Изобретение относится к транспортировочному устройству для заготовок, в частности заготовок из листового металла, имеющему признаки ограничительной части независимого пункта формулы изобретения.
Такое транспортировочное устройство для заготовок из листового металла известно из патента DE 20216013 U1. Оно выполнено в виде прессовой системы передачи, с помощью которой заготовки из листового металла перемещают между прессами для листовых заготовок автоматической линии прессов. Транспортировочное устройство имеет многоосный промышленный робот с захватным рабочим органом. Захватный рабочий орган установлен на конце кронштейна, прифланцованного к руке-манипулятору робота без возможности поворота и может при необходимости поворачиваться с помощью толкающей штанги вокруг вертикальной оси на конце кронштейна. Поворачивающаяся рука робота может входить в пресс и оттуда принимать или туда отдавать листовые заготовки, причем рука-манипулятор робота может оставаться за пределами пресса. При перемещении заготовок между прессами заготовку можно поворачивать на конце кронштейна. При перемещении заготовок робот совершает возвратно-поступательные движения и горизонтальные поворотные движения и перемещает заготовку по криволинейной траектории.
Из практики известны и другие прессовые передающие системы, имеющие в свободном пространстве между соседствующими между собой прессами устройство перемещения, расположенное над плоскостью перемещения заготовок. Оно состоит из тележки, совершающей линейное движение и движение поперек автоматической линии прессов, с подъемной колонной, на конце которой установлены телескопические ползуны, состоящие из трех частей и выдвигающиеся с двух сторон и имеющие на последней части передвижную транспортную тележку с поворотным механизмом для приспособления для крепления захватного рабочего органа. С помощью подъемной колонны этой тележки телескопические ползуны можно поднимать и опускать. Кинематические связи этой передающей системы прессов ограничены, что становится причиной значительной стоимости конструкции телескопических салазок. Она необходима, с одной стороны, для достижения большой выносной длины для вхождения в двусторонние прессы, а, с другой стороны, для образования небольшой ширины телескопических салазок в сходящейся средней точке для беспрепятственного размещения в свободном пространстве между прессами.
Поэтому задачей предложенного изобретения является создание улучшенной техники транспортировки заготовок.
Изобретение решает эту задачу с помощью признаков независимого пункта формулы изобретения.
Заявленная техника транспортировки выгодным образом имеет высокую подвижность и гибкость. Транспортировочное устройство может иметь, например, восемь осей и более, которыми можно управлять по отдельности. Благодаря этому можно добиться очень гибких кинематических связей и легкой приспособляемости к различным устройствам для обработки и к их постановочным требованиям, в частности к прессам автоматической линии. Транспортировочное устройство можно применять для самых разных устройств обработки. Его можно также запросто приспособить к изменяющимся расстояниям между соседними устройствами для обработки. Для этого в большинстве случаев достаточно перепрограммировать робот. Легко адаптируемое транспортировочное устройство может поднимать и опускать заготовки и также перемещать по любой и, в частности, в значительной степени прямой линии между устройствами для обработки. Эта быстрая и эффективная кинематика благоприятно действует на достижение высокой скорости транспортировки и соответственно быстрого ритма обработки, в частности ритма сжимания. В иных случаях транспортировочное устройство может переориентировать перемещение заготовок, а также при необходимости перемещать их по искривленной траектории.
Кроме того, заявленное транспортировочное устройство выгодно с точки зрения конструктивных размеров. Оно может иметь небольшую высоту, что, прежде всего, благоприятно сказывается на концевых областях, которые входят в устройство для обработки, в частности пресс. Для такого вхождения необходимую ширину раскрытия устройства для обработки можно сделать небольшой, что также может благоприятно сказываться на ускорении работы механизма и рабочего цикла в целом.
Благодаря многократным поворотным движениям вокруг осей робота и поворотному механизму заготовку можно как угодно поворачивать и отклонять. Это благоприятно сказывается на возможности быстрого и надежного манипулирования сложными по форме заготовками с разнесенными между собой областями. В частности, такие заготовки можно поворачивать над краями внутри пресса при выемке из пресса и введении в пресс и тем самым перемещать при явно меньшей ширине раскрытия краев.
Подающий механизм и поворотный механизм можно задействовать для управления роботом в качестве дополнительных осей, и ими можно управлять напрямую. Это благоприятным образом влияет на быстрое и целенаправленное движение захватного рабочего органа и зажатой заготовки.
Кроме того, транспортное устройство предлагает высокую точность позиционирования вокруг нескольких разных осей. Таким образом заготовку можно удерживать и фиксировать в заданном положении во время перемещения и при манипуляциях при ее выемке из устройства для обработки или при ее введении в устройство для обработки. В поворотном механизме весьма кстати может быть передаточное отношение, чтобы лучше подкрепить и удержать моменты реакции заготовки, причем можно снять нагрузку с поворотного привода.
Поворотную ось для движения заготовки можно установить при необходимости в желаемом месте в области передающего устройства или также на расстоянии от него в области заготовки. Положение поворотной оси на передающем устройстве и на принадлежащих ему ползунах способствует уменьшению высоты конструкции. Способность к повороту, ограниченную при определенных обстоятельствах из-за близости несущей балки, можно компенсировать с помощью вращающихся осей робота.
В общем, заявленное транспортировочное устройство предлагает высокую эффективность и экономичность в сочетании с усовершенствованными кинематическими связями.
Примеры выполнения изобретения схематично и подробно представлены на чертежах:
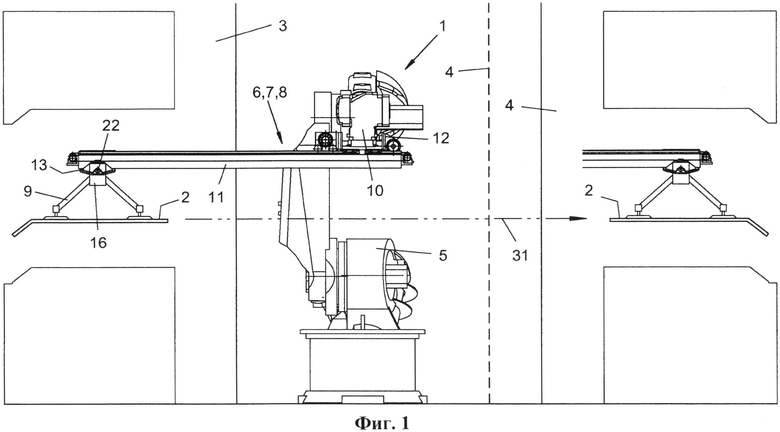
Фиг.1 схематичное изображение транспортировочного устройства для заготовок из листового металла в свободном пространстве между двумя соседними прессами.
Фиг.2 первый вариант выполнения транспортировочного устройства (вид сбоку).
