Изобретение относится к радиолокационной технике для определения местоположения объектов в воздушном пространстве и может быть использовано в качестве автономного радиолокационного средства для автоматического предупреждения столкновений беспилотного летательного аппарата (ЛА) с воздушными препятствиями, находящимися в интервале высот, выделяемых в соответствии с нормами эшелонирования. Препятствиями могут быть самолеты, вертолеты (включая беспилотные), а также вышки, опоры линий электропередач, вихревые следы и т.п.
В настоящее время интенсивность воздушного движения возрастает с 5% до 10% в год. В связи с увеличением количества ЛА уменьшаются интервалы высот между эшелонами (в вертикальной плоскости). Ситуация настолько сложна, что прогнозируемое увеличение к 2015 году в 2,5-3 раза объема воздушных перевозок самолетами гражданской авиации при снижении аварийности воздушного транспорта в ~3 раза не может быть выполнено, если не будут приняты дополнительные меры, особенно при возрастании количества беспилотных ЛА, а также необходимости предупреждения столкновений с «вихревыми следами». Уже в настоящее время ситуация в Европе при прогнозируемом удвоении объема воздушного движения при сокращении минимума вертикального эшелонирования приводит к потокам ЛА, стоящих в очереди в ожидании разрешения на взлет. Поэтому задача радиолокационного автономного обнаружения объектов в допустимом интервале высот между эшелонами, в том числе автоматического обнаружения приобретает первостепенное значение для защиты ЛА в том числе беспилотных от столкновений с объектами, находящимися в воздухе. Ситуация усложняется в связи с увеличением количества беспилотных ЛА, а также увеличения опасности столкновений с «вихревыми» следами в районе взлета и посадки ЛА. Интенсивность и размеры «вихревых следов» возрастает при полетах самолетов большой массы и габаритов. Например, обычный самолет ТУ-154 или Boeing 737 оставляет за собой опасную зону длиной в ~11 км. В то время как аэробус А 380 имеет длину спутного следа вдвое больше. Это значит, что после взлета такого самолета в попутном направлении не сможет взлететь ни один самолет в течение 2х минут. Для обнаружения вихревых следов необходимо установить на все самолеты дополнительное оборудование, например в виде бортового радиолокатора предупреждения столкновений с опасными воздушными препятствиями.
Следует отметить, что в настоящее время, существующее бортовое оборудование не позволяет осуществлять автономный автоматический контроль предупреждения столкновений с воздушными препятствиями, в том числе автоматический контроль беспилотных ЛА.
Известные способы и устройства определения опасного сближения для предупреждения столкновений в вертикальной плоскости основаны на измерении высоты полета конфликтующих воздушных объектов и последующем обмене данными о высоте полета каждого объекта. Отсутствие данных о высоте полета любого из конфликтующих объектов приводит к невозможности решения задачи предупреждения столкновений в вертикальной плоскости в пределах выделенного интервала высот полета.
Известные способы не являются автономными и не обеспечивают возможности автоматического предупреждения столкновений с воздушными объектами. В настоящее время на практике тяжелой и средней (по тоннажу) авиации широко используется международная «Система предупреждения столкновений в воздухе типа «TCAS», которой пользуется почти вся мировая авиация для предупреждения столкновений в воздухе. Эта система имеет большую стоимость, значительные массогабаритные характеристики, а также требует оборудования всех ЛА высотомерами и активными ответчиками, т.е. является не автономной. Эта система не обеспечивает возможность предупреждения столкновений беспилотных Л А, а также обнаружения препятствий типа «вихревой» след.
В качестве прототипа выбираем известный «Радиолокационный способ предупреждения столкновений ЛА с препятствиями в вертикальной плоскости и устройство для его осуществления». (Заявитель ОАО «НПП «Конверсия» (RU). Авторы Ещенко С.Д., Сокуренко А.С., Шестун А.Н., патент №2428713, МПК G01S 13/93), как наиболее близкие по назначению и технической сущности. В числе основных недостатков известного радиолокационного способа и устройства предупреждения столкновений ЛА с препятствиями, выбранного за прототип, следует отметить следующие:
1. Отсутствие возможности предупреждения столкновений в вертикальной плоскости беспилотных ЛА.
