По данной заявке испрашивается приоритет на основании заявки на патент Китая № 200910171349.0, озаглавленной «Способ, система и устройство для управления отклонением крюка» и поданной в Китайское государственное ведомство интеллектуальной собственности 27 августа 2009 года, содержание которой полностью включено в данное описание в качестве ссылки.
Область техники, к которой относится изобретение
Настоящая заявка относится к технической области грузоподъемных кранов и конкретно относится к способу для управления колебанием крюка, к системе для управления колебанием крюка и к устройству для управления колебанием крюка, чтобы регулировать угол отклонения крюка во время работы грузоподъемного крана с телескопической стрелой.
Описание предшествующего уровня техники
Грузоподъемный кран с телескопической стрелой представляет собой вид широко применяемого грузоподъемного оборудования. Автомобильный кран и вездеходный кран оба являются хорошо известными типами грузоподъемных кранов с телескопической стрелой. Грузоподъемный кран с телескопической стрелой имеет такие преимущества, как хорошую проходимость, хорошую мобильность, высокую скорость перемещения и быструю передачу, и таким образом является все более и более широко используемым в различных конструкциях.
Грузоподъемный кран с телескопической стрелой обычно имеет телескопическую стрелу, поворотный стол, который может поворачиваться в горизонтальной плоскости, трос, лебедку, электродвигатель для намотки, цилиндр подъема или опускания стрелы крана и т.д. Поворотный стол приводится в действие поворотным двигателем, при этом закрепленный конец стрелы крана неподвижно соединен с поворотным столом. Трос со своим закрепленным концом, намотанным вокруг лебедки, и со своим свободным концом, снабженным крюком для подъема груза, выполнен вдоль стрелы крана. Электродвигатель для намотки может приводить во вращение лебедку, при этом вращение вперед и обратное вращение лебедки может управлять натяжением и ослаблением троса. Стрела крана снабжена на участке основания крана цилиндром подъема или опускания стрелы крана, при этом растяжение и втягивание цилиндра подъема или опускания стрелы крана может регулировать угол подъема стрелы крана. Когда необходимо поднять груз, грузоподъемный кран с телескопической стрелой работает, чтобы растянуть стрелу своего крана, повернуть поворотный стол и управлять лебедкой, так чтобы крюк на свободном конце троса поравнялся с грузом и зацепил груз, затем трос натягивают, регулируют цилиндр подъема или опускания стрелы крана, при этом поворотный стол поворачивается, так что груз может быть поднят в требуемое положение.
Во время процесса подъема грузов краном с телескопической стрелой крюк обычно качается, таким образом, трудно выполнить некоторые операции по подъему и опусканию груза, которые требуют высокой точности. Если крюк качается сильно, он будет угрожать безопасности персонала и имущества.
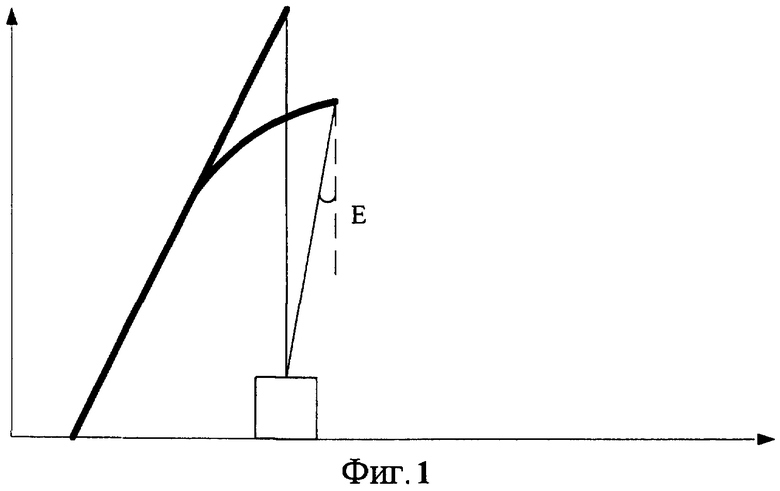
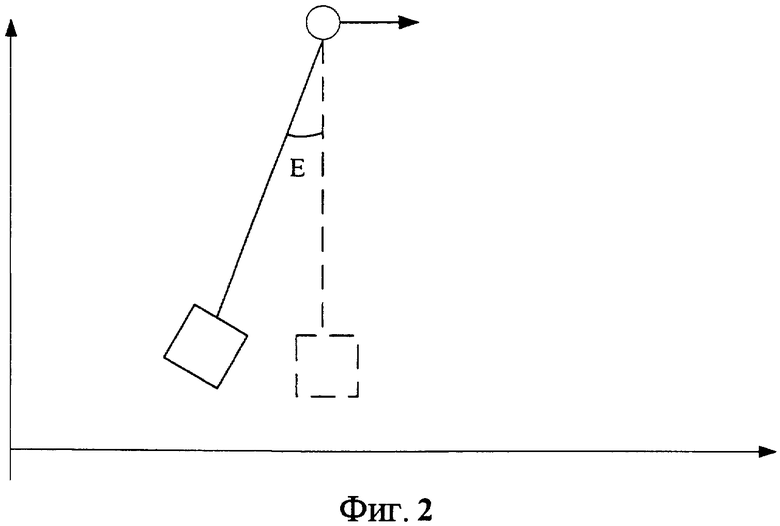
Крюк качается в различных видах при разных рабочих условиях, при этом качание крюка главным образом включает в себя продольное качание, поперечное качание и сложное качание. Продольное качание означает, что крюк качается вперед и назад в плоскости, которая состоит из стрелы крана и вылета стрелы крана в горизонтальной плоскости. Как показано на фиг.1, во время подъема или опускания груза груз поднимается или опускается не вертикально из-за визуальной ошибки оператора или изгибающей деформации стрелы крана, и таким образом крюк и груз качаются в продольном направлении. Поперечное качание означает главным образом, что крюк качается в левом направлении и правом направлении стрелы крана. Как показано на фиг.2, когда краном с телескопической стрелой управляют, чтобы поворачивать, крюк качается в левом направлении и правом направлении стрелы крана, обусловленном неправильным заданием приводного ускорения или тормозного ускорения. Сложное качание означает, что крюк качается и в продольном направлении, и в поперечном направлении, что является результатом различных рабочих условий и операций. Какой угодно вид качания будет подвергать риску безопасный и точный подъем и опускание крана с телескопической стрелой.
