Изобретение относится к водному транспорту и может быть использовано при управлении траекторией движения судна, выполняющего сложное маневрирование, характерной особенностью которого является движение судна с большими углами дрейфа. К таким видам маневров относятся: швартовка судна к причалу или к борту другого судна, динамическое позиционирование и др.
Повысить безопасность судна при выполнении им сложного маневрирования можно, используя возможность прогнозирования его движения. Прогнозирование движения судна как результата планируемого управляющего воздействия в реальных условиях плавания может быть осуществлено с использованием компьютерного моделирования. При этом объектом моделирования является судно, обладающее определенными гидродинамическими характеристиками, во многом определяющими характер движения судна при маневрировании. При выполнении компьютерного моделирования движения судна с большими углами дрейфа в качестве особо значимых его гидродинамических характеристик являются демпфирующие составляющие нормальной гидродинамической силы и гидродинамического момента, образующиеся на корпусе судна при его произвольном движении.
Известен способ определения демпфирующих составляющих нормальной гидродинамической силы и гидродинамического момента [1], основанный на определении текущего значения абсциссы центра вращения x0, т.е. точки, расположенной в диаметральной плоскости (ДП) судна и занимающей определенное положение на ней с учетом характерных особенностей выполняемого судном маневра. В центре вращения угол дрейфа, имеющий различные значения в различных точках, расположенных по длине судна, равен нулю, т.е. поперечная составляющая линейной скорости в центре вращения равна нулю υyО=0.
Общий вид зависимостей, предложенных Р.Я.Першицем в работе [1] для определения текущих значений демпфирующих составляющих нормальной гидродинамической силы и момента, выглядит следующим образом:


где ω - угловая скорость судна,
fy(x0), fm(x0) - функции от абсциссы центра вращения.
Однако при определении демпфирующих составляющих нормальной гидродинамической силы и момента указанным способом не рассматривают возможность экспериментального определения текущего значения абсциссы x0 центра вращения, что является актуальным при прогнозировании движения судна, совершающего сложное маневрирование. Для получения адекватного прогноза нужно непрерывно определять абсциссу x0 центра вращения в процессе выполнения маневра.
Целью заявляемого изобретения является повышение безопасности управления судном при выполнении им сложного маневрирования за счет прогнозирования его движения по заданной траектории с использованием компьютерного моделирования на базе известных текущих значений гидродинамических характеристик судна, в частности демпфирующих составляющих нормальной гидродинамической силы и момента, образующихся на корпусе судна при его движении.
Для этого измеряют поперечные линейные ускорения в носовой F и кормовой A точках судна. По результатам измерений определяют поперечные составляющие линейных скоростей носовой и кормовой точек судна и с использованием их значений рассчитывают текущее значение абсциссы x0 центра вращения. В соответствии с текущим значением абсциссы x0 центра вращения, а также значения текущей угловой скорости судна ω определяют текущие значения демпфирующих составляющих нормальной гидродинамической силы и момента, далее используют эти значения для компьютерного моделирования с целью прогнозирования движения судна при выполнении им сложного маневрирования.
Сущность способа поясняется чертежом и заключается в следующем.
В условиях выполнения судном сложного маневрирования и необходимости прогнозирования траектории его движения с целью повышения безопасности управления движением судна в носовой F и кормовой A точках судна, разнесенных по его длине на определенное расстояние в диаметральной плоскости (ДП) судна, размещают датчики линейных ускорений.
В процессе движения судна датчики ускорений измеряют текущие значения поперечных линейных ускорений wyF и wyA в носовой F и кормовой A точках судна.
Используя очевидные соотношения:
рассчитывают текущие значения поперечных составляющих линейных скоростей носовой F и кормовой A точек судна.
На основании зависимости, следующей из чертежа
рассчитывают текущее значение абсциссы центра вращения x0.
На основании показаний гирокомпаса ψ(t) (текущее значение курса судна) определяют угловую скорость судна 

Пользуясь зависимостями (1) и (2), определяют текущие значения демпфирующих составляющих нормальной гидродинамической силы и гидродинамического момента, которые в дальнейшем используют при компьютерном моделировании для прогнозирования движения судна в условиях сложного маневрирования.
