Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к подаче энергии питания в вычислительных системах и, в частности, к системе, методологии и архитектуре эффективного электропитания платформы.
Уровень техники
Существующие схемы управления электропитанием на основе операционной системы (ОС), такие как ACPI (усовершенствованный интерфейс конфигурации и управление питанием), являются ОС-центрическими. Переходы состояний платформы и устройства, будучи инициированными из программной интегрированной среды управления электропитанием на основе ОС, обычно должны осуществляться вплоть до стека ядра ОС, драйверов устройств, встроенного программного обеспечения платформы и в конечном итоге до модуля управления энергопитанием платформы (обычно контроллер), для изменения состояния питания. Обратное действие, будучи инициированным устройством, также является медленным, и типично также должно быть проведено по тому же пути в обратном направлении, и затем должно ожидать авторизации (и т.п.) со стороны ОС. Такая архитектура накладывает значительную неэффективность и существенные потери в отношении используемой электроэнергии. Это может быть терпимым в некоторых технологиях, в которых используются обычные решения для регулирования напряжения, которые могут иметь относительно медленные временные характеристики отклика при изменении состояния электропитания и которые трудно интегрировать с другими устройствами, например устройствами GPS, Bluetooth и USB. Соответственно, требуются новые подходы для управления электропитанием в платформах с вычислительными возможностями.
Краткое описание чертежей
Варианты осуществления изобретения иллюстрируются в качестве примера, а не для ограничения, на фигурах, представленных на приложенных чертежах, на которых одинаковые номера ссылочных позиций относятся к аналогичным элементам.
На фиг.1А показана схема обобщенной архитектуры, включающей способность управления электропитанием с прямым PMI (DPMI) в соответствии с некоторыми вариантами осуществления.
На фиг.1В показана блок-схема общей платформы, пригодной для реализации архитектуры управления электропитанием на основе DPMI, показанной на фиг.1А, в соответствии с некоторыми вариантами осуществления.
На фиг.2 показана схема, представляющая интегрированную среду управления электропитанием по фиг.1А, но более подробно, в соответствии с некоторыми вариантами осуществления.
На фиг.3 показана блок-схема платформы SoC с архитектурой DPMI в соответствии с некоторыми вариантами осуществления.
На фиг.4 показана архитектура PM-DPMI ОС в соответствии с дополнительными вариантами осуществления
На фиг.5 показана схема, представляющая интегрированные регуляторы напряжения в соответствии с некоторыми вариантами осуществления.
На фиг.6 показана схема многоэлементного IVR для обеспечения источников питания с регулируемым напряжением для ассоциированных устройств в соответствии с некоторыми вариантами осуществления.
На фиг.7 показан вид в поперечном сечении корпуса платформы в соответствии с некоторыми вариантами осуществления.
На фиг.8 показана процедура для определения допустимого диапазона активных элементов в соответствии с некоторыми вариантами осуществления.
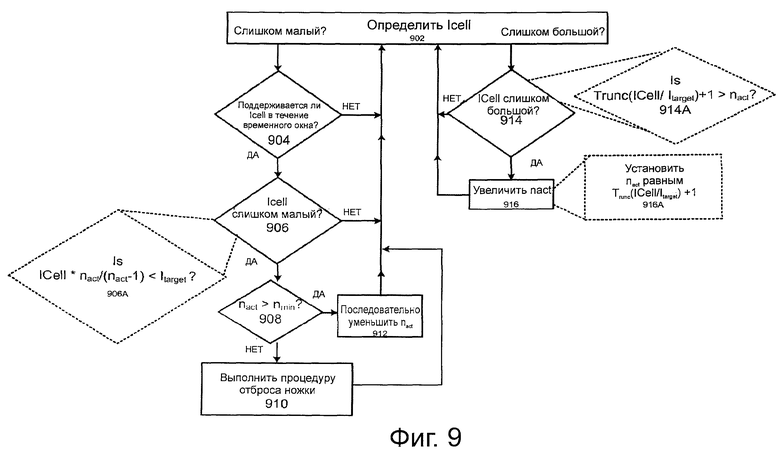
На фиг.9 показана процедура для определения количества элементов, которые должны быть активными, на основе допустимого диапазона активных элементов, в соответствии с некоторыми вариантами осуществления.
На фиг.10 показана процедура для определения, какое количество ножек переключателя должны быть активными в активном элементе в соответствии с некоторыми вариантами осуществления.
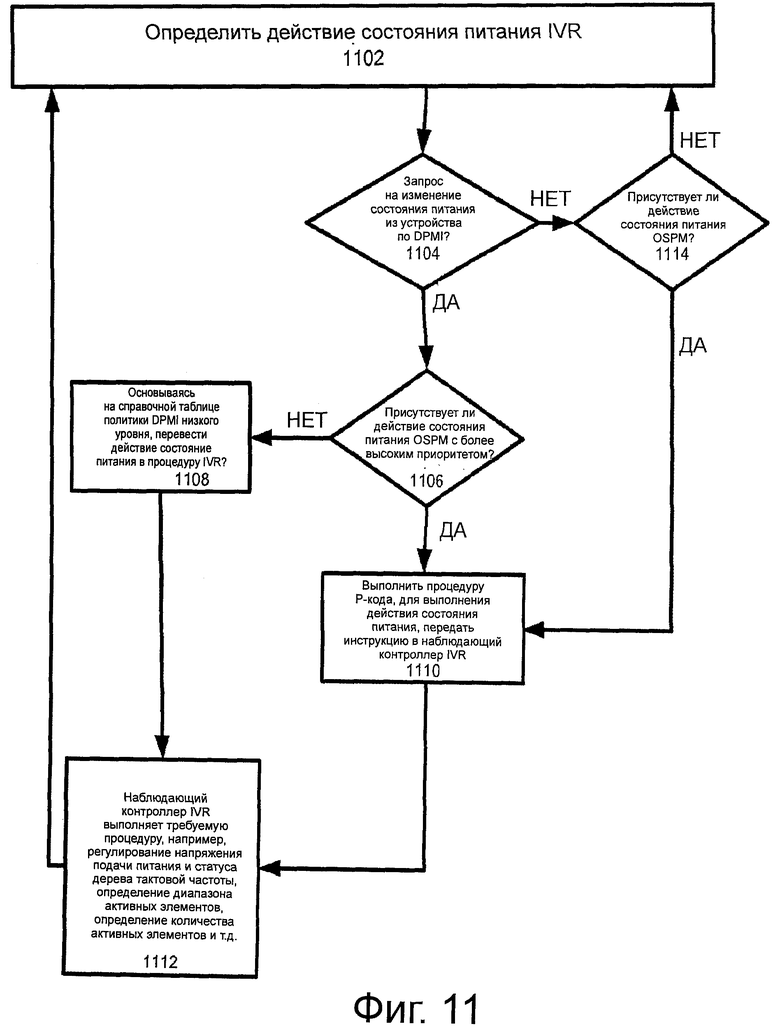
На фиг.11 показана процедура, представляющая, как PMU может определить соответствующее действие состояния питания IVR в соответствии с некоторыми вариантами осуществления.
Подробное описание изобретения
В некоторых вариантах осуществления изобретение обеспечивает более высокоэффективную архитектуру управления в режиме реального времени энергопитанием платформы для вычислительных платформ. Архитектура с более прямым управлением электропитанием может быть предусмотрена с использованием интегрированных регуляторов напряжения и, в некоторых вариантах осуществления, также прямого интерфейса управления электропитанием (DPMI). Интегрированные регуляторы напряжения, такие как регуляторы напряжения, установленные на подложке (ISVR), описанные ниже, можно использовать для воплощения более быстрых, более тонко реагирующих переходов состояния электропитания. Кроме того, новая, более прямая архитектура управления электропитанием (DPMI) может быть развернута для более эффективного управления регуляторами напряжения и/или ISVR, используемыми для платформы.
В некоторых вариантах осуществления DPMI могут обеспечивать аппаратный протокол, позволяющий обеспечить непосредственный обмен запросами состояния активности и изменения состояния питания (то есть более прямой, чем в обычных подходах, основанных на ОС) между устройствами и модулем управления электропитанием (PMU), вместо необходимости прохода по обычной цепочке управления электропитанием на основе ОС. Этот механизм обеспечивает управление состоянием питания в режиме реального времени, который пригоден для быстрых и интегрированных VR, таких как ISVR.