В настоящее время для некоторых операций с высоким стандартом и высокой точностью по подъему и опусканию груза они главным образом зависят от того, как опытный оператор внимательно и осторожно управляет краном с телескопической стрелой, при этом процесс сталкивается с потенциальной опасностью травмирования, обусловленной слишком большой надеждой на человеческий фактор во время управления краном.
Сущность изобретения
Задачей изобретения является создание способа для управления качанием крюка с помощью которого можно с высокой скоростью и точностью регулировать угол отклонения крюка крана с телескопической стрелой. Еще одной задачей является создание системы для управления качанием крюка. Еще одной задачей является создание устройства для управления качанием крюка.
Для решения первой задачи предложен способ управления качанием крюка для регулирования угла отклонения крюка крана с телескопической стрелой, при этом способ включает в себя следующие этапы:
А. определение угла отклонения и направления качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести;
В. определение превышения углом отклонения заданного значения, причем после этапа В приступают к этапу С, если угол отклонения больше, чем заданное значение, и после этапа В приступают к этапу А, если угол отклонения меньше, чем заданное значение;
С. осуществление компенсационного управления качанием крюка на основе угла отклонения и направления качания.
Угол отклонения предпочтительно представляет собой продольный угол отклонения.
Предпочтительно, чтобы этап осуществления компенсационного управления углом отклонения крюка на основе угла отклонения и направления раскачивания включал в себя регулирование угла подъема стрелы крана, причем увеличение угла подъема стрелы крана, если направление качания является положительным, и уменьшение угла подъема стрелы крана, если направление качания является отрицательным.
Предпочтительно, чтобы этап осуществления компенсационного управлении углом отклонения крюка на основе угла отклонения и направления качания включал в себя ослабление троса, если направление качания является положительным, и натяжение троса, если направление качания является отрицательным.
Предпочтительно, чтобы угол отклонения являлся поперечным углом отклонения.
Предпочтительно, чтобы этап осуществления компенсационного управления углом отклонения крюка на основе угла отклонения и направления качания включал в себя поворот поворотного стола в направлении качания.
Способ для управления качанием крюка согласно настоящей заявке включает в себя следующие этапы: А. определение угла отклонения и направления качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести; В. сравнение обнаруженного угла отклонения с заданным значением, причем этап В предшествует этапу С, если угол отклонения больше, чем заданное значение, и этап В предшествует этапу А, если угол отклонения меньше, чем заданное значение, и С. осуществление компенсационного управления углом отклонения крюка на основе угла отклонения и направления качания. В способе для управления качанием крюка согласно настоящей заявке используется способ, в котором распознают угол отклонения и направление качания троса в горизонтальном направлении, чтобы распознать угол отклонения крюка и сравнить значение обнаруженного угла отклонения с заданным стандартным значением, для того чтобы определить, попадает ли угол отклонения крюка в пределы диапазона нормальной ошибки, и соответствующим образом осуществить компенсационное управление углом отклонения крюка уравновешивающим образом на основе обнаруженного угла отклонения и направления качания, если угол отклонения крюка находится за заданным стандартным значением, так чтобы угол отклонения крюка попадал в пределы диапазона нормальной ошибки.
Таким способом для управления отклонением крюка можно с высокой точностью и скоростью обнаружить угол отклонения и направление качания крюка, при этом можно осуществить компенсационное управление углом отклонения крюка на основе обнаруженного угла отклонения и направления раскачивания, и таким образом можно избежать ситуации, при которой оператор субъективно регулирует угол отклонения крюка согласно своему восприятию и опыту, что сокращает потенциальную угрозу безопасности, обусловленную слишком большой надеждой на человеческий фактор во время операций по подъему и опусканию груза. С такого рода способом для управления качанием крюка, некоторые операции по подъему и опусканию груза, которые требуют высокого стандарта и высокой точности, могут быть выполнены, при этом безопасность и степень умного управления работой крана с телескопической стрелой сами по себе повышаются.
Для решения второй задачи предложена система для управления качанием крюка, которая включает в себя: блок обнаружения, выполненный с возможностью обнаружения угла отклонения и направления качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести, и передачи сигнала угла отклонения и сигнала направления качания; блок управления, выполненный с возможностью приема сигнала угла отклонения и сигнала направления качания и определения, является ли угол отклонения большим, чем заданное значение, а также передачи сигнала управления, если угол отклонения больше, чем заданное значение; блок регулирования, выполненный с возможностью приема сигнала управления для осуществления компенсационного управления угла отклонения крюка. В блоке управления применяют упомянутый выше способ для управления качанием крюка в качестве стратегии управления, таким образом, система для управления качанием крюка, в которой применен способ для управления качанием крюка в качестве стратегии управления, имеет соответствующие положительные эффекты, что и способ для управления качанием крюка.
Блок регулирования предпочтительно может включать в себя:
блок регулирования поворотного стола, выполненный с возможностью регулирования направления вращения и скорости вращения поворотного стола;
блок регулирования троса, выполненный с возможностью регулирования натяжения и ослабления троса; и
блок регулирования стрелы крана, выполненный с возможностью регулирования угла подъема стрелы крана.