Литература
1. Справочник по теории корабля. / Под ред. Я.И.Войткунского. - Л.: Судостроение, 1973. - 512 с.
Изобретение относится к водному транспорту и может быть использовано при управлении траекторией движения судна, выполняющего сложное маневрирование. Способ определения демпфирующих составляющих нормальной гидродинамической силы и момента включает определение текущего значения абсциссы центра вращения, угловой скорости судна, демпфирующих составляющих нормальной гидродинамической силы и ее момента. В способе дополнительно используют расположенные в диаметральной плоскости судна условно называемые кормовую точку A и носовую точку F, в которых размещают датчики линейных ускорений. С помощью датчиков измеряют значения поперечных линейных ускорений wyF, wyA соответственно в носовой точке F и кормовой точке А. Затем рассчитывают текущие значения поперечных составляющих линейных скоростей υyA, υyF точек А и F. Затем определяют нормальную гидродинамическую силу и ее момент. Текущее значение абсциссы х0 центра вращения определяют непрерывно в процессе выполнения маневра. Достигается повышение безопасности управления судном при выполнении им сложного маневрирования. 4 з.п. ф-лы, 1 ил.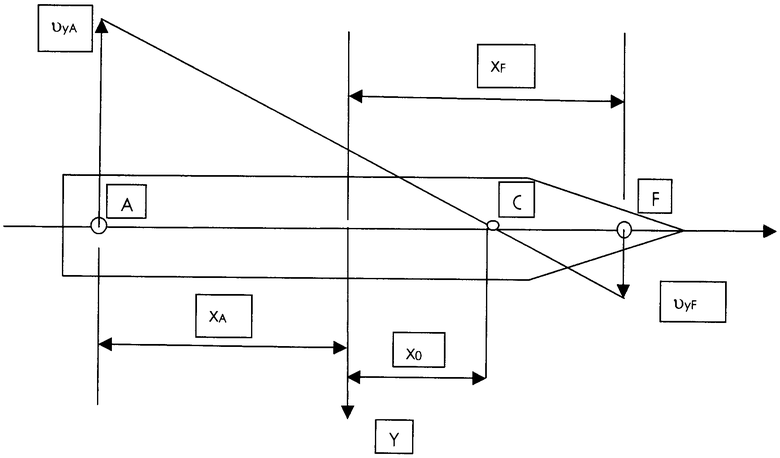
1. Способ определения демпфирующих составляющих нормальной гидродинамической силы и момента, включающий определение текущего значения абсциссы центра вращения, угловой скорости судна, демпфирующих составляющих нормальной гидродинамической силы и ее момента, отличающийся тем, что дополнительно используют расположенные в диаметральной плоскости судна условно называемые кормовую точку A и носовую точку F, в которых размещают датчики линейных ускорений, с их помощью измеряют значения поперечных линейных ускорений wyF, wyA соответственно в носовой точке F и кормовой точке А, рассчитывают текущие значения поперечных составляющих линейных скоростей υyA, υyF точек А и F, текущее значение абсциссы х0 центра вращения определяют непрерывно в процессе выполнения маневра.
2. Способ по п.1, отличающийся тем, что абсциссу центра вращения определяют по формуле:
где
υyF - поперечная составляющая линейной скорости точки F,
υyA - поперечная составляющая линейной скорости точки А,
xA - абсцисса точки А,
xF - абсцисса точки F.
3. Способ по п.1, отличающийся тем, что текущие значения поперечных составляющих линейных скоростей носовой F и кормовой А точек судна определяют на основании очевидных соотношений:
4. Способ по п.1, отличающийся тем, что угловую скорость ω судна во время маневрирования определяют на основании показаний гирокомпаса 
5. Способ по п.1, отличающийся тем, что демпфирующие составляющие нормальной гидродинамической силы и ее момента определяют
YД=ω2fy(x0);
MД=ω2fm(x0),
где
ω - угловая скорость судна,
fy(x0), fm(x0) - функции от абсциссы центра вращения.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГИДРОДИНАМИЧЕСКИХ ПАРАМЕТРОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 2010 |
|
RU2442718C1 |
| CN 101707016 A, 12.05.2010 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |

