Изобретения относятся к гироскопическому инклинометру (гироинклинометру) и могут быть использованы для начальной азимутальной ориентации скважинного прибора гироинклинометра.
Известен способ начальной азимутальной ориентации скважинного прибора гироинклинометра [1], содержащего гироскопическую платформу (гироплатформу), который заключается в том, что, гироплатформу вращают с постоянной угловой скоростью, измеряют посредством синусно-косинусного трансформатора (СКТ) в последовательных положениях угол поворота гироплатформы, обрабатывают сигнал датчика угловой скорости, определяют угол между системой координат скважинного прибора и направлением на географический меридиан.
Недостатками такого способа являются сложность и продолжительность начальной азимутальной ориентации скважинного прибора, необходимость строгого контроля его зенитного угла.
Известно устройство для начальной азимутальной ориентации гироинклинометра [1], содержащее узел фиксации и скважинный прибор, датчик информации которого содержит гироплатформу с закрепленными на ней двумя акселерометрами и датчиком угловой скорости на основе трехстепенного индикаторного гироскопа на сферической ширикоподшипниковой опоре.
Недостатком данного устройства является то, что применение при начальной азимутальной ориентации трехстепенного индикаторного гироскопа на сферической шарикоподшипниковой опоре не позволяет получить высокую точность расчета угла между системой координат скважинного прибора и направлением на географический меридиан на широтах более 65°, тем самым ограничивает область применения гироинклинометра.
Наиболее близким к заявленному способу является способ контроля азимутальной направленности скважины [2], который заключается в том что, предварительную выставку гироскопического датчика гироинклинометра осуществляют посредством системы спутниковой навигации GPS, путем выставки базового значения азимутального угла.
Недостатком такого способа является то, что определение базового значения азимутального угла при начальной азимутальной ориентации возможно только в горизонтальном положении скважинного прибора, при котором проекция продольной оси скважинного прибора на азимутальную плоскость максимальна. Обеспечение такого положения скважинного прибора требует специального оборудования и является трудновыполнимой задачей в реальных полевых условиях. При переходе к измерению скважины скважинный прибор необходимо развернуть в вертикальное положение и переместить в устье скважины, однако, данные перемещения накладывают определенные ограничения по максимальным угловым скоростям движения, что может быть значительным препятствием применения данного способа.
Известна поверочная инклинометрическая установка для реализации способа контроля азимутальной направленности скважины [2], содержащая массивное основание с регулировочными винтами и вертикальной осью, поворотную платформу с узами фиксации скважинного прибора гироинклинометра, установленную на вертикальной оси основания с возможностью вращения в горизонтальной плоскости, систему дисков и лимбов с червячными передачами или электроприводами для выставки углов датчиков инклинометра. Поверочная инклинометрическая установка дополнительно снабжена системой спутниковой навигации GPS в виде блока приема сигналов спутниковой навигации GPS, состоящего из интерфейсного блока и приемника сигналов и как минимум двух антенн. При этом антенны установлены относительно друг друга по базовой линии, параллельной оси скважинного прибора.
Недостатком данного устройства является то, что фиксация на поворотной платформе поверочной инклинометрической установки скважинного прибора в положении, при котором продольная ось скважинного прибора параллельна базовой линии антенн, должны быть осуществлена с высокой точностью, что является сложно выполнимой задачей. Также поскольку скважинный прибор, согласно устройству, закрепляют в горизонтальном положении на поворотной платформе, то ее размеры должны соответствовать размерам скважинного прибора. Устройство с такими габаритными размерами вызовет неудобства при эксплуатации и транспортировке. Также недостатком данного устройства является сложность конструкции.
Известно устройство для поверки скважинных инклинометров [3], которое содержит двухстороннюю призму. На двух боковых поверхностях призм имеются направляющие канавки прямоугольного сечения, параллельные установочным поверхностям призм. Канавки служат направляющими для скоб, которые свободно перемещаются вдоль канавок в пределах тела призмы. На противоположные установочные поверхности призмы с помощью прижимных винтов и подпятников фиксируются поверяемый инклинометр и эталонный прибор.