В отличие от существующих подходов управления электропитанием на основе операционной системы платформы с DPMI могут более эффективно обходить операционную систему управления электроприводом, чтобы быстрее уменьшать питание, когда это необходимо, например, в ответ на изменение состояния питания или уведомление со стороны устройств, которые находятся или будут менее активными или неактивными. Когда используются IVR, быстрые переходы состояния питания могут быть достигнуты, например, за время порядка микросекунд и даже наносекунд, и они могут быть интегрированы в платформы, включающие в себя, в систему на микросхемах (SoC) с другими функциональными модулями, чтобы обеспечить более плотное и более тонкое управление подачей электроэнергии. Например, в DPMI, IVR могут быть интегрированы в функциональные устройства, с тем, чтобы быстро, практически в режиме реального времени, переходить в состояние или выходить из состояния низкого потребления энергии, состояние ожидания или спящий режим с минимальным потреблением энергии, для достижения беспрецедентной эффективности использования электропитания. Это, например, может быть предпочтительным для мобильных устройств, таких как нетбуки, смартфоны и платформы мобильных устройств для работы в Интернет.
В некоторых вариантах осуществления архитектура прямого интерфейса управления электропитанием (DPMI или прямого PMI, для краткости) предусмотрена на уровне аппаратных средств платформы с возможностью IVR. Поскольку в модуле управления электропитанием системы (PMU) интегрирован IVR, прямой PMI может обеспечить для устройств возможность сообщать о переходе состояния питания непосредственно в PMU (например, обходя ОС), и PMU может затем выполнять изменения состояния питания без использования ОС и ее интегрированной среды управления электропитанием, в результате чего происходит ускорение управления электропитанием и также экономия электроэнергии, которая, в противном случае, была бы использована существующей ОС. Множество (если не большинство) действий по управлению электропитанием, по существу, могут быть прозрачными для ОС, в результате чего обеспечивается дополнительная аппаратная архитектура управления электропитанием. Время отклика на изменения состояния питания может быть улучшено, и платформа типично требует меньше ресурсов CPU для действий, связанных с управлением электропитанием. Поэтому общая эффективность использования питания платформы может быть улучшена.
На фиг.1А показана схема обобщенной архитектуры, в которую встроена возможность управления электропитанием на основе прямого PMI (DPMI). Представленный участок платформы включает в себя интегрированную среду 102 управления электропитанием ОС, модуль 104 управления электропитанием (вместе с Р-кодом 105), логическую схему 106 интерфейса прямого управления электропитанием (DPMI), регуляторы 108 напряжения и устройства 1ХХ, все соединенные вместе, как показано. В устройствах 1ХХ предусмотрены VR 108, которыми, в свою очередь, управляют с помощью платформы 102 РМ ОС, PMU 104, и логическую схему 106 DPMI. Устройства называются “1ХХ”, поскольку к ним обращаются различные самые разные устройства или модули на платформе, или даже внешние для нее, некоторые из которых показаны на фиг.1В.
Во время работы PMU (со стороны логической схему 106 DPMI) и платформа РМ ОС работают для воплощения управления электропитанием общей платформы. Платформа ОС может быть аналогична существующей платформе РМ ОС, но со специфичными для DPMI добавлениями поверх ядра ОС. В некоторых вариантах осуществления пользователи могут выбирать возможность включения или отключения функций управления электропитанием на платформе DPMI. Это может быть предусмотрено для обеспечения обратной совместимости программных приложений с новыми платформами, воплощенными на платформе DPMI.
Преимущество PMU и DPMI, как будет описано здесь, состоит в том, что они могут работать в пределах платформы 102 схемы управления электропитанием ОС или независимо от нее. Таким образом, например, работая в пределах нее, ОС может воплощать обычные схемы состояния электропитания, такие как ACPI, и т.д., и одновременно, логическая схема PMU и DPMI могут работать для управления питанием на более низком уровне (более высокая гранулярность, более быстрый отклик), во многих случаях, без необходимости перехода через платформу ОС. ОС может находиться в данном состоянии электропитания (например, состояние G или состояние s), и PMU 104/DPMI 106 может управлять электропитанием устройств, соответственно. Например, в зависимости от заданного состояния ОС/системы, PMU/DPMI может изменять состояния электропитания устройства медленнее, быстрее и/или по-другому, например может инструктировать что-то, чтобы оно оставалось включенным или выключенным или в режиме уменьшенного потребления энергии в течение более длительного или более короткого времени.
PMU выполняет изменения электропитания, управляя фактическими уровнями электропитания, поступающими с регуляторов 108 напряжения. Он может устанавливать эти уровни, основываясь на текущем состоянии электропитания, а также на событиях реального времени или изменениях условий, информацию о которых он может получать от ОС, из DPMI, или от датчиков платформы или других источников информации. PMU 104 может быть воплощен с любой соответствующей схемой или модулем схемы, включающей в себя, но без ограничения, микроконтроллер. Количество энергии, подаваемое VR (обычно управляемое через регулируемые уровни подаваемого напряжения), диктуется различными факторами, не последний из которых представляет состояние питания для системы/платформы/устройства, конкретное действие (или бездействие) устройства, ожидаемая предстоящая активность устройства и другие факторы, относящиеся к эффективности управления электропитанием. Политики для обработки этих и других факторов, для управления количеством электропитания, которое должно быть подано в VR, могут быть воплощены путем комбинирования исполняемых программных или встроенных программных средств (называются здесь “Р-кодом” 105), выполняемых логической схемой 106 PMU и DPMI.
Регуляторы 108 напряжения могут быть воплощены с любой соответствующей комбинацией соответствующих регуляторов напряжения. Как правило, используются преобразователи из постоянного в постоянный ток компенсирующего типа, но их можно использовать в комбинации с регуляторами других типов. Предусматривается, что несколько, если не все VR, могут использоваться для обеспечения управляемых переменных поставок в отдельные устройства платформы. Регуляторы могут иметь разные размеры, и больше чем один из них могут использоваться вместе, для определения домена VR, для подачи питания в заданное устройство.
В некоторых вариантах осуществления, так называемые регуляторы напряжения, установленные на подложке (ISVR), могут использоваться. Они более подробно описаны ниже, но обычно обеспечивают для нескольких, если не для множества VR, возможность их, по существу, интегрирования в одну или больше микросхем, которые расположены в непосредственной близости к одной или больше микросхемам, образующим устройства, питание для которого они предоставляют. В некоторых вариантах осуществления они могут быть частично, или даже полностью, интегрированы в микросхемы, которые имеют свои ассоциированные устройства, для которых требуется обеспечить питание.
Логическая схема 106 DPMI используется для помощи PMU более эффективно и рационально обрабатывать сообщения из устройств и в некоторых вариантах осуществления для обработки сообщения устройства непосредственно, помимо PMU. Логическая схема 106 DPMI может быть воплощена с использованием любых соответствующих логических схем, включая в себя, но не без ограничения, любую соответствующую конфигурацию комбинаторной логики, последовательной логики, конечных автоматов, контроллеров и/или любых других соответствующих электрических схем.
Недостаток традиционных PMU, воплощенных с помощью микроконтроллеров, состоит в том, что с их помощью может быть затруднительно обеспечить своевременное обслуживание всех разных запросов или уведомлений от разных устройств одновременно и эффективно. Например, несколько устройств могут завершить свои задачи и пытаются уведомить PMU о том, что они находятся в режиме ожидания и/или в другом случае готовы к переходу в состояние низкого потребления энергии. Логическая схема DPMI может функционировать для того, чтобы быстро управлять такой трафик устройств и передавать его в PMU требуемым образом. Например, она может устанавливать приоритеты для разных сообщений, например, в зависимости от типа сообщения или от того, откуда оно было отправлено. Кроме того, в некоторых вариантах осуществления, DPMI может быть выполнен с возможностью непосредственно обрабатывать сообщения, такие как запросы на изменение состояния питания или уведомления о рабочей нагрузке. Логические схемы PMU и/или DPMI могут обрабатывать и/или воплощать изменения состояний на платформе для каждого устройства и одновременно, перенаправлять изменения в ОС таким образом, что платформа РМ ОС будет иметь возможность управлять электропитанием общей платформы, но в то же время изменения могут быть обработаны более быстро. Это может привести к последовательным улучшениям с точки зрения экономии электроэнергии, например к переходу в состояние с более низким потреблением энергии, порядка на несколько миллисекунд быстрее, чем при переходе через ОС, но такая последовательная экономии суммируется с течением времени и для множества различных работающих устройств.
На фиг.1В показана блок-схема общей платформы, которая отвечает за воплощение архитектуры управления электропитанием на платформе DPMI, показанной на фиг.1А. Она содержит одно или больше ядер 103, устройства/интерфейсы 105 ввода/вывода, запоминающие устройства 107, графический процессор 109, устройства 111 приемопередатчика, и PMU 104, и DPMI 106 для управления VR (не показаны) для подачи питания в устройства, включая в себя одно или больше ядер. Соединительные линии не показаны для упрощения, поскольку любые из всех устройств могут быть соединены, непосредственно или опосредованно, друг с другом, например, с использованием одной или больше шин, или соединений из точки в точку, в зависимости от конкретных вариантов осуществления и конструктивных решений. Аналогично, VR не показаны, поскольку они распределены по всей платформе (например, в разных соседних микросхемах или полностью или частично интегрированы в первичную микросхему платформы) для формирования домена VR для подачи питания в различные устройства. Некоторые VR могут быть интегрированы в микросхему или микросхемы, содержащие различные устройства, или они могут составлять часть одного или больше отдельных модулей, расположенных рядом с устройством, в которое они подают питание.
