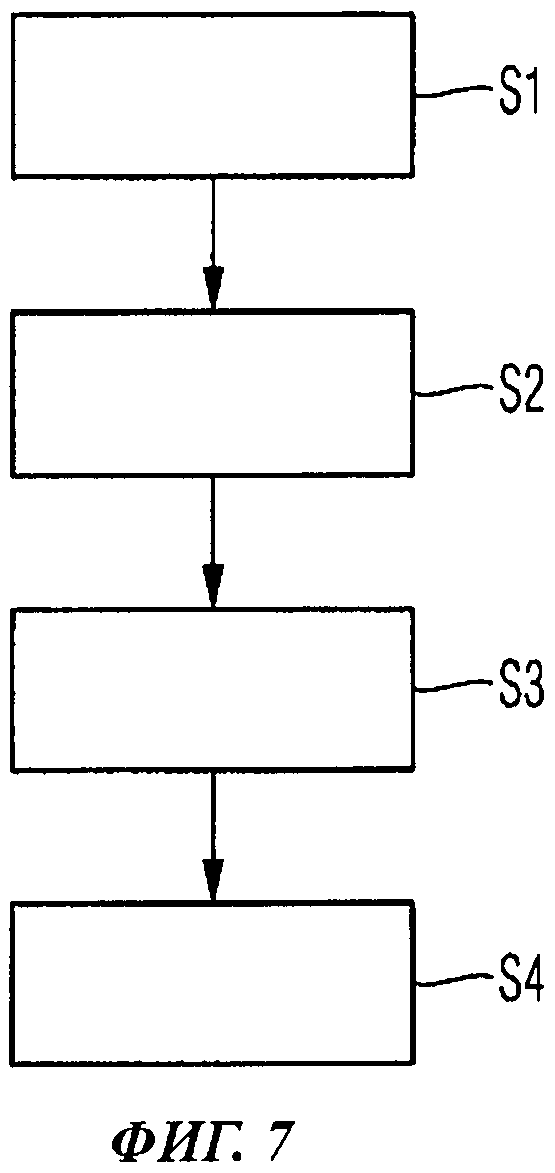
фиг.7 - упрощенная блок-схема примера осуществления способа генерирования остатков с целью обнаружения системных ошибок в поведении системы воздушного судна; и
фиг.8-12 - схематические временные диаграммы, иллюстрирующие анализ остатка согласно изобретению для обнаружения системных ошибок в поведении системы воздушного судна.
Если не указано иного, одинаковые или функционально одинаковые компоненты обозначены на чертежах одними и теми же ссылочными номерами.
Осуществление изобретения
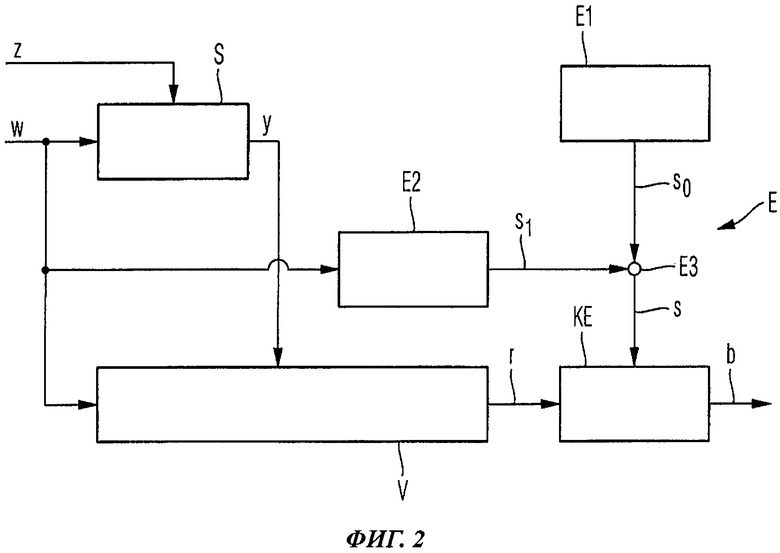
На фиг.2 показана упрощенная блок-схема первого примера осуществления устройства Е анализа остатка r для обнаружения системных ошибок в поведении системы S воздушного судна. Система S получает на входе изменяющуюся во времени величину w управляющего воздействия и величину z помех, отображающую внешние помехи. В зависимости от указанных параметров система S представляет на выходе выходной параметр у системы. Устройство Е для анализа остатков содержит по меньшей мере одно устройство V для генерирования остатка r, компараторный блок KE, первый блок Е1, второй блок Е2 и третий блок Е3.
Устройство V пригодно для генерирования остатка r, при этом устройство V генерирует остаток r в зависимости по меньшей мере от величины w управляющего воздействия и выходного параметра у системы.
Устройство V выполнено, в частности, как показано в одном из примеров осуществления на фигурах 4 или 5.