Недостатком данного устройство, является то, что оно не позволяет установить скважинный прибор в вертикальном положении и обеспечить при этом его неподвижность.
Наиболее близким к заявленному устройству является установочный стол инклинометрический УСИ-2 [4], который состоит из неподвижной и подвижной частей. Неподвижная часть включает колонку на подставке. Три лапы подставки имеют регулировочные винты для установки колонки в вертикальное положение. Подвижная часть стола выполнена с возможностью вращения вокруг горизонтальной и вертикальной осей. Зенитный и азимутальный углы отсчитывают соответственно по вертикальному и горизонтальному лимбам. Поверяемый инклинометр закрепляют в зажиме, который соединен с платой, установленной на колонке.
Недостатком известного установочного стола является неудобство его эксплуатации в полевых условиях.
Задачей, на решение которой направлены настоящие изобретения, является повышение точности начальной азимутальной ориентации, расширение области применения и повышение технико-экономических показателей гироинклинометра.
Поставленная задача решается за счет того, что в способе начальной азимутальной ориентации скважинного прибора непрерывного гироскопического инклинометра, заключающегося в определении ориентации системы координат, связанной с корпусом скважинного прибора, и приборной системы координат скважинного прибора относительно географической системы координат с использованием спутниковой угломерной навигационной аппаратуры, согласно изобретению, начальную азимутальную ориентацию осуществляют при вертикальном положении скважинного прибора путем определения значения угла отклонителя в системе координат, связанной с корпусом скважинного прибора, для чего на устье скважины устанавливают антенны спутниковой угломерной навигационной аппаратуры в произвольное фиксированное направление в азимутальной плоскости, причем перпендикуляр к оси, проходящей через фазовые центры антенн спутниковой угломерной навигационной аппаратуры, располагают вертикально, по показаниям спутниковой угломерной навигационной аппаратуры фиксируют значение угла курса Ψ, затем замещают антенны спутниковой угломерной навигационной аппаратуры, скважинным прибором, причем располагают его вертикально в фиксированном направлении, ранее выбранном при установке антенн спутниковой угломерной навигационной аппаратуры, включают гироскопический инклинометр, вводят в программное обеспечение гироскопического инклинометра значение угла курса Ψ, как значение угла отклонителя, и в результате программного расчета получают значения параметров начального положения системы координат скважинного прибора относительно географической системы координат по формулам:


где Ψ - угол между направлением на север и осью, проходящей через фазовые центры антенн спутниковой угломерной навигационной аппаратуры или угол курса спутниковой угломерной навигационной аппаратуры или угол отклонителя;
Ψок - угол между осью системы координат, связанной с корпусом скважинного прибора и направлением на север;
φ - текущий угол между системой координат, связанной с корпусом скважинного прибора и приборной системой координат скважинного прибора;
Ψо - угол в азимутальной плоскости между осями приборной системы координат скважинного прибора и осями географической системы координат.
Одним существенным отличием предлагаемого способа является то, что начальную азимутальную ориентацию осуществляют при вертикальном положении скважинного прибора, путем определения значения угла отклонителя в системе координат, связанной с корпусом скважинного прибора. Следующим существенным отличием является то, что первоначально, на устье скважины устанавливают антенны спутниковой угломерной навигационной аппаратуры в произвольное фиксированное направление в азимутальной плоскости, причем перпендикуляр к оси, проходящей через фазовые центры антенн спутниковой угломерной навигационной аппаратуры, располагают вертикально, по показаниям спутниковой угломерной навигационной аппаратуры фиксируют значение угла курса Ψ, а затем замещают антенны спутниковой угломерной навигационной аппаратуры, скважинным прибором, причем располагают его вертикально в фиксированном направлении, ранее выбранном при установке антенн спутниковой угломерной навигационной аппаратуры. Другим существенным отличием является то, что в программное обеспечение гироскопического инклинометра вводят значение угла курса Ψ как значение угла отклонителя, и в результате программного расчета получают значения параметров начального положения системы координат скважинного прибора относительно географической системы координат по формулам:
где Ψ - угол между направлением на север и осью, проходящей через фазовые центры антенн спутниковой угломерной навигационной аппаратуры или угол курса спутниковой угломерной навигационной аппаратуры или угол отклонителя;
Ψок - угол между осью системы координат, связанной с корпусом скважинного прибора и направлением на север;
φ - текущий угол между системой координат, связанной с корпусом скважинного прибора и приборной системой координат скважинного прибора;
Ψо - угол в азимутальной плоскости между осями приборной системы координат скважинного прибора и осями географической системы координат.