Предпочтительно, чтобы система для управления качанием крюка дополнительно включала в себя блок измерения скорости вращения для поворотного стола, который выполнен с возможностью измерения скорости вращения поворотного стола и передачи сигнала скорости вращения, при этом блок управления дополнительно выполнен с возможностью приема сигнала скорости вращения и определения, является ли измеренная скорость вращения большей, чем заданная скорость вращения, и управления скоростью вращения поворотного стола, чтобы она была меньше, чем заданная скорость вращения, если измеренная скорость вращения больше, чем заданная скорость вращения.
Предпочтительно, чтобы система для управления качанием крюка дополнительно включала в себя блок измерения углового ускорения для поворотного стола, который выполнен с возможностью измерения углового ускорения поворотного стола и передачи сигнала углового ускорения, при этом дополнительно блок управления выполнен с возможностью приема сигнала углового ускорения и определения, является ли измеренное угловое ускорение большим, чем заданное угловое ускорение, и управления угловым ускорением поворотного стола, чтобы оно было меньше, чем заданное угловое ускорение, если измеренное угловое ускорение больше, чем заданное угловое ускорение.
Для решения третьей задачи предложено устройство для управления качанием крюка, которое включает в себя устройство обнаружения угла отклонения, контроллер, клапан, регулирующий подъем и опускание стрелы крана, для управления цилиндром подъема и опускания стрелы крана и поворотный электродвигатель. Устройство обнаружения угла отклонения выполнено на тросе в головке стрелы крана, при этом выходные терминалы сигнала угла отклонения и сигнала направления качания устройства обнаружения угла отклонения соединены с принимающими терминалами сигнала угла отклонения и сигнала направления качания контроллера, при этом терминалы управления контроллера соединены, соответственно, с терминалом управления клапаном, регулирующим подъем и опускание стрелы, и терминалом управления поворотного электродвигателя.
Предпочтительно, чтобы устройство для управления качанием крюка дополнительно включало в себя электродвигатель для намотки, выполненный с возможностью приведения во вращение поворотного стола, и электромагнитный клапан управления намоткой, выполненный с возможностью управления направлением вращения и скоростью вращения электродвигателя для намотки, при этом терминал управления электромагнитного клапана управления намоткой соединен с терминалом управления контроллера.
Предпочтительно, чтобы устройство для управления качанием крюка дополнительно включало в себя датчик скорости вращения, выполненный на поворотном столе крана с телескопической стрелой, при этом выходной терминал сигнала скорости вращения датчика скорости вращения соединен с входным терминалом сигнала скорости вращения контроллера.
Предпочтительно, чтобы устройство для управления качанием крюка дополнительно включало в себя датчик углового ускорения, выполненный на поворотном столе крана с телескопической стрелой, при этом выходной терминал сигнала углового ускорения датчика углового ускорения соединен с входным терминалом сигнала углового ускорения контроллера.
Предпочтительно, чтобы устройство обнаружения угла отклонения для троса являлось датчиком двойного наклона.
Устройство обнаружения угла отклонения может определять угол отклонения и направление качания троса, соединенного с крюком, и может передавать обнаруженный сигнал угла отклонения и обнаруженный сигнал направления качания на контроллер. Контроллер принимает сигнал угла отклонения и сигнал направления качания, чтобы определить, является ли обнаруженный угол отклонения большим, чем заданное значение, и управляет регулирующим подъем и опускание стрелы клапаном и поворотным двигателем, чтобы осуществить соответствующие действия, если угол отклонения больше, чем заданное значение, с тем чтобы добиться компенсационного управления углом отклонения крюка.
Устройство для управления качанием крюка такого рода может обнаружить угол отклонения и направление качания крюка быстро и точно, а также может осуществлять компенсационное управление углом отклонения крюка на основе обнаруженного угла отклонения и направления раскачивания, и таким образом избегать ситуации, при которой оператор субъективно регулирует угол отклонения крюка в соответствии со своим ощущением и опытом, что сокращает потенциальную угрозу безопасности, обусловленную слишком большой надеждой на человеческий фактор во время операций подъема и опускания груза. С такого рода устройством для управления качанием крюка могут быть выполнены некоторые операции по подъему и опусканию груза, которые требуют высокого стандарта и высокой точности, при этом безопасность и степень умного управления работой крана с телескопической стрелой повышаются сами по себе.
Краткое описание чертежей
Фиг.1 представляет собой схематичный вид продольного качания крюка;
Фиг.2 представляет собой схематичный вид поперечного качания крюка;
Фиг.3 представляет собой блок-схему конкретного варианта осуществления способа для управления качанием крюка согласно настоящему изобретению;
Фиг.4 представляет собой блок-схему другого конкретного варианта осуществления способа для управления качанием крюка согласно настоящему изобретению;
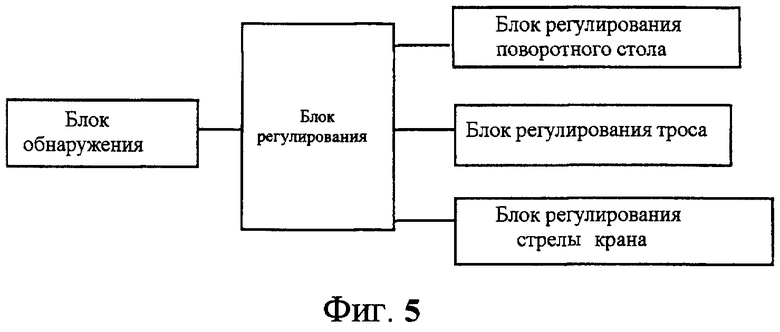
Фиг.5 представляет собой чертеж принципиальной схемы системы для управления качанием крюка согласно настоящей заявке, и
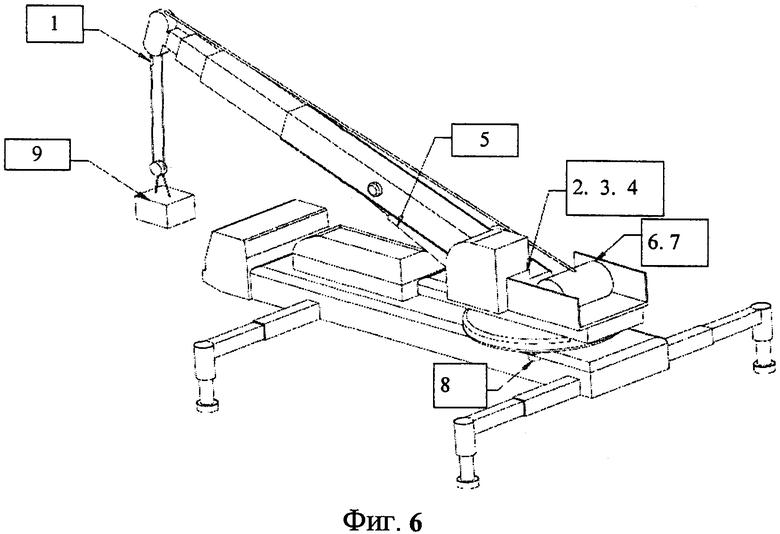
Фиг.6 представляет собой структурный схематичный вид устройства для управления качанием крюка согласно настоящей заявке,
при этом на фиг.1-6:
1 - устройство обнаружения угла отклонения для троса;
2 - контроллер;
3 - датчик углового ускорения;
4 - датчик скорости вращения;
5 - клапан, регулирующий подъем и опускание стрелы крана;
6 - электродвигатель намотки;
7 - электромагнитный клапан управления намоткой;
8 - поворотный двигатель;
9 - груз.
