Настоящее изобретение относится к технике управления краном и, в частности, к устройству определения положения крюка и крану, включающему это устройство определения положения крюка.
Краны широко применяются как подъемное и транспортирующее оборудование в строительной промышленности, обрабатывающей промышленности и при портовой транспортировке. Существуют различные виды кранов, и каждый вид имеет свою конструкцию. Что касается автокрана, он включает шасси, поворотный механизм, подъемную стрелу, крюк и подъемный механизм. Подъемная стрела имеет нижнюю часть, соединенную с шасси поворотным механизмом, и верхнюю часть, на которой подвешен крюк при помощи проволочного каната, намотанного вокруг обоймы блока, соединенной с подъемным механизмом. В подъемном механизме крюк перемещается проволочным канатом для совершения подъема, остановки и снижения, в то время как подъемная стрела может вращаться вокруг вертикальной оси при помощи поворотного механизма для перемещения крюка в горизонтальной плоскости.
При операции подъема краном требуется выполнение многих этапов, которые обычно включают спуск крюка, подъем, боковое движение и последующий спуск крюка и т.д. При снижении крюка подъемный барабан подъемного механизма вращается в одном направлении, и крюк тянет проволочный канат вниз под действием силы тяжести, пока крюк не достигнет соответствующего положения над грузом, который требуется поднять, и затем крюк прикрепляют к грузу, который требуется поднять. При подъеме подъемный барабан подъемного механизма вращается в противоположном направлении, и крюк с грузом движутся совместно вверх натяжением проволочного каната, и, таким образом, груз поднимается от грунта. После подъема груза от грунта работает поворотный механизм, и начинается этап бокового движения. Подъемная стрела поворачивается в боковом направлении, и крюк движется в боковом направлении вместе с грузом, обеспечивая доставку груза в точку над заданным местоположением. При последующем снижении крюка подъемный барабан снова вращается в противоположном направлении после того, как груз оказывается над заданным местоположением, и груз и крюк перемещаются вниз, позволяя грузу достигать заданного положения, таким образом, выполняя перенос груза. При подъеме крюк движется не только в вертикальном направлении, но также и в боковом направлении. Из-за инерции и внешней силы крюк, висящий на верхней части подъемной стрелы на проволочном канате, и груз могут раскачиваться соответственно, в частности, когда крюк, несущий груз, начинает двигаться в боковом направлении или прекращает двигаться в боковом направлении после того, как груз достигает заданного положения, и амплитуда раскачивания крюка и груза может увеличиваться.
Раскачивание крюка может воздействовать на эффективность операции подъема краном. Когда крюк опускается, для поддержания стабильности крюка относительно груза и исключения столкновения между крюком и грузом необходимо выжидать в течение соответствующего промежутка времени, пока крюк не прекратит раскачиваться. При боковом движении поднятого груза, чтобы избежать столкновения, вызванного раскачиванием груза, также необходимо перемещать крюк и груз с относительно низкой скоростью. После того, как поднятый груз достигает заданного положения, чтобы точно разместить груз в заданном положении, также необходимо опускать крюк только когда груз прекратит раскачиваться. В настоящее время в области кранов существует общая проблема, состоящая в том, что время подъема увеличивается из-за раскачивания крюка, что понижает эффективность подъема краном.
Указанные выше проблемы происходят не только при операции подъема автокраном, но также и при операции подъема портальным краном или другими типами кранов.
Ввиду указанных выше проблем амплитуду раскачивания крюка в настоящее время уменьшают, принимая меры против раскачивания и для стабилизации крюка, чтобы быстрее остановить раскачивание крюка и, таким образом, уменьшать вредное влияние раскачивания крюка на эффективность операции подъема. В качестве меры против раскачивания и для стабилизации крюка обычно используется управляющее устройство для перемещения крюка с соответствующей частотой и амплитудой в направлении, противоположном направлению раскачивания, на основе амплитуды, частоты и направления раскачивания крюка, чтобы остановить крюк за более короткое время. В настоящее время меры против раскачивания и для стабилизации крюка по существу зависят от надлежащего управления крюком опытным оператором.
Для уменьшения зависимости от рабочего опыта оператора Европейский патентный документ EP1757554 описывает технику управления краном для предотвращения раскачивания. Согласно техническому решению, описанному в этом патентном документе, параметры положения крюка или груза предварительно определены в заданном режиме, и система управления принимает надлежащие меры против раскачивания в соответствии с заданными параметрами положения для уменьшения отрицательного воздействия раскачивания на операции подъема. Один принцип этого технического решения состоит в том, что ситуация перемещения крюка, то есть параметры положения крюка, при операции подъема предварительно заданы; и стратегия управления определяется в соответствии с заданными параметрами положения крюка, чтобы обеспечивать передвижение крюка заданным способом для уменьшения амплитуды раскачивания крюка и, таким образом, быстрее останавливать крюк, таким образом, уменьшая отрицательные воздействия раскачивания крюка на эффективность операции подъема. Однако из-за сложности фактической операции подъема трудно сделать заданные параметры положения крюка идентичными фактическим параметрам положения, и, таким образом, это техническое решение применимо только в устойчивой рабочей среде подъема. Когда операция подъема выполняется в рабочей среде, где параметры положения крюка не заданы, указанное выше техническое решение не будет увеличивать эффективность операции подъема краном.
При операции подъема одной технической трудностью в области кранов является определение фактических параметров положения крюка и образовать базис для управления перемещением крюка таким образом, чтобы увеличить эффективность операции подъема краном.
Ввиду указанной выше технической трудности первой задачей настоящего изобретения является обеспечение устройства определения положения крюка для определения фактических параметров положения крюка и образования базиса для управления перемещением крюка.
Второй задачей настоящего изобретения является обеспечение крана с указанным выше устройством определения положения крюка, в котором состояние перемещения крюка известно в соответствии с фактическими параметрами положения крюка, и могут быть предприняты меры по стабилизации крюка, чтобы увеличить эффективность операции подъема краном.