В соответствии со способом предложено устройство начальной азимутальной ориентации скважинного прибора непрерывного гироскопического инклинометра, содержащее зажим, в конструкцию согласно изобретению, дополнительно введены система спутниковой угломерной навигационной аппаратуры, состоящая из основного блока, индикатора и антенн, разнесенных относительно друг друга, основание с зажимом и упорными винтами, корпус устройства ориентации, установленный в зажим, опорная стойка, два однотипных ориентирующих наконечника, один из которых закреплен на скважинном приборе, второй закреплен на одном из концов опорной стойки, на другом конце которой с помощью крепления установлены две антенны спутниковой угломерной навигационной аппаратуры, причем ось, соединяющая их фазовые центры, перпендикулярна продольной оси опорной стойки, а в корпусе устройства ориентации установлена заглушка с ориентирующим пазом для поочередной однозначной фиксации в ней с помощью ориентирующих наконечников скважинного прибора и опорной стойки с закрепленными антеннами спутниковой угломерной навигационной аппаратуры.
Одним существенным отличием предлагаемого устройства является то, что в него дополнительно введены система спутниковой угломерной навигационной аппаратуры, состоящая из основного блока, индикатора и антенн, разнесенных относительно друг друга, основание с упорными винтами, корпус устройства ориентации, опорная стойка, два однотипных ориентирующих наконечника, один из которых закреплен на скважинном приборе, а второй закреплен на одном из концов опорной стойки, на другом конце которой с помощью крепления установлены две антенны спутниковой угломерной навигационной аппаратуры, причем ось, соединяющая их фазовые центры, перпендикулярна продольной оси опорной стойки, а в корпусе устройства ориентации установлена заглушка с ориентирующим пазом для поочередной однозначной фиксации в ней с помощью ориентирующих наконечников скважинного прибора и опорной стойки с закрепленными антеннами спутниковой угломерной навигационной аппаратуры. Другим существенным отличием является то, что в зажим устанавливается корпус устройства ориентации с заглушкой.
Сущность изобретений поясняется чертежами, приведенными на фиг.1-5, где фиг.1 - диаграмма углов;
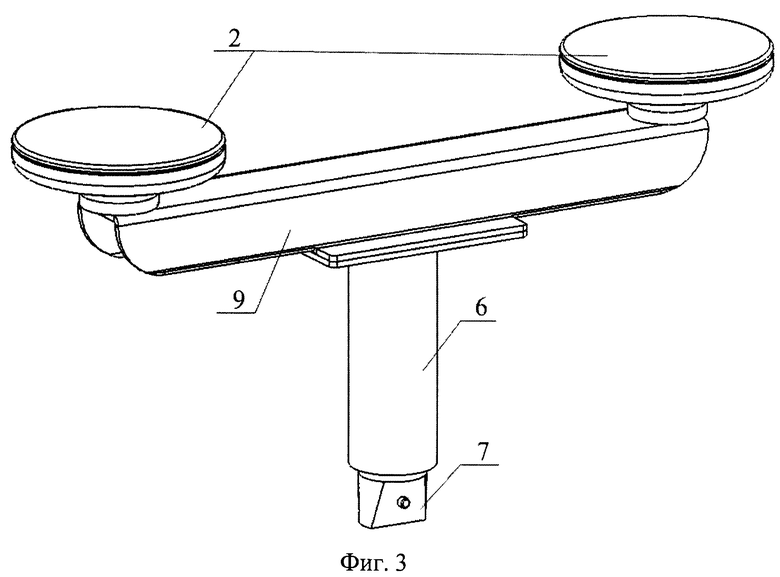
фиг.2 - устройство начальной азимутальной ориентации (узел 1);
фиг.3 - устройство начальной азимутальной ориентации (узел 2);
фиг.4 - устройство начальной азимутальной ориентации (узел 3);
фиг.5 - сопряжение элементов устройства начальной азимутальной ориентации.