Подробное описание вариантов осуществления изобретения
Первым объектом настоящего изобретения является способ для управления качанием крюка, с помощью которого можно быстро и с высокой точностью регулировать угол отклонения крюка крана с телескопической стрелой. Вторым объектом является система для управления качанием крюка. Третьим объектом является устройство для управления качанием крюка.
Настоящее изобретение в дальнейшем будет описано совместно с чертежами, при этом нижеследующее описание является только иллюстративным и поясняющим, и не должно быть интерпретировано как ограничивающее объем защиты по настоящей заявке.
Способ для управления качанием крюка согласно настоящей заявке выполнен с возможностью регулировки угла отклонения крюка грузоподъемного крана с телескопической стрелой. Способом для управления качанием крюка можно регулировать продольное качание, поперечное качание, и сложное качание крюка, при этом способ будет пояснен с помощью нижеследующих вариантов осуществления настоящего изобретения.
Способ управления качанием крюка согласно настоящей заявке будет описан для случая, когда регулируется продольное качание крюка крана с телескопической стрелой.
Как видно на фиг.3, фиг.3 представляет собой блок-схему конкретного варианта осуществления настоящего способа для управления качанием крюка согласно настоящей заявке.
Как показано на фиг.3, способ для управления качанием крюка согласно настоящей заявке включает в себя:
Этап 101, обнаружение угла отклонения и направления качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести.
В некоторых условиях эксплуатации крюк крана с телескопической стрелой может качаться в продольном направлении. Как показано на фиг.1, когда груз, который подлежит подъему, имеет большой вес, или стрела крана имеет большую длину, стрела крана может становиться изогнутой во время подъема. В это время амплитуда подъема крана больше, чем амплитуда в начале подъема, приводя к углу отклонения, образованному между и тросом и направлением силы тяжести, при этом направление качания троса в это время считают положительным. При опускании груза стрела крана постепенно возвращается к своему прямому состоянию во время процесса опускания груза, что сокращает подъемный радиус крана, и таким образом между тросом и направлением силы тяжести образуется угол отклонения, направление качания троса в это время считают отрицательным.
Допуская, что горизонтальная плоскость, которая является перпендикулярной к направлению силы тяжести, является стандартной плоскостью, в горизонтальной плоскости определяют направление качания и угол отклонения продольного качания троса, который соединен с крюком.
На этапе 102 определяют, является ли угол отклонения большим, чем заданное значение. Если угол отклонения больше, чем заданное значение, процесс переходит к этапу 103, при этом, если угол отклонения меньше, чем заданное значение, процесс переходит к этапу 101.
Пороговое значение Е0 ошибки для угла отклонения устанавливают заранее, если угол отклонения крюка меньше, чем пороговое значение Е0 ошибки, он показывает, что отклонение крюка находится в пределах диапазона ошибки в это время, и поэтому нет необходимости регулировать качание крюка; если угол отклонения крюка больше, чем пороговое значение Е0 ошибки, он показывает, что отклонение крюка находится за пределами разрешенного диапазона ошибки и необходимо выполнить компенсационное управление качанием крюка, так чтобы угол отклонения попал в границы диапазона ошибки.
Регистрируемый угол отклонения сравнивают с заданным пороговым значением Е0 ошибки, чтобы определить, является ли обнаруженный угол отклонения большим, чем заданное пороговое значение Е0 ошибки. Если обнаруженный угол отклонения больше, чем заданное пороговое значение Е0 ошибки, процесс переходит к этапу 103, а если обнаруженный угол отклонения меньше, чем заданное пороговое значение Е0 ошибки, процесс переходит к этапу 101.
На этапе 103 производят регулирование угла подъема стрелы крана на основе угла отклонения и направления качания.
Во время подъема груза, поскольку стрела крана становится изогнутой во время подъема груза и таким образом подъемный радиус увеличивается, образуется положительный угол отклонения. Поэтому требуется компенсировать увеличение подъемного радиуса путем уменьшения подъемного радиуса. Во время опускания груза, поскольку стрела крана постепенно возвращается в свое прямое состояние во время операция опускания, и таким образом подъемный радиус уменьшается, образуется отрицательный угол отклонения. Поэтому требуется компенсировать уменьшение подъемного радиуса путем увеличения подъемного радиуса.