Для достижения первой упомянутой выше задачи устройство определения положения крюка в соответствии с настоящим изобретением содержит:
- инструмент для измерения угла, предназначенный для измерения угла между осью координат второй системы координат и соответствующей осью координат первой системы координат в режиме реального времени;
- измеритель ускорения, предназначенный для измерения ускорения крюка в заданном направлении в режиме реального времени, и, таким образом, получают заданный угол между заданным направлением и осью координат второй системы координат;
- процессор, предназначенный для создания первой системы координат и второй системы координат, причем первая система координат установлена относительно заданного положения, и вторая система координат установлена относительно крюка, при этом ось координат первой системы координат соответствует оси координат второй системы координат; и параметры положения крюка в первой системе координат могут быть получены на основе угла, измеренного инструментом для измерения угла, и ускорения, измеренного измерителем ускорения; и
- устройство вывода, предназначенное для выдачи параметров положения.
Предпочтительно, первая система координат представляет собой прямоугольную систему координат, включающую ось Х1, ось Y1 и ось Z1, и вторая система координат представляет собой прямоугольную систему координат, включающую ось X2, ось Y2 и ось Z2, причем ось Х1, ось Y1 и ось Z1 соответствуют оси X2, оси Y2 и оси Z2, соответственно.
Предпочтительно, инструмент для измерения угла представляет собой трехосный инструмент для измерения угла, и существуют заданные углы между осями трех измерительных валов трехосного инструмента для измерения угла и трех осей координат второй системы координат, соответственно.
Предпочтительно, все заданные углы между осями трех измерительных валов трехосного инструмента для измерения угла и тремя осями координат второй системы координат равны нулю градусов.
Предпочтительно, измеритель ускорения представляет собой трехосный измеритель ускорения, и существуют заданные углы между осями трех измерительных валов трехосного измерителя ускорения и тремя осями координат второй системы координат, соответственно.
Предпочтительно, все заданные углы между осями трех измерительных валов измерителя ускорения и тремя осями координат второй системы координат равны нулю градусов.
Предпочтительно, устройство вывода включает индикаторное устройство, которое отображает параметры положения в форме схематического изображения.
Предпочтительно, параметры положения включают, по меньшей мере, одно из мгновенной скорости, направления перемещения и положения крюка в первой системе координат.
Предпочтительно, процессор также может сравнивать параметры положения с заданными пороговыми значениями параметров для определения безопасности операции подъема и может выполнять заданную обработку в соответствии с результатом сравнения.
Для достижения второй упомянутой выше цели кран в соответствии с настоящим изобретением включает корпус крана, подвесной проволочный канат и крюк, причем подвесной проволочный канат имеет нижний конец, соединенный с крюком, и верхний конец, соединенный с неподвижным блоком на корпусе крана, и отличается от известного уровня техники тем, что он также включает любое упомянутое выше устройство определения положения крюка, в котором инструмент для измерения угла и измеритель ускорения устройства определения положения крюка оба прикреплены к подвесному проволочному канату или к крюку.
В устройстве определения положения крюка в соответствии с настоящим изобретением процессор устанавливает первую систему координат и вторую систему координат в пространстве и получает параметры положения крюка на основе этих двух систем координат, чтобы знать состояние перемещения крюка. Первая система координат зафиксирована относительно заданного положения, которое может быть определено относительно соответствующих частей крана, и вторая система координат связана с перемещением крюка таким образом, что состояние перемещения крюка может быть отражено относительным состоянием перемещения между этими двумя системами координат. Инструмент для измерения угла используется для измерения угла между осью координат второй системы координат и соответствующей осью координат первой системы координат. Измеритель ускорения используется для измерения ускорения крюка в заданном направлении, установленном относительно второй системы координат и проходящем под заданным углом относительно оси координат второй системы координат, для образования базиса для измерения ускорения крюка в направлении каждой оси координат второй системы координат. Процессор также может получать ускорения крюка по соответствующим осям координат первой системы координат в соответствии с ускорением, измеренным измерителем ускорения, и угол, измеренный инструментом для измерения угла; и может получать параметры положения крюка в соответствии с ускорениями крюка по соответствующим осям координат первой системы координат для определения состояния перемещения крюка. Тогда параметры положения, полученные процессором, могут быть выданы устройством вывода соответствующим образом. Указанное выше устройство определения положения крюка в соответствии с настоящим изобретением может определять параметры положения крюка, и, таким образом, система управления краном или оператор могут владеть точной информацией о положении, рабочей скорости и амплитуде раскачивания крюка на основе параметров положения, выданных устройством вывода, для определения состояния перемещения крюка, и затем принять соответствующие стабилизирующие крюк меры в соответствии с состоянием перемещения крюка для уменьшения времени, требуемого для операции подъема, и улучшения эффективности операции подъема.
Согласно другому техническому решению первая система координат и вторая система координат обе являются прямоугольными системами координат, включающими три оси координат. Согласно такому техническому решению может быть получено больше параметров положения крюка при помощи эти трех осей координат. Кроме того, система управления краном или оператор могут более точно определять информацию о крюке в трехмерном пространстве и лучше принимать меры по стабилизации крюка.
Согласно другому техническому решению углы между соответствующими осями координат этих двух систем координат получают при помощи трехосного устройства для измерения угла. Таким образом, с одной стороны, точность измерений может быть увеличена, и, с другой стороны, данные углов могут быть получены более быстро, таким образом, улучшая скорость реагирования устройства определения положения крюка. Согласно предпочтительному техническому решению, оси трех измерительных валов трехосного инструмента для измерения угла соответственно параллельны трем осям координат второй системы координат, что может сократить этапы обработки инструментом для измерения угла и улучшить скорость обработки инструментом для измерения угла.