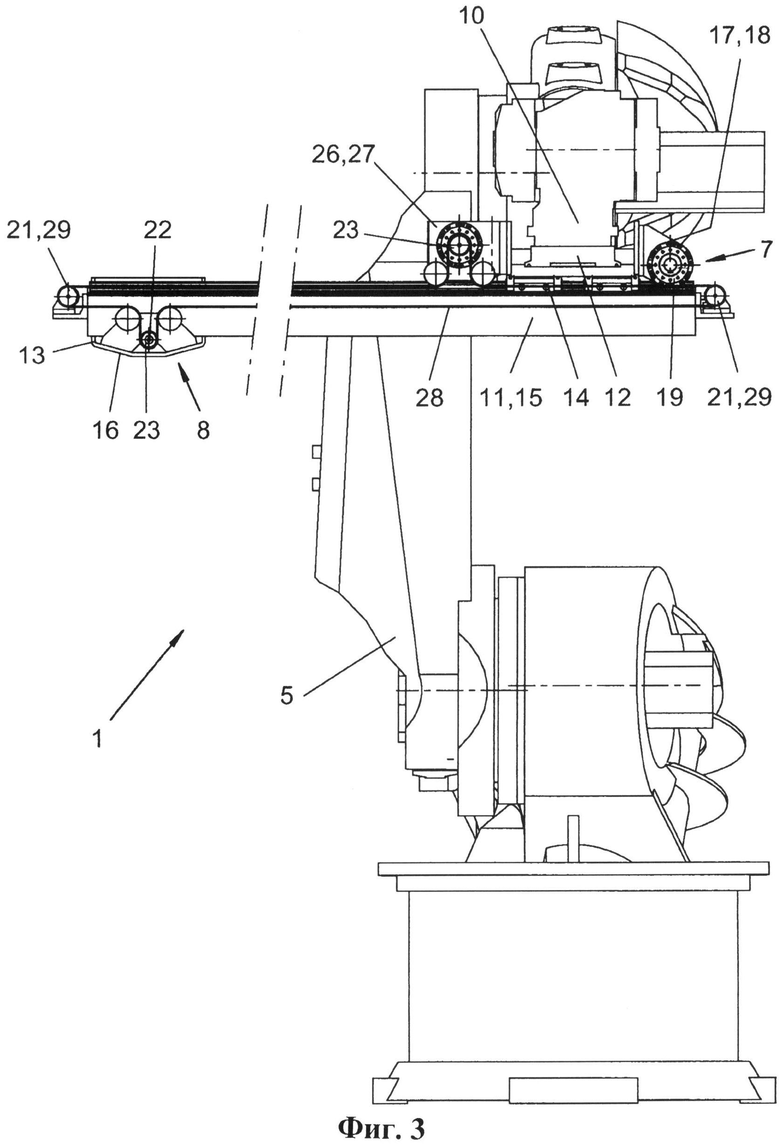
Фиг.3 второй вариант выполнения транспортировочного устройства (вид сбоку).
Фиг.4 и 5 третий вариант выполнения транспортировочного устройства (разные виды в перспективе).
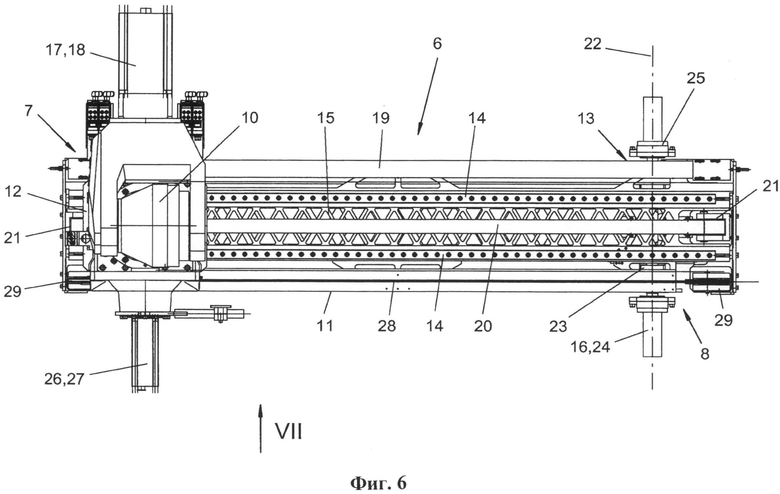
Фиг.6 вид сверху на передающее устройство третьего варианта.
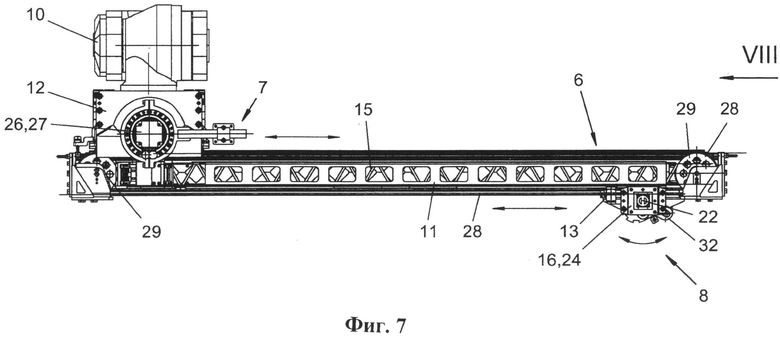
Фиг.7-9 другие виды передающего устройства фиг.6.
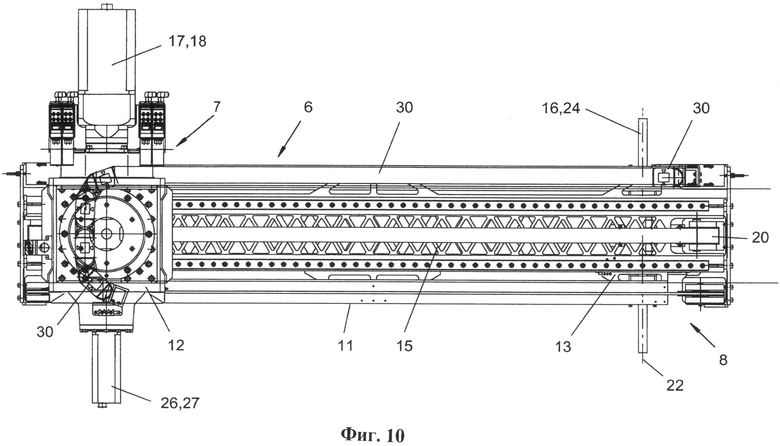
Фиг.10 схематичное изображение энергоцепи в передающем устройстве
фиг.6.
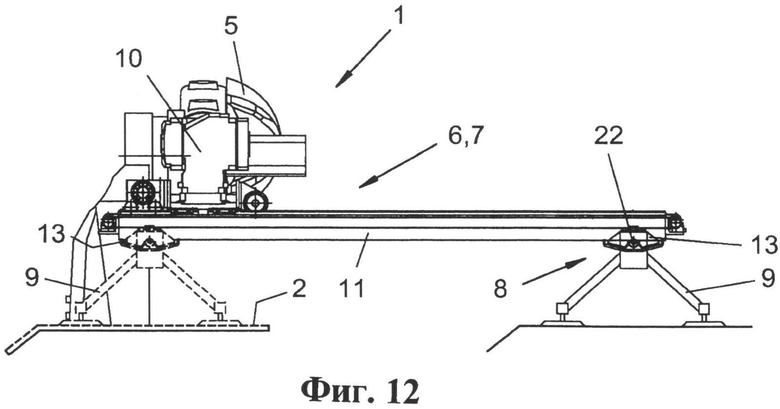
Фиг.11 и 12 разные положения движения передающего устройства.
Фиг.13 схематичное изображение варианта поворотного привода.
