Изобретение относится к области радиолокации и может быть использовано в системах поиска и сопровождения объектов.
Известен радиолокатор, изложенный в кН.: «Радиотехнические системы», Ю.М. Казаринов, 1990 г., М., Высшая школа, стр.194. В нем происходят излучение импульсной электромагнитной энергии и прием отраженных от объектов сигналов. Однако для формирования коротких импульсов и обеспечения поиска и слежения за объектами без уменьшения точностных характеристик в увеличенном поле зрения необходимы сложные и громоздкие узлы.
Известен радиолокатор, изложенный в вышеупомянутом источнике на стр.345-353, рис.16.1. Он может осуществлять поиск и слежение за наземными, надводными и воздушными объектами. В нем с помощью частотного модулятора осуществляется изменение частоты, выдаваемой генератором высокой частоты в передающую антенну, имеющую увеличенное поле зрения, и которая может быть неподвижной. Последняя излучает непрерывную электромагнитную энергию, которая отражается от объекта и поступает в жестко связанную с передающей приемную антенну, имеющую выход, соединенный с приемником, где электромагнитная энергия преобразуется в электрические сигналы и где происходят их усиление и детектирование. В приемник также поступает изменяющаяся частота с генератора высокой частоты. Так как частота за время прихода отраженного сигнала изменится пропорционально расстоянию до объекта, то частота на выходе приемника равна разности частот с генератора и отраженной частоты. В результате на выходе приемника после детектирования возникают биения, которые далее усиливаются в усилителе напряжений биений, имеющий выход, соединенный с входом амплитудного селектора, выделяющего амплитуду, характерную для объекта.
Далее осуществляется последовательный анализ спектра биений. Каждому спектру соответствует определенная частота, характеризующая дальность до объекта, которая определяется в блоке определения частоты биений. В блоке вторичной обработки на основании информации о дальности угловых координат осуществляется построение направления движения объектов. Однако при увеличенном поле зрения для обеспечения слежения за объектами необходимы сложные и громоздкие узлы.
С помощью предлагаемого устройства обеспечивается слежение за объектами без использования сложных и громоздких узлов. Достигается это введением последовательного анализатора спектра биений в заданном интервале блока автосопровождения по дальности, повернутой дополнительной приемной антенны, второго приемника, второго усилителя напряжений биений, второго амплитудного селектора и блока определения направления, при этом передающая антенна жестко связана с повернутой дополнительной приемной антенной, имеющей выход, соединенный с первым входом второго приемника, второй вход которого соединен с выходом генератора высокой частоты, а выход через второй усилитель напряжения биений через второй амплитудный селектор соединен с первым входом блока определения направления, имеющего группу выходов, соединенную с первой группой входов блока вторичной обработки, вторую группу входов, соединенную через блок автосопровождения по дальности с группой выходов блока определения частоты биений, вход которого соединен через последовательный анализатор спектра биений в заданном интервале с вторым входом блока определения направления и с выходом первого амплитудного селектора.
На фиг.1 и в тексте приняты следующие обозначения:
1 - частотный модулятор
2 - генератор высокой частоты
3 - передающая антенна
4 - амплитудный селектор
5 - усилитель напряжения биения
6 - приемник
7 - приемная антенна
8 - повернутая дополнительная приемная антенна
9 - последовательный анализатор спектра биений в заданном интервале
10 - усилитель напряжения биений
11 - приемник
12 - блок определения частоты биений
13 - амплитудный селектор
14 - блок автосопровождения по дальности
15 - блок определения направления
16 - блок вторичной обработки,
при этом выход частотного модулятора 1 через генератор высокой частоты 2 соединен с входом передающей антенны 3, жестко связанной с приемной антенной 7, выход которой соединен с первым входом приемника 6, имеющего второй вход и выход, соответственно соединенные с выходом генератора высокой частоты 2 и через усилитель напряжения биений 5 с входом амплитудного селектора 4, к тому же передающая антенна 3 также жестко связана с повернутой дополнительной приемной антенной 8, имеющей выход, соединенный с первым входом приемника 11, второй вход которого соединен с выходом генератора высокой частоты 2, а выход через усилитель напряжения биений 10, через амплитудный селектор 13 соединен с первым входом блока определения направления 15, имеющего группу выходов, соединенную с первой группой входов блока вторичной обработки 16, имеющего вторую группу входов, соединенную через блок автосопровождения по дальности 14 с группой выходов блока определения частоты биений 12, вход которого соединен через последовательный анализатор спектра биений в заданном интервале 9 с вторым входом блока определения направления 15 и с выходом амплитудного селектора 4.
Устройство работает следующим образом.
С помощью частотного модулятора 1 осуществляется изменение выдаваемой генератором высокой частоты 2, поступающей далее в неподвижную передающую антенну 3, имеющую поле зрения, например 40 градусов по горизонтали и 5 градусов по вертикали. Антенна излучает непрерывную электромагнитную энергию, которая отражается от объектов и поступает в жестко связанные с передающей приемную антенну 7 и повернутую дополнительную приемную антенну 8. Последняя повернута относительно антенны 7 таким образом, что ширина пересечения их диаграмм по горизонтали может составлять например 40 градусов и одинаково направлена с диаграммой передающей антенны 3, а ширина равных диаграмм приемных антенн 7, 8 может составлять, например, 60 градусов. Для улучшения точностных характеристик по направлению величины полей зрения по вертикали могут быть увеличены по сравнению с передающей антенной 3 и составляет, например, 30 градусов, С выходов антенн 7, 8 электромагнитные сигналы поступают соответственно в приемники 6, 11, где преобразуются в электрические, усиливаются и детектируются.
В приемники также поступает изменяющаяся частота с генератора высокой частоты 2. Так как частота за время прихода отраженного сигнала изменяется пропорционально расстоянию до объекта, то частота на выходе приемников 6, 11 равна разности частот с генератора высокой частоты 2 и частот с соответствующих антенн 7, 8. В результате на выходах приемников возникают биения, которые далее усиливаются в соответствующих усилителях напряжений биения 5, 10 и далее проходят через соответствующие амплитудные селекторы 4, 13, где выделяются амплитуды, соответствующие ожидаемым объектам. Так как антенны повернуты относительно друг друга, то амплитуды с выходов приемников будут иметь разные значения. По соотношениям амплитуд с выходов этих селекторов определятся в блоке определения направления 15 азимутальные направления на объекты, которые в виде кода поступают с группы выходов блока 15 на первую группу входов блока вторичной обработки 16.
Пример конкретного исполнения блока определения направления представлен в вышеупомянутом источнике на стр.412. Выделенные биения амплитуд с выхода амплитудного селектора 4 поступают в последовательный анализатор спектра биений в заданном интервале 9, где выделяются спектры, соответствующие интервалу дальностей зоны, где ожидается появление объектов. При этом осуществляется последовательный анализ спектров биений. Каждому спектру соответствует определенная частота, характеризующая дальность до объекта.
Пример конкретного исполнения последовательного анализатора спектра биений в заданном интервале 9 представлен в вышеупомянутом источнике на стр.351. С выхода анализатора 9 спектры последовательно поступают в блок определения частоты биений 12, где происходит преобразование спектров в параллельные коды, следующие друг за другом. Количество кодов равно количеству обнаруженных объектов. Формирование кодов может осуществляться путем подсчета количества биений за определенное время, например так, как отмечено в вышеупомянутом источнике на стр.352, где показаны следующие друг за другом биения в виде импульсов. Параллельные коды, характеризующие дальность, поступают в блок автосопровождения по дальности 14. Последний, анализируя изменения дальностей, осуществляет автосопровождение объектов по дальностям, устраняя мешающие частоты. Таким образом, осуществляется стробирование по частотам каждого движущегося объекта. С группы выходов блока автосопровождения по дальности 14 параллельные коды поступают в блок вторичной обработки 16 на вторую его группу входов, а на первую группу входов поступают угловые координаты с группы выходов блока определения направления 15. На основании этих данных в блоке вторичной обработки 16 осуществляется построение траекторий движения объектов и обеспечивается постоянное слежение в широком поле зрения без применения сложных узлов с оптимальными точностными характеристиками.
Пример конкретного исполнения блока вторичной обработки представлен, например, в кн.: «Радиотехнические системы». Пестряков В. и др., 1986 г., стр.219. Блок автосопровождения по дальности также выполняет функции блока вторичной обработки.