Компараторный блок KE представляет результат b анализа путем сравнения остатка r с представленным пороговым значением s.
Для обеспечения порогового значения s предусмотрены блоки Е1-Е3.
При этом первый блок Е1 выполнен с возможностью обеспечения постоянной составляющей s0 порогового значения.
Второй блок Е2 выполнен с возможностью обеспечения адаптивной составляющей s1 порогового значения в зависимости по меньшей мере от изменяющейся во времени величины w управляющего воздействия.
Третий блок Е3 выполнен с возможностью обеспечения порогового значения s путем объединения постоянной составляющей s0 порогового значения с адаптивной составляющей s1 порогового значения. В частности, третий блок Е3 суммирует постоянную составляющую s0 порогового значения и адаптивную составляющую s1 порогового значения для получения порогового значения s.
Компараторный блок KE устанавливает положительное логическое значение для результата b анализа с целью отображения ошибки системы в том случае, если представленный остаток r превышает представленное пороговое значение s. Альтернативно этому результат b анализа может быть представлен в виде сигнала, например, в виде непрерывного сигнала, который может отображать оба возможных состояния (r>s и r≤s).
На фиг.3 показан второй пример осуществления устройства Е согласно изобретению для анализа остатка r с целью обнаружения системных ошибок в поведении системы S воздушного судна.
Второй пример осуществления согласно фиг.3 содержит все признаки первого примера осуществления с фиг.2, которые не описываются во избежание повторений.
Во втором примере осуществления устройства Е согласно изобретению первый блок Е1 выполнен с возможностью обеспечения постоянной составляющей s0 порогового значения в зависимости от ожидаемого собственного измеряемого уровня шума mr системы S.
При этом первый блок Е1 устанавливает постоянное пороговое значение s0 предпочтительно на минимальном уровне.
Далее согласно фиг.3 второй блок Е2 выполнен с возможностью обеспечения адаптивной составляющей s1 порогового значения в зависимости от изменяющейся во времени величины w управляющего воздействия, по меньшей мере от одного представленного измеряемого параметра тд системы S и/или от параметра zg состояния, который оценивается при помощи устройства V модели SM системы.
Кроме того, устройство Е предпочтительно содержит четвертый блок Е4, который активирует компараторный блок KE после истечения предварительно установленного времени подтверждения. Для этого четвертый блок Е4 управляет компараторным блоком KE предпочтительно при помощи активирующего сигнала а.
Примеры устройства V для генерирования остатков r показаны на фигурах 4 и 5.
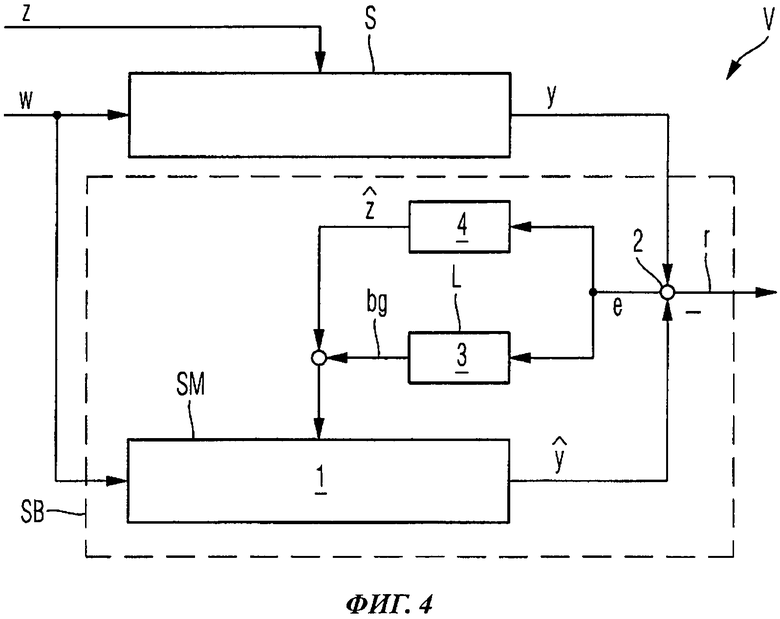
На фиг.4 представлена упрощенная блок-схема примера осуществления устройства V согласно изобретению для генерирования остатков с целью обнаружения системных ошибок, в частности, ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы S воздушного судна.
Устройство V для генерирования остатков с целью обнаружения ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы S воздушного судна содержит первое средство 1, второе средство 2, третье средство 3 и четвертое средство 4. С первого по четвертое средства 1-4 образуют блок SB наблюдателя помех. Система S получает на входе заданное значение w управляющего воздействия и величину z помех, которая отображает внешние помехи, действующие на систему S. В зависимости от этого система представляет на выходе выходной параметр у системы. Система S представляет собой, например, электрогидравлическую систему рулевого управления воздушного судна, при этом выходной параметр у системы представляет собой измеренное перемещение приводного элемента поршня системы S рулевого управления, обеспечивающей позиционное управление.