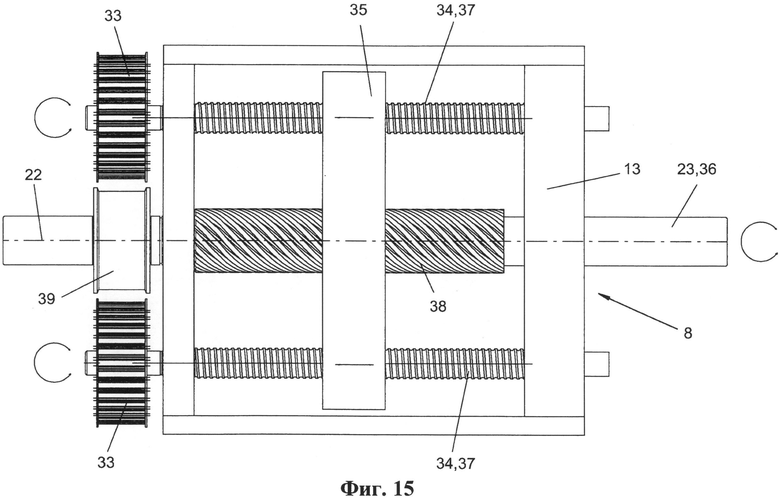
Фиг.14 вид в перспективе коробки передач поворотного привода фиг.13.
Фиг.15 вид сверху на коробку передач поворотного привода фиг.13.
Изобретение относится к транспортировочному устройству (1) для заготовок (2) и их доставке к одному или нескольким соседствующим между собой устройствам для обработки (3, 4). В частности, транспортировочное устройство (1) включает в себя прессовую систему передачи заготовок из листового металла (2) между соседними прессами (3, 4), которые могут быть при необходимости компонентами автоматической линии прессов. Изобретение относится, кроме прочего, к способу транспортировки.
На фиг.1 схематично представлено транспортировочное устройство (1), которое установлено в свободном пространстве между двумя соседствующими между собой устройствами для обработки (3, 4), в данном случае между прессами для металлического листа, и перемещает заготовки (2), в данном случае гнутые заготовки из листового металла, между прессами (3, 4) по соединительной линии (31), по существу, прямой. В отличие от представленной формы выполнения устройства для обработки (3, 4) могут иметь другой тип и конструкцию, а также другое расположение. В представленной форме выполнения заготовки (2) перемещают без остановки непосредственно от одного устройства для обработки (3) к другому устройству для обработки (4).
В отличие от представленной формы выполнения транспортировочное устройство (1) можно расположить также между устройством для обработки и складом или накопителем или т.п. хранилищем для заготовок (2), причем оно подает или увозит заготовки (2).
Для транспортировки заготовок предусмотрено транспортировочное устройство (1), имеющее, по меньшей мере, многоосный робот (5) с передающим устройством (6) и захватным рабочим органом (9). Робот (5) направляет управляемое передающее устройство (6), которое имеет подающий механизм (7) и поворотный механизм (8) для захватного рабочего органа (9).
Многоосный робот (5) может быть выполнен любым подходящим образом и может иметь три или более трех вращательных и/или линейных осей в любых их сочетаниях и количествах. В представленном и предпочтительном примере выполнения робот (5) выполнен в виде робота с шарнирно сочлененной рукой-манипулятором, который имеет шесть вращательных основных осей. Кроме того, он может иметь одну или несколько других осей перемещения, в частности линейную рабочую ось или поворотную ось на поворотном рычаге или т.п.
Робот (5) имеет, кроме прочего, многоосную руку-манипулятор (10). Она может иметь две или три оси, которые являются компонентами упомянутых основных осей робота (5). Например, две или три оси руки-манипулятора могут быть ортогональными поворотными осями и иметь при необходимости общую точку пересечения. Рука-манипулятор робота (10) может иметь на выходной стороне привода подвижный ведомый элемент, например вращающийся фланец (не представлен), который можно соединить непосредственно с передающим устройством (6) жестко или с возможностью разъединения. При этом можно также предусмотреть дистанционно управляемую промежуточную переключающую муфту, позволяющую автоматически переключать передающее устройство (6). Для этого робот (5) может выполнять, например, перекатывающееся движение в обратном направлении к пункту переключения или к накопителю для передающих устройств (6). Альтернативно, передающее устройство (6) можно оставить на роботе, причем захватный рабочий орган (9) можно заменить на задней стороне робота, используя магазин для инструментов. Кроме того, робот (5) имеет устройство управления (не показано).
Подающий механизм (7) и поворотный механизм (8) передающего устройства (6) связаны с устройством управления робота. Они могут быть выполнены в качестве дополнительных осей робота (5) и ими можно управлять непосредственно с помощью устройства управления робота. В показанном примере транспортировочное устройство (1) может иметь восемь или более восьми отдельных осей перемещения, управляемых независимо друг от друга.
Передающее устройство (6) может иметь функцию стрелы и служить для введения захватного рабочего органа (9) в открытые прессы (3, 4) и в область между верхним и нижним органами прессов (3, 4), схематично представленными на фиг.1. Рука-манипулятор робота (10) и его другие элементы могут при этом оставаться за пределами прессов (3, 4). Длину стрелы передающего устройства (6) можно согласовать с этой функцией ввода и сделать ее оптимальной. Передающее устройство (6) может быть при необходимости и длиннее.
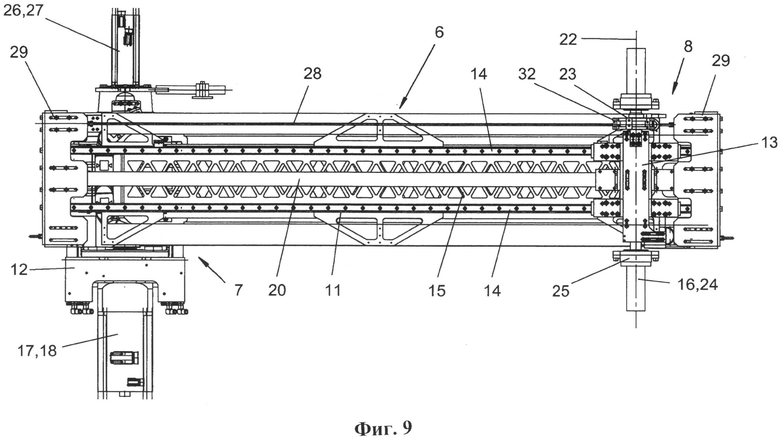
Передающее устройство (6) представлено на фиг.2 и 3 в первом и втором вариантах выполнения. На фиг.4-10 показан третий вариант выполнения передающего устройства (6). Его можно подробно видеть на фиг.6 (вид сверху), причем на фиг.7 и 8 представлены соответствующие виды сбоку и с торца согласно стрелкам VII и VIII. На фиг.9 представлен вид снизу.
Передающее устройство (6) имеет в разных вариантах каждый раз приспособление для зажима заготовки (16) для захватного рабочего органа (9), которое может совершать линейные и вращательные движения относительно руки-манипулятора робота (10) с помощью подающего механизма и поворотного механизма (7, 8). Возможности движения показаны на фиг.7 с помощью стрелок. Захватный рабочий орган (9) может быть выполнен любым подходящим образом. В показанном примере выполнения фиг.1 речь идет о захватном крючке с опорным каркасом и несколькими захватными элементами, выполненными, например, в виде присасывающего наконечника, магнитной головки или т.п.,и захватывающими заготовку (2) в заданном месте.
Захватный рабочий орган (9) может быть цельным или составным. Его можно соединить с приспособлением для зажима заготовки (16) с помощью, например, присоединения (24) в виде цапфы или трубки и расположенной там при необходимости муфты (25). Муфтой (25) можно управлять вручную. Она может иметь также привод и дистанционное управление, так, чтобы была возможность автоматической замены инструмента описанного выше типа.