Угол подъема стрелы крана может быть отрегулирован на основе обнаруженных угла отклонения и направления качания. Угол подъема стрелы крана увеличивают, если обнаруженное направление качания крюка является положительным, которое может уменьшить подъемный радиус, чтобы компенсировать увеличение подъемного радиуса, и таким образом сократить положительный угол отклонения крюка. Угол подъема стрелы крана уменьшают, если обнаруженное направление качания крюка является отрицательным, которое может увеличить подъемный радиус, чтобы компенсировать сокращение подъемного радиуса, и таким образом уменьшить отрицательный угол качания крюка.
В предпочтительном варианте одновременно с регулированием угла подъема стрелы крана можно управлять тросом, ослабляя или натягивая его, путем управления намоткой лебедки для компенсирования подъемного радиуса и выполнения подъема и опускания груза.
Вышеупомянутый вариант осуществления настоящего изобретения описывает способ для управления качанием крюка согласно настоящей заявке, взяв в качестве примера случай, в котором регулируют продольное качание крюка. Следующий вариант осуществления настоящего изобретения будет описывать способ для управления качанием крюка согласно настоящей заявке, взяв в качестве примера случай, в котором регулируют поперечное качание крюка.
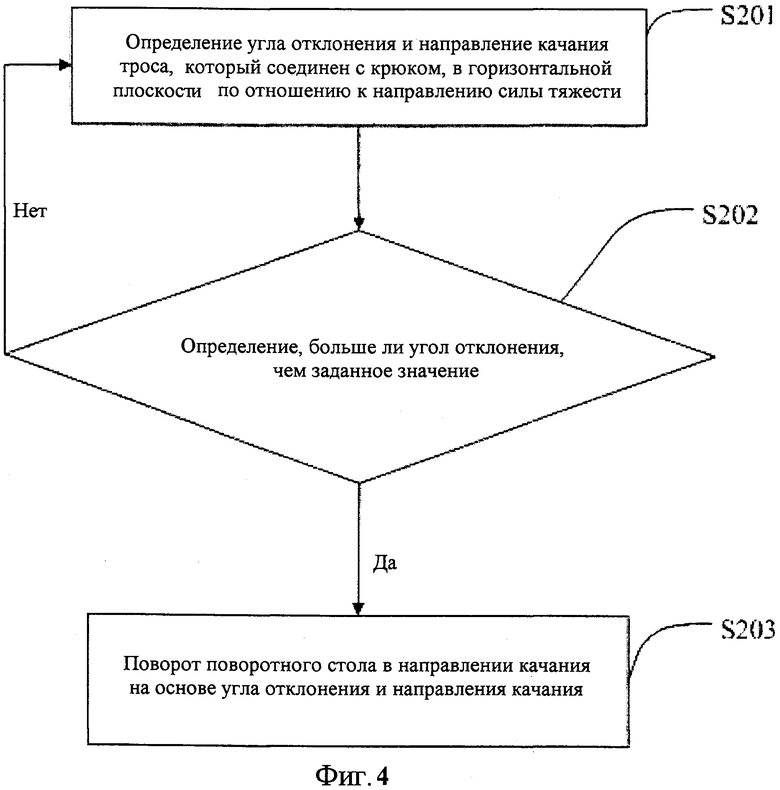
Фиг.4 представляет собой блок-схему другого конкретного варианта осуществления настоящего способа для управления качанием крюка согласно настоящей заявке.
Как показано на фиг.4, способ для управления качанием крюка согласно настоящей заявке включает в себя:
Этап 201, обнаружение угла отклонения и направления качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести.
При некоторых рабочих условиях крюк крана с телескопической стрелой может качаться в поперечном направлении. Как показано на фиг.2, когда кран с телескопической стрелой поворачивается, запуск, остановка, скорость вращения и ускорение, приводящие к изменению в скорости вращения, могут вызывать поперечное качание крюка, имеющего поперечный угол отклонения. Крюк может качаться в поперечном направлении по часовой стрелке и против часовой стрелки. Предполагают, что качание крюка по часовой стрелке является положительным в направлении качания, при этом качание крюка против часовой стрелки является отрицательным в направлении качания.
Предположив, что горизонтальная плоскость, которая перпендикулярна направлению силы тяжести, является стандартной плоскостью, в горизонтальной плоскости определяют направление качания и угол отклонения поперечного качания троса, который соединен с крюком.
На этапе 202 определяют, является ли угол отклонения большим, чем заданное значение. Если угол отклонения больше, чем заданное значение, процесс переходит к этапу 203, при этом, если угол отклонения меньше, чем заданное значение, процесс переходит к этапу 201.
Пороговое значение Е0 ошибки для угла отклонения устанавливают заранее, если угол отклонения крюка меньше, чем пороговое значение Е0 ошибки, он показывает, что качание крюка находится в пределах диапазона ошибки в это время и не существует необходимости регулировать качание крюка; если угол раскачивания крюка больше, чем пороговое значение Е0 ошибки, он показывает, что качание крюка находится за пределами разрешенного диапазона ошибки, и необходимо осуществить компенсационное управление качанием крюка, так чтобы качание крюка попадало в диапазон ошибки.
Регистрируемый угол отклонения сравнивают с заданным пороговым значением Е0 ошибки, чтобы определить, является ли обнаруженный угол большим, чем заданное пороговое значение Е0 ошибки. Если обнаруженный угол отклонения больше, чем заданное пороговое значение Е0 ошибки, процесс переходит к этапу 203, а если обнаруженный угол отклонения меньше, чем заданное пороговое значение Е0 ошибки, процесс переходит к этапу 201.
На этапе 203 производят поворот поворотного стола в направлении качания на основе угла отклонения и направления качания.
При торможении поворотного действия крана груз может качаться в положительном или отрицательном направлении за пределы порогового значения Е0 разрешенной ошибки для угла отклонения, обусловленного его силой инерции.