Подобно этому, согласно другому техническому решению, данные ускорения крюка в каждом направлении получают при помощи трехосного измерителя ускорения, который может улучшить точность измерений и скорость реагирования устройства определения положения крюка. Согласно предпочтительному техническому решению оси трех измерительных валов трехосного измерителя ускорения соответственно параллельны трем осям координат второй системы координат, что может снижать этапы обработки измерителя ускорения и улучшать скорость обработки измерителя ускорения.
Согласно другому техническому решению устройство вывода включает индикаторное устройство, при помощи которого параметры положения крюка могут отображаться в форме схематического изображения. Это техническое решение может предоставлять визуализированную рабочую информацию для оператора таким образом, что оператор может лучше принимать стабилизирующие крюк меры для облегчения улучшения эффективности операции подъема.
Согласно другому техническому решению процессор может сравнивать полученные параметры положения крюка с заданными пороговыми значениями параметров и определять в соответствии с заданной стратегией, выходят ли положение и скорость крюка за пределы заданного диапазона или нет; и затем определяет, следует ли выполнять соответствующую обработку или нет в соответствии с результатом оценки; и выдает заданное указание, чтобы дополнительно напомнить оператору, если необходимо выполнять заданную обработку. Посредством этого технического решения эффективность операции подъема улучшается, при этом нарушения техники безопасности уменьшаются или исключаются.
На основе указанного выше устройства определения положения крюка настоящее изобретение также обеспечивает получение крана, включающего указанное выше устройство определения положения крюка. Так как устройство определения положения крюка дает указанные выше технические эффекты, кран, включающий указанное выше устройство определения положения крюка, также дает соответствующие технические эффекты.
Краткое описание чертежей
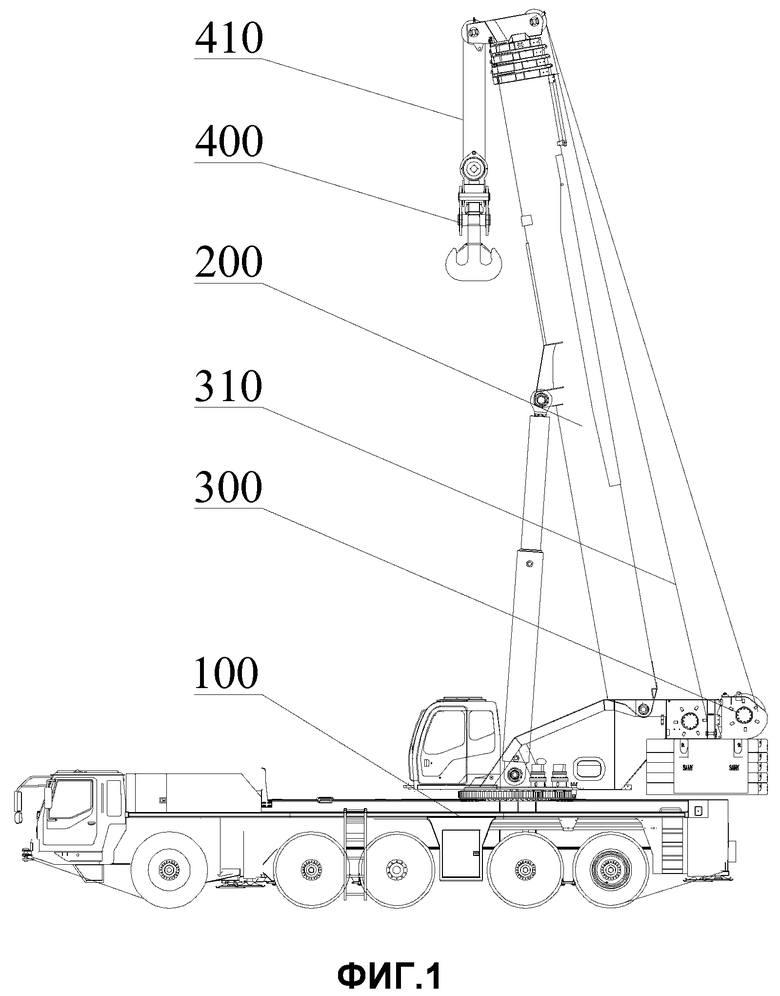
Фиг.1 - общий структурный схематический вид автокрана;