Передающее устройство (6) в разных вариантах можно перемещать с помощью робота туда-сюда между устройствами для обработки (3, 4). Передающее устройство (6) может перемещаться также, в свою очередь, относительно робота (5) и, в частности, относительно его руки-манипулятора (10). При небольшом расстоянии между устройствами для обработки (3, 4) и при достаточной длине передающего устройства (6) робот (5) может при определенных условиях находиться в состоянии покоя или ограничиваться движениями подъема и при необходимости дополнительными поворотными движениями, причем совершается главное движение перемещения передающего устройства (6) вдоль соединительной линии (31).
Такая конфигурация с контуром пресса, обозначенным штриховой линией в правой половине рисунка, представлена на фиг.1. Если расстояние между устройствами для обработки (3, 4) больше, то робот (5) может выполнять дополнительное движение перемещения, например поворотное движение, происходящее, по существу, горизонтально, для дополнительного движения и перемещения передающего устройства (6) вдоль соединительной линии (31). На фиг.1 показано большее расстояние до пресса с помощью штриховой линии в правой половине рисунка.
Передающее устройство (6) имеет несущую балку (11), соединенную с рукой-манипулятором робота (10). По несущей балке (11) захватный рабочий орган (9) или приспособление для крепления рабочего органа (16) может совершать линейное или другое движение в продольном направлении и также поворотное движение относительно несущей балки (11). Как видно на фиг.1 и 7, несущая балка (11) удерживается роботом (5) в рабочем положении таким образом, что движение подачи направлено вдоль соединительной линии (31), по существу, горизонтально. Поворотная ось (22) поворотного движения приспособления для крепления рабочего органа (16) может быть направлена поперек движению подачи или поперек продольной оси передающего устройства (6) и проходить параллельно соседней главной плоскости или направляющей плоскости рабочего органа несущей балки (11), в частности параллельно ее нижней стороне.
Поворотная ось (22), в частности, при работе транспортировочного устройства (1) может занимать, по существу, горизонтальное положение. По существу, горизонтальное положение означает в обоих случаях то, что преобладающий компонент направленности находится в горизонтали, причем движение подачи и поворотная ось (22) могут быть ориентированы точно по горизонтали или соответственно по наклонной.
Несущая балка (11) может перемещаться, в свою очередь, относительно руки-манипулятора робота (10), причем она может перемещаться, в частности, вдоль соединительной линии (31). Она, как двусторонняя стрела, может отклоняться от руки-манипулятора робота (10) то налево, то направо.
Несущая балка (11) обладает большой изгибной жесткостью и может быть выполнена в целях уменьшения веса в виде полого тела. Она имеет соответственно жесткую несущую конструкцию (15), например каркасную конструкцию. Жесткая несущая конструкция (15) может быть выполнена альтернативно в виде коробчатого корпуса с отверстиями для уменьшения веса. Несущая балка (11) имеет в сечении, по существу, прямоугольную форму и может иметь прямую направленность. Движения подачи при этом прямолинейные. Альтернативно, они могут быть искривленными, причем несущая балка имеет соответственно другую форму.
Подающий механизм (7) имеет ползун (12), который можно соединить с рукой-манипулятором робота (10) и для этого предусмотреть соответствующее место соединения для сцепления с ведомым фланцем руки-манипулятора робота (10) или переключающей муфтой. Альтернативно, ползун (12) можно соединить также и с последним участком корпуса руки-манипулятора робота (10). Подающий механизм (7) имеет, кроме того, по меньшей мере, один второй ползун (13), который предусмотрен, например, для приспособления для крепления рабочего органа (16). Ползуны (12, 13) установлены на несущей балке (11) с возможностью линейного перемещения и их можно направлять по подходящим направляющим (14), например по рельсовым направляющим, в сочетании с роликами или скользящим башмаком на ползуне, при большой опорной базе и устойчивости последовательно в направлении подачи, или перемещать или продвигать. Направляющая (14) для ползуна (13) образует упомянутую выше направляющую плоскость для рабочего органа.
Ползуны (12, 13) можно установить с разных сторон несущей балки (11). В представленных примерах выполнения ползун (12) для руки-манипулятора робота (10) установлен на верхней стороне балки, а ползун (13) для приспособления для крепления рабочего органа (16) - на нижней стороне. Возможны и другие варианты, когда, например, ползуны (12, 13) и их направляющие (14) установлены под углом или прилегают напротив друг друга к боковым краям несущей балки.
Поворотная ось (22) для приспособления для крепления рабочего органа (16) и захватный рабочий орган (9) могут находиться в представленных примерах выполнения в области несущей балки (11) или в области ползуна (13). Альтернативно, при соответствующей конструкции поворотного механизма (8) она может находиться на расстоянии от несущей балки (11), например, в области заготовки (2).
Подающий механизм (7) и поворотный механизм (8) имеют регулируемые приводы (17, 26). Их можно выполнить любым подходящим образом. Привод подающего механизма (17) можно создать, например, от цилиндрической конструкции, линейного двигателя или т.п. Привод поворотного механизма (26) можно создать, например, от двигателя, насаженного на ось вращения приспособления для крепления рабочего органа (16).
В представленных примерах выполнения привод подающего механизма (17) и привод поворотного механизма (26) установлены на руке-манипуляторе робота (10) или на соответствующем ползуне (12). Это выгодно для распределения массы и обеспечения рабочими средствами. Таким образом, приводы (17, 26) можно установить неподвижно относительно несущей балки (11) и другого ползуна (13).
Подающий механизм (7) предназначен для перемещения ползунов (12, 13) и при необходимости несущей балки (11). Это, например, взаимосвязанные движения ползунов (12, 13) и движения несущей балки (11) относительно робота (5) или его руки-манипулятора (10) и подсоединенного там ползуна (12).
Ползуны (12, 13) могут быть выполнены с возможностью независимого друг от друга перемещения и приведения в действие. Ползуны (12, 13) можно также соединить между собой вращающимся соединительным устройством (20), так, чтобы они выполняли зависимые друг от друга движения.
Соединительное устройство (20) может представлять собой, например, гибкий соединительный элемент, например ремень или трос, который соединен с обоими ползунами (12, 13) и передает им свое движение. Соединительное устройство (20), расположенное, например, в середине несущей балки (11), совершает движение по замкнутому кругу с помощью поворотных роликов (21), расположенных на обоих концах несущей балки (11). Привод подающего механизма (17) воздействует на несущую балку (11) и перемещает ее линейно относительно ползуна (12), опирающегося на робот (5). Это относительное движение передается от соединительного устройства (20) на другой ползун (13), который перемещается таким образом в том же направлении, что и несущая балка (11) и при этом имеет удвоенную абсолютную скорость несущей балки (11). Соединенные ползуны (12, 13) перемещаются на несущей балке (11) в разных направлениях.
Привод подающего механизма (17) имеет в приведенном примере выполнения двигатель (18) и средство передачи (19), воздействующее на несущую балку (11). Двигатель (18) может представлять собой электромотор, в частности электрический серводвигатель, который соединен с устройством управления робота и который дает возможность совершать точные и быстрые движения автоматической установки в заданное место. Двигатель (18) может иметь дополнительную понижающую передачу.
Средство передачи (19) выполнено в первом примере выполнения фиг.2 в виде реечной передачи, причем двигатель (18) приводит в действие - напрямую или через предвключенную передачу - ведущую шестерню, которая входит в зацепление с зубчатой рейкой, проходящей вдоль несущей балки (11) и расположенной на ее верхней стороне. Второй вариант фиг.3 также может иметь такую реечную передачу или другую передачу, которая превращает вращение двигателя в поступательное движение несущей балки (11).