Первое средство 1 содержит модель SM системы для отображения контролируемой системы S. Первое средство 1 получает на входе величину w управляющего воздействия, величину b обратной связи наблюдателя и величину 
Второе средство 2 обеспечивает получение остатка r в виде разности между выходным параметром у системы и оценочным выходным параметром
Третье средство 3 выполнено в виде блока L обратной связи наблюдателя. Третье средство 3 получает на входе остаток r и в зависимости от полученного остатка r представляет на выходе величину bg обратной связи наблюдателя для динамической корректировки модели SM системы таким образом, чтобы оценочный выходной параметр
Далее четвертое средство 4 оснащено моделью ZM помех, которая получает на входе остаток r и в зависимости от него представляет на выходе величину 
Блок L обратной связи наблюдателя предназначен, в частности, для динамической корректировки внутренних состояний модели SM системы, чтобы, таким образом, получить оценочный выходной параметр 
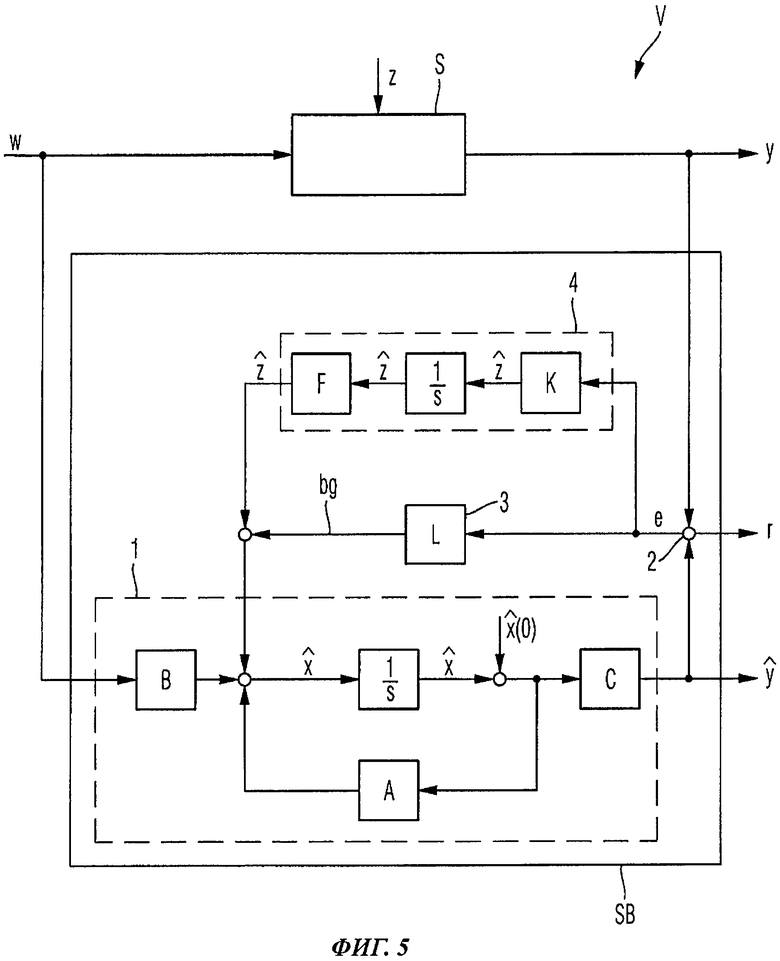
На фиг.5 показан второй пример осуществления устройства V согласно изобретению для генерирования остатка r с целью обнаружения системных ошибок, в частности, ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы S воздушного судна.
Второй пример осуществления согласно фиг.5 содержит все признаки первого примера осуществления с фиг.4, которые не описываются еще раз во избежание повторений.
Во втором примере осуществления устройства V согласно изобретению блок SB наблюдателя помех содержит матрицу L обратной связи наблюдателя для получения величины обратной связи наблюдателя. При этом коэффициенты матрицы L обратной связи наблюдателя определяются при помощи проекта регулятора параметров состояния. Проект регулятора параметров состояния получается, например, путем задания полюса, оптимального расчета регулятора, способа проектирования для расчета надежных обратных связей, линейной квадратичной оценки (LQE; Linear Quadratic Estimator) или нелинейных подходов.
Далее величина
Динамическая величина





На фиг.6 показана упрощенная блок-схема примера осуществления способа анализа остатка r для обнаружения системных ошибок в поведении системы S воздушного судна.
Ниже приведено описание способа согласно изобретению при помощи упрощенной блок-схемы на фиг.6 со ссылками на упрощенную блок-схему на фиг.2. Пример осуществления способа согласно изобретению, показанный на фиг.6, включает следующие операции R1-R5:
Операция R1:
Генерирование остатка r в зависимости по меньшей мере от величины w управляющего воздействия и выходного параметра у системы.