Ядра выполняют платформу РМ ОС и работают вместе с логическими схемами PMU и DPMI для управления различными VR, которые передают электропитание в устройства. Платформа может воплощать персональный компьютер, сервер, портативное вычислительное устройство, такое как смартфон, нетбук, планшетный ПК, или любое другое соответствующее вычислительное устройство.
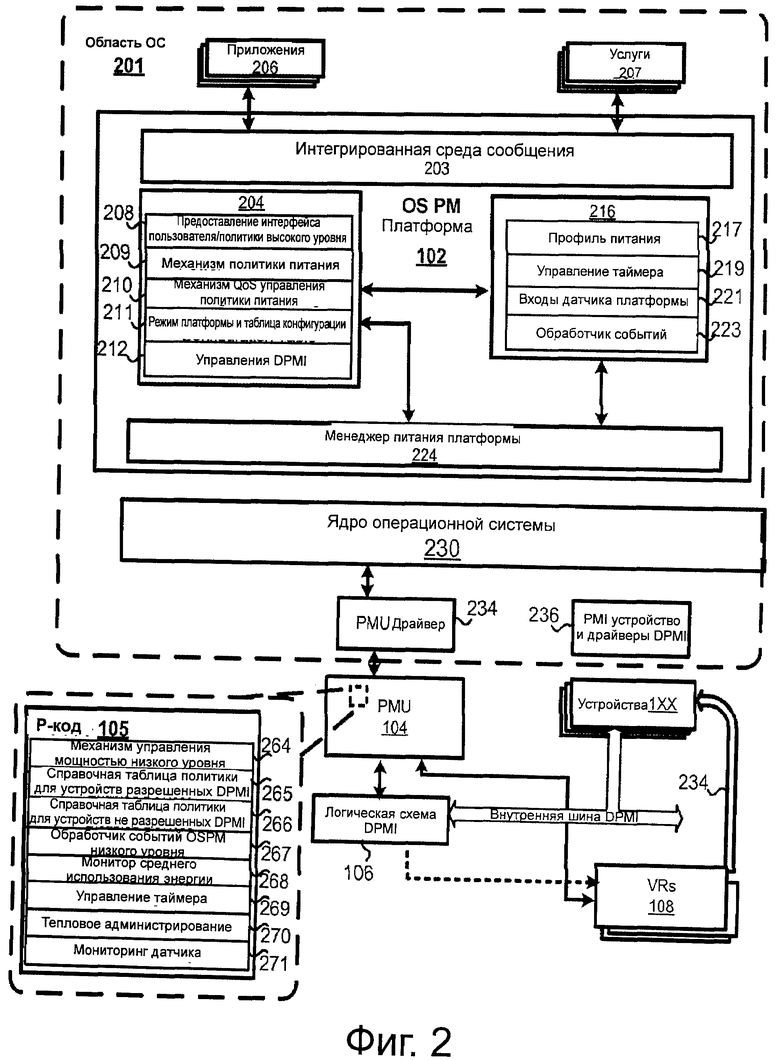
На фиг.2 показана платформа управления электропитанием по фиг.1А, но более подробно. Наряду с доменом ОС 201, показаны PMU 104 с исполнительным Р-кодом 105, логическая схема 106 DPMI, регуляторы 108 напряжения и устройства 1ХХ, все соединенные вместе, как показано. Также представлена внутренняя шина 250 DPMI, предназначенная для соединения логической схемы 106 DPMI с устройствами 1ХХ. Логическая схема DPMI соединена с агентами устройств через интерфейсы устройств для обмена данными через шину 250 с логической схемой DPMI. (Хотя используется термин "шина", следует понимать, что можно использовать другие соединения, помимо шины или шин. Такие соединения включают в себя соединения из точки в точку и даже беспроводные соединения.)
Кроме платформы 102 OS РМ, домен ОС содержит приложения 206, услуги 207, ядро 230 операционной системы, драйвер 234 PMU, и устройство PMI, и драйверы 236 DPMI.
Платформа 102 OS PM содержит платформу 203 сообщения, различные модули, относящиеся к или влияющие на управление 204, 216 электропитанием, и менеджер 224 электропитания платформы. Модули 204/216 управления электропитанием включают в себя модуль 208 предоставления политики высокого уровня/интерфейса пользователя, механизм 209 политики электропитания, механизм 210 качества обслуживания (QoS) при управлении электропитанием, таблицу 211 режима платформы и конфигурации, модуль 212 управления DPMI, модуль 217 профиля электропитания, модуль 219 управления таймера, модуль 221 ввода датчика платформы и модуль 223 обработчика событий.
Платформа 203 сообщения используется, как интерфейс между исполнительными приложениями 206 (программа CAD, редактор кинофильмов и т.д.), и работающими услугами 207 (например, устройство мгновенных сообщений и т.д.), и модулями управления электропитанием. От приложений и работающих услуг модули управления электропитанием получают информацию, относящуюся к электропитанию, такую как состояния активности, оценки длительности задачи и т.д. В зависимости от конкретных воплощенных политик, в модулях 204/216 управления электропитанием эта информация может использоваться для установки соответствующих состояний питания для различных платформ, например от платформ в целом, до уровней устройства. Менеджер 224 электропитания платформы составляет интерфейс между модулями и ядром 230 ОС. (Следует иметь в виду, что здесь показаны и описаны аспекты ОС, относящиеся к управлению электропитанием; и при этом не описаны ОС, относящиеся ко всем свойствам.)
Платформа 102 OS PM обеспечивает управление политикой высокого уровня и конфигурацию и определяет переходы состояния электропитания, основанные, помимо прочего, на статусе приложения и моделях использования. В этом аспекте платформа OS PM обычно должна обеспечивать обратную совместимость с существующими воплощениями OS PM. Поэтому существующие инфраструктуры программного обеспечения приложения могут поддерживаться архитектурами, воплощенными на платформе DPMI.
Менеджер 212 DPMI и модуль 208 интерфейса пользователя используются для активации или деактивации свойств DPMI для заданного устройства. Когда агент DPMI для устройства 1ХХ деактивируют, такой механизм управления электропитанием такого устройства будет, в принципе, тем же, что и в вариантах воплощения операционной системы без DPMI. Когда агент DPMI устройства активирован, его управление электропитанием может быть затем выполнено в значительной степени, через логическую схему 106 DPMI и Р-код 105 PMU, и становится в значительной степени прозрачным для ОС и приложений/услуг. В этом случае PMU 104 все еще может отвечать на указания по управлению электропитанием из платформы 102 РМ ОС, но большая часть действий по управлению электропитанием происходит между PMU и устройствами.
Устройство передает состояние активности и запрос на изменение состояния электропитания в PMU 104 в режиме реального времени, и PMU может затем быстро регулировать заданную шину электропитания (и, возможно, подсистемы, такие как, например, дерево синхронизации) с переходом в состояние с низким потреблением энергии и "восстановлением" в состояние с высоким потреблением энергии, в соответствии с необходимостью, обеспечивая, таким образом, для платформы возможность достижения повышенной эффективности использования электроэнергии. Архитектура управления электропитанием с использованием DPMI улучшает эффективность использования электропитания не только в результате быстрого перехода в состояние электропитания, но также путем уменьшения использования компьютерных ресурсов и CPU, необходимых для платформы OS РМ.
Для размещения расширений архитектуры DPMI в пределах существующей платформы OS РМ механизм 210 QoS управления электропитанием имеет свойства, который отражают режимы управления электропитанием, когда DPMI активирован. Аналогично, таблица 211 режима и конфигурации платформы может включать в себя режимы для активированных состояний DPMI, в дополнение к режимам, уже определенным для существующих OS РМ.
Средний уровень между платформой 102 OS РМ и аппаратными средствами (PMU, устройствами, VR и т.д.) включает в себя драйверы 234 PMU и драйверы 236 устройства. В некоторых вариантах осуществления эти драйверы могут быть воплощены с использованием встроенного микропрограммного обеспечения. Драйвер 234 PMU обеспечивает возможность для PMU 104 связываться с ОС и программным приложением/услугой. Прежде всего, он может представлять собой (если не только) механизм для инструкций управления электропитанием канала между платформой 102 OS РМ и PMU 104 для не-DPMI активированных устройств. Для DPMI активированных устройств, PMU все еще может связываться с событиями, влияющими на электропитание платформы 102 OS РМ, сообщения которых передают между платформой 102 OS РМ и PMU 104, в то время как обмен большинством запросов на управление электропитанием можно выполнять через инфраструктуру DPMI (PMU 104, логическую схему 106 DPMI и внутреннюю шину 250 DPMI).
Драйверы 236 устройства обеспечивают программные зацепки, обеспечивающие возможность для ОС программных средств и приложений конфигурировать устройства в соответствующих режимах управления электропитанием и активировать/деактивировать их функции DPMI.
Самый низкий уровень DPMI в представленной интегрированной среде управления электропитанием платформы представляет собой уровень аппаратных средств, PMU 104 с Р-кодом 105, логической схемой 106 DPMI, VR 108 и устройствами 1ХХ. Успех уровня аппаратных средств для воплощения быстрого отклика на управление электропитанием основан на плотной интеграции PMU 104, VR 108 и устройства 1ХХ (например, устройства Bluetooth, устройства CDMA, устройства USB и т.д.) В некоторых вариантах осуществления, множество (если не большинство) устройств будут интегрированы с PMU и даже, в некоторой степени, VR, в одной SoC, для полного использования быстрого и тонкого управления шиной электропитания. Конечно, могут присутствовать устройства, которые не интегрированы в такую SoC для данной платформы. В этих случаях некоторые VR в SoC могут быть выделены для поддержки шин питания для внешних устройств.
Для устройств, не предназначенных для работы DPMI, PMU, вероятно, первоначально выполняет инструкции и управление электропитанием, которые происходят из платформы 102 OS PM. Однако для устройств, предназначенных для работы с DPMI, функция PMU может быть двузначной. С одной стороны, она продолжает обрабатывать директивы управления электропитанием, происходящие из OS PM. С другой стороны, она дополнительно действует, как автономный агент для непосредственного управления состояниями электропитания устройства, через политики, определенные в Р-коде 105 и во взаимодействии с логическими схемами DPMI, без необходимости перехода через интегрированную среду OS PM.
Аппаратные средства DPMI, по существу, содержат логическую схему 106 DPMI, внутреннюю шину 250 DPMI и агенты DPMI в устройствах. Внутренняя шина 250 совместно используется между интегрированными устройствами и используется для передачи статуса активности устройства и запроса состояния электропитания в PMU 104 через логическую схему 106 DPMI. Логическая схема 106 DPMI, помимо других, может управлять обменом данных через шину внутренней и внешней DPMI, разрешает столкновения по шине между устройствами, действует, как концентратор для запросов на изменение состояния питания от устройств, и устанавливает приоритеты и передает запросы на состояние питания в PMU 104. Логическая схема 106 DPMI также может обрабатывать порт расширения DPMI (показанный в последующих вариантах осуществления) для обеспечения для внешних устройств возможности управления через протокол DPMI, в котором в их шины подают электропитание из VR 108 таким образом, когда они интегрированы с PMU и контроллером DPMI.
Р-код 105 функционирует, как программа низкого уровня для PMU, когда она воплощена, как контроллер (эквивалент соответствующего кода/логики может использоваться для альтернативных вариантов осуществления PMU). Он включает в себя механизм 264 управления электропитанием низкого уровня, справочную таблицу 265 политики устройства, обеспечивающую возможность использования DPMI, справочную таблицу 266 политики устройства, не обеспечивающую возможность использования DPMI, обработчик 267 событий OS PM низкого уровня, модуль 268 отслеживания использования среднего значения электропитания, модуль 269 управления таймером, модуль 270 теплового управления и модуль 271 отслеживания датчика. Можно видеть, что новые функции (например, политика, относящаяся к DPMI, обработка событий) могут быть интегрированы в обычную функцию PMU (например, тепловое управление, управление временных характеристик).
Механизм 264 управления электропитанием низкого уровня обрабатывает события состояние электропитания, передаваемые через логическую схему 106 DPMI, и запрашивает происходящее из интегрированной среды 102 OS PM. Политика состояния питания построена на Р-коде, помимо прочего, через справочные таблицы 265, 266, для обеспечения быстрых изменений состояния питания. Конкретное состояние электропитания для заданного устройства обычно, в принципе, соответствует конкретным установкам напряжения, которыми управляют с помощью PMU через команду или команды в соответствующий VR 108. PMU обрабатывает запросы/команды на изменения состояния электропитания из интегрированной среды OS PM или из DPMI, в соответствии с заданными зависимостями, загруженными в справочные таблицы политики, установленными на целевую установку напряжения VR. Р-код также обеспечивает для PMU возможность отслеживания среднего использования электропитания, например, для заинтересованных устройств, используя монитор 268 среднего использования электропитания и модули 271 отслеживания датчика.
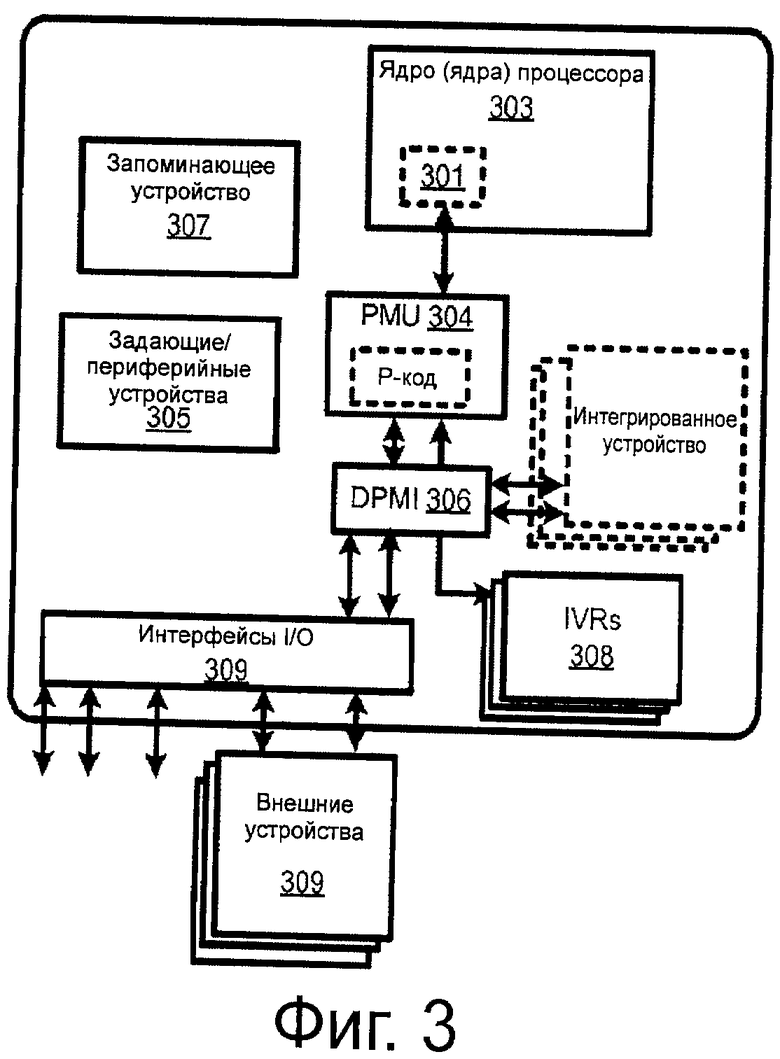
На фиг.3 показана блок-схема платформы SoC с архитектурой DPMI в соответствии с некоторыми вариантами осуществления. Она, в общем, содержит одно или больше ядер 303, PMU 304, запоминающее устройство 307, устройство синхронизации/периферийное устройство 305, логическую схему 306 DPMI, интерфейсы 309 I/O, VR 308 и интегрированные устройства в пределах Soc, которые получают питание от IVR 308. Также показаны внешние устройства 311, состоянием питания которых можно управлять с помощью PMU 304 и логической схемы 306 DPMI. SoC можно использовать для любого соответствующего приложения, такого как, например, нетбук, так называемый смартфон, или любого другого устройства, в частности, для портативных устройств, в которых важно сохранение энергии.
Одно или больше ядро (ядер) процессора выполняют операции интегрированной среды 301 OS PM, которая может быть аналогична только что описанной выше, за исключением того, что она может иметь большее или меньшее количество модулей, организованных по-разному, для размещения конкретных элементов конструкции SoC. Аналогично, PMU 304 (которое включает в себя Р-код) и логическую схему 306 DPMI также могут быть воплощены, как описано в предыдущем разделе. Интегрированные устройства соответствуют устройствам (функциональным модулям, модулям) в SoC, которые могут работать в управляемых разных состояниях питания. IVR 308 выполнены отдельно от VR или областей VR, используемых для подачи питания в устройства, таким образом, чтобы подачей питания в каждое устройство можно было по отдельности управлять. IVR могут быть воплощены с VR, которые являются полностью или частично интегрированными, либо в микросхему SoC, или в отдельную микросхему, которая расположена в непосредственной близости к микросхеме SoC, например, как описано ниже со ссылкой на фиг.7.
Со ссылкой на фиг.4, представлена архитектура OS PM-DPMI в соответствии с дополнительными вариантами осуществления. Эта архитектура управления электропитанием может использоваться для SoC на фиг.3, а также для других платформ, в частности для портативных. Такая архитектура управления электропитанием аналогична показанной на фиг.2, за исключением того, что она дополнительно включает в себя аппаратное и программное обеспечение для внешних устройств, и также, в частности, представлены устройства (внешние или внутренние), которые могут получать питание от IVR 476 или других VR 456. Она также включает в себя регистры 480 конфигурации пропускания дерева тактовой частоты, которыми может управлять PMU 404 для более эффективного управления электропитанием.
В данном варианте осуществления DPMI VR (IVR) 476 используется для подачи питания во внутренние устройства, интегрированные с IVR в пределах того же варианта 458 осуществления, и другие VR (например, IVR) 456, используются для подачи питания в устройства, которые не являются интегрированными с IVR в пределах того же варианта 439 осуществления. Для поддержки разных типов устройств (интегрированных с IVR и не интегрированных с IVR) предусмотрены раздельные драйверы PMI/DPMI (436 и 437) для двух отдельных путей к интегрированной среде 402 OS PM. Также включен порт 454 расширения DPMI для обмена данными между PMU 104/ логической схемой 406 DPMI и не интегрированными устройствами 439.
Внешний порт DPMI (шина или другое взаимное соединение) может совместно использоваться внешними устройствами и может использоваться для обмена данными состоянием активности внешних устройств и запросами состояния питания в логическую схему 406 DPMI. Архитектура на платформе DPMI обеспечивает фундаментальную инфраструктуру для интегрирования устройств (как внутренних, так и внешних устройств) в интегрированную среду DPMI более высокой эффективности, которая обеспечивает возможность интегрирования внешних устройств третьей стороны, без необходимости жертвовать эффективностью использования электропитания платформы, когда внешние устройства третьей стороны могут включать агенты DPMI в свою конструкцию для обозначения состояния активности устройства и запросов состояния электропитания в логическую схему у DPMI. В некоторых вариантах осуществления протокол DPMI может включать в себя справочную таблицу, например, в Р-коде и/или логике DPMI, с определенными политиками перехода между состояниями электропитания для устройств. Поставщики устройства третьей стороны могут получить возможность внедрять свою информацию о политике управления электропитанием в справочные таблицы, например в Р-коде платформы, и, таким образом, имеют полную свободу, для определения стратегии перехода в состояние электропитания для своих устройств, для достижения улучшенной эффективности использования электроэнергии.
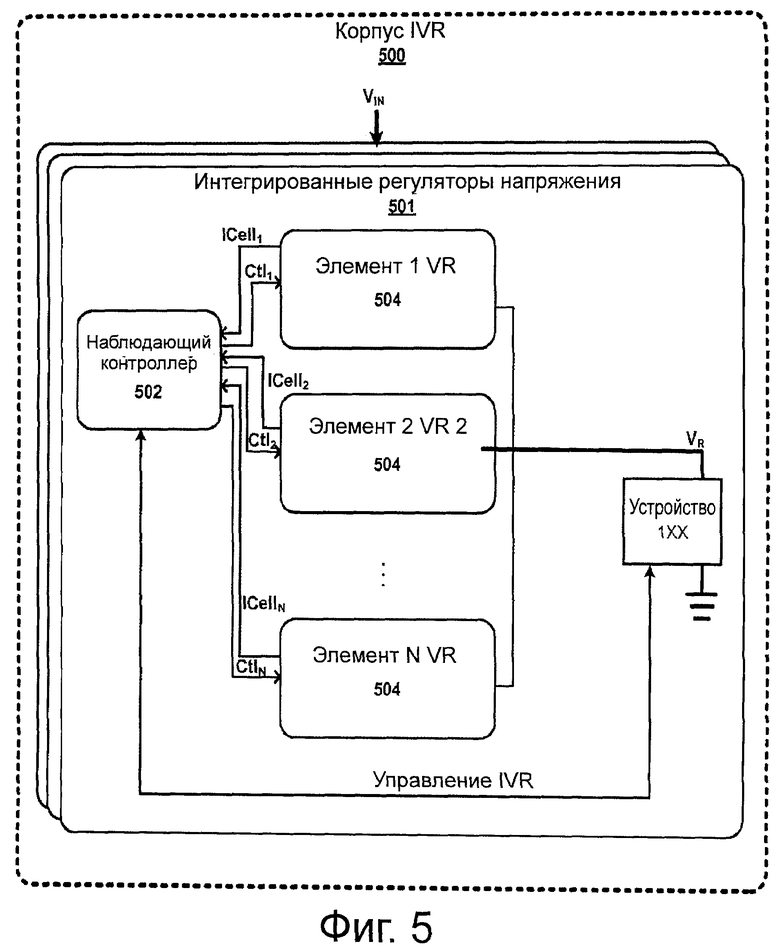
На фиг.5 показаны интегрированные (одноэлементные или многоэлементные) регуляторы 501 напряжения (IVR) в корпусе 500 платформы. Каждый VR 501 подключен так, что оно обеспечивает регулируемую подачу VR напряжения в устройство 1ХХ платформы. Каждый VR, в общем, содержит контроллер 502 наблюдения и один или больше элементов 504 (элемент 1 VR - элемент N VR) регуляторов напряжения (VR), соединенных вместе, как показано.
Отдельные выводы элемента VR соединены вместе для получения регулируемого выходного напряжения VR питания. Наблюдательный контроллер 502 соединен с элементами 504 VR для управления элементами (для поддержания регулируемого напряжения в соответствии с командой с PMU) на платформе информации загрузки от отдельных элементов (например, средний ток для каждого элемента, если он сгенерирован в элементе, или ток выборки), и/или по нагрузке устройства (например, выходному напряжению, общему выходному току и т.п.). Он может быть соединен с PMU и/или с логикой DPMI для приема из него команды на подачу (например, VID) и, возможно, другой информации, для предоставления соответствующего уровня подачи энергии для нагрузки устройства.
В некоторых вариантах осуществления логика DPMI может принимать из устройства (например, процессора, приемопередатчика, интерфейса USB, аудиокодека и т.д.) информацию о состоянии активности, для управления элементами на платформе соответствующего состояния активности устройства, а также как на его отслеживаемой потребности тока. В некоторых вариантах осуществления наблюдающий контроллер может во время работы соединяться с соответствующим количеством элементов (в пределах диапазона, определенного его состоянием активности устройства) на платформе тока нагрузки, потребляемого в данный момент времени. Наблюдающий контроллер 502 может содержать любую соответствующую схему для выполнения этой функции. Например, он может содержать контроллер (или другую схему модуля обработки); он может содержать дискретную логику и аналоговые компоненты, выполненные с определенным назначением управления элементами 504 VR; или он может содержать комбинацию логических элементов, аналоговых схем и схемы контроллера с более общей функцией.
В некоторых вариантах осуществления каждый элемент 504 VR может составлять независимо функционирующий регулятор напряжения со своим собственным контроллером и схемой преобразования энергии. Например, VR 504 может содержать контроллер, соединенный с массивом понижающих напряжение переключателей и выходных блоков, расположенных в многофазной конфигурации и соединенных, как показано, для обеспечения регулируемого входного напряжения VR. В некоторых вариантах осуществления выходные блоки могут содержать соединенные индуктивности, интегрированные на кристалле IVR и/или в корпусе. При подключенных индуктивностях степень насыщения индуктивности, по существу, (если вообще) не зависит от тока нагрузки, в результате чего получается преимущество, состоящее в том, что элемент питания (элемент 504 VR) может подавать ток выше его непрерывного номинала в течение короткой длительности времени, в зависимости от определенных тепловых условий и ограничений.
В некоторых вариантах осуществления элементы 504 VR могут быть аналогично разработаны относительно друг друга, имея сравнимые (если не эквивалентные) возможности по подаче выходного тока в установившемся состоянии. Например, каждый из них может быть разработан с возможностью эффективной и надежной работы в диапазоне от 1 ампера до 5 ампер, или от 100 миллиампер до 1 ампера, и обеспечения регулируемого постоянного напряжения приблизительно 1 вольт или любого указанного напряжения для заданного состояния питания устройства. Кроме того, они могут быть разработаны для работы с достаточно высокой частотой переключения таким образом, что они могут динамически быть соединены и разъединены, в соответствии с рабочими частотами нагрузки 1ХХ устройства, для эффективного противодействия динамически изменяющимся условиям нагрузки. Например, достаточный отклик может быть доступен в каждом элементе, имеющем частоту переключения в диапазоне от 20 МГц до 100 МГц (или даже выше), что позволяет обеспечить быстрый отклик нагрузки, например порядка десятков наносекунд.
(Следует отметить, что в представленном варианте осуществления, элементы VR, включающие в себя свои собственные индуктивности, могут быть интегрированы в одной микросхеме, например на первичном кристалле платформы или на кристалле и на подложке, как, например, при использовании пакета SoC. В качестве альтернативы, они могут составлять часть отдельного кристалла, который расположен рядом с устройством, включающим в себя кристалл, и могут представлять собой часть общего IC корпуса, имеющего множество кристаллов. Непосредственная близость VR, или областей VR, к их соответствующим нагрузкам устройств может обеспечить возможность их возбуждения с частотой, превышающей 20 МГц, например, без чрезмерных потерь на переключение.)