2. Дополнительная загрузка пилота при решении задач предупреждения столкновений в вертикальной плоскости.
Целью предлагаемого технического решения является возможность применения способа и устройства для беспилотных ЛА и, таким образом, повышение безопасности их полета путем радиолокационного, автономного, автоматического контроля полета в вертикальной плоскости в выделенном (допустимом) интервале высот полета между эшелонами и предупреждения столкновений с воздушными объектами.
Кроме того режим автомагического предупреждения столкновений ЛА с препятствиями в воздухе обеспечивает снижение загрузки пилота в пилотируемых ЛА.
Еще одной целью является точный выбор наиболее опасного объекта.
Техническим результатом заявленного способа является формирование сигнала изменения траектории полета, поступающего на автопилот.
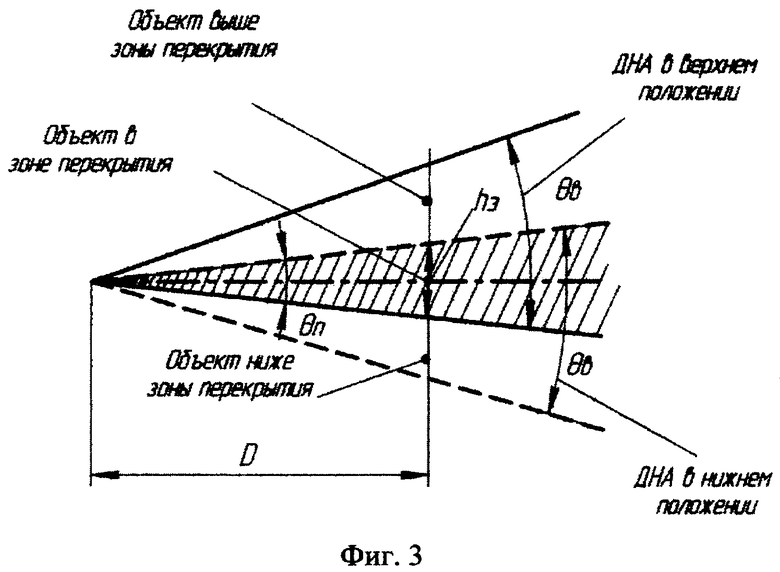
Поставленная цель достигается тем, что в способе предупреждения столкновений беспилотного ЛА с препятствиями в вертикальной плоскости в котором при радиолокационном обзоре воздушного пространства в горизонтальной плоскости осуществляются обнаружение, измерение дальности до воздушного объекта, представляющего опасность полету, захват и автосопровождение объекта по дальности, где, по измеренному значению дальности и заданному значению высотного интервала между эшелонами, определяют значение зоны перекрытия диаграммы направленности антенны (ДНА) в вертикальной плоскости в соответствии с выражением:

где θn - зона перекрытия ДНА в вертикальной плоскости;
hэ - высотный интервал между эшелонами;
D - дальность
и рассчитывают углы наклона антенны, в пределах которых обеспечивается зона перекрытия:
где Δα - углы наклона антенны, обеспечивающие зону перекрытия;
θВ - ширина ДНА в вертикальной плоскости, осуществляется сканирование антенны в вертикальной плоскости относительно стабилизированного положения в пространстве в пределах рассчитанных углов наклона, с помощью анализатора положения объекта определяют положение объекта в вертикальной плоскости, дополнительно предварительно устанавливают значение максимальной дальности до воздушного объекта, в пределах этой дальности автоматически обнаруживают воздушный объект, и, если он находится в зоне перекрытия, осуществляют его автосопровождение, при достижении предварительно установленного значения дальности опасного сближения формируют сигнал изменения траектории полета, который подают на автопилот; если объект в процессе автосопровождения выйдет из зоны перекрытия, процесс автосопровождения и сканирования в вертикальной плоскости автоматически прекращают и продолжают обзор воздушного пространства в горизонтальной плоскости, при котором автоматически выбирают другой объект.