На чертежах введены следующие обозначения:
1 - зажим;
2 - антенна спутниковой угломерной навигационной аппаратуры (СУНА);
3 - основание;
4 - упорные винты;
5 - корпус устройства ориентации;
6 - опорная стойка;
7 - ориентирующий наконечник;
8 - скважинный прибор гироинклинометра;
9 - крепление;
10 - заглушка.
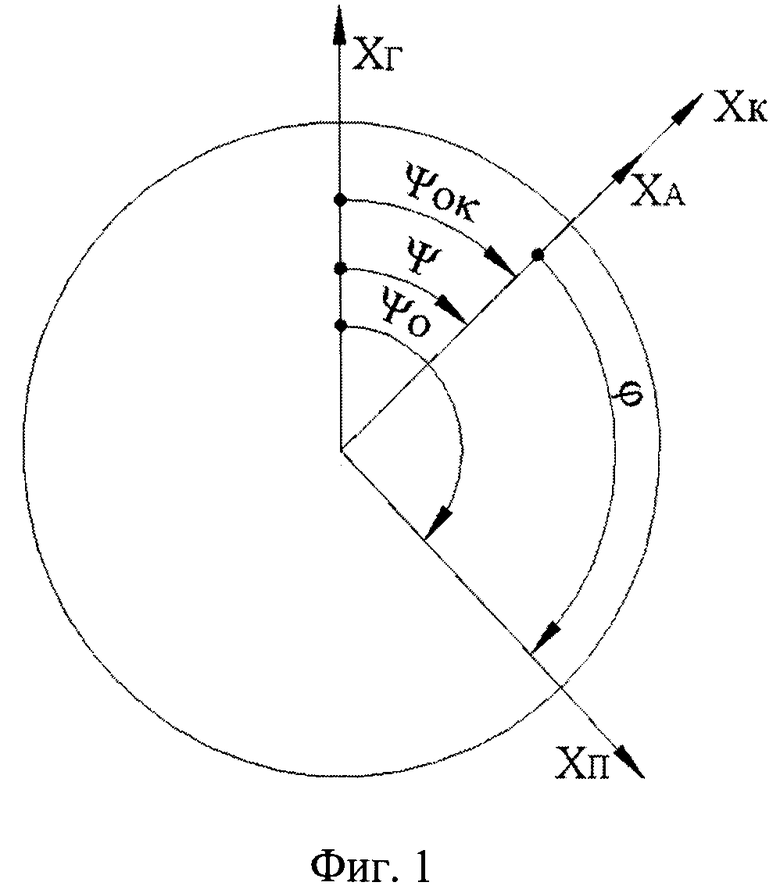
Оси систем координат, принятые на фиг.1, имеют следующие обозначения:
ХГ - ось географической системы координат, ориентирована на север;
ХА - ось, соединяющая фазовые центры антенн СУНА;
ХК - ось системы координат, связанной с корпусом скважинного прибор;
ХП - ось приборной системы координат.
Для пояснения существа изобретения, особенностей операций способа и работы устройства приняты следующие обозначения:
Ψ - угол между направлением на север и осью, проходящей через фазовые центры антенн СУНА или угол курса СУНА или угол отклонителя, [град];
Ψок - угол между осью системы координат, связанной с корпусом скважинного прибора и направлением на север;
φ - текущий угол между системой координат, связанной с корпусом скважинного прибора и приборной системой координат скважинного прибора, [град];
Ψо - угол в азимутальной плоскости между осями приборной системы координат скважинного прибора и осями географической системы координат, [град].
Специфика работы алгоритмов непрерывного гироинклинометра такова, что непосредственно перед началом измерения траектории скважины (спуском прибора) необходимо выполнить начальную азимутальную ориентацию скважинного прибора непрерывного гироинклинометра, содержащего гироплатформу, на которой установлены: два акселерометра, измерительные оси которых перпендикулярны друг другу и продольной оси скважинного прибора; двухкомпонентный индикаторный трехстепенной гироскоп, ось кинетического момента которого перпендикулярна плоскости гироплатформы и совпадает с измерительной осью одного из акселерометров, а также СКТ для определения углового положения гироплатформы, причем ротор СКТ связан с гироплатформой, а статор - с корпусом скважинного прибора.
Современное развитие спутниковых технологий и конструкция инклинометра, обеспечивающая непрерывный метод измерения, предоставляют уникальную возможность реализовать простой и технологичный способ начальной азимутальной ориентации по внешним данным. Для этого предлагается использовать возможности СУНА, обрабатывающей сигналы глобальной навигационной спутниковой системы.
Изучение рынка СУНА показало, что данное оборудование представлено в большом разнообразии, имеет высокую точность.
Цель начальной азимутальной ориентации скважинного прибора, содержащего гироплатформу, заключается в определении положения осей приборной системы координат скважинного прибора относительно осей географической системы координат, причем приборную систему координат скважинного прибора определяют оси датчиков первичной информации, которые установлены на гироплатформе. Таким образом, начальная азимутальная ориентация гироинклинометра состоит в определении угла в азимутальной плоскости между направлением на север и осью приборной системы координат - Ψо (см. фиг.1).
В основе предлагаемого способа начальной азимутальной ориентации лежит идея ориентации осей приборной системы координат скважинного прибора относительно фиксированной в каком-либо определенном положении апсидальной плоскости. В предлагаемом способе начальной азимутальной ориентации за данную апсидальную плоскость принята вертикальная плоскость, образованная осями системы координат, связанной с корпусом скважинного прибора. Положение системы координат, связанной с корпусом скважинного прибора, относительно географической системы координат, угол Ψок (см. фиг.1), определяют, используя СУНА, причем угол Ток принимается равным углу курса СУНА, т.е. углу Ψ (см. фиг.1).
Согласно предлагаемому способу начальной выставки, необходимо определить положение системы координат, связанной с корпусом скважинного прибора, относительно приборной системы координат скважинного прибора - φ (см. фиг.1). Значение данного угла определяют через показания с СКТ.
Для реализации предложенного способа разработано устройство начальной азимутальной ориентации, содержащее три узла, два из которых используются поочередно, обеспечивая сопряжение с третьим.
Первый узел устройства, показанный на фиг.2, содержит зажим 1, основание 3 с упорными винтами 4, корпус устройства ориентации 5 с заглушкой 10. На корпусе устройства ориентации 5 фиксируют зажим 1, причем форма внутренней поверхности зажима 1 позволяет жестко зафиксировать корпус устройства ориентации 5 и исключить возможность его вращения. Затем устанавливают корпус устройства ориентации 5 с зажимом 1 в основание 3, как показано на фиг.2.
Второй узел устройства начальной азимутальной ориентации, показанный на фиг.3, содержит опорную стойку 6, на одном конце которой закреплен ориентирующий наконечник 7, на другом конце установлено крепление 9 с двумя антеннами СУНА 2, причем ось, соединяющая их фазовые центры, перпендикулярна продольной оси опорной стойки 6. Для того чтобы обеспечить высокую точность начальной азимутальной ориентации, необходимо разнести антенны СУНА 2 на расстояние около метра.
Третий узел устройства, показанный на фиг.4, содержит скважинный прибор 8 гироинклинометра и закрепленный на нем ориентирующий наконечник 7.
Форма ориентирующего наконечника 7, обеспечивает при установке его в заглушку 10 сопряжение деталей по ребру А ориентирующего паза заглушки, как показано на фиг.5. Вертикальная плоскость, проходящая через ребро А паза заглушки, служит апсидальной плоскостью, положение которой требуется определить согласно предлагаемому способу. Данное конструктивное решение также обеспечивает однозначную фиксацию в вертикальном положении второго и третьего узла в корпусе устройства ориентации 5. Поскольку сопряжение деталей происходит по ребру А, то исключается необходимость строго контроля зенитного угла скважинного прибора 8.
В реальных полевых условиях на скважине предложенные изобретения реализуются следующим образом:
- собирают узлы устройства начальной азимутальной ориентации, как показано на фиг.2-4;
- на устье скважины располагают первый узел устройства, причем основание 1 с помощью трех упорных винтов 4 жестко фиксируют на фланце скважины;
- в корпус устройства ориентации 5 однозначно устанавливают второй узел устройства, причем ориентирующий наконечник 7, закрепленный на опорной стойке 6, попадает в ориентирующий паз в заглушке 10, сопряжение деталей происходит по ребру А ориентирующего паза заглушки 10, как показано на фиг.5;
- включают СУНА в режим курсоуказания и фиксируют ее показания. Полученный при этом угол курса есть угол между направлением на север и осью, проходящей через фазовые центры антенн СУНА - Ψ. Величину данного угла запоминают как константу;
- извлекают второй узел устройства, предварительно отключив СУНА, и устанавливают на его место третий узел устройства, при этом ориентирующий наконечник 7, закрепленный на скважинном приборе гироинклинометра 8, попадает в ориентирующий паз в заглушке 10, сопряжение деталей происходит по ребру А ориентирующего паза заглушки 10, как показано на фиг.5;
- вводят в рабочую программу гироинклинометра значение угла Ψ в качестве значения угла отклонителя скважинного прибора;
- рабочая программа считывает показания СКТ и определяет угол между системой координат, связанной с корпусом скважинного прибора и приборной системой координат скважинного прибора, угол φ (см. фиг.1);
- по завершении начальной азимутальной ориентации в результате программного расчета получают значения параметров начального положения системы координат скважинного прибора относительно географической системы координат по формулам:

где Ψ - угол между направлением на север и осью, проходящей через фазовые центры антенн СУНА или угол курса СУНА или угол отклонителя;
Ψок - угол между осью системы координат, связанной с корпусом скважинного прибора и направлением на север;
φ - текущий угол между системой координат, связанной с корпусом скважинного прибора и приборной системой координат скважинного прибора;
Ψо - угол в азимутальной плоскости между осями приборной системы координат скважинного прибора и осями географической системы координат.
- при переходе к измерению скважины на ориентирующий наконечник, установленный на скважинном приборе, устанавливают крышку с целью защиты от механического повреждения во время измерения траектории ствола скважины.
Предлагаемый способ начальной азимутальной ориентации и устройство, его осуществляющее, позволяют обеспечить требуемую точность определения пространственного положения оси ствола скважины, вне зависимости от широты места; уменьшить объем и трудоемкость работ по юстировке прибора; повысить оперативность получения инклинометрической информации; уменьшить экономические потери нефтегазодобывающих компаний от простоя скважины; вести перспективные разработки с целью создания высокоточного малогабаритного непрерывного гироинклинометра диаметром от 42 мм с неограниченными по диапазону углами измерения.
По сравнению со способом ближайшего аналога, в предлагаемом способе скважинный прибор при начальной азимутальной ориентации располагают вертикально, а не горизонтально, причем отсутствует необходимость строгого контроля зенитного угла. Фиксация прибора в вертикальном положении позволяет значительно уменьшить габаритные размеры устройства начальной азимутальной ориентации по сравнению с устройством ближайшего аналога. Также, предлагаемая конструкция устройства начальной азимутальной ориентации позволяет использовать его для разных типоразмеров гироинклинометров. Таким образом, предлагаемое устройство для осуществления способа начальной азимутальной ориентации обеспечивает удобство в обслуживании и транспортировании устройства, т.е. расширяет его эксплуатационные возможности.