На фиг.6 показан вариант осуществления многоэлементного IVR 601, соединенного так, чтобы обеспечивались регулируемые подачи напряжения для соответствующих устройств 611 в платформе 600, воплощенной в DPMI. IVR 601 имеет множество областей 604 (6041-604N) многоэлементного VR, каждая из которых содержит множество элементов, как описано выше, и каждый из которых соединен с соответствующим устройством 611 (от 6111 до 611N) на платформе 600. Каждый IVR 604 содержит множество элементов, которыми управляют для эффективной работы, например, в соответствии с процедурами, показанными на фиг.8-10, для обеспечения подачи регулируемого напряжения в его соответствующее устройство. Как показано в IVR на фиг.5, IVR 601 имеет наблюдающий контроллер 602, который управляет каждой из областей 604 IVR, для включения и отключения элементов в пределах области, на основе информации из PMU 614, например на основе информации о состоянии электропитания устройства, предоставляемой посредством логической схемы 616 DPMI.
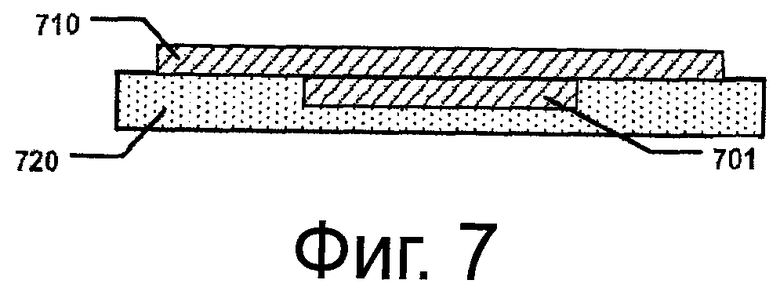
На фиг.7 показан вид в поперечном сечении корпуса платформы, такого как, например, SoC или интегральной схемы (1C) многоядерного процессора. Он содержит кристалл 701 многоэлементного интегрированного регулятора напряжения (IVR) и кристалл 710 платформы, воплощенный в DPMI, соединенные вместе, как показано. Кристалл 701 IVR встроен в подложку 720 корпуса, в то время как кристалл платформы установлен на подложке 720 и рядом с кристаллом 701 IVR для эффективной передачи сигнала. (В данном варианте осуществления подложка 720 используется, как подложка пакета, как для платформы 710, так и для IVR 701. Следует отметить, что кристаллы могут активно входить в контакт друг с другом или могут не быть в контакте друг с другом. Они могут иметь один или больше других материалов, расположенных между ними по некоторым или по всем примыкающим участками поверхности. Такие материалы можно использовать для обеспечения конструктивной стабильности с целью передачи тепла, электроэнергии и сигнальных решеток, и т.п.)
Кристалл 701 IVR может содержать одну или больше областей многоэлементных VR, в то время как кристалл 710 платформы DPMI может содержать одно или больше устройств, как описано выше. В такой конфигурации корпуса, когда кристаллы установлены рядом друг с другом, элементы цепей для областей VR могут быть расположены более близко к их ассоциированным устройствам. Это может обеспечить возможность получения достаточно электропроводных каналов (например, через столбики припоя или другие контакты) для подачи относительно больших токов в устройства. (Следует понимать, что любая соответствующая конфигурация корпуса с использованием одного или больше кристаллов, для воплощения устройств и VR, может быть воплощена и находится в пределах объема настоящего изобретения. Например, кристалл IVR может находиться "поверх" кристалла платформы вместо "ниже" него. В качестве альтернативы, он может быть расположен рядом с ним, частично напротив него, или они могут составлять часть одного и того же кристалла.)
На фиг.8 показана процедура, которая может быть выполнена наблюдающим контроллером для определения допустимого диапазона активного элемента, то есть диапазона, определяющего, какое количество элементов в многоэлементном VR могут быть активными на платформе, состояние активности его устройства, и для управления количеством активных элементов так, чтобы они находились в пределах этого диапазона. Например, это может быть желательным для исключения добавления или сброса слишком большого количества элементов в ответ на ложные изменения тока нагрузки для заданного состояния активности электропитания. Сами пределы диапазона могут быть заранее определены для каждого возможного состояния активности устройства/системы/платформы на основе ожидаемой максимальной нагрузки в переходном процессе и состояния статической нагрузки для состояния активности.
Процедура начинается на этапе 802, когда происходит изменение состояния активности, которое, например, может быть передано в наблюдающий контроллер из PMU в ответ на запрос из устройства. Например, когда устройство представляет собой графический процессор, агент устройства в графическом процессоре может передавать в логику DPMI изменение состояния для процессора. На этапе 804 устанавливают новые максимальные и минимальные пределы (nmax, nmin). Соответствующие пределы диапазона могут быть определены с использованием любой соответствующей методологии. Например, они могут быть получены из справочной таблицы с пределами, определенными на платформе состояния активности нагрузки.
Если присутствующее количество активных элементов (nасt) находится за пределами диапазона, установленного пределами (nmах, nmin), его обновляют с помощью процедуры. На этапе 806, если количество присутствующих в настоящее время активных элементов (nact) больше, чем nmах, тогда на этапе 808 nact изменяют на nmах и переходят к концу процедуры, до тех пор, пока состояния активности не изменятся снова. В противном случае, переходят на этап 810 и проверяют, не является ли nact слишком малым, что обозначает, что элементы работают со слишком низкой эффективностью. Если nact меньше, чем nmin, тогда на этапе 812 nact изменяют на nmin, и процедура переходит к концу и ожидает другого изменения состояния.
На фиг.9 показана процедура для определения количества (nact) элементов, которые должны быть активными, на основе разрешенного диапазона активных элементов (например, как описано в предыдущем разделе) и по значению "тока на активный элемент" (ICell). Используемый здесь термин "ток на активный элемент" и, таким образом, "ICell" относится к значению тока (тока нагрузки), например, текущая оценка, расчет, измерение или их комбинация, соответствующие току в активном элементе. Это значение может быть достигнуто, прямо или опосредованно, множеством различных путей. Например, если элементы достаточно сбалансированы относительно друг друга, образцовое или среднее значение от любого из активных элементов может быть достаточным. С другой стороны, если они недостаточно и надежно сбалансированы, тогда среднее значение или выборка из элемента наихудшего случая (например, элемента с максимальным током) может использоваться. Кроме того, не обязательно имеет значение, используется ли весь выходной ток нагрузки или ток для элемента. Например, наблюдающий контроллер может получить значение для общего выходного тока и либо управляет им непосредственно в направлении целевого значения (или целевого диапазона), или он может рассчитать по нему среднее значение тока на активный элемент по этому значению, например, если бы можно было правильно предположить, что нагрузки элемента сбалансированы, и тогда можно было бы управлять ими для достижения целевого тока на элемент. Кроме того, ток или сигнал тока в действительности может не быть рассчитан или может не отслеживаться. Таким образом, можно использовать сигнал напряжения (или другой), скоррелированный с током. В соответствии с этим должно быть очевидно, что определенный тип или способ для получения значения "тока на активный элемент" (ICell) не требуется для выполнения на практике описания настоящего изобретения, и, таким образом, изобретение не ограничено этим.
На фиг.9 показана процедура для управления ICell, для достижения целевого тока (Itarget), который в данном варианте осуществления является одинаковым для каждого состояния рабочей активности. (Следует помнить, что на эффективность преобразования энергии для каждого элемента не влияет величина общего тока нагрузки, а скорее, ток, обеспечиваемый элементом). Если "ток на активный элемент" (ICell) слишком мал, пытаются уменьшить количество активных элементов (nact) для увеличения "тока на активный элемент", и если он слишком большой, пытаются увеличить количество активных элементов для уменьшения "тока на активный элемент".
Первоначально, на этапе 902, определяют значение "тока на активный элемент" (ICell) (например, самый большой ток элемента среди активных элементов). Отсюда следуют два пути (слишком малый, слишком большой), которые могут выполняться одновременно. На первом пути (слишком малый) процедура определяет на этапе 904, поддерживается ли такое значение ICell в течение достаточного периода времени, то есть в течение достаточного окна. Это выполняют с целью определения стабильности для сбрасывания элементов в ответ на краткосрочные провалы. Если ICell имеет заданное значение (или ниже) в течение достаточного периода времени, тогда на этапе 906 определяют, что это значение ICell слишком мало. Например, как обозначено на этапе 906А, при определении, является ли ICell слишком малым, процедура должна отрегулировать ICell на величину, которая обратно пропорциональна количеству активных элементов, для смещения его с тем, чтобы сделать затруднительным отброс элемента по мере уменьшения nact. На этапе 906А ICell умножают на nact/(nact-1) для его смещения.