В третьем примере выполнения фиг.4-10 средство передачи (19) выполнено в виде ременной передачи, причем шестерня, принадлежащая двигателю (18), входит в зацепление с концом зубчатого ремня в торцевых областях несущей балки (11), в виде обхвата, напоминающего букву Й. Ременный привод (19) установлен, например, на верхней стороне и на продольном краю несущей балки (11).
Для привода поворотного механизма (26) есть разные формы выполнения. Он служит для воздействия поворотного положения или положения поворота приспособления для зажима рабочего органа (16) на ползун (13), причем это возможно в равной степени во всех положениях ползуна.
Привод поворотного механизма (26) может иметь также управляемый двигатель (27). Как и в случае с приводом подающего механизма (17), это может быть электромотор, в частности электрический серводвигатель, который также соединен с устройством управления робота и способствует быстрому и точному повороту заготовки и установке ее по месту и сохранению поворотного положения. Удерживающие силы при действии привода подающего механизма (17) и привода поворотного механизма (26) могут формироваться с помощью двигателей (18, 27). При другом размещении двигателя можно при необходимости предусмотреть тормозные устройства для поддержки.
Привод поворотного механизма (26) соединен с приспособлением для крепления рабочего органа (16) при помощи средства передачи (28). Это может быть гибкое средство передачи, например трос, или гладкий ремень, или ремень с зубьями, или т.п., который установлен на несущей балке (11) с возможностью совершения обегающего движения. Он направлен по поворотным роликам троса (29), находящимся на торцевых концах несущей балки (11). В примерах выполнения представлены разные формы.
В варианте фиг.2 и 3 средство передачи (28) выполнено в виде ременной передачи, в частности зубчатой ременной передачи. Зубчатый ремень направлен в своем бесконечном обороте по поворотным роликам (29), находящимся на торцевых сторонах несущей балки, и обегает в продольном направлении несущую балку (11). Тело вращения (23), выполненное в виде шестерни и соединенное с приводом поворотного механизма (26), находится в зацеплении в направляющей в виде 0 или другим образом с зубчатым ремнем. Зубчатый ремень направлен, кроме того, на ползуне (13) по другому телу вращения (23) и приводит его в действие. Вращение от ремня переходит в соответствующее вращение приспособления для крепления рабочего органа (16). При такой форме выполнения ось вращения (22) приспособления для крепления рабочего органа (16) и ось вращения шестерни или тела вращения (23) совпадают.
В третьем варианте фиг.4-10 средство передачи (28) выполнено в виде тросового привода. Этот тросовый привод (28) требует меньшей высоты конструкции, чем привод зубчатым ремнем в двух первых формах выполнения. Бесконечный трос здесь также направлен по двум телам вращения (23) и при этом соединен с телами вращения (23), по меньшей мере, в одном месте без возможности поворота для захватывания. При этом трос может обвивать тело вращения (23) и закреплен на корпусе тела вращения с помощью зажимов или т.п. Вращение тела вращения (23) на стороне привода преобразуется благодаря этому в соответствующее вращение на выходной стороне на ползуне (13).
В этой форме выполнения ось вращения (22) приспособления для крепления рабочего органа (16) также совпадает с осью вращения тела вращения (23) на ползуне (13). Альтернативно, оси можно разнести между собой, причем тело вращения (23) на стороне ползуна воздействует на приспособление для крепления рабочего органа (16). Передача (32) может быть образована, например, от дискового кулачка с кулисным камнем, как это представлено, например, на фиг.7 и 8.
В другом варианте, который не представлен, поворотный механизм (8) может иметь находящуюся на расстоянии ось вращения (22), находящуюся, например, в заготовке (2). В этом случае, например, средство передачи (28) может быть выполнено как привод зубчатым ремнем, который приводит в действие тело вращения (23) в виде шестерни, которое опять же находится в зацеплении с зубчатым сектором, который изогнут вокруг оси вращения (22), причем приспособление для крепления рабочего органа (16) соединено с зубчатым сектором. Зубчатый сектор может находиться в соответствующих направляющих на ползуне (13) во вращении.
Благодаря обегающему устройству средства передачи (28) возможно зацепление привода поворотного механизма (26) во всех положениях ползуна. Движение подачи несущей балки (11) с помощью привода подающего механизма (17) приводит к соответствующему движению подачи или перемещения ползуна (13) в том же направлении, так что расстояния между телами вращения (23) на левой и правой сторонах несущей балки (11) выравниваются, и движение подачи не оказывает никакого влияния на привод поворотного механизма (26).
На фиг.11 и 12 показаны разные положения передающего устройства (6) при движении. На фиг.11 ползун (12) подающего механизма (7) находится на правом конце несущей балки (11), причем другой ползун (13) с захватным рабочим органом (9) находится на другом конце несущей балки. Ползун (13) может перемещаться вместе с ползуном (12) или независимо от него вдоль несущей балки (11) и может занимать любые положения, например, показанное штриховкой другое конечное положение на правом конце несущей балки. Между тем возможны и любые другие промежуточные положения или перемещения в горизонтальной плоскости. Поворотный механизм (8) во время движений ползунов (12, 13) может оставаться в состоянии покоя или действовать.
На Фиг.12 показано перемещение несущей балки (11) и ползуна (12) относительно робота (5). При этом, например, балка (11) сдвинута или перемещена вправо из исходной позиции фиг.11, так что ползун (12) и рука-манипулятор робота (10) могут находиться на левом конце несущей балки или занимать любое промежуточное положение. Приведенный в действие ползун (13) может находиться в покое при движении несущей балки и занимать исходное положение согласно фиг.11, показанное штриховой линией на фиг.12. Движения ползуна могут накладываться друг на друга, так что ползун (13) во время перемещения несущей балки перемещается от одного конца несущей балки к другому концу или занимает любые промежуточные положения на несущей балке (11). Сравнение фиг.11 и 12 показывает, в целом, весь путь захватного рабочего органа (9), достигаемый благодаря гибким кинематическим связям передающего устройства (6).
Передающее устройство (6) может, кроме того, перемещаться любым образом в пространстве с помощью руки-манипулятора робота (10). Оно может поворачиваться, в частности, вокруг ведомой последней оси или оси руки-манипулятора робота (10). Для выполнения привода подающего механизма и привода поворотного механизма (17, 26) на ползуне (12) имеются разные возможности. В первом и втором вариантах фиг.2 и 3 оба привода (17, 26) расположены, если смотреть в продольном направлении несущей балки (11), друг за другом и с обеих сторон ползуна (12). При этом их оси вращения направлены поперек продольной оси балки и параллельно. В третьем варианте компоновка агрегатов привода вращается. В данном примере привод подающего механизма (17) и привод поворотного механизма (26), если смотреть в поперечном направлении несущей балки (11), находятся напротив друг друга и с обеих сторон ползуна (12). Их ведомые оси снова направлены поперек продольной оси несущей балки и при этом также навстречу друг другу. Они могут при необходимости находиться также на одной прямой. Во всех показанных вариантах приводы (17, 26) и их двигатели (18, 27) могут находиться примерно на одном уровне и располагаться над несущей балкой (11). Возможны также варианты.