Поворотный стол может быть повернут в обнаруженном направлении качания на основе обнаруженных угла отклонения и направления качания. Поворотный стол поворачивают в текущем направлении качания крюка, если направление качания крюка является положительным, при этом поворотный стол также поворачивают в текущем направлении качания крюка, если направление качания крюка является отрицательным, которое может эффективно компенсировать качание крюка, являющееся результатом инерции, и может автоматически и быстро привести крюк в устойчивое состояние.
В предпочтительном варианте, для того чтобы управлять качанием крюка при запуске, остановке или ускорении поворотного стола, можно измерить скорость вращения и угловое ускорение поворотного стола. Обнаруженные скорость вращения и угловое ускорение поворотного стола могут быть сравнимы с разрешенными стандартными скоростью вращения и угловым ускорением. Если обнаруженные скорость вращения и угловое ускорение поворотного стола превышают разрешенные стандартные скорость вращения и угловое ускорение, скоростью вращения и угловым ускорением поворотного стола управляют таким образом, чтобы скорость вращения и угловое ускорение поворотного стола были меньше, чем разрешенные стандартные скорость вращения и угловое ускорение, таким образом поворотный стол может быть запущен, остановлен или ускорен плавно, насколько это возможно, так что угол отклонения крюка может быть стабилизирован.
С помощью способа для управления качанием крюка согласно настоящей заявке также можно управлять сложным качанием крюка.
Крюк может качаться не в единственном направлении из-за сложных операций по подъему и опусканию груза краном с телескопической стрелой. Угол отклонения сложного раскачивания может быть разделен на продольный угол отклонения и поперечный угол отклонения и управляться способами для управления качанием крюка в описанных выше вариантах осуществления настоящего изобретения раздельно или одновременно, так что сложное качание крюка может быть стабилизировано или устранено. Процесс управления не будет описан здесь подробно.
Далее будут описаны положительные эффекты способа для управления качанием крюка согласно настоящей заявке.
Способом для управления качанием крюка согласно настоящей заявке можно обнаруживать угол отклонения и направление качания крюка быстро и точно, и можно осуществлять компенсационное управление углом отклонения крюка на основе обнаруженных угла отклонения и направления качания, чтобы избежать ситуации, при которой оператор субъективно регулирует угол отклонения крюка согласно своему ощущению и опыту, и который может сократить потенциальную угрозу безопасности, обусловленную слишком большой надеждой на человеческий фактор во время операций по подъему и опусканию груза. Такого рода способом для управления качанием крюка могут быть выполнены некоторые грузоподъемные операции и операции по опусканию груза, которые требуют высокого стандарта исполнения и высокой точности, при этом безопасность и степень умного управления операциями крана с телескопической стрелой повышаются сами по себе.
В настоящей заявке дополнительно предложена система для управления качанием крюка, которая будет описана далее со ссылками на чертежи.
Фиг.5 представляет собой чертеж принципиальной схемы системы для управления качанием крюка согласно настоящей заявке.
Как показано на фиг.5, система для управления качанием крюка согласно настоящей заявке включает в себя:
блок обнаружения, выполненный с возможностью обнаружения угла отклонения и направления качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести и передачи сигнала угла отклонения и сигнала направления качания;
блок управления, выполненный с возможностью приема сигнала угла отклонения и сигнала направления качания и определения, является ли угол отклонения большим, чем заданное значение, и передачи сигнала управления, если угол отклонения больше, чем заданное значение;
блок регулирования, выполненный с возможностью приема сигнала управления для осуществления компенсационного управления углом отклонения крюка.
Блок регулирования конкретно может включать в себя блок регулирования стрелы крана, блок регулирования троса и блок регулирования поворотного стола.
Блок регулирования поворотного стола выполнен с возможностью регулирования направления вращения и скорости вращения поворотного стола. Блок регулирования троса выполнен с возможностью регулирования натяжения и ослабления троса. Блок регулирования стрелы крана выполнен с возможностью регулирования угла подъема стрелы крана.
Блок обнаружения обнаруживает угол отклонения и направление качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести и передает сигнал угла отклонения и сигнал направления качания на контроллер. Контроллер принимает сигнал угла отклонения и сигнал направления качания и определяет, является ли угол отклонения большим, чем заданное значение, при этом передает сигнал управления, если угол отклонения больше, чем заданное значение. Блок регулирования принимает сигнал управления и затем осуществляет компенсационное управление углом отклонения крюка. В системе для управления качанием крюка согласно настоящей заявке применяют способы для управления качанием крюка, упомянутые в вышеприведенных вариантах осуществления настоящего изобретения, в качестве стратегии управления, которая не будет описана подробно.
В предпочтительном варианте система для управления качанием крюка согласно настоящей заявке дополнительно включает в себя блок измерения скорости вращения для поворотного стола, который выполнен с возможностью измерения скорости вращения поворотного стола и передачи сигнала скорости вращения. Блок управления дополнительно выполнен с возможностью приема сигнала скорости вращения и определения, является ли измеренная скорость вращения большей, чем заданная скорость вращения, и контроля скорости вращения поворотного стола, которая должна быть меньше, чем заданная скорость вращения, если измеренная скорость вращения больше, чем заданная скорость вращения.
В предпочтительном варианте система для управления качанием крюка согласно настоящей заявке дополнительно включает в себя блок измерения углового ускорения для поворотного стола, который выполнен с возможностью измерения углового ускорения поворотного стола и передачи сигнала углового ускорения. Блок управления дополнительно выполнен с возможностью приема сигнала углового ускорения и определения, является ли измеренное угловое ускорение большим, чем заданное угловое ускорение, и управления угловым ускорением поворотного стола, которое должно быть меньше, чем заданное угловое ускорение, если измеренное угловое ускорение больше, чем заданное угловое ускорение.