Источники информации
1. Патент РФ №2159331, Е21В 47/022, 1999 г.
2. Патент РФ №2433262, Е21В 47/022, 2010 г.
3. Патент РФ (полезная модель) №98472, Е21В 47/01, 2010 г.
4. Исаченко, В.Х. Инклинометрия скважин /В.Х.Исаченко. - Москва: Недра, 1987, - 216 с. - С.182.


Предложенная группа изобретений относится к способу и устройству начального азимутального ориентирования скважинного прибора, в частности гироинклинометра. Техническим результатом является повышение точности начальной азимутальной ориентации, расширение области применения и повышение технико-экономических показателей гироинклинометра. Предложенный способ заключается в том, что начальную азимутальную ориентацию осуществляют при вертикальном положении скважинного прибора путем определения значения угла отклонителя в системе координат, связанной с корпусом скважинного прибора. При этом на устье скважины устанавливают антенны спутниковой угломерной навигационной аппаратуры (СУНА) и фиксируют значение угла курса ψ. Затем замещают антенны скважинным прибором, включают гироскопический инклинометр и вводят в программное обеспечение гироинклиномета значение угла курса ψ как значение угла отклонителя. В результате программного расчета получают значения параметров начального положения системы координат скважинного прибора относительно географической системы координат. Предложенное устройство содержит систему СУНА, основание с упорными винтами, корпус с заглушкой, опорную стойку и два однотипных ориентирующих наконечника на скважинном приборе и опорной стойке. 2 н.п. ф-лы, 5 ил.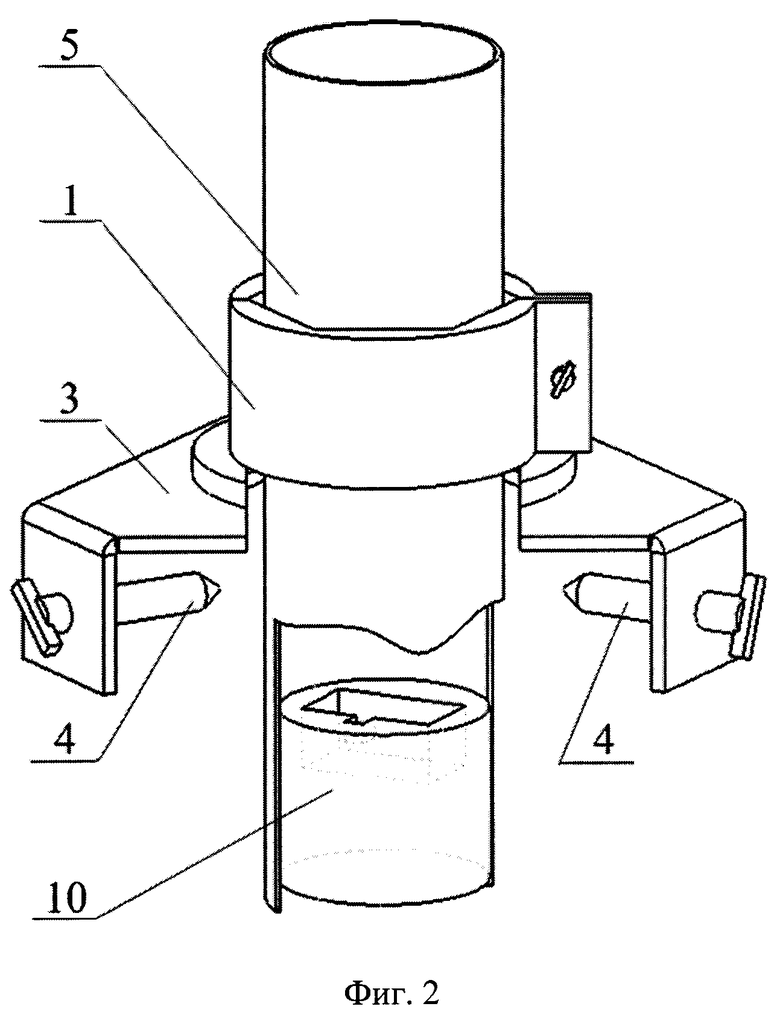
1. Способ начальной азимутальной ориентации скважинного прибора непрерывного гироскопического инклинометра, заключающийся в определении ориентации системы координат, связанной с корпусом скважинного прибора, и приборной системы координат скважинного прибора относительно географической системы координат с использованием спутниковой угломерной навигационной аппаратуры, отличающийся тем, что начальную азимутальную ориентацию осуществляют при вертикальном положении скважинного прибора путем определения значения угла отклонителя в системе координат, связанной с корпусом скважинного прибора, для чего на устье скважины устанавливают антенны спутниковой угломерной навигационной аппаратуры в произвольное фиксированное направление в азимутальной плоскости, причем перпендикуляр к оси, проходящей через фазовые центры антенн спутниковой угломерной навигационной аппаратуры, располагают вертикально, по показаниям спутниковой угломерной навигационной аппаратуры фиксируют значение угла курса ψ, затем замещают антенны спутниковой угломерной навигационной аппаратуры скважинным прибором, причем располагают его вертикально