фиг.2 - структурная блок-схема устройства определения положения крюка в соответствии с первым вариантом осуществления настоящего изобретения;
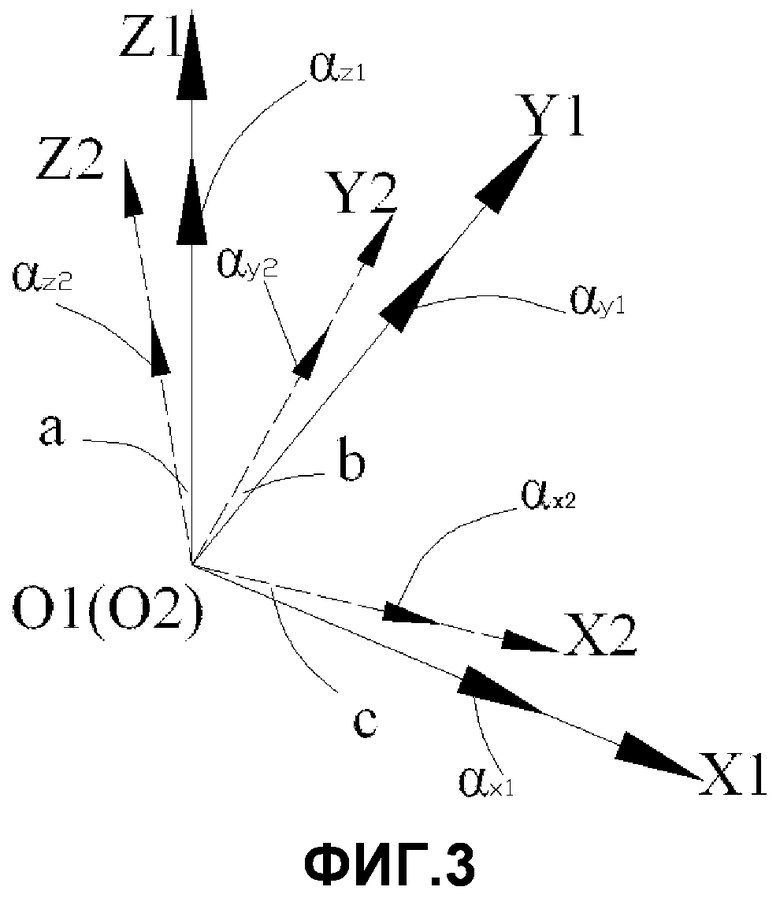
фиг.3 - схематический вид, показывающий соотношение положений между инструментом для измерения угла, измерителем ускорения и крюком в первом варианте осуществления изобретения;
фиг.4 - схематический вид, показывающий сравнение между первой системой координат и второй системой координат в первом варианте осуществления изобретения, где оси координат первой системы координат показаны сплошной линией, и оси координат второй системы координат показаны пунктиром; и
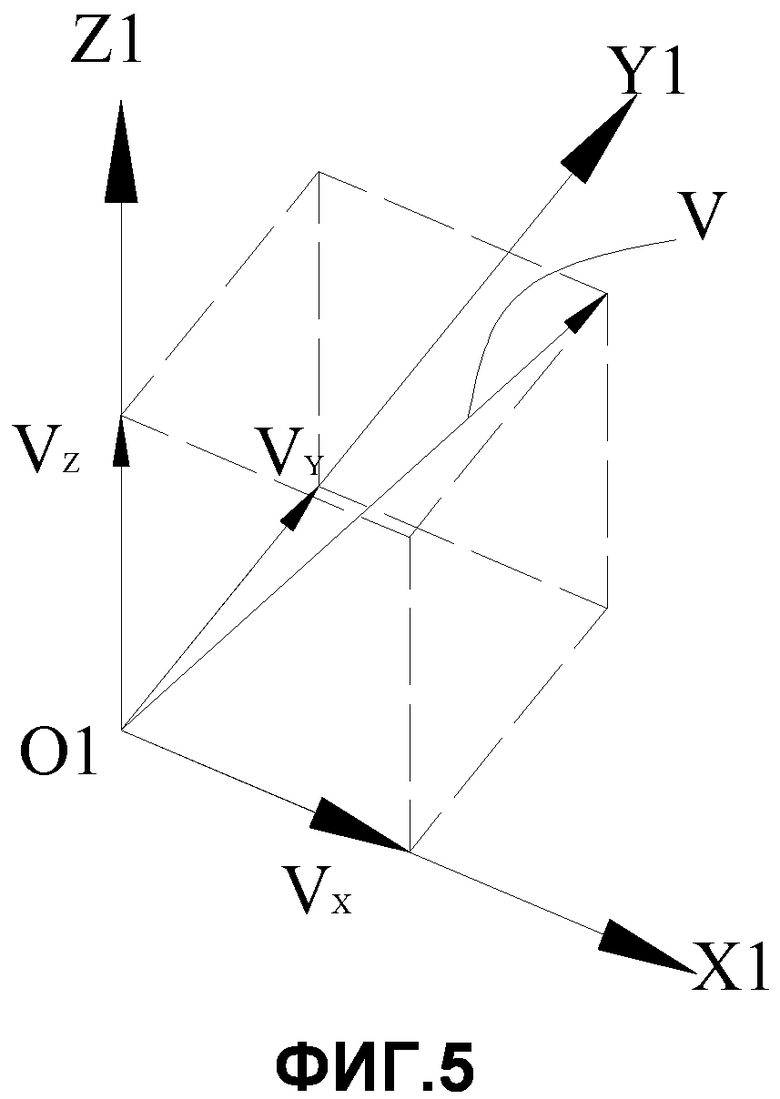
фиг.5 - схематический вид, показывающий результирующий вектор перемещения крюка в первом варианте осуществления изобретения.
Сущностью настоящего изобретения является создание первой системы координат и второй системы координат, причем вторая система координат связана с перемещением крюка, в то время как первая система координат независима от перемещения крюка, и, таким образом, изменение параметров положения крюка может быть отражено изменением соотношения положений между такими двумя системами координат; в таком случае угловое соотношение между осями координат этих двух систем координат измеряется инструментом для измерения угла, и ускорение крюка в заданном направлении второй системы координат измеряется измерителем ускорения, и, таким образом, ускорения крюка по соответствующим осям координат первой системы координат получают в соответствии с угловым соотношением и ускорением; наконец, параметры положения крюка в первой системе координат получают в соответствии с ускорениями крюка по осям координат первой системы координат для образования базиса для лучшего управления перемещением крюка.
Технические решения согласно настоящему изобретению будут описаны в дальнейшем посредством конкретных вариантов его осуществления. Описание в этом разделе описания является только иллюстративным и пояснительным и не должно рассматриваться как ограничивающее объем охраны настоящего изобретения.