На основе вышеупомянутых способа для управления качанием крюка и системы для управления качанием крюка в настоящей заявке дополнительно предложено устройство для управления качанием крюка.
Ссылаясь на фиг.6, фиг.6 представляет собой структурный схематичный вид устройства для управления качанием крюка согласно настоящей заявке.
Как показано на фиг.6, устройство для управления качанием крюка согласно настоящей заявке включает в себя устройство определения угла отклонения для троса 1, контроллер 2, клапан 5, регулирующий подъем и опускание стрелы крана, для управления цилиндром подъема и опускания стрелы крана и поворотный электродвигатель 8.
Устройство обнаружения угла отклонения для троса 1 выполнено на тросе, на головке стрелы крана. Выходные терминалы сигнала угла отклонения и сигнала направления качания устройства обнаружения угла отклонения для троса 1 соединены с принимающими терминалами сигнала угла отклонения и сигнала направления качания контроллера 2, при этом терминалы управления контроллера 2 соединены соответственно с терминалом управления клапана 5, регулирующего подъем и опускание стрелы, и терминалом управления поворотного электродвигателя 8.
В предпочтительном варианте устройство для управления качанием крюка согласно настоящей заявке дополнительно включает в себя электродвигатель 6 для намотки, выполненный с возможностью приведения во вращение поворотного стола, и электромагнитный клапан 7 управления намоткой, выполненный с возможностью управления направлением вращения и скоростью вращения электродвигателя 6 для намотки. Терминал управления электромагнитного клапана 7 управления намоткой соединен с терминалом управления контроллера 2.
В конкретном варианте осуществления настоящего изобретения устройство обнаружения угла отклонения для троса 1 может быть датчиком двойного наклона, который может одновременно определять угол продольного отклонения и угол поперечного отклонения троса и может одновременно передавать два обнаруженных сигнала.
Принцип работы устройства для управления качанием крюка согласно настоящей заявке описан ниже.
Устройство определения угла отклонения для троса 1 выявляет угол отклонения и направление качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести и передает сигнал угла отклонения и сигнал направления качания на контроллер 2. Контроллер 2 принимает сигнал угла отклонения и сигнал направления качания и передает сигнал управления на регулирующий клапан 5 подъема и опускания стрелы крана, если угол отклонения является углом продольного отклонения и больше, чем заданное значение, затем регулирующий клапан 5 подъема и опускания стрелы крана управляет цилиндром подъема и опускания стрелы крана для натяжения, чтобы увеличить угол подъема стрелы крана, если направление качания является положительным, при этом регулирующий клапан 5 подъема и опускания стрелы крана управляет цилиндром подъема и опускания стрелы крана для втягивания, чтобы уменьшить угол подъема стрелы крана, если направление качания является отрицательным. Если угол отклонения является углом поперечного отклонения, который больше, чем заданное значение, контроллер 2 передает сигнал управления на поворотный электродвигатель 8, который в свою очередь запускает поворотный стол, чтобы поворачиваться в направлении качания.
В предпочтительном варианте контроллер 2 на основе полученного сигнала угла отклонения и сигнала направления качания управляет электромагнитным клапаном 7 управления намоткой и электродвигателем 6 намотки, чтобы управлять направление вращения и скоростью вращения лебедки, с тем чтобы натягивать и ослаблять трос.
В предпочтительном варианте устройство для управления качанием крюка согласно настоящей заявке дополнительно включает в себя датчик 4 скорости вращения, выполненный на поворотном столе крана с телескопической стрелой. Выходной терминал сигнала скорости вращения датчика 4 скорости вращения соединен с входным терминалом сигнала скорости вращения контроллера 2. Датчик 4 скорости вращения определяет скорость вращения поворотного стола и передает сигнал скорости вращения на контроллер 2. Контроллер 2 принимает сигнал скорости вращения и сравнивает обнаруженную скорость вращения с заданным значением, при этом управляет поворотным электродвигателем 8, чтобы скорость вращения была меньше, чем заданное значение, если обнаруженная скорость вращения больше, чем заданное значение.
В предпочтительном варианте устройство для управления качанием крюка по настоящей заявке дополнительно включает в себя датчик 3 углового ускорения, выполненный на поворотном столе крана с телескопической стрелой. Выходной терминал сигнала углового ускорения датчика 3 углового ускорения соединен с входным терминалом сигнала углового ускорения контроллера 2, датчик 3 углового ускорения определяет угловое ускорение поворотного стола и передает сигнал углового ускорения на контроллер 2. Контроллер 2 принимает сигнал углового ускорения и сравнивает обнаруженное угловое ускорение с заданным значением, при этом управляет поворотным электродвигателем 8, чтобы угловое ускорение было меньше, чем заданное значение, если обнаруженное угловое ускорение больше, чем заданное значение.
Устройство для управления качанием крюка согласно настоящей заявке основано на вышеупомянутых способах для управления качанием крюка и системе для управления качанием крюка. Таким образом, устройство для управления качанием крюка также имеет те же самые положительные эффекты, что и вышеупомянутые способы для управления качанием крюка и система для управления качанием крюка, и которые не будут подробно описаны здесь.
Вышеупомянутые варианты осуществления настоящего изобретения являются только предпочтительными вариантами осуществления настоящего изобретения согласно настоящей заявке. Следует отметить, что специалист в данной области техники также может выполнить усовершенствования, модификации и изменения, не выходя за рамки принципа настоящей заявки, например режущее кольцо может быть частью соответствующей трубы и к тому же может быть отдельным составляющим элементом с высокой износостойкостью, при этом эти усовершенствования, модификации и изменения должны быть расценены как подпадающие под объем защиты настоящей заявки.