Обеспечение захватного рабочего органа (9) рабочими средами, например током, пониженным давлением и т.п., может происходить с помощью робота (5) и его руки-манипулятора (10). При этом, например, может иметь место энергоцепь (30), представленная на фиг.10 (вид сверху), имеющая на одном конце источник питания на ползуне (12) и связанная на другом конце с поворотным приспособлением для крепления рабочего органа (16) и там при необходимости со связывающей средой. Последняя необходима в том случае, если переключающая муфта расположена на приспособлении для крепления рабочего органа (16) для автоматической замены инструмента. Источник питания на ползуне (12) также может иметь связывающую среду или может быть соединен с переключающей муфтой. Здесь подключение к среде заканчивается с обеспечением робота (5) рабочей средой.
Как видно на фиг.10, гибкая энергоцепь (30) может состоять из нескольких звеньев, в полых пространствах которых проведена одна или несколько гибких линий энергоснабжения. Энергоцепь (30) проходит внутри несущей балки (11) и при этом вдоль ее продольных краев. Поворот цепи через ширину несущей балки происходит на ползуне (12). На фиг.10 показано конечное положение - вид несущей балки (11) снизу с прямым участком цепи, находящимся на верхнем краю балки и размещенным в соответствующем приемнике на несущей балке (11). Когда несущая балка (11) перемещается влево относительно ползуна (12), прямой участок цепи разворачивается на верхнем краю несущей балки, и на нижнем краю несущей балки образуется новый прямой участок цепи в находящемся там приемнике. Упомянутые верхний и нижний края балки видны на фиг.10.
На фиг.13-15 представлен вариант поворотного механизма (8). Привод поворотного механизма (26), установленный в подходящем месте, например, на ползуне (12), приводит в движение по замкнутому кругу средство передачи (28), выполненное, например, в виде зубчатого приводного ремня и направленное описанным выше способом по поворотным роликам (29), находящимся на концах несущей балки (11). На нижнем ползуне (13) с поворотной осью (22) средство передачи (28) направлено по направляющей в форме буквы Ω с петлей, накинутой на два ведущих зубчатых колеса (33), в частности, на две шестерни, и на находящийся между ними поворотный ролик (39) для поворота. Средство передачи (28), например зубчатый приводной ремень, соединено для надежного вращения, например сцеплено с помощью контактов зубьев, с ведущими зубчатыми колесами или шестернями (33) и при обращении приводит в действие валы (34), соединенные с ведущими зубчатыми колесами или шестернями (33). Валы (34) проходят параллельно поворотной оси (22) и телу вращения (23) и установлены в опорах в ползуне (13) с возможностью вращения. Валы (34) имеют с наружной стороны винтообразную резьбу (37), в частности ходовую резьбу. Тело вращения (23) выполнено в этом примере в виде вала (36) и также установлено в подходящих опорах в ползуне (13) с возможностью вращения. Поворотный ролик (39), в свою очередь, выполнен с возможностью свободного вращения на валу (36). Вал (36) имеет снаружи резьбу (38), в частности ходовую резьбу. Валы (34, 36) представляют собой шпиндели.
Все три параллельных вала (34, 36) с их наружной резьбой контактируют с их общим поперечным соединительным корпусом (35), который также установлен в раме ползуна (13) и при необходимости скользит в раме с помощью продольной направляющей. Соединительный корпус (35) имеет ходовые гайки, например, в виде сквозных высверленных каналов для трех валов (34, 36) с внутренней резьбой, входящей в зацепление с резьбой валов (37, 38).
Обращение средства передачи (28) преобразуется в движение вращения шестерней (33) и их валов (34), которое опять же приводит к перемещению контактирующего соединительного корпуса (35) в осевом направлении в соответствии с направлением вращения валов. Это перемещение соединительного корпуса (35) в осевом направлении преобразуется при контакте с резьбой (38) в движение вращения вала (36) тела вращения (23). Шпиндели (34) приводят во вращение шпиндель (36). Действующую при этом передачу можно регулировать. Резьба (38) тела вращения (23) или шпинделя (36) имеет, например, больший шаг, чем резьба (37) шпинделей (34).
Представленный вариант поворотного механизма (8) имеет разные преимущества. Контактное напряжение, которое зубчатые колеса оказывают только на очень небольшую поверхность, может распределяться с помощью валов или шпинделей (34, 36) на значительно большую поверхность. Благодаря этому используемый материал меньше подвержен нагрузке и лучше сохраняется. Благодаря разной высоте подъема валов или шпинделей (34, 36) можно добиться очень высокого передаточного отношения. Благодаря передаточному отношению можно, с одной стороны, передавать высокий вращающий момент на ведомый вал или шпиндель (36), причем, с другой стороны, можно уменьшить воздействия, например колебания или т.п., с помощью самоторможения валов или шпинделей (34, 36) до зазора ходовой гайки в соединительном корпусе (35). Благодаря высокому передаточному отношению можно, кроме прочего, очень точно управлять движением вращения поворотного тела (23) и захватного рабочего органа (9).
В представленном примере выполнения фиг.13-15, как и в описанных выше примерах, ползуны (12, 13) соединены между собой соединительным устройством (20) (не представлено). Благодаря этому движение продвижения или перемещения ползунов (12, 13) и движение сдвига несущей балки (11) не влияет на поворотное положение ведомого тела вращения или поворотного тела (23) и приспособления для крепления рабочего органа (16).
В представленной форме выполнения заготовки (2) перемещают без их промежуточного хранения. В другом, не представленном варианте при необходимости можно установить в рабочей зоне робота (5) второй робот, который имеет свой собственный захватный рабочий орган и, при необходимости, также передающее устройство (6). В такой ситуации с несколькими роботами возможна передача заготовок, причем второй робот может вставлять или подавать заготовку (2) в повернутом положении с помощью других устройств для обработки (3, 4). Когда второй робот не нужен, его увозят по оси перемещения или с помощью выполнения аксиальных движений делают таким маленьким, что он не мешает роботу (5).
Возможны разные варианты представленных и описанных форм выполнения. Признаки разных примеров выполнения можно переставлять между собой или сочетать друг с другом.
Поворотный механизм (8) согласно фиг.13-15 с преобразованием и взаимосвязанной передачей вращений шпинделей по находящемуся в контакте и перемещающемуся по оси соединительному корпусу (35) имеет самостоятельное изобретательское значение и может применяться для любых других целей и других устройств, например только для поворотных устройств. Как вариант представленного примера, количество и расположение ведущих колес или шестерен (33) и их шпинделей (34) может меняться. Может хватить и одного единственного ведущего колеса (33) вместе со шпинделем (34). Но их может быть и три и более.
Передающее устройство (6) может иметь и другую конструкцию и состоять из нескольких частей, причем несущая балка (11) может быть выполнена, например, в виде составного телескопического ползуна. При применении робота (5) это, разумеется, не нужно, так как длина несущей балки (11) ориентирована на желаемую глубину погружения на устройствах для обработки (3, 4) и может быть соответственно короткой. Длина несущей балки (11) может быть, в частности, короче, чем расстояние между устройствами для обработки (3, 4), в частности, между их внутренними конечными положениями для установки захватного рабочего органа (9) или приспособления для крепления рабочего органа (16). Недостающую длину балки можно компенсировать за счет движения перемещения робота (5) в направлении соединительной линии (31).
Кроме того, компоненты передающего устройства (6), в частности, форму выполнения несущей балки (11), привода подающего механизма (7) и привода поворотного механизма (8), можно менять. Количество ползунов (12, 13) может быть больше двух, причем принадлежащие им приводы можно перекомпоновывать. Передающее устройство (6) может иметь, кроме того, свое собственное устройство управления для своих элементов и, в частности, для своих приводов (17, 26).