Предлагаемое устройство можно использовать для осуществления поиска и слежения за движущимися наземными, надводными и низколетящими объектами. Таким образом, без усложнения узлов, используя широко направленные неподвижные антенны, обеспечивается постоянная отработка информации от объектов, это дает возможность осуществить многоцелевое слежение с сохранением точностных характеристик, что обеспечивает экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ВОДНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2506539C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ВОДНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2557331C1 |
| УСТРОЙСТВО ПОИСКА ОБЛАКОВ И МОЛНИЕВЫХ РАЗРЯДОВ | 2014 |
|
RU2568653C1 |
| ТРЕХКООРДИНАТНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2510889C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| АККУСТИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2013 |
|
RU2525472C1 |
| ВЫСОТОМЕР | 2012 |
|
RU2501036C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| СИСТЕМА РАДИОСВЯЗИ | 2013 |
|
RU2545513C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО ИМПУЛЬСНОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505837C1 |
Радиолокатор обеспечивает слежение за объектами без использования сложных и громоздких узлов при увеличении поля зрения благодаря введению последовательного анализатора спектра биений в заданном интервале, блока автосопровождения по дальности, повернутой дополнительной приемной антенны, второго приемника, второго усилителя напряжений биений, второго амплитудного селектора и блока определения направления, при этом передающая антенна жестко связана с повернутой дополнительной приемной антенной, имеющей выход, соединенный с первым входом второго приемника, второй вход которого соединен с выходом генератора высокой частоты, а выход через второй усилитель напряжения биении, через второй амплитудный селектор соединен с первым входом блока определения направления, имеющего группу выходов, соединенную с первой группой входов блока вторичной обработки, вторую группу входов, соединенную через блок автосопровождения по дальности с группой выходов блока определения частоты биений, вход которого соединен через последовательный анализатор спектра биений в заданном интервале с вторым входом блока определения направления и с выходом первого амплитудного селектора. 1 ил.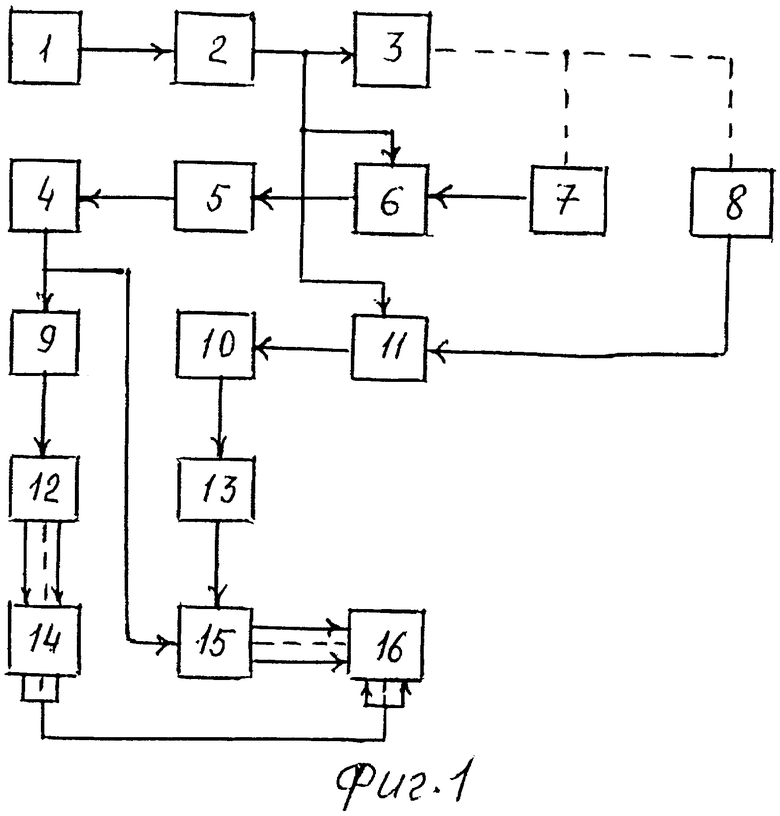
Радиолокатор, состоящий из частотного модулятора, генератора высокой частоты, передающей антенны, приемной антенны, приемника, усилителя напряжения биений, амплитудного селектора, блока определения частоты биений и блока вторичной обработки, где выход частотного модулятора через генератор высокой частоты соединен с входом передающей антенны, жестко связанной приемной антенной, выход которой соединен с первым входом приемника, имеющего второй вход и выход, соответственно соединенные с выходом генератора высокой частоты и через усилитель напряжения биений с выходом амплитудного селектора, отличающийся тем, что вводятся последовательный анализатор спектра биений в заданном интервале, блок автосопровождения по дальности, повернутая дополнительная приемная антенна, второй приемник, второй амплитудный селектор и блок определения направления, при этом передающая антенна жестко связана с повернутой дополнительной приемной антенной, имеющей выход, соединенный с первым входом второго приемника, второй вход которого соединен с выходом генератора высокой частоты, а выход через второй усилитель напряжения биений через второй амплитудный селектор соединен с первым входом блока определения направления, имеющего группу выходов, соединенную с первой группой входов блока вторичной обработки, вторую группу входов, соединенную через блок автосопровождения по дальности с группой выходов блока определения частоты биений, вход которого соединен через последовательный анализатор спектра биений в заданном интервале со вторым входом блока определения направления и с выходом первого амплитудного селектора.
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| РАДИОЛОКАТОР БЛИЖНЕГО ДЕЙСТВИЯ С УЛЬТРАВЫСОКИМ РАЗРЕШЕНИЕМ (ВАРИАНТЫ) | 2007 |
|
RU2362180C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 2008 |
|
RU2399067C1 |
| RU94037470 A1, 10.09.1996 | |||
| Способ обдирки, шлифовки и полировки сферических линз | 1948 |
|
SU79186A1 |
| ГЕРБИЦИДНАЯ КОМПОЗИЦИЯ И СПОСОБ БОРЬБЫ С СОРНЫМИ РАСТЕНИЯМИ В ПОСЕВАХ КУЛЬТУРНЫХ РАСТЕНИЙ | 2011 |
|
RU2488999C2 |