Целесообразно, в способе предупреждения столкновений летательного аппарата с препятствиями в вертикальной плоскости дополнительно измерять скорость сближения с каждым из обнаруженных объектов в пределах заданного диапазона дальности, что позволит более точно выбрать объект, представляющий наибольшую опасность столкновения.
Бортовая радиолокационная система, осуществляющая способ по п.1 содержащая антенну, соединенную с приемопередатчиком, выход которого соединен с первым входом анализатора положения объекта и первым входом радиодальномера, выход соединен со вторым входом анализатора положения объекта и первым входом радиодальномера, выход его соединен со вторым входом анализатора положения объекта и входом вычислителя зоны перекрытия ДНА, выход которого соединен со входом вычислителя угла наклона антенны, выход последнего соединен с третьим входом анализатора положения объекта и первым входом устройства наклона и угловой стабилизации, механически связанного с антенной, второй вход которого соединен с датчиком гиростабилизации по тангажу, в нее дополнительно введен формирователь сигнала изменения траектории полета, выход которого соединен с автопилотом, первый его вход соединен с формирователем предварительно установленного сигнала дальности опасного сближения, второй вход соединен с выходом анализатора положения объекта, выход анализатора положения объекта также соединен со вторым входом радиодальномера, а третий вход соединен с выходом радиодальномера, третий вход которого соединен с формирователем предварительно установленного сигнала максимальной дальности.
Введение указанных признаков способа и устройства для его осуществления обеспечивает возможность автономно и автоматически контролировать опасное сближение беспилотного ЛА с воздушными объектами в вертикальной плоскости, вовремя совершать маневр, предотвращая столкновение. Таким образом предложенное техническое решение повышает безопасность полетов беспилотных ЛА.
При использовании описанных способа и устройства в пилотируемом ЛА обеспечивают снижение загрузки пилота.
Из известного уровня техники не выявлены решения, имеющие признаки, совпадающие с отличительными признаками предлагаемых технических решений. Поэтому можно считать, что предложенные технические решения соответствуют условию новизны.
Предлагаемый способ характеризуется тем, что как и в прототипе при радиолокационном обзоре воздушного пространства в горизонтальной плоскости осуществляется обнаружение, измерение дальности до воздушного объекта, представляющего опасность полету, захват и автосопровождение объекта по дальности, где, по измеренному значению дальности и заданному значению высотного интервала между эшелонами, определяется значение зоны перекрытия ДНА в вертикальной плоскости в соответствии с выражением:

где θn - зона перекрытия ДНА в вертикальной плоскости;
hэ - высотный интервал между эшелонами;
D - дальность
и рассчитываются углы наклона антенны, в пределах которых обеспечивается зона перекрытия:
где Δα - углы наклона антенны, обеспечивающие зону перекрытия;
θВ - ширина ДНА в вертикальной плоскости,
осуществляется сканирование антенны в вертикальной плоскости относительно стабилизированного положения в пространстве в пределах рассчитанных углов наклона, с помощью анализатора положения объекта определяют положение объекта в вертикальной плоскости.
В отличии от прототипа в предлагаемом способе предварительно устанавливают значение максимальной дальности до воздушного объекта, в пределах этой дальности автоматически обнаруживают воздушный объект, и, если он находится в зоне перекрытия, осуществляют его автосопровождение, при достижении предварительно установленного значения дальности опасного сближения формируют сигнал изменения траектории полета, который подают на автопилот, если объект в процессе автосопровождения выйдет из зоны перекрытия, процесс автосопровождения и сканирования в вертикальной плоскости автоматически прекращают и продолжают обзор воздушного пространства в горизонтальной плоскости, при котором автоматически выбирают другой объект.
Автоматическое обнаружение объекта в зоне перекрытия в пределах предварительно установленной максимальной дальности делает возможным использование предлагаемого способа и устройства в беспилотных ЛА.
При достижении предварительно установленного значения дальности опасного сближения формируют сигнал изменения траектории полета, который поступает на автопилот, то есть предупреждение столкновения с препятствием происходит без участия пилота.
Указанные признаки - автоматическое обнаружение объекта в зоне перекрытия в пределах предварительно установленной максимальной дальности и формирования сигнала изменения траектории полета при достижении предварительно установленного значения дальности опасного сближения, автосопровождение, автоматическое прекращение автосопровождения и сканирования в вертикальной плоскости, продолжение обзора в горизонтальной плоскости - является новым, что приводит к качественно новому эффекту - возможности применения способа и устройства в беспилотных ЛА.
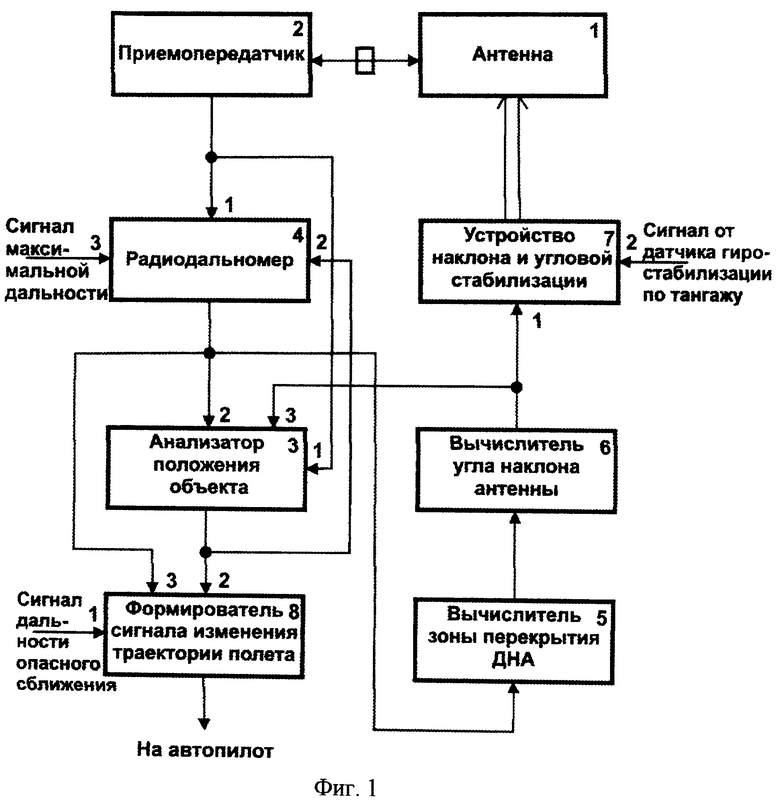
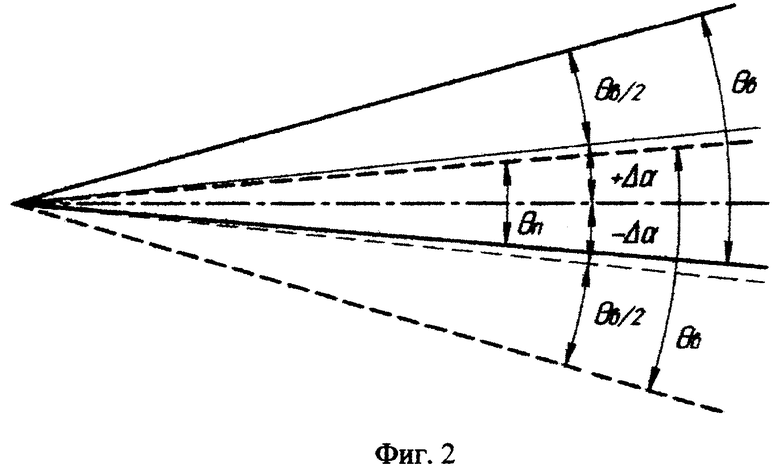
Сущность изобретения поясняется чертежами, где представлены: на фиг.1 - структурная схема предлагаемой радиолокационной системы; на фиг.2 - углы наклона антенны, обеспечивающие зону перекрытия; на фиг.3 - положения ДНА в вертикальной плоскости обеспечивающие зону перекрытия и расположения объекта относительно нее.
На фиг.1 представлен пример выполнения радиолокационной системы, реализующий способ предотвращения столкновений;
Система содержит антенну 1, соединенную с приемопередатчиком 2, выход которого соединен с первым входом анализатора положения объекта 3 и первым входом радиодальномера 4, выход которого соединен со вторым входом анализатора положения объекта 3 и входом вычислителя зоны перекрытия ДНА 5, выход которого соединен со входом вычислителя угла наклона антенны 6, выход последнего соединен с третьим входом анализатора положения объекта 3 и первым входом устройства наклона и угловой стабилизации 7, механически связанного с антенной 1, второй вход которого соединен с датчиком гиростабилизации по тангажу.
В отличии от прототипа в нее дополнительно введен формирователь сигнала изменения траектории полета 8, выход которого соединен с автопилотом, первый его вход соединен с формирователем предварительно установленного сигнала дальности опасного сближения, второй вход соединен с выходом анализатора положения объекта, выход анализатора положения объекта также соединен со вторым входом радиодальномера, а третий вход соединен с выходом радиодальномера, третий вход которого соединен с формирователем предварительно установленного сигнала максимальной дальности.
Формирователь сигнала изменения траектории полета 8 может состоять из схемы сравнения, выполненной например на микросхемах типа 1533СП1 и двух последовательно соединенных логических элементов ИЛИ типа 1533ЛЛ1 и элемента И типа 1533ЛИ1. Формирователь выдает поступающий на автопилот сигнал изменения траектории полета при условии, когда сигнал дальности будет равен или меньше сигнала дальности опасного сближения и при наличии сигнала нахождения объекта в зоне перекрытия.
Работа предлагаемой системы, осуществляющей способ выполняется следующим способом. При работе бортовой радиолокационной системы антенна 1, стабилизированная в пространстве, осуществляет сканирование воздушного пространства в горизонтальной плоскости. С выхода приемопередатчика 2 отраженный видеосигнал поступает на первый вход радиодальномера 4, на третий вход которого поступает предварительно установленный сигнал максимальной дальности. При появлении в зоне обзора на максимальной дальности воздушного объекта, с помощью радиодальномера 4 осуществляется измерение дальности до объекта, захват и автоматическое сопровождение объекта по дальности. При этом останавливается сканирование антенны в горизонтальной плоскости и осуществляется сканирование в вертикальной плоскости в пределах углов ±α, обеспечивающих необходимую зону перекрытия θn, которое рассчитываются следующим образом. С выхода радиодальномера 4 сигнал дальности до объекта D поступает на вход вычислителя зоны перекрытия ДНА 5, анализатор положения объекта 3 и формирователь сигнала изменения траектории полета 8. В вычислителе зоны перекрытия ДНА 5 определяется значение сигнала, определяющего ширину зоны перекрытия ДНА в вертикальной плоскости θn на основании данных о дальности до объекта D и заданному значению интервала высот между эшелонами hэ.
С выхода вычислителя зоны перекрытия ДНА 5 сигнал, соответствующий ширине зоны перекрытия ДНА θn поступает на вычислитель угла наклона антенны 6, который вычисляет значение сигнала, пропорционального диапазону углов наклона антенны Δα вверх и вниз (фиг.2), в пределах которых обеспечивается необходимая зона перекрытия (фиг.3). Этот сигнал поступает на вход устройства наклона и угловой стабилизации 7, который обеспечивает качание ДНА в вертикальной плоскости относительно стабилизированного положения в пространстве из верхнего положения в нижнее и обратно, в диапазоне углов Δα, обеспечивающих необходимую зону перекрытия. При этом стабилизация антенны по тангажу осуществляется суммированием сигнала управления по наклону с сигналом угла тангажа, поступающего от датчика гиростабилизации по тангажу.