Как уже было сказано, подающий механизм (7) может иметь для двух или более двух не связанных между собой ползунов (12,13) отдельные приводы. Ползуны (12,13) могут перемещаться, таким образом, независимо друг от друга. Ползун (13) для инструмента или захватного рабочего органа (9) может иметь, например, отдельный привод движения, установленный неподвижно на несущей балке (11) или, альтернативно, на ползуне (13), и перемещаться. При независимом друг от друга движении ползунов поворотный механизм (8) может быть выполнен соответствующим образом. Для этого можно, например, установить на одном ползуне (13) соответствующий привод поворотного механизма. В другом варианте привод поворотного механизма (26), показанный в примерах выполнения, можно применять вместе со средством передачи (28), причем привод поворотного механизма (26) выполняет компенсирующие движения для отделения поворотного движения тела вращения (23) от движения перемещения ползуна или ползунов (12, 13).
Возможны варианты и в отношении формы выполнения робота или другого манипулятора (5). Представленное транспортировочное устройство (1) можно применять также и для других целей транспортировки, т.е. не только для описанного выше перемещения заготовок из листового металла между прессами (3, 4). Перемещение можно осуществлять также не только между соседними устройствами для обработки (3, 4), но и между межоперационными накопителями заготовок или т.п.
1 транспортировочное устройство
2 заготовка, заготовка из листового металла
3 устройство для обработки, пресс
4 устройство для обработки, пресс
5 робот, робот с шарнирно сочлененной рукой-манипулятором
6 передающее устройство
7 подающий механизм
8 поворотный механизм
9 захватный рабочий орган
10 рука-манипулятор робота
11 несущая балка, стрела
12 ползун вверху
13 ползун внизу
14 направляющая, рельсовая направляющая
15 каркас, корпус
16 приспособление для крепления рабочего органа
17 привод подающего механизма
18 мотор, серводвигатель
19 средство передачи, ременный привод
20 соединительное устройство, соединяющий ремень
21 поворот, поворотные ролики
22 поворотная ось
23 тело вращения
24 присоединение рабочего органа
25 муфта
26 поворотный привод
27 мотор, серводвигатель
28 средство передачи, трос
29 поворот, поворотные ролики
30 энергоцепь
31 соединительная линия
32 передача
33 ведущее колесо, шестерня
34 вал шестерни, шпиндель,
35 соединительный корпус
36 вал тела вращения, шпиндель
37 резьба вала шестерни
38 резьба вала тела вращения
39 поворотный ролик.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Робот к листоштамповочному прессу | 1983 |
|
SU1098624A1 |
| Промышленный робот | 1984 |
|
SU1268252A1 |
| Устройство для подачи заготовок в рабочую зону обрабатывающей машины | 1989 |
|
SU1754291A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПОДЛОЖЕК БЕЗ ОБРАЗОВАНИЯ ЧАСТИЦ | 2010 |
|
RU2510546C2 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ШНУРА-НАПОЛНИТЕЛЯ НА БОРТОВОЕ КОЛЬЦО ШИНЫ И СПОСОБ НАНЕСЕНИЯ ШНУРА-НАПОЛНИТЕЛЯ | 1997 |
|
RU2177879C2 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |






Изобретение относится к транспортировочному устройству для перемещения заготовок, в частности, из листового металла, между соседними накопителями или устройствами для обработки. Транспортировочное устройство имеет многоосный робот с захватным рабочим органом. Кроме того, оно имеет направляемое и управляемое роботом передающее устройство с подающим механизмом и поворотным механизмом для захватного рабочего органа. Робот имеет многоосную руку-манипулятор, на которой установлено передающее устройство, имеющее несущую балку, которая соединена с рукой-манипулятором робота и на которой расположено приспособление для крепления рабочего органа с возможностью сдвига и поворота относительно несущей балки. Приспособление для крепления рабочего органа имеет поворотную ось, направленную поперек его направлению подачи и параллельно соседней главной плоскости или направляющей плоскости рабочего органа несущей балки. В результате обеспечивается повышение эффективности транспортировочного устройства за счет усовершенствования кинематических связей. 2 н. и 28 з.п. ф-лы, 15 ил.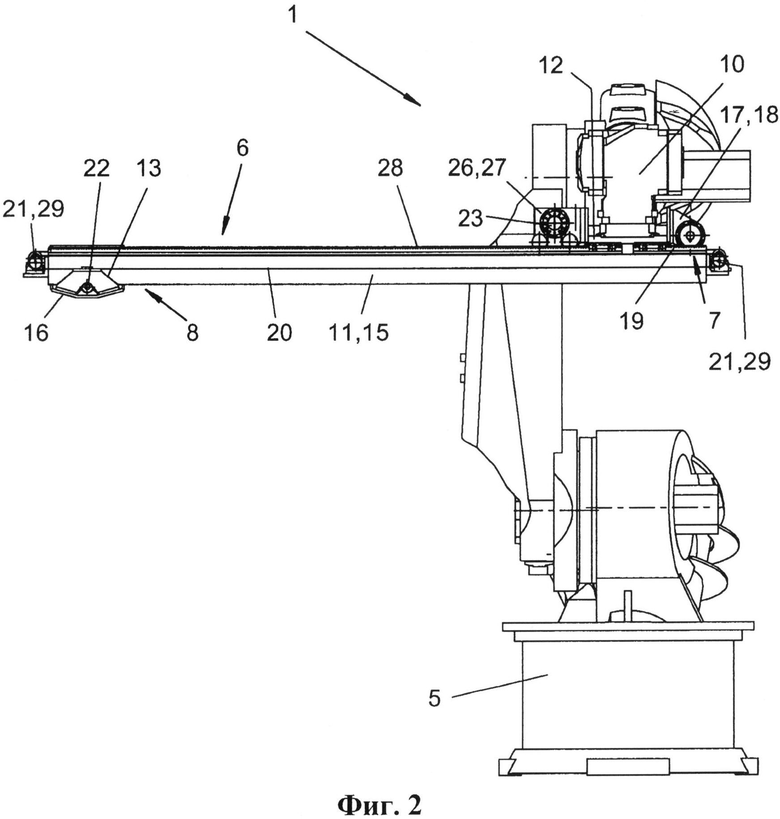
1. Транспортировочное устройство для перемещения заготовок (2) между соседними накопителями или устройствами для обработки (3, 4), содержащее многоосный робот (5) с захватным рабочим органом (9), отличающееся тем, что оно имеет направляемое и управляемое роботом (5) передающее устройство (6) с подающим механизмом (7) и поворотным механизмом (8) для захватного рабочего органа (9), причем робот (5) имеет многоосную руку-манипулятор (10), на которой установлено передающее устройство (6), имеющее несущую балку (11), которая соединена с рукой-манипулятором робота (10) и на которой расположено приспособление для крепления рабочего органа (16) с возможностью сдвига и поворота относительно несущей балки (11), при этом приспособление для крепления рабочего органа (16) имеет поворотную ось (22), направленную поперек его направлению подачи и параллельно соседней главной плоскости или направляющей плоскости рабочего органа несущей балки (11).
2. Транспортировочное устройство по п.1, отличающееся тем, что подающий механизм (7) и поворотный механизм (8) соединены с устройством управления робота и выполнены или управляемы в виде дополнительных осей робота (5).
3. Транспортировочное устройство по п.1, отличающееся тем, что робот с шарнирно-сочлененной рукой-манипулятором имеет шесть или более шести главных осей.