На фиг.1 показан общий структурный схематический вид автокрана. Автокран на фиг.1 включает шасси 100, подъемную стрелу 200 и крюк 400. Подъемная стрела 200 установлена на шасси 100 при помощи поворотного механизма таким образом, что она может вращаться вокруг вертикальной оси в горизонтальной плоскости относительно шасси 100. Подвижный набор шкивов расположен на крюке 400 и связан с неподвижным набором шкивов на верхней части подъемной стрелы 200 подвесным проволочным канатом 410. Набор неподвижных шкивов соединен с подъемным барабаном 300 крана тянущим проволочным канатом 310. При операции подъема подвесной проволочный канат 410 приводится тянущим проволочным канатом 310 через набор неподвижных шкивов, и, таким образом, крюк 400 перемещается в вертикальном направлении, и поднятый груз перемещается в вертикальном направлении. Поворотный механизм между подъемной стрелой 200 и шасси 100 вращается при приведении соответствующим приводным механизмом, который перемещает подъемную стрелу 200 относительно шасси 100 и вызывает перемещение крюка 400 и поднятого груза в горизонтальной плоскости, и, таким образом, положение груза изменяется. Вращение подъемной стрелы 200 или внешняя сила могут вызывать раскачивание крюка 400, подвешенного на верхней части подъемной стрелы 200 подвесным проволочным канатом 410, в боковом направлении, и раскачивание в боковом направлении может неблагоприятно воздействовать на эффективность операции подъема краном.
На фиг.2 показана структурная блок-схема устройства определения положения крюка в соответствии с первым вариантом осуществления настоящего изобретения. Устройство определения положения крюка в соответствии с первым вариантом осуществления изобретения используется для измерения параметров положения указанного выше крюка крана и включает инструмент 510 для измерения угла, измеритель 520 ускорения, процессор 530 и устройство 540 вывода.
Процессор 530 может создать две системы координат в соответствии со структурными размерами крана, то есть первую систему О1 координат и вторую систему О2 координат с осями координат первой системы О1 координат, соответствующими осям координат второй системы О2 координат, соответственно. Первая система О1 координат и вторая система О2 координат установлены относительно различных устройств, соответственно. В частности, вторая система О2 координат установлена относительно крюка 400, и первая система О1 координат установлена относительно верхней части подъемной стрелы 200. Таким образом, относительное положение между этими двумя системами координат может изменяться, когда крюк 400 раскачивается или перемещается вверх и вниз относительно подъемной стрелы 200, и, таким образом, изменение параметров положения крюка 400 может быть отражено изменением соотношения положений между этими двумя системами координат, что дает базис для определения параметров положения крюка 400. Первая система О1 координат не ограничена установкой относительно верхней части подъемной стрелы 200 и также может быть установлена относительно других частей крана в дополнение к крюку 400. Если кран представляет собой кран другого типа, такой как портальный кран, процессор 530 может установить систему координат на основе заданного пространственного положения в соответствии с фактическими рабочими требованиями. Пока изменение параметров перемещения и положения крюка 400 могут быть отражены изменением соотношения положений между первой системой О1 координат и второй системой О2 координат во время операции подъема, параметры положения крюка 400 могут быть определены, и, таким образом, цель настоящего изобретения может быть достигнута.
В первом варианте осуществления изобретения, показанном на фиг.3, изображен схематический вид, показывающий сравнение между первой системой координат и второй системой координат, где оси координат первой системы координат показаны сплошной линией, в то время как оси координат второй системы координат показаны пунктиром. В варианте осуществления изобретения первая система О1 координат и вторая система О2 координат обе являются трехмерными прямоугольными системами координат. Первая система О1 координат включает три оси координат, которые представлены осью Х1, осью Y1 и осью Z1; и вторая система О2 координат включает три оси координат, которые представлены осью X2, осью Y2 и осью Z2; причем ось Х1, ось Y1 и ось Z1, соответственно, соответствуют оси X2, оси Y2 и оси Z2.
Инструмент 510 для измерения угла приспособлен для измерения углов между осями координат второй системы О2 координат и соответствующими осями координат первой системы О1 координат. В варианте осуществления изобретения инструмент для измерения угла является трехосным инструментом для измерения угла, который включает три измерительных вала. Оси трех измерительных валов соответственно параллельны трем осям координат второй системы О2 координат, то есть углы между осями трех измерительных валов и тремя осями координат второй системы О2 координат все равны нулю градусов. Таким образом, когда вторая система О2 координат вращается относительно первой системы О1 координат, углы между тремя осями координат второй системы О2 координат и соответствующими осями координат первой системы О1 координат могут быть получены соответствующими измерительными валами. Как показано на фиг.3, угол "a" между осью Z1 и осью Z2, угол "b" между осью Y1 и осью Y2 и угол "c" между осью Х1 и осью X2 может быть измерен инструментом 510 для измерения угла. Понято, что инструмент для измерения угла также может включать три датчика угла, каждый из которых используется для измерения угла между каждой парой осей координат.
Измеритель 520 ускорения приспособлен для измерения ускорения крюка в заданном направлении, проходящем под заданными углами относительно осей координат второй системы О2 координат. В варианте осуществления изобретения измеритель 520 ускорения является трехосным измерителем ускорения, который включает три измерительных вала. Оси трех измерительных валов соответственно параллельны трем осям координат второй системы О2 координат, то есть, углы между осями трех измерительных валов и тремя осями координат второй системы О2 координат все равны нулю градусов. Таким образом, ускорение в направлении каждой оси координат второй системы О2 координат может быть измерено измерителем 520 ускорения. Как показано на фиг.3, ускорение "αх2" вдоль оси X2, ускорение "αy2" вдоль оси Y2 и ускорение "αz2" вдоль оси Z2 могут быть измерены измерителем 520 ускорения. Понято, что три измерительных вала трехосного измерителя ускорения могут быть под заданными углами относительно трех осей координат второй системы О2 координат соответственно, вместо того, чтобы быть параллельными трем осям координат второй системы О2 координат. Таким образом, после того, как ускорения в направлении соответствующих осей трех измерительных валов измерены, ускорения αх2, αy2, αz2 крюка 400 в направлении осей координат второй системы О2 координат могут быть получены посредством вычисления.