Операция R2:
Обеспечение постоянной составляющей s0 порогового значения.
Операция R3:
Обеспечение адаптивной составляющей s1 порогового значения в зависимости по меньшей мере от изменяющейся во времени величины w управляющего воздействия.
Операция R4:
Обеспечение порогового значения s путем объединения, в частности, при помощи сложения, постоянной составляющей s0 порогового значения с адаптивной составляющей s1 порогового значения.
Операция R5:
Сравнение остатка r с представленным пороговым значением s для обеспечения результата b анализа. Если остаток r превышает представленное пороговое значение s, констатируется системная ошибка системы S.
На фиг.7 показана упрощенная блок-схема примера осуществления способа генерирования остатка r согласно изобретению для обнаружения системных ошибок, в частности, ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы S воздушного судна, на вход которой поступает величина w управляющего воздействия и величина z помех, отображающая внешние помехи, а на выходе представляется выходной параметр у системы.
Ниже приведено описание способа согласно изобретению, показанного на упрощенной блок-схеме на фиг.7 со ссылками на блок-схему на фиг.4. Пример осуществления способа, показанный на фиг.7, содержит следующие операции S1-S4.
Операция S1:
Обеспечение модели SM системы для отображения контролируемой системы S. Модель SM системы получает на входе величину w управляющего воздействия, величину bg обратной связи наблюдателя и величину z помех модели. В зависимости от указанных параметров модель SM системы представляет на выходе оценочный выходной параметр
Операция S2:
Получение остатка r в виде разности между выходным параметром у системы и оценочным выходным параметром
Операция S3:
Обеспечение обратной связи L наблюдателя, которая получает на входе остаток r и в зависимости от указанного остатка представляет на выходе величину bg обратной связи наблюдателя для динамической корректировки модели SM системы таким образом, чтобы оценочный выходной параметр
Операция S4:
Обеспечение модели ZM помех, которая получает на входе остаток r и в зависимости от указанного остатка представляет на выходе величину 
При установленном наличии еще одного измеряемого параметра системы S число оценочных системных параметров в модели SM системы предпочтительно уменьшается на этот дополнительный измеряемый параметр, и этот дополнительный измеряемый параметр вводится непосредственно в модель SM системы в качестве дополнительного входного параметра.
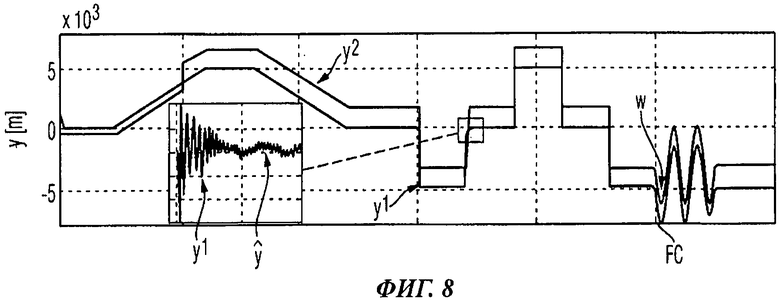
На фигурах 8-12 показаны схематические временные диаграммы, которые иллюстрируют анализ остатка r согласно изобретению для обнаружения системных ошибок FC в поведении системы S воздушного судна.
В основе примера, показанного на фигурах 8-12, лежит система S, которая представляет собой систему рулевого управления с первым приводным элементом поршня и со вторым, резервным приводным элементом поршня и в которой управляющее воздействия первого приводного элемента поршня, используемого как первый приводной элемент, служит в качестве выходного сигнала y1 системы, а управляющее воздействие резервного второго приводного элемента поршня, используемого как второй приводной элемент, служит в качестве выходного сигнала y2 системы.