4. Транспортировочное устройство по п.1, отличающееся тем, что передающее устройство (6) имеет приспособление для крепления рабочего органа (16), которое выполнено с возможностью совершения поступательного и вращательного движения относительно руки-манипулятора робота (10) с помощью подающего и поворотного механизмов (7, 8).
5. Транспортировочное устройство по п.1, отличающееся тем, что передающее устройство (6) имеет несущую балку (11), которая соединена с рукой-манипулятором робота (10) и на которой расположено приспособление для крепления рабочего органа (16) с возможностью линейного перемещения относительно несущей балки (11).
6. Транспортировочное устройство по п.1, отличающееся тем, что несущая балка (11) удерживается с возможностью перемещения, в частности сдвига относительно руки-манипулятора робота (5).
7. Транспортировочное устройство по п.1, отличающееся тем, что подающий механизм (7) имеет ползун (12) для соединения с рукой-манипулятором робота (10) и ползун (13) для приспособления для крепления рабочего органа (16), которые расположены и ориентированы на несущей балке (11) с возможностью продольного перемещения.
8. Транспортировочное устройство по п.7, отличающееся тем, что ползуны (12, 13) установлены на разных сторонах несущей балки (11), в частности на ее верхней и нижней сторонах, в рельсовых направляющих (14) с возможностью перемещения.
9. Транспортировочное устройство по п.1, отличающееся тем, что приспособление для крепления рабочего органа (16) имеет поворотную ось (22), направленную параллельно нижней стороне несущей балки (11).
10. Транспортировочное устройство по п.1, отличающееся тем, что робот (5) удерживает несущую балку (11) таким образом, что движение подачи направлено между устройствами для обработки (3, 4) вдоль соединительной линии (31) и, по существу, горизонтально, причем поворотная ось (22) движения поворота направлена поперек движению подачи и, по существу, горизонтально.
11. Транспортировочное устройство по п.1, отличающееся тем, что поворотная ось (22) находится в области ползуна (13) или на расстоянии в области заготовки (2).
12. Транспортировочное устройство по п.1, отличающееся тем, что несущая балка (11) имеет несущую конструкцию (15) в виде коробчатого корпуса.
13. Транспортировочное устройство по п.1, отличающееся тем, что несущая балка (11) имеет энергоцепь (30), интегрированную в несущей конструкции (15).
14. Транспортировочное устройство по одному из пп. 1-13, отличающееся тем, что подающий механизм (7) и поворотный механизм (8) имеют управляемые приводы (17, 26).
15. Транспортировочное устройство по п.14, отличающееся тем, что управляемые приводы (17, 26) имеют электрические серводвигатели.
16. Транспортировочное устройство по п.14, отличающееся тем, что привод подающего механизма (17) и привод поворотного механизма (26) установлены на руке-манипуляторе робота (10) или на принадлежащем им ползуне (12).
17. Транспортировочное устройство по п.14, отличающееся тем, что привод подающего механизма (17) и привод поворотного механизма (26) в продольном направлении несущей балки (11) установлены друг за другом по обе ее стороны на ползуне (12).
18. Транспортировочное устройство по п.14, отличающееся тем, что привод подающего механизма (17) и привод поворотного механизма (26) установлены в поперечном направлении балки (11) напротив друг друга и по обе ее стороны на ползуне (12).
19. Транспортировочное устройство по одному из пп. 16-18, отличающееся тем, что привод подающего механизма (17) соединен с несущей балкой (11) с помощью средства передачи (19), в частности, с помощью реечной или ременной передачи.
20. Транспортировочное устройство по п.7, отличающееся тем, что ползуны (12, 13) соединены между собой обегающим по замкнутому кругу соединительным устройством (20) для передачи движения.
21. Транспортировочное устройство по п.7, отличающееся тем, что приспособление для крепления рабочего органа (16) установлено на принадлежащем ему ползуне (13) с возможностью поворота вокруг поворотной оси (22) и соединено с приводом поворотного механизма (26) обегающим по замкнутому кругу средством передачи (28).
22. Транспортировочное устройство по п.20 или 21, отличающееся тем, что обегающее по замкнутому кругу соединительное средство или средство передачи (20, 28) направлено в виде заканчивающейся или бесконечной петли по поворотным роликам (21, 29) на обоих концах несущей балки (11).
23. Транспортировочное устройство по п.21, отличающееся тем, что средство передачи (28) выполнено в виде троса и соединено с телом вращения (23) на приводе поворотного механизма (26) и на ползуне (13) с возможностью передачи вращения.
24. Транспортировочное устройство по п.23, отличающееся тем, что приспособление для крепления рабочего органа (16) соединено с телом вращения (23) на ползуне (13) напрямую или через передачу (32), в частности с дисковым кулачком и кулисным камнем.
25. Транспортировочное устройство по п.1, отличающееся тем, что поворотный механизм (8) имеет средство передачи (28) и соединенное с ним для надежного вращения ведущее колесо (33) со шпинделем (34), причем шпиндель (34) при помощи входящего в контакт перемещающегося по оси соединительного корпуса (35) с ходовыми гайками соединен с телом вращения (23) в форме шпинделя и приводит его во вращение.
26. Транспортировочное устройство по п.4, отличающееся тем, что приспособление для крепления рабочего органа (16) имеет присоединение для рабочего органа (24) и муфту (25) для захватного рабочего органа (9), приводимую в действие вручную или с помощью дистанционного управления.
27. Транспортировочное устройство по п.1, отличающееся тем, что робот (5) выполнен в виде робота с шарнирно сочлененной рукой-манипулятором.
28. Транспортировочное устройство по п.1, отличающееся тем, что устройства для обработки (3, 4) выполнены в виде прессов, а заготовки (2) выполнены в виде деталей из листового металла.
29. Способ транспортировки заготовок (2) между соседними накопителями или устройствами для обработки (3, 4), включающий перемещение заготовки (2) с помощью транспортировочного устройства (1), имеющего многоосный робот (5) и захватный рабочий орган (9), отличающийся тем, что заготовки (2) перемещают с помощью захватного рабочего органа (9), установленного с возможностью перемещения и поворота на направляемом и управляемым роботом (5) передающем устройстве (6), имеющем подающий механизм (7) и поворотный механизм (8), причем используют робот (5), имеющий многоосную руку-манипулятор (10), на которой установлено передающее устройство (6), имеющее несущую балку (11), которая соединена с рукой-манипулятором робота (10) и на которой расположено приспособление для крепления рабочего органа (16) с возможностью сдвига и поворота относительно несущей балки (11), причем приспособление для крепления рабочего органа (16) имеет поворотную ось (22), направленную поперек его направлению подачи и параллельно соседней главной плоскости или направляющей плоскости рабочего органа несущей балки (11).
30. Способ по п.29, отличающийся тем, что в качестве устройств для обработки (3, 4) используют прессы, а в качестве заготовок (2) - детали из листового металла.
| DE 202007010097 U1, 25.11.2007 | |||
| УСТРОЙСТВО для ПОДАЧИ полосовых ЗАГОТОВОК в РАБОЧУЮ ЗОНУ ПРЕССА | 0 |
|
SU376151A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЗАГОТОВКИ ОТ ПЕРВОГО СТАНКА К ВТОРОМУ СТАНКУ | 1991 |
|
RU2102239C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ И ХРАНЕНИЯ РАДИОАКТИВНЫХ ОТХОДОВ | 2006 |
|
RU2312414C1 |