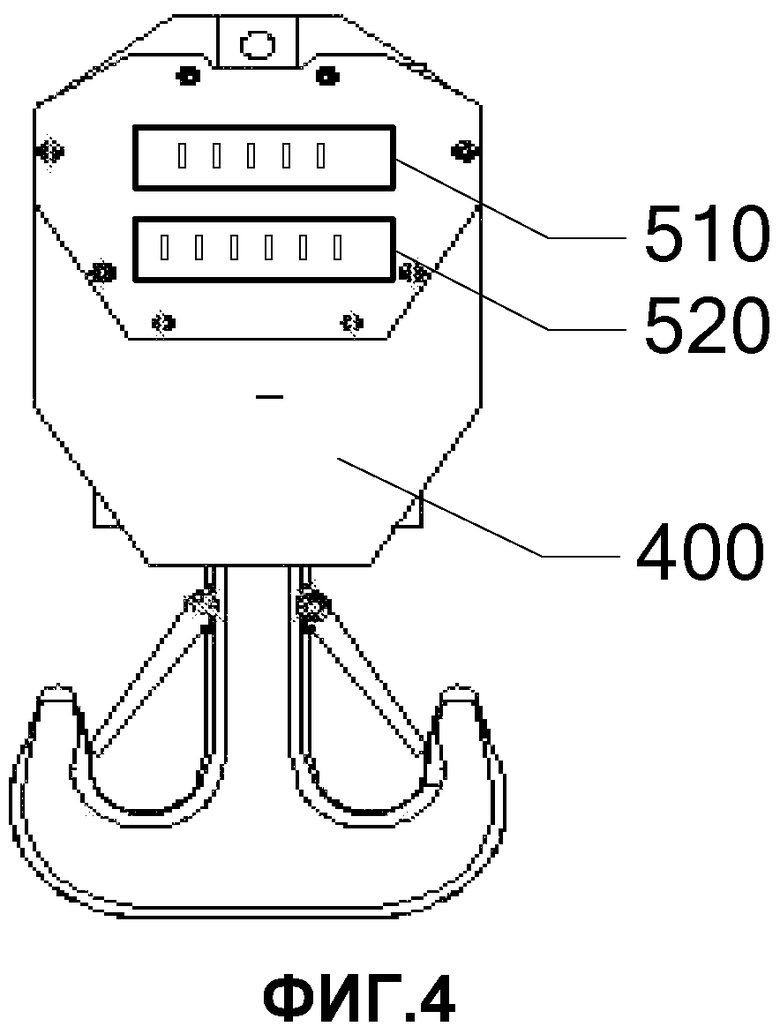
На фиг.4 изображен схематический вид, показывающий соотношение положений между инструментом для измерения угла, измерителем ускорения и крюком. В варианте осуществления изобретения инструмент 510 для измерения угла и измеритель 520 ускорения установлены относительно крюка 400 так, что данные, полученные инструментом 510 для измерения угла и измерителем 520 ускорения, могут прямо относиться к состоянию перемещения крюка 400. Кроме того, инструмент 510 для измерения угла и измеритель 520 ускорения могут быть установлены относительно подвесного проволочного каната 410 подвесного крюка 400. Параметры положения крюка 400 могут быть определены в соответствии с параметрами положения подвесного проволочного каната 410, так как перемещение подвесного проволочного каната 410 может быть синхронизировано с перемещением крюка 400, и существует определенное соотношение между параметрами положения и состоянием перемещения подвесного проволочного каната 410 и крюка 400, и, таким образом, цель настоящего изобретения может быть достигнута.
Процессор 530 также приспособлен для получения параметров положения крюка 400 в первой системе О1 координат в соответствии с углами, измеренными инструментом 510 для измерения угла, и ускорениями, измеренными измерителем 520 ускорения. Параметры положения могут включать скорость V перемещения, направление перемещения и положение крюка 400 в первой системе координат.
Устройство вывода 540 выдает параметры положения, полученные процессором 530, чтобы снабжать ими оператора или систему управления краном.
Далее будет описан конкретный способ получения указанных выше параметров положения.
Во-первых, определяется ускорение крюка 400 в направлении каждой оси координат первой системы О1 координат, где в первой системе О1 координат ускорение в направлении оси Х1 равно αх1=αх2×cosc, ускорение в направлении оси Y1 равно αy1=αy2×cosb и ускорение в направлении оси Z1 равно αz1=αz2×cosa. Таким образом может быть получено ускорение крюка 400 в направлении каждой оси координат первой системы О1 координат.
Во-вторых, процессор 530 выполняет обработку за заданный период и получает мгновенную скорость крюка в направлении каждой оси координат первой системы О1 координат в соответствии с полученными αх1, αy1, αz1 при помощи следующих уравнений:
где Vx обозначает мгновенную скорость крюка 400 в направлении оси Х1, Vy обозначает мгновенную скорость крюка 400 в направлении оси Y1, Vz обозначает мгновенную скорость крюка в направлении оси Z1, и мгновенная скорость представляет собой скорость крюка 400 в режиме реального времени, полученную процессором 530; V0x, V0y и V0z - это соответственно начальные скорости в направлениях оси Х1, оси Y1 и оси Z1, то есть скорости, полученные процессором 530 в предыдущий период обработки, и "dt" обозначает период обработки процессором 530. Таким образом, в первой системе О1 координат мгновенная скорость в направлении каждой оси координат первой системы О1 координат может быть получена в соответствии с дискретной функцией ускорения, связанной со временем. Устройство определения положения крюка может начать работу, когда выполняется операция подъема краном, и заданные величины V0x, V0y и V0z соответствуют состоянию в начале подъема и позволяют процессору 530 получить мгновенную скорость в направлении каждой оси координат первой системы О1 координат в соответствии с углами, полученными инструментом 510 для измерения угла, и ускорениями, полученными измерителем 520 ускорения. Мгновенная скорость может отражать состояние перемещения крюка 400 в режиме реального времени, и параметры положения крюка 400 в режиме реального времени также могут быть определены в соответствии с мгновенной скоростью.