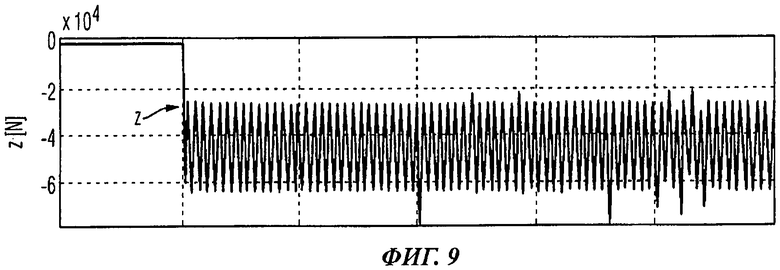
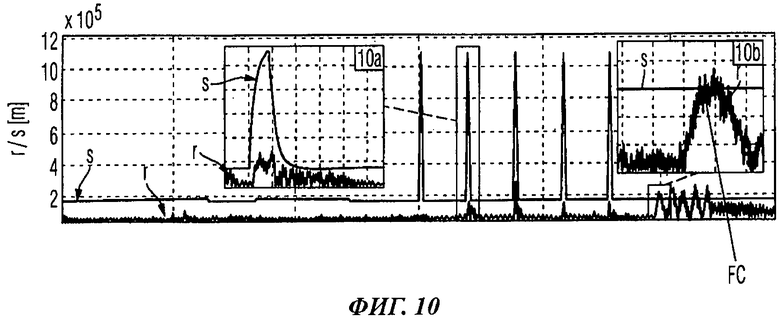
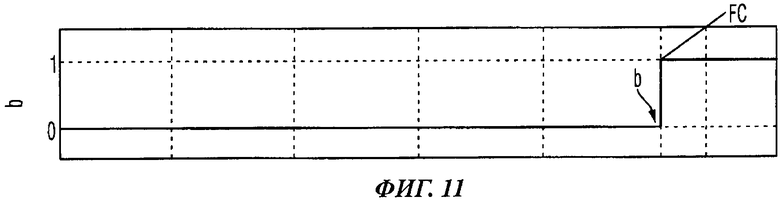
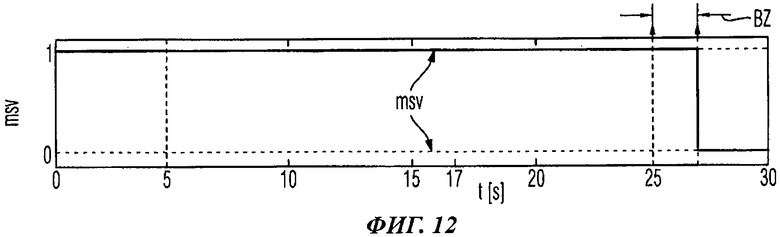
При этом на фигуре 8 показана зависимость выходных сигналов y1 и y2 системы от времени. Далее на фигуре 9 показана зависимость величины z помех от времени. На фигуре 10 показаны зависимости от времени остатка r и порогового значения s согласно изобретению. Затем на фигурах 11 и 12 показана зависимость от времени результата b анализа, а также зависимость от времени управляющего сигнала msv, который генерируется в зависимости от результатов b анализа для выбора приводного элемента 1 или 2.
Как указано выше, на фигуре 8 показана зависимость от времени выходных сигналов y1 и y2. В момент времени t=17 с выходные сигналы y1 и y2 системы резко возрастают в соответствии с заданным значением w управляющего воздействия.
Далее на фигуре 9 показана зависимость от времени величины z помех, соответствующей силе, которая посредством приводного элемента 1 или 2 нагружает приводную подвижную плоскость воздушного судна. Эта сила называется также аэродинамической или воздушной нагрузкой.
На фигуре 10 показана зависимость от времени остатка r и порогового значения s согласно изобретению. При этом фигура 10а является детальным изображением фрагмента фигуры 10 в момент времени t=17 с, когда согласно фигуре 8 имеет место скачкообразный рост величины w управляющего воздействия и, следовательно, выходных параметров y1 и y2 системы. Согласно изобретению пороговое значение s согласуется с заданным значением w управляющего воздействия, т.е. пороговое значение s согласуется со скачком заданного значения w управляющего воздействия и поэтому также имеет скачок (см. фиг.10а). В результате этого в момент времени t=17 с согласно фигуре 11 ошибка не обнаружена, поэтому в момент времени t=17 с b=0.
В момент времени t=25 с, напротив, возникает системная ошибка FC, которая приводит колебаниям выходных сигналов y1 и y2 системы. Поскольку после этого момента времени t=25 с заданное значение w управляющего воздействия не изменяется, пороговое значение s также не изменяется. Вследствие этого в момент времени t=25 с остаток r превышает представленное пороговое значение s. Это подробно показано на фигуре 10b.
В результате этого, как показано на фигуре 11, результат b анализа изменяется от 0 до 1, т.е., в момент времени t=25 с b=1.
Как показано на фигуре 12, после истечения времени BZ подтверждения, которое составляет, например, 2 с, управляющий сигнал msv изменяется от 1 до 0. Это изменение указывает, что происходит переключение с первого приводного элемента на второй приводной элемент. При этом в момент времени t=27 с реконфигурация и, следовательно, переключение системы S с первого приводного элемента на второй приводной элемент заканчивается.
Согласно изобретению время подтверждения можно установить также равным 0, поскольку уже в момент времени t=25 с установлена необходимость переключения с приводного элемента 1 на приводной элемент 2.
Настоящее изобретение описано при помощи предпочтительных примеров осуществления, однако не ограничивается ими и может быть модифицировано различными способами.