Изобретение относится к области обеспечения безопасности эксплуатации подъемных кранов. При управлении качанием крюка для регулирования угла отклонения крюка крана с телескопической стрелой определяют угол отклонения и направление качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести, причем угол отклонения является поперечным углом отклонения. Определяют превышение углом отклонения заданного значения. Если угол отклонения больше, чем заданное значение, вращают поворотный стол в направлении качания и измеряют скорость вращения и угловое ускорение поворотного стола. Сравнивают измеренные значения скорости вращения и углового ускорения поворотного стола с разрешенными стандартными значениями скорости вращения и углового ускорения. Если измеренные значения скорости вращения и углового ускорения поворотного стола превышают разрешенные значения стандартных скорости вращения и углового ускорения, управляют скоростью вращения и угловым ускорением поворотного стола таким образом, чтобы скорость вращения и угловое ускорение поворотного стола было меньше, чем разрешенные стандартные скорость вращения и угловое ускорение. Достигается повышение безопасности. 3 н. и 5 з. п. ф-лы, 6 ил.
1. Способ управления качанием крюка для регулирования угла отклонения крюка крана с телескопической стрелой, в котором:
А. определяют угол отклонения и направление качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести, причем угол отклонения является поперечным углом отклонения;
В. определяют превышение углом отклонения заданного значения, причем после этапа В приступают к этапу С, если угол отклонения больше, чем заданное значение, и после этапа В приступают к этапу А, если угол отклонения меньше заданного значения;
С. вращают поворотный стол в направлении качания и измеряют скорость вращения и угловое ускорение поворотного стола, сравнивают измеренные значения скорости вращения и углового ускорения поворотного стола с разрешенными стандартными значениями скорости вращения и углового ускорения и если измеренные значения скорости вращения и углового ускорения поворотного стола превышают разрешенные значения стандартных скорости вращения и углового ускорения, управляют скоростью вращения и угловым ускорением поворотного стола таким образом, чтобы скорость вращения и угловое ускорение поворотного стола было меньше, чем разрешенные стандартные скорость вращения и угловое ускорение.
2. Система управления качанием крюка для регулирования угла отклонения крюка крана с телескопической стрелой, включающая:
блок обнаружения, выполненный с возможностью определения угла отклонения и направления качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести, и передачи сигнала угла отклонения и сигнала направления качания;
блок управления, выполненный с возможностью приема сигнала угла отклонения и сигнала направления качания и определения, является ли угол отклонения большим, чем заданное значение, и передачи сигнала управления, если угол отклонения больше, чем заданное значение;
блок регулирования, выполненный с возможностью приема сигнала управления для осуществления компенсационного управления углом отклонения крюка, и
блок измерения скорости вращения для поворотного стола, который выполнен с возможностью измерения скорости вращения поворотного стола и передачи сигнала скорости вращения, при этом блок управления дополнительно выполнен с возможностью приема сигнала скорости вращения и определения, является ли обнаруженная скорость вращения большей, чем заданная скорость вращения, и контроля скорости вращения поворотного стола, которая должна быть меньше, чем заданная скорость вращения, если измеренная скорость вращения больше, чем заданная скорость вращения.
3. Система по п. 2, в которой блок регулирования включает в себя:
блок регулирования поворотного стола, выполненный с возможностью регулирования направления вращения и скорости вращения поворотного стола;
блок регулирования троса, выполненный с возможностью регулирования натяжения и ослабления троса;
блок регулирования стрелы крана, выполненный с возможностью регулирования угла подъема стрелы крана.
4. Система по п. 2, дополнительно содержащая блок измерения углового ускорения для поворотного стола, который выполнен с возможностью измерения углового ускорения поворотного стола и передачи сигнала углового ускорения, при этом блок управления дополнительно выполнен с возможностью приема сигнала углового ускорения и определения, является ли измеренное угловое ускорение большим, чем заданное угловое ускорение, и управления угловым ускорением поворотного стола, которое должно быть меньше, чем заданное угловое ускорение, если измеренное угловое ускорение больше, чем заданное угловое ускорение.
5. Устройство для управления качанием крюка для регулирования угла отклонения крюка крана с телескопической стрелой, содержащее устройство определения угла отклонения для троса (1), контроллер (2), клапан (5), регулирующий подъем и опускание стрелы крана, для управления цилиндром подъема и опускания стрелы крана и поворотный электродвигатель (8), причем устройство обнаружения угла отклонения для троса (1) выполнено на тросе, на головке стрелы крана, при этом выходные терминалы сигнала угла отклонения и сигнала направления качания устройства определения угла отклонения для троса (1) соединены с принимающими терминалами сигнала угла отклонения и сигнала направления качания контроллера (2), при этом терминалы управления контроллера (2) соединены соответственно с терминалом управления клапана (5), регулирующего подъем и опускание стрелы, и терминалом управления поворотного электродвигателя (8), при этом указанное устройство для управления качанием крюка дополнительно содержит датчик (4) скорости вращения, выполненный на поворотном столе крана с телескопической стрелой, при этом выходной терминал сигнала скорости вращения датчика (4) скорости вращения соединен с входным терминалом сигнала скорости вращения контроллера (2).
6. Устройство по п. 5, дополнительно содержащее электродвигатель (6) для намотки, выполненный с возможностью приведения во вращение поворотного стола, и электромагнитный клапан (7) управления намоткой, выполненный с возможностью управления направлением вращения и скоростью вращения электродвигателя (6) для намотки, при этом терминал управления электромагнитного клапана (7) управления намоткой соединен с терминалом управления контроллера (2).
7. Устройство по п. 5, дополнительно содержащее датчик (3) углового ускорения, выполненный на поворотном столе крана с телескопической стрелой, при этом выходной терминал сигнала углового ускорения датчика (3) углового ускорения соединен с входным терминалом сигнала углового ускорения контроллера (2).
8. Устройство по любому из пп. 5-7, в котором устройство определения угла отклонения для троса (1) является датчиком двойного наклона.
| Колосоуборка | 1923 |
|
SU2009A1 |
| CN 101659379 A, 03.03.2010. | |||