На фиг.5 показан схематический вид, показывающий результирующий вектор перемещения крюка. Мгновенная скорость V крюка 400 в первой системе О1 координат может быть получена в соответствии с соотношением между Vx, Vy и Vz, и этой мгновенной скоростью является результирующая скорость крюка 400, где
Тогда положение перемещения крюка 400 может быть получено и определено в соответствии с расстоянием между крюком 400 и заданным положением. Так как траектория перемещения крюка 400 нелинейная, для точного получения расстояния между крюком и заданным положением сначала может быть получено мгновенное смещение крюка 400 в направлении каждой оси координат первой системы О1 координат относительно заданного положения, где:
мгновенное смещение в направлении оси Х1 равно
мгновенное смещение в направлении оси Y1 равно
мгновенное смещение в направлении оси Z1 равно
В указанных выше формулах S0x, S0y и S0z - это соответственно начальные расстояния в направлении оси Х1, оси Y1 и оси Z1 между крюком 400 и заданным положением, то есть мгновенные смещения, полученные процессором 530 в предыдущий период обработки; "dt" обозначает период обработки процессором 530. Таким образом, в первой системе О1 координат мгновенное смещение крюка 400 в направлении каждой оси координат первой системы О1 координат может быть получено в соответствии с дискретной функцией ускорения, связанной со временем, и получено мгновенное расстояние в направлении каждой оси координат между крюком 400 и заданным положением. Принимая неподвижное положение крюка за исходную точку, может быть определена величина смещения крюка 400 в направлении каждой оси координат для определения расстояния и амплитуды раскачивания. Кроме того, мгновенное смещение S крюка 400, которое является результирующим смещением крюка 400 в первой системе О1 координат, может быть получено в соответствии с Sx, Sy, Sz для определения мгновенного расстояния между крюком 400 и заданным положением, которое равно:
Подобным образом, принимая неподвижное положение крюка за исходную точку, могут быть определены положение и амплитуда раскачивания крюка 400.
В соответствии с указанными выше параметрами положения, полученными процессором 530, оператор может точно знать информацию о крюке 400, такую как положение, мгновенная скорость и амплитуда раскачивания, для определения состояния перемещения крюка 400, чтобы он мог принять более соответствующие стабилизирующие крюк меры для уменьшения времени, требуемого для операции подъема, и улучшить эффективность операции подъема.
При фактической операции подъема указанная выше цель изобретения может быть достигнута двумя двумерными системами координат. Первая система О1 координат и вторая система О2 координат не ограничены прямоугольными системами координат и также могут быть системами полярных координат или другими системами координат. В случае, когда первая система О1 координат и вторая система О2 координат обе включают одну ось координат или две оси координат, инструмент 510 для измерения угла может включать один измерительный вал или два измерительных вала, и ось каждого измерительного вала параллельна или находится под заданным углом относительно оси координат второй системы О2 координат. Подобно этому, угол между соответствующими осями координат этих двух систем координат может быть получен указанным выше образом, чтобы также получать ускорения крюка 400 в направлении соответствующей оси координат первой системы О1 координат в соответствии с углом и ускорением, измеренным измерителем 520 ускорения, и также получить параметры положения крюка 400.
Подобно этому, в случае, когда первая система О1 координат и вторая система О2 координат являются системами координат разных типов, измеритель 520 ускорения также может включать один измерительный вал или два измерительных вала, и ось каждого измерительного вала параллельна или находится под заданным углом относительно оси координат второй системы О2 координат, и ускорение крюка 400 в направлении соответствующей оси координат второй системы О2 координат может быть получено аналогично указанным выше образом для достижения цели настоящего изобретения. Для измерения ускорения крюка 400 более точно предпочтительное техническое решение состоит в том, что измеритель ускорения имеет функцию измерения ускорения в трехмерных направлениях, чтобы более точно получить компоненты ускорения в направлении заданной оси координат.
Чтобы позволить оператору более прямо определять положение крюка 400, устройство 540 вывода может быть световым индикатором, который выдает заданное указание, когда заданные параметры положения крюка 400 достигают заданной величины; или он может быть индикаторным устройством, которое отображает пригодным образом параметры положения крюка, например положение и траектория перемещения крюка 400 могут быть отображены индикаторным устройством в форме схематического изображения так, чтобы оператор мог знать положение крюка 400 в соответствии со схематическим изображением, отображенным индикаторным устройством, и определить амплитуду раскачивания крюка 400. Кроме того, процессор 530 может предварительно установить пороговые значения параметров в соответствии с фактическими требованиями операции подъема и фактическим состоянием крюка 400 и сравнивать полученные заданные параметры положения крюка 400 с заданными пороговыми значениями параметров для определения, воздействует ли состояние перемещения крюка 400 на нормальную операцию подъема или нет, и затем выполнять заданную обработку в соответствии с результатом сравнения. Например, можно предварительно установить пороговое значение скорости крюка 400, таким образом, чтобы соответствующая обработка выполнялась, когда скорость крюка 400 чрезмерно высока. Также можно установить пороговое значение амплитуды раскачивания, таким образом, чтобы соответствующая заданная обработка выполнялась, когда положение крюка 400 выходит за пределы порогового значения амплитуды раскачивания. Заданная обработка может быть предназначена для выдачи соответствующего сигнала предупреждения, генерирования пригодного сигнал и т.п., или может быть предназначена для остановки работы крана системой управления краном в случае возникновения значительных угроз безопасности.
Так как устройство определения положения крюка в соответствии с настоящим изобретением дает указанные выше технические эффекты, кран, включающий указанное выше устройство определения положения крюка, также дает соответствующие технические эффекты. Для облегчения информационной связи и облегчения знания оператором состояния крюка 400 процессор 530 и инструмент 510 для измерения угла могут быть установлены на крюке 400 или подвесном проволочном канате 410, и устройство 540 вывода может быть установлено в кабине управления и может иметь беспроводную связь с процессором 530.