Перечень ссылочных обозначений
1 Первое средство
2 Второе средство
3 Третье средство
4 Четвертое средство
а Активирующий сигнал
BZ Время подтверждения
b Результат анализа
bg Величина обратной связи наблюдателя или выходной сигнал обратной связи наблюдателя
А Системная матрица линейной модели SM системы
B Входная матрица линейной модели SM системы
C Выходная матрица линейной модели SM системы
E1 Первый блок
E2 Второй блок
E3 Третий блок
E4 Четвертый блок
F Матрица величины помех
KE Компараторный блок
K Корректирующая матрица
L Матрица обратной связи наблюдателя
mg Измеряемый параметр
mr Измеряемый уровень шума
R1-R5 Операция
r Остаток
S Система
S1-S4 Операция
SB Блок наблюдателя помех
SM Модель системы
FC Системная ошибка
w Величина управляющего воздействия
y Выходной параметр системы
z Величина помех
zg Параметр состояния

ZM Модель помех

| название | год | авторы | номер документа |
|---|---|---|---|
| ОСНОВАННАЯ НА МОДЕЛИ СИСТЕМА ОБНАРУЖЕНИЯ НЕИСПРАВНОСТЕЙ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ | 1997 |
|
RU2155328C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТОРПЕДЫ | 2012 |
|
RU2492497C1 |
| ФОРМИРОВАНИЕ ОПИСАНИЯ ПЛАНОВОЙ СХЕМЫ ПОВЕДЕНИЯ ВОЗДУШНОГО СУДНА | 2014 |
|
RU2677833C2 |
| СИСТЕМЫ ОПОЗНАВАНИЯ И НАВЕДЕНИЯ ПРИ ПАРКОВКЕ ВОЗДУШНЫХ СУДОВ | 2000 |
|
RU2268498C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ПАРА ДЛЯ ПАРОСИЛОВОЙ УСТАНОВКИ | 2010 |
|
RU2486405C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СИСТЕМА УПРАВЛЕНИЯ СВЕТОМ И СПОСОБ АВТОМАТИЧЕСКОГО ПРЕДОСТАВЛЕНИЯ СЦЕНЫ ОСВЕЩЕНИЯ | 2008 |
|
RU2497317C2 |
| СПОСОБ И СИСТЕМА НАПРАВЛЕННОГО БУРЕНИЯ, ИСПОЛЬЗУЮЩИЕ КОНТУРЫ МНОГОКРАТНОЙ ОБРАТНОЙ СВЯЗИ | 2014 |
|
RU2669414C1 |
| ОРГАНИЗАЦИЯ СИСТЕМЫ УПРАВЛЕНИЯ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2013 |
|
RU2658392C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СЕТЕВЫХ АТАК НА ОСНОВЕ АНАЛИЗА ВРЕМЕННОЙ СТРУКТУРЫ ТРАФИКА | 2017 |
|
RU2680756C1 |
Настоящее изобретение обеспечивает устройство и способ анализа остатка для обнаружения системных ошибок в поведении системы воздушного судна. Технический результат - повышение точности оценки состояния системы воздушного судна. Устройство для анализа остатка содержит устройство для генерирования остатка в зависимости, по меньшей мере, от величины управляющего воздействия и выходного параметра системы, компараторный блок для обеспечения результата анализа путем сравнения остатка с установленным пороговым значением, первый блок для обеспечения постоянной составляющей порогового значения, второй блок для обеспечения адаптивной составляющей порогового значения в зависимости по меньшей мере от изменяющейся во времени величины управляющего воздействия и третий блок для обеспечения порогового значения, путем объединения постоянной составляющей порогового значения с адаптивной составляющей порогового значения. 6 н. и 17 з.п. ф-лы, 12 ил.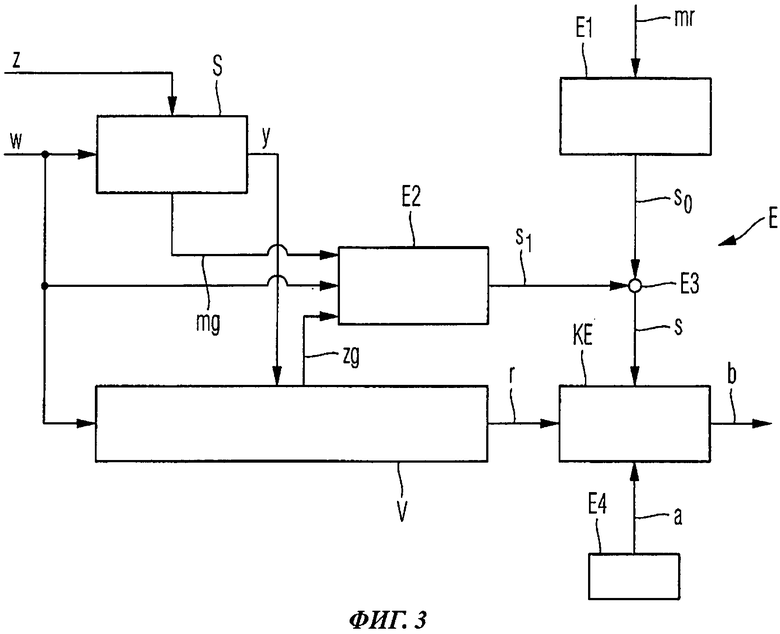
1. Устройство (V) для генерирования остатка с целью обнаружения ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы (S) воздушного судна, получающей на входе величину (w) управляющего воздействия и величину (z) помех, отображающую внешние помехи, и представляющей на выходе выходной параметр (у) системы, содержащее:
a) первое средство (1) с моделью (SM) системы для отображения контролируемой системы (S), которое получает на входе величину (w) управляющего воздействия, величину (bg) обратной связи наблюдателя и величину (
b) второе средство (2) для получения остатка (r) в виде разности между выходным параметром (y) системы и оценочным выходным параметром (y) системы;
c) третье средство (3) с обратной связью наблюдателя, которое получает на входе остаток (r) и представляет на выходе величину (bg) обратной связи наблюдателя, в зависимости от указанного остатка, для динамической корректировки модели (SM) системы таким образом, чтобы оценочный выходной параметр (