Анализатор положения объекта 3, анализируя поступающий на него видеосигнал с выхода приемопередатчика 2 определяет наличие или отсутствие отраженного от объекта сигнала в верхнем и нижнем положении ДНА в пределах диапазона углов наклона Δα на дальности D. Если объект находится в зоне перекрытия, то он представляет опасность полету, при этом на выходе стабилизатора положения объекта 3 формируется сигнал, который поступает на второй вход радиодальномера 4 и обеспечивает дальнейшее автосопровождение опасного объекта. Если объект не находится в зоне перекрытия или в процессе автосопровождения вышел из зоны перекрытия, то он не представляет опасности для полета, по сигналу с выхода анализатора положения объекта 3 автосопровождение объекта и сканирование антенны в вертикальной плоскости прекращается и начинается сканирование в горизонтальной плоскости, пока не будет обнаружен новый воздушный объект, опасность столкновения с которым определяется аналогично.
Сигнал дальности с выхода радиодальномера 4, сигнал определяющий наличие объекта в зоне перекрытия с выхода анализатора положения объекта 3 и предварительно установленный сигнал дальности и опасного сближения поступают на входы 3, 2, 1 формирователя сигнала изменения траектории полета 8, который может состоять из схемы сравнения на выходы, которой поступают сигнал дальности опасного сближения. При сближении объекта сигнал дальности будет уменьшаться и когда его величина станет равной, а затем и меньше предварительно установленного сигнала дальности опасного сближения на выходе схемы сравнения появляется сигнал изменения траектории полета, который поступает на один из входов логического элемента И, на второй вход которого подается сигнал нахождения объекта в зоне перекрытия, выхода анализатора положения объекта 3. При одновременном нахождении объекта в зоне перекрытия и наличии сигнала опасного сближения на выходе схемы сравнения, на выходе логического элемента И формирователя сигнала изменения траектории полета 8 появится сигнал изменения траектории полета, который поступает на автопилот.
Реализация автономного автоматического устройства предупреждения столкновений позволяет повысить безопасность полета беспилотного ЛА за счет контроля возможного столкновения с воздушными объектами в заданном интервале высот между эшелонами.
Использование заявленного способа в пилотируемых ЛА позволяет снизить загрузку пилота.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) С ПРЕПЯТСТВИЯМИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2428713C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СЛУЧАЙНОГО СТОЛКНОВЕНИЯ САМОЛЕТОВ С ГОРНОЙ МЕСТНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236695C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ | 1999 |
|
RU2150752C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| Способ предупреждения столкновений воздушных судов при полетах в зонах пониженной плотности воздушного движения и отсутствии диспетчерской поддержки | 2016 |
|
RU2609152C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| Модуль навигационной коммуникации для летательных аппаратов | 2024 |
|
RU2832846C1 |
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ МАНЕВРЕННЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2818981C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
Изобретение может быть использовано для предупреждения столкновений ЛА с воздушными препятствиями, находящимися в интервале высот выделенного в соответствии с нормами эшелонирования. Достигаемый технический результат - повышение безопасности полета путем обеспечения автономного автоматического контроля полета и предупреждения столкновений с объектами в вертикальной плоскости в выделенном интервале высот полета между эшелонами. Указанный результат достигается за счет того, что по измеренному значению дальности и заданному значению высотного интервала между эшелонами определяют значение зоны перекрытия диаграммы направленности антенны в вертикальной плоскости, рассчитывают углы наклона антенны в пределах которых обеспечивается зона перекрытия. При сканировании антенны в вертикальной плоскости относительно стабилизированного положения в пространстве в пределах рассчитанных углов наклона определяют положение объекта в вертикальной плоскости относительно заданного высотного интервала между эшелонами в зоне перекрытия. При нахождении опасного объекта в зоне перекрытия и при достижении предварительно установленного значения дальности опасного сближения формируют сигнал изменения траектории полета, который подают на автопилот. 2 н. и 1 з.п. ф-лы, 3 ил.
