Изобретение относится к системам автоматического управления и может быть использовано при автоматическом управлении технологическими процессами с нестационарнь}ми параметрами,
Целью изобретения является повышение динамической точности системй.
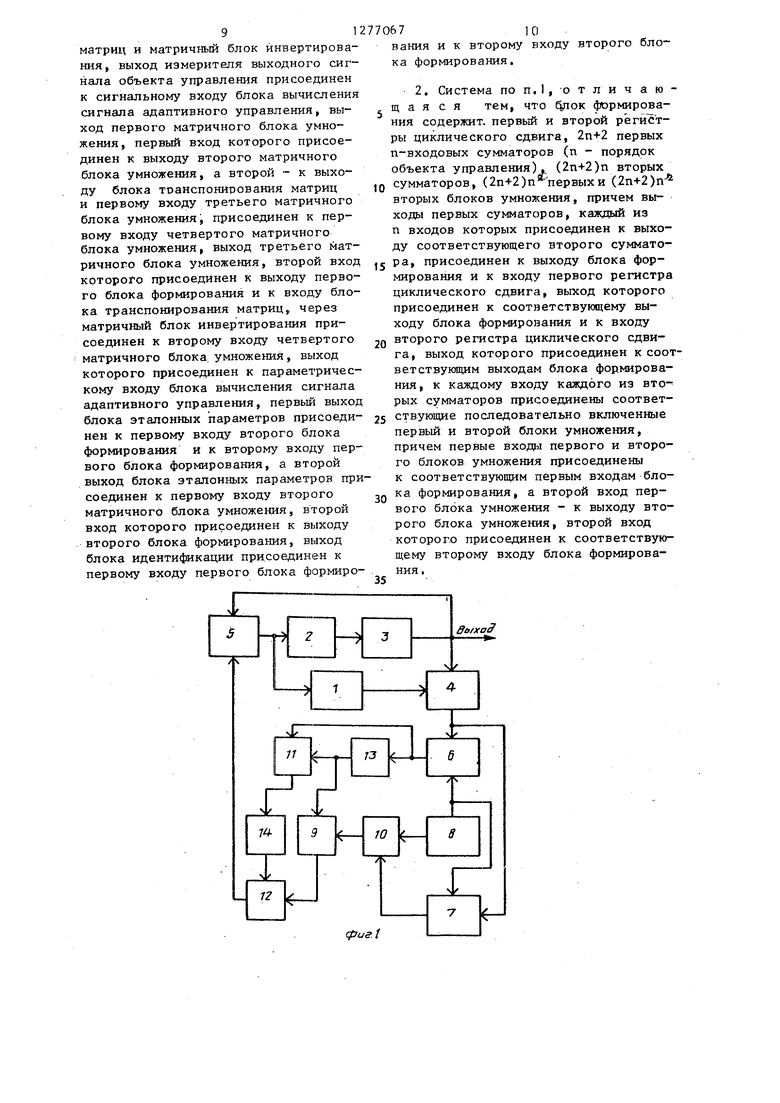
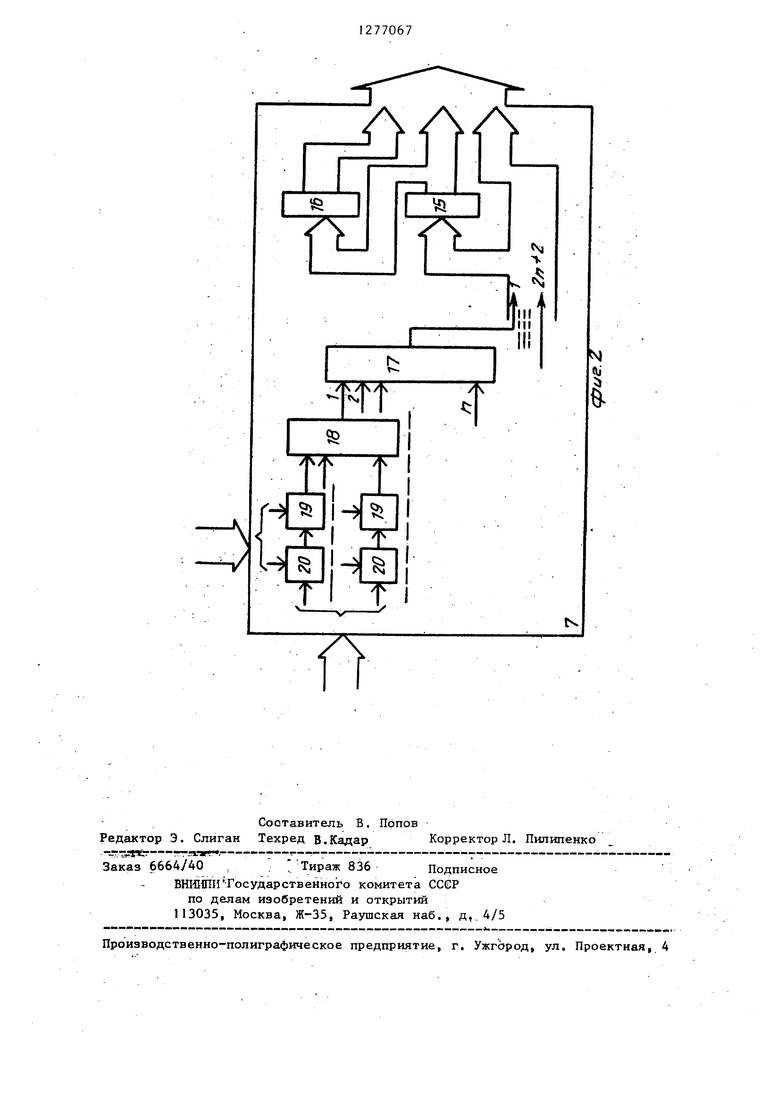
На фиг.1 схематически изобргжена адаптивная система управления нестационарным линейным объектом,, на на фиг. 2 - структурная схема формирователя .
Адаптивная система управления линейным объектом содержит блок 1 измерений управляющего воздействия, объект 2 управления, измеритель 3 выходного сигнала объекта 2 управления, блок 4 идентификациир блок 5 вычисления сигнала адаптивного управления. Выход блока 1 измерения уп- равляющего воздействия, вход которого присоединен к входу объекта 2 управления, присоединен с первому входу блока 4 идентификации, к второму входу которого присоединен выход измерителя 3 выходного сигнала, выход объекта 2 управления присоединен к входу измерителя 3 выходного сигнала.
Кроме того, в состав системы вхо- дят первый 6 и второй 7 блоки формирования, блок