d) четвертое средство (4) с моделью (ZM) помех, которое получает на входе остаток (r) и представляет на выходе величину (

2. Устройство по п.1, отличающееся тем, что система (S) представляет собой электрогидравлическую систему рулевого управления воздушного судна.
3. Устройство по п.2, отличающееся тем, что выходной параметр (y) системы представляет собой измеренное перемещение приводного поршня системы (S) рулевого управления или измеренную позицию поверхности управления воздушного судна.
4. Устройство по п.1, отличающееся тем, что обратная связь наблюдателя настроена для динамической корректировки внутренних состояний модели (SM) системы таким образом, чтобы оценочный выходной параметр системы (
5. Устройство по п.4, отличающееся тем, что обратная связь наблюдателя включает матрицу (L) обратной связи наблюдателя.
6. Устройство по п.5, отличающееся тем, что коэффициенты матрицы (L) обратной связи наблюдателя определяются при помощи проекта регулятора параметров состояния, в частности, путем задания полюса, оптимального расчета регулятора, способа проектирования для расчета надежных обратных связей, линейной квадратичной оценки (LQE) или нелинейных подходов.
7. Воздушное судно, содержащее одно или несколько устройств (V) по одному из пп.1-6.
8. Способ генерирования остатка для обнаружения ошибок, связанных с переходными процессами, дрейфом или колебаниями, в поведении системы (S) воздушного судна, получающей на входе величину (w) управляющего воздействия и величину (z) помех, отображающую внешние помехи, и представляющей на выходе выходной параметр (y) системы, включающий следующие операции:
a) обеспечение модели (SM) системы для отображения контролируемой системы (S), которая получает на входе величину (w) управляющего воздействия, величину (bg) обратной связи наблюдателя и величину помех (
b) получение остатка (r) в виде разности между выходным параметром (у) системы и оценочным выходным параметром (
c) обеспечение обратной связи наблюдателя, которая получает на входе остаток (r) и представляет на выходе величину (bg) обратной связи наблюдателя, в зависимости от указанного остатка, для динамической корректировки модели (SM) системы таким образом, чтобы оценочный выходной параметр (
d) обеспечение модели (ZM) помех, которая получает на входе остаток (r) и представляет на выходе величину (
9. Способ по п.8, отличающийся тем, что при наличии дополнительного измеряемого параметра системы (S) модель (SM) системы сокращают на такой дополнительный измеряемый параметр и этот дополнительный измеряемый параметр вводят в модель (SM) системы в качестве дополнительного входного параметра.
10. Устройство (Е) для анализа остатка (r) с целью обнаружения ошибок системы (S), которая получает на входе изменяющуюся во времени величину (w) управляющего воздействия и величину (z) помех, отображающую внешние помехи, а на выходе представляет выходной параметр (y) системы, содержащее:
a) устройство (V) для генерирования остатка (r) в зависимости, по меньшей мере, от величины (w) управляющего воздействия и выходного параметра (y) системы;
b) компараторный блок (KE) для обеспечения результата (b) анализа путем сравнения остатка (r) с установленным пороговым значением (s);
c) первый блок (E1) для обеспечения постоянной составляющей (s0) порогового значения;
d) второй блок (Е2) для обеспечения адаптивной составляющей (s1) порогового значения в зависимости, по меньшей мере, от изменяющейся во времени величины (w) управляющего воздействия; и
e) третий блок (Е3) для обеспечения порогового значения (s) путем объединения постоянной составляющей (s0) порогового значения с адаптивной составляющей (s1) порогового значения.