1. Радиолокационный автономный способ предупреждения столкновений летательного аппарата с препятствиями в вертикальной плоскости, в котором при радиолокационном обзоре воздушного пространства в горизонтальной плоскости осуществляют обнаружение, измерение дальности до воздушного объекта, представляющего опасность полету, захват и автосопровождение объекта по дальности, где, по измеренному значению дальности и заданному значению высотного интервала между эшелонами, определяют значение зоны перекрытия диаграммы направленности антенны в вертикальной плоскости в соответствии с выражением:
где θn - зона перекрытия диаграммы направленности антенны в вертикальной плоскости;
hэ - высотный интервал между эшелонами;
D - дальность,
и рассчитывают углы наклона антенны, в пределах которых обеспечивается зона перекрытия:
где Δα - углы наклона антенны, обеспечивающие зону перекрытия;
θВ - ширина диаграммы направленности антенны в вертикальной плоскости,
осуществляют сканирование антенны в вертикальной плоскости относительно стабилизированного положения в пространстве в пределах рассчитанных углов наклона, с помощью анализатора положения объекта определяют положение объекта в вертикальной плоскости, отличающийся тем, что предварительно устанавливают значение максимальной дальности до воздушного объекта, в пределах этой дальности автоматически обнаруживают воздушный объект и, если он находится в зоне перекрытия, осуществляют его автосопровождение, при достижении предварительно установленного значения дальности опасного сближения формируют сигнал изменения траектории полета, который подают на автопилот, если объект в процессе автосопровождения выйдет из зоны перекрытия, процесс автосопровождения и сканирования в вертикальной плоскости автоматически прекращают и продолжают обзор воздушного пространства в горизонтальной плоскости, при котором автоматически выбирают другой объект.
2. Радиолокационный способ предупреждения столкновений летательного аппарата с препятствиями в вертикальной плоскости по п.1, отличающийся тем, что в пределах заданного диапазона дальности измеряют скорость сближения с каждым из обнаруженных объектов.
3. Бортовая радиолокационная система по п.1, содержащая антенну, соединенную с приемопередатчиком, выход которого соединен с первым входом анализатора положения объекта и первым входом радиодальномера, выход его соединен со вторым входом анализатора положения объекта и входом вычислителя зоны перекрытия диаграммы направленности антенны, выход которого соединен со входом вычислителя угла наклона антенны, выход последнего соединен с третьим входом анализатора положения объекта и первым входом устройства наклона и угловой стабилизации, механически связанного с антенной, второй вход которого соединен с датчиком гиростабилизации по тангажу, отличающаяся тем, что в нее дополнительно введен формирователь сигнала изменения траектории полета, выход которого соединен с автопилотом, первый его вход соединен с формирователем предварительно установленного сигнала дальности опасного сближения, второй вход соединен с выходом анализатора положения объекта, выход анализатора положения объекта также соединен со вторым входом радиодальномера, а третий вход соединен с выходом радиодальномера, третий вход которого соединен с формирователем предварительно установленного сигнала максимальной дальности.
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) С ПРЕПЯТСТВИЯМИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2428713C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| RU 2009103471 A, 10.08.2010 | |||
| WO 2004084152 C1, 28.10.2004 | |||
| US 6604044 B1, 05.08.2003 | |||
| РАЗДЕЛИТЕЛЬНОЕ ПОКРЫТИЕ ДЛЯ МОДЕЛЬНОЙ ОСНАСТКИ | 0 |
|
SU257702A1 |
| US 5922031 A, 13.07.1999. | |||