Если ICell не слишком мал, то процедура возвращается на этап 902, но если ICell фактически слишком малый, то на 908, где проверяют, не является ли количество активных в настоящее время элементов (nact) большим, чем nmin. Если nact больше, чем nmin, тогда процедура возвращается на этап 912 и последовательно уменьшает nact, то есть отбрасывает элемент и возвращается обратно на этап 902. Однако на этапе 908, если nact определили, как больший, чем nmin, тогда процедура переходит на этап 910 (оставляя nact на его начальном уровне) и обеспечивает выполнение процедуры сброса ножек переключения. При выполнении сброса ножек переключения электроэнергия может быть дополнительно сэкономлена в результате отброса одной или больше ножек переключения в активном элементе (элементах). Пример такой процедуры показан на фиг.10. Отсюда процедура возвращается обратно на этап 902.
(Сброс ножек переключения приводит к отключению одной или больше ножек переключения, которые соединены параллельно друг с другом, для управления мощностью, которая поступает на фазовую ножку, например, через индуктивность в фазе. Это отличается от сброса фазы, когда сбрасывают ножки фазы. При сбросе ножки переключения фазы остаются активными, но размер моста или переключателя, транзисторов эффективно регулируют для уменьшения или увеличения импеданса моста с тем, чтобы улучшить эффективность моста, как функцию тока нагрузки. Это выполняется путем разрешения или запрета выбранных комбинаций параллельных ножек переключения, которые составляют мост. Преимущество сброса ножек переключения в отличие от сброса фазы состоит в том, что такой сброс является прозрачным для работы схемы и может более эффективно использоваться с соединенными индуктивностями.)
"Слишком большой" путь из 902 будет описан ниже. На этапе 914 процедура определяет, не является ли значение ICell слишком большим. (Следует отметить, что вначале не подтверждается в отличие от другого пути, что значение ICell поддерживается в течение достаточного периода времени, поскольку в данном варианте осуществления требуется реагировать настолько быстро, насколько это фактически возможно для компенсации, например, мгновенного и постоянного повышения линии нагрузки. Учитывая это, логика, например специализированные логические схемы, для выполнения действий на этом пути может быть, в частности, разработана для быстрой обработки.)
Пример способа определения, является ли ICell слишком большим, представлен в позиции 914А. Здесь процедура определяет, является ли усеченное значение (ICell/Itarget)+1 большим, чем nact. (Следует отметить, что его смещают для определения того, что ICell является слишком высоким, в результате чего получают добавленный элемент или элементы). Если ICell слишком большой, тогда в позиции 916 количество активных элементов увеличивают. Например, в позиции 916А значение nact устанавливают равным усеченному значению (ICell/Itarget)+1. Таким образом, nact может быть увеличено больше, чем на 1, для быстрой компенсации выбросов тока. В других вариантах осуществления nact может быть просто постепенно увеличено или повышено с использованием другого способа. После увеличения nact процедура возвращается обратно в позицию 902.
Отключение элементов представляет собой эффективный способ повышения эффективности. Однако, как представлено в позиции 910 выше, после того, как будет достигнуто минимальное количество активных элементов, последующая регулировка размера транзисторного моста активного элемента (то есть уменьшение количества активных ножек переключения в их мостах) представляет собой другой способ улучшения эффективности. Это может быть выполнено в контроллерах остального активного элемента (элементов). Процедура для изменения количества активных ножек переключения в элементе может быть аналогична изменению количества элементов, как представлено в процедуре, показанной на фиг.10.
На фиг.10 показана процедура для определения, какое количество ножек переключения должно быть активным в активном элементе. Эта процедура аналогична процедуре, показанной на фиг.9, и, таким образом, не будет описана настолько же подробно. ILeg представляет собой аналог для ICell и представляет собой ток в каждом элементе переключения в элементе, и nLact представляет собой количество текущих активных ножек переключения. (Как и с ICell, ILeg может быть определено различными способами и может соответствовать общему току элемента, вместо его использования в качестве тока ножки. Таким образом, вместо ILeg, который представляет собой фактический ток в ножке, он может соответствовать общему выходному току элемента с соответствующим регулированием Itarget.)
В предыдущем описании и следующей формуле изобретения следующие термины следует рассматривать следующим образом: можно использовать термины "соединенный" и "связанный" вместе с их производными. Следует понимать, что эти термины не предназначены для использования в качестве синонимов друг друга. Скорее, в конкретных вариантах осуществления, "соединенный" используется для обозначения того, что два или больше элемента находятся в прямом физическом или электрическом контакте друг с другом. "Связанный" используется для обозначения того, что два или больше элемента взаимодействуют или воздействуют друг на друга, но они могут находиться или могут не находиться в прямом физическом или электрическом контакте.
На фиг.11 показана процедура того, как PMU определяет соответствующее действие состояния мощности IVR, на платформе сообщений о состоянии мощности из DPMI. Процедуры IVR, показанные на фиг.8, 9 и 10, представляют собой примеры таких действий состояния мощности, выполняемых наблюдающим контроллером IVR, для достижения высокой эффективности использования мощности.
Первоначально, в позиции 1102, PMU запрашивает логическую схему DPMI в отношении любого события состояния мощности. Отсюда проверяет, присутствует ли запрос на изменение состояния мощности, принятый DPMI, в 1104. Если через DPMI не поступили сообщения о событии состояния мощности, продолжают запрашивать, присутствует ли событие состояния мощности из интегрированной среды OSPM в позиции 1114. В позиции 1114, если событие состояния мощности OSPM отсутствует, переходят обратно к точке 1102 входа. Из 1114 процедура следует по потоку в 1110 и выполняет соответствующую процедуру Р-кода для выполнения запросов на состояние мощности OSPM и передает инструкции в наблюдательный контроллер IVR о необходимых процедурах IVR. После 1110 IVR выполняет выбранное действие в позиции 1112, например, регулируя напряжение/тактовую частоту подаваемой мощности, состояние дерева, определяя диапазон активных элементов IVR и т.д. Из позиции 1110 процедура затем переходит обратно к точке 1102 входа. В 1104, если присутствует событие состояния мощности DPMI, процедура затем переходит к процедуре в позиции 1106, которая определяет, присутствует ли событие состояния мощности OSPM с более высоким приоритетом, чем событие DPMI. Если событие состояния мощности OSPM имеет больший приоритет (например, на основе заданной политики), процедура возвращается в позицию 1110 для выполнения запроса OSPM. Если событие состояния мощности DPMI имеет более высокий приоритет в 1106, выполняется переход к процедуре 1108 и PMU проверяет справочную таблицу политики для определения правильных действий IVR для запроса состояния мощности для устройства, из которого происходит такое событие через DPMI. Затем передают инструкции в наблюдательный контроллер IVR о необходимых действиях IVR. Из позиции 1108, процедуры переходят в позицию 1110, и наблюдательный контроллер IVR выполняет требуемые процедуры.
Пример процедуры, показанный на фиг.11, выполняется постоянно, затем запросы состояния мощности, поступившие из устройств через DPMI, или события состояния мощности, поступившие из OSPM, будут обработаны в соответствии с заданным порядком приоритета. Наблюдающий контроллер IVR получает инструкции на выполнение необходимых действий и достигает цели управления мощностью платформы для поддержания высокой эффективности использования мощности.
Изобретение не ограничено описанными вариантами осуществления, но может быть выполнено на практике с модификациями и изменениями в пределах сущности и объема приложенной формулы изобретения. Например, следует понимать, что настоящее изобретение применимо для использования со всеми типами полупроводниковых интегральных схем (“IC”). Примеры таких интегральных схем включают в себя, но не ограничены этим, процессоры, контроллеры, компоненты набора микросхем, программируемые логические матрицы (PLA), микросхемы запоминающих устройств, сетевые микросхемы и т.п.
Также следует понимать, что на некоторых из чертежей, линии проводников сигналов представлены линиями. Некоторые из них могут быть более толстыми, что обозначает в большей степени используемые каналы передачи сигналов могут иметь метки с номерами, для обозначения номера составляющих каналов передачи сигналов, и/или иметь стрелки на одном или больше концах для обозначения первичного направления потока информации. Это, однако, не следует рассматривать, как ограничение. Скорее, такие добавленные детали могут использоваться в связи с одним или больше примерными вариантами осуществления для того, чтобы способствовать более простому пониманию схемы. Любые представленные линии сигнала, имеющие или нет дополнительную информацию, могут фактически содержать один или больше сигналов, которые могут быть переданы во множество направлений и могут быть воплощены с использованием любого соответствующего типа схемы сигнала, например цифровые или аналоговые линии, воплощенные с дифференциальными парами, оптоволоконные линии и/или асимметричные линии.