11. Устройство по п.10, отличающееся тем, что первый блок (Е1) выполнен с возможностью обеспечения постоянной составляющей (s0) порогового значения в зависимости от ожидаемого собственного измеряемого уровня шума (mr) системы (S).
12. Устройство по п.11, отличающееся тем, что первый блок (Е1) выполнен с возможностью установления минимального значения постоянной составляющей (s0) порогового значения в зависимости от ожидаемого собственного измеряемого уровня шума (mr) системы (S).
13. Устройство по п.10, отличающееся тем, что второй блок (Е2) выполнен с возможностью обеспечения адаптивной составляющей (s1) порогового значения в зависимости от изменяющейся во времени величины (w) управляющего воздействия и, по меньшей мере, от одного представленного измеряемого параметра (mg) системы (S).
14. Устройство по п.10, отличающееся тем, что устройство (V) для генерирования остатка (r) содержит по меньшей мере одну модель (SM) системы для отображения контролируемой системы (S).
15. Устройство по п.10, отличающееся тем, что устройство (V) для генерирования остатка (r) содержит:
первое средство (1) с моделью (SM) системы для отображения контролируемой системы (S), которое получает на входе величину (w) управляющего воздействия, величину (bg) обратной связи наблюдателя и величину помех (z) модели и представляет на выходе оценочный выходной параметр (
второе средство (2) для получения остатка (r) в виде разности между выходным параметром (y) системы и оценочным выходным параметром (
третье средство (3) с обратной связью наблюдателя, которое получает на входе остаток (r) и представляет на выходе величину (bg) обратной связи наблюдателя, в зависимости от указанного остатка, для динамической корректировки модели (SM) системы таким образом, чтобы оценочный выходной параметр (
четвертое средство (4) с моделью (ZM) помех, которое получает на входе остаток (г) и представляет на выходе величину помех (z) модели, в зависимости от указанного остатка, для отображения влияния внешних помех на модель (SM) системы.
16. Устройство по п.14, отличающееся тем, что второй блок (Е2) выполнен с возможностью обеспечения адаптивной составляющей (s1) порогового значения в зависимости от изменяющейся во времени величины (w) управляющего воздействия и, по меньшей мере, от одного параметра (zg) состояния, который оценивается при помощи модели (SM) системы.
17. Устройство по п.14, отличающееся тем, что второй блок (Е2) выполнен с возможностью обеспечения адаптивной составляющей (s1) порогового значения в зависимости от изменяющейся во времени величины (w) управляющего воздействия и, по меньшей мере, от одного представленного измеряемого параметра (mg) системы (S), и/или, по меньшей мере, от одного параметра (zg) состояния, который оценивается при помощи модели (SM) системы.
18. Устройство по п.10, отличающееся тем, что третий блок (Е3) выполнен с возможностью суммирования постоянной составляющей (s0) порогового значения и адаптивной составляющей (s1) порогового значения для обеспечения порогового значения (s).
19. Устройство по п.10, отличающееся тем, что компараторный блок (KE) устанавливает положительное логическое значение для результата (b) анализа с целью отображения ошибки системы в том случае, если представленный остаток (r) превышает представленное пороговое значение (s).
20. Устройство по п.19, отличающееся тем, что предусмотрен четвертый блок (Е4), который активирует компараторный блок (KE) по истечении предварительно установленного времени подтверждения.
21. Устройство по п.10, отличающееся тем, что системные ошибки включают ошибки, связанные с переходными процессами, дрейфом или колебаниями.
22. Воздушное судно, содержащее одно или несколько устройств (Е) по одному из пп.10-21.
23. Способ анализа остатка (r) для обнаружения системных ошибок в поведении системы (S), которая получает на входе изменяющуюся во времени величину (w) управляющего воздействия и величину (z) помех, отображающую внешние помехи, а на выходе представляет выходной параметр (y) системы, включающий следующие операции:
a) генерирование остатка (r) в зависимости, по меньшей мере, от величины (w) управляющего воздействия и выходного параметра (y) системы;
b) обеспечение постоянной составляющей (s0) порогового значения;
c) обеспечение адаптивной составляющей (s1) порогового значения в зависимости по меньшей мере от изменяющейся во времени величины (w) управляющего воздействия;
а) обеспечение порогового значения (s) путем объединения постоянной составляющей (s0) порогового значения с адаптивной составляющей (s1) порогового значения; и
е) сравнение остатка (r) с представленным пороговым значением (s) для обеспечения результата (b) анализа.
| PONS R., JAUBERTHIE С., TRAVE-MASSUYES L., GOUPIL P | |||
| «Interval Anaysis based learning for fault model Identification; Application to control surfaces oscillatory failures» ASSOCIATION FOR THE ADVANCEMENT OF ARTIFICIAL INTELLIGENCE www.aaai.org, 19 May 2008, XP002606940 retrieved from the Internet: http:/www.cs.colorado.edu/ ~ |