Приведенное выше описание представляет только предпочтительные варианты осуществления настоящего изобретения. Следует отметить, что некоторые усовершенствования и изменения могут быть сделаны специалистами в данной области техники, не отступая от принципов настоящего изобретения, например, инструмент 510 для измерения угла может быть датчиком угла, магнитометром, гироскопом и т.д., и процессор 530 также может включать устройство фильтрования, аналого-цифровой преобразователь и т.д. Эти усовершенствования и изменения следует считать входящими в объем охраны настоящего изобретения.
Изобретение касается устройства определения положения крюка. Устройство определения положения крюка содержит инструмент для измерения угла между осью во второй системе координат и соответствующей осью в первой системе координат, измеритель ускорения для измерения ускорения крюка в заданном направлении, процессор для создания первой системы координат и второй системы координат и устройство вывода. Первая система координат связана с заданным местоположением, а вторая система координат связана с крюком. Процессор получает параметры положения крюка в первой системе координат в соответствии с углом, измеренным инструментом для измерения угла, и ускорением, измеренным измерителем ускорения. Оператор способен принять надлежащие стабилизирующие крюк меры в соответствии с параметрами положения. Изобретение касается также крана с устройством определения положения крюка. В результате повышается эффективность работы крана. 2 н. и 8 з.п. ф-лы, 5 ил.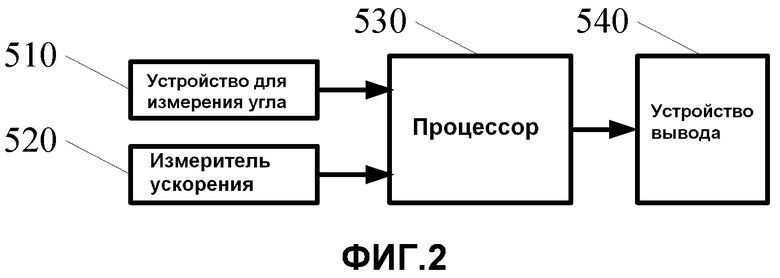
1. Устройство определения положения крюка, содержащее:
инструмент (510) для измерения угла, выполненный с возможностью измерения угла между осью координат второй системы (O2) координат и соответствующей осью координат первой системы (O1) координат в режиме реального времени;
измеритель (520) ускорения, выполненный с возможностью измерения ускорения крюка (400) в заданном направлении в режиме реального времени, при этом существует заданный угол между заданным направлением и осью координат второй системы (O2) координат;
процессор (530), выполненный с возможностью создания первой системы (O1) координат и второй системы (O2) координат, причем первая система (O1) координат установлена относительно заданного положения, и вторая система (O2) координат установлена относительно крюка (400), при этом ось координат первой системы (O1) координат соответствует оси координат второй системы (O2) координат; и параметры положения крюка (400) в первой системе (O1) координат получают на основе угла, измеренного инструментом (510) для измерения угла, и ускорения, измеренного измерителем (520) ускорения; и
устройство (540) вывода, выполненное с возможностью выдачи параметров положения.
2. Устройство определения положения крюка по п.1, в котором первая система (O1) координат является прямоугольной системой координат, содержащей ось X1, ось Y1 и ось Z1, и вторая система (О2) координат является прямоугольной системой координат, содержащей ось Х2, ось Y2 и ось Z2, при этом ось X1, ось Y1 и ось Z1, соответственно, соответствуют оси Х2, оси Y2 и оси Z2.
3. Устройство определения положения крюка по п.2, в котором инструмент (510) для измерения угла является трехосным устройством для измерения угла, причем существуют заданные углы между осями трех измерительных валов трехосного инструмента для измерения угла и тремя осями координат второй системы (O2) координат, соответственно.
4. Устройство определения положения крюка по п.3, в котором заданные углы между осями трех измерительных валов инструмента (510) для измерения угла и тремя осями координат второй системы (O2) координат все равны нулю градусов.
5. Устройство определения положения крюка по любому из пп.2-4, в котором измеритель (520) ускорения является трехосным измерителем ускорения, и существуют заданные углы между осями трех измерительных валов трехосного измерителя ускорения и тремя осями координат второй системы (O2) координат, соответственно.
6. Устройство определения положения крюка по п.5, в котором заданные углы между осями трех измерительных валов измерителя (520) ускорения и тремя осями координат второй системы (O2) координат все равны нулю градусов.
7. Устройство определения положения крюка по п.1, в котором устройство (540) вывода содержит индикаторное устройство, отображающее параметры положения в форме схематического изображения.
8. Устройство определения положения крюка по п.1, в котором параметры положения содержат, по меньшей мере, одно из мгновенной скорости, направления перемещения и положения крюка (400) в первой системе (O1) координат.
9. Устройство определения положения крюка по п.1, в котором процессор (530) выполнен с возможностью сравнения параметров положения с заданными пороговыми значениями параметров для определения безопасности операции подъема и осуществления заданной обработки в соответствии с результатом сравнения.
10. Кран, содержащий подъемную стрелу (200), подвесной проволочный канат (410), крюк (400) и устройство определения положения крюка по любому из пп.1-9, в котором подвесной проволочный канат (410) имеет нижний конец, соединенный с крюком (400), и верхний конец, соединенный с неподвижным блоком на подъемной стреле (200), при этом инструмент (510) для измерения угла и измеритель (520) ускорения устройства определения положения крюка оба прикреплены к подвесному проволочному канату (410) или к крюку (400).
| Волчок для разработки лоскута | 1937 |
|
SU58110A2 |
| УКВ РАДИОУСТРОЙСТВО | 1940 |
|
SU62916A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОДЪЕМА КРЮКА СТРЕЛОВОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2096307C1 |
| JP 08143273 A, 04.06.1996 | |||
| US 5526946 A, 18.06.1996 | |||
| Способ борьбы с бесплодием животных | 1988 |
|
SU1757554A1 |