в фиксированном направлении, ранее выбранном при установке антенн спутниковой угломерной навигационной аппаратуры, включают гироскопический инклинометр, вводят в программное обеспечение гироскопического инклинометра значение угла курса ψ, как значение угла отклонителя, и в результате программного расчета получают значения параметров начального положения системы координат скважинного прибора относительно географической системы координат по формулам:
ψок=ψ, ψо=φ+ψок;
где ψ - угол между направлением на север и осью, проходящей через фазовые центры антенн спутниковой угломерной навигационной аппаратуры, или угол курса спутниковой угломерной навигационной аппаратуры, или угол отклонителя;
ψок - угол между осью системы координат, связанной с корпусом скважинного прибора и направлением на север;
φ - текущий угол между системой координат, связанной с корпусом скважинного прибора и приборной системой координат скважинного прибора;
ψo - угол в азимутальной плоскости между осями приборной системы координат скважинного прибора и осями географической системы координат.
2. Устройство для начальной азимутальной ориентации скважинного прибора непрерывного гироскопического инклинометра, содержащее зажим, отличающееся тем, что в него дополнительно введены система спутниковой угломерной навигационной аппаратуры, состоящая из основного блока, индикатора и антенн, разнесенных относительно друг друга, основание с зажимом и упорными винтами, корпус устройства ориентации, установленный в зажим, опорная стойка, два однотипных ориентирующих наконечника, один из которых закреплен на скважинном приборе, второй закреплен на одном из концов опорной стойки, на другом конце которой с помощью крепления установлены две антенны спутниковой угломерной навигационной аппаратуры, причем ось, соединяющая их фазовые центры, перпендикулярна продольной оси опорной стойки, а в корпусе устройства ориентации установлена заглушка с ориентирующим пазом для поочередной однозначной фиксации в ней с помощью ориентирующих наконечников скважинного прибора и опорной стойки с закрепленными антеннами спутниковой угломерной навигационной аппаратуры.
| СПОСОБ КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS (ВАРИАНТЫ) И ПОВЕРОЧНАЯ ИНКЛИНОМЕТРИЧЕСКАЯ УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS | 2010 |
|
RU2433262C1 |
| ИСАЧЕНКО В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.182-184, рис.79 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| US 7346455 B2, 18.03.2008 | |||
| CN 202081882 U, 21.12.2011 | |||
| ПЕРВОВСКИЙ B.C., БИНДЕР Я.И | |||
| Азимутальная выставка гироинклинометров для скважин произвольной ориентации с использованием GPS-компаса | |||
| Научно-технический вестник | |||