Следует понимать, что примерные размеры/модели/значения/диапазоны могут быть представлены, хотя настоящее изобретение не ограничено ими. По мере того как технология изготовления (например, фотолитография) совершенствуется с течением времени, ожидается, что могут быть изготовлены устройства с меньшим размером. Кроме того, хорошо известное соединение питания/заземления с микросхемами IC и другими компонентами могут быть показаны или могут быть не показаны на фигурах для простоты иллюстрации и описания, и так, чтобы не затенять изобретение. Кроме того, компоновки могут быть показаны в форме блок-схемы для того, чтобы исключить затенение изобретения, и также с учетом того факта, что специфика в отношении воплощения таких компоновок, показанных на блок-схемах, в значительной степени зависит от платформы, на которой настоящее изобретение должно быть воплощено, то есть такая специфика должна находиться вполне в пределах компетенции специалиста в данной области техники. В случае, когда конкретные детали (например, схемы) установлены по порядку для описания примерных вариантов осуществления изобретения, для специалиста в данной области техники должно быть понятно, что настоящее изобретение может быть выполнено на практике, без изменений или с изменениями этих конкретных деталей. Описание, таким образом, следует рассматривать как иллюстрацию, а не ограничение.




Изобретение относится к устройствам подачи питания в вычислительных системах. Техническим результатом является повышение быстродействия управления подачей питания в режиме реального времени. Согласно настоящему изобретению используют прямое управление за счет интегрированных регуляторов напряжения, а также с использованием прямого интерфейса управления электропитанием (DPMI) для обмена сообщениями о состоянии электропитания. Интегрированные регуляторы напряжения, такие как регуляторы напряжения на кремнии (ISVR), можно использовать для выполнения более быстрых, более высокочувствительных переходов состояний электропитания. 3 н. и 20 з.п.ф-лы, 12 ил.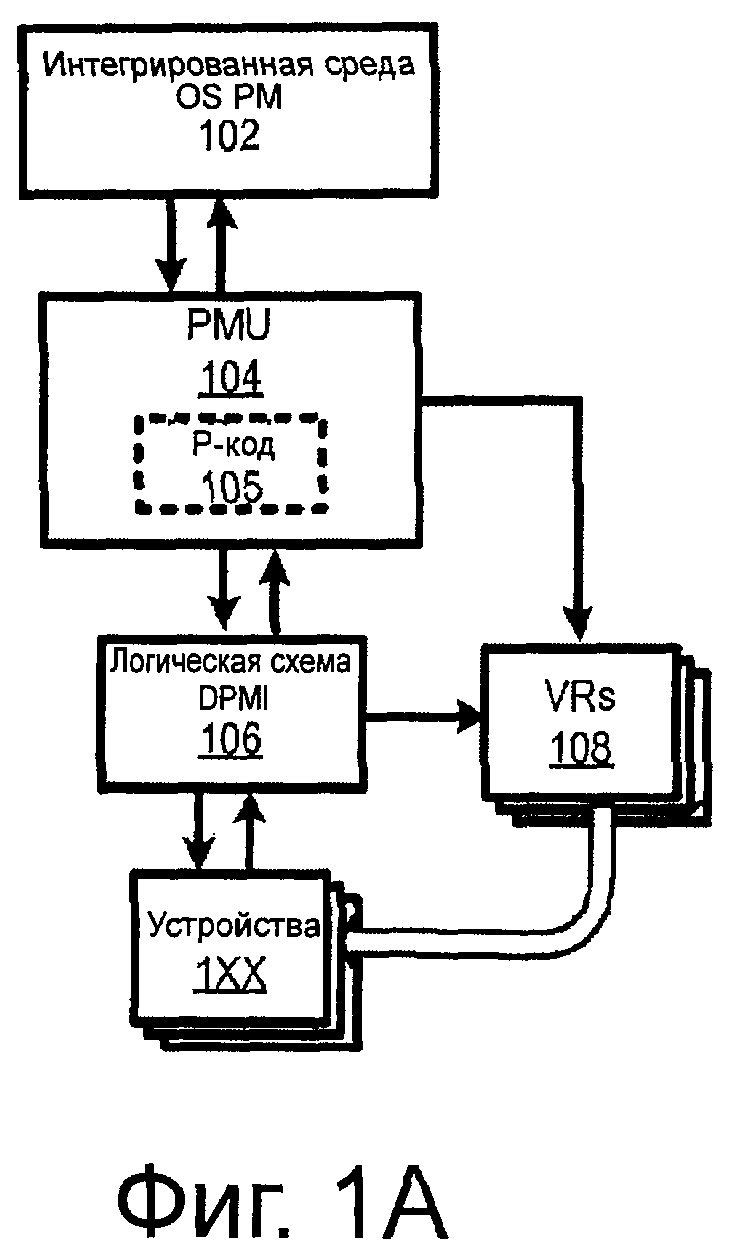
1. Устройство для управления электропитанием в вычислительной системе, содержащее:
одно или более ядер процессора, предназначенных для выполнения операционной системы с интегрированной средой управления электропитанием;
модуль управления электропитанием (PMU);
прямой интерфейс управления электропитанием, соединенный с PMU для обмена сообщениями о состоянии электропитания между PMU и устройствами, PMU предназначен для управления количеством электроэнергии, подаваемой в устройства.
2. Устройство по п.1, в котором прямой интерфейс управления электропитанием содержит логическую схему для обработки сообщений запроса электропитания от устройств.
3. Устройство по п.2, в котором запросы электропитания включают в себя запросы на уменьшение электропитания.
4. Устройство по п.2, содержащее внутреннюю шину для соединения с возможностью обмена данными прямого интерфейса управления электропитанием с устройствами.
5. Устройство по п.1, в котором PMU может вырабатывать изменения состояния электропитания за пределами интегрированной среды управления электропитанием ОС.
6. Устройство по п.1, в котором устройства содержат внутренние устройства на микросхеме, содержащей PMU.
7. Устройство по п.6, в котором устройства содержат внешние устройства, соединенные с PMU через интерфейс ввода-вывода.
8. Устройство по п.1, содержащее внутренние регуляторы напряжения в микросхеме, содержащей одно или больше ядер процессора.
9. Устройство по п.8, в котором каждое устройство имеет ассоциированный один или больше внутренних регуляторов напряжения.
10. Вычислительная платформа, содержащая:
одно или более ядер процессора, предназначенных для выполнения операционной системы с интегрированной средой управления электропитанием для выработки изменений состояния электропитания;
модуль управления электропитанием (PMU);
прямой интерфейс управления электропитанием, соединенный с PMU для обмена сообщениями о состоянии электропитания между PMU и устройствами, PMU предназначен для управления количеством электроэнергии, подаваемой в устройства.
11. Вычислительная платформа по п.10, в которой прямой интерфейс управления электропитанием содержит логическую схему для обработки сообщений запроса электропитания от устройств.
12. Вычислительная платформа по п.11, в которой запросы электропитания включают в себя запросы на уменьшение электропитания.
13. Вычислительная платформа по п.11, содержащая внутреннюю шину для соединения с возможностью обмена данными прямого интерфейса управления электропитанием с устройствами.
14. Вычислительная платформа по п.10, в которой PMU может вырабатывать изменения состояния электропитания за пределами интегрированной среды управления электропитанием ОС.
15. Вычислительная платформа по п.10, в которой устройства содержат внутренние устройства на микросхеме, содержащей PMU.
16. Вычислительная платформа по п.15, в которой устройства содержат внешние устройства, соединенные с PMU через интерфейс ввода-вывода.
17. Вычислительная платформа по п.10, содержащая внутренние регуляторы напряжения в микросхеме, содержащей одно или больше ядер процессора.
18. Вычислительная платформа по п.17, в которой каждое устройство имеет ассоциированный один или больше внутренних регуляторов напряжения.
19. Вычислительная платформа по п.10, в которой одно или больше ядер обработки, PMU и прямой интерфейс управления электропитанием представляют собой часть системы на микросхеме.
20. Устройство для управления электропитанием в вычислительной системе, содержащее:
процессор, предназначенный для выполнения операционной системы с интегрированной средой управления электропитанием для выработки изменений состояния электропитания в процессор и в устройства, соединенные с процессором;
модуль управления электропитанием (PMU), предназначенный для управления электропитанием, предоставляемым в устройства; и
интерфейс управления электропитанием, соединенный с PMU и устройствами для обработки запросов электропитания от устройств.
21. Устройство по п.20, содержащее множество внутренних регуляторов напряжения для предоставления электропитания для устройств.
22. Устройство по п.20, в котором PMU содержит политики управления электропитанием для управления мощностью, предоставляемой в устройства.
23. Устройство по п.22, в котором PMU может изменять состояния электропитания устройства, не проходя через интегрированную среду управления операционной системы.
| US 5640573 A, 17.01.1997 | |||
| US 5752046 A, 12.05.1998 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОРАБЕЛЬНОГО ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕГО КОМПЛЕКСА | 2004 |
|
RU2267849C1 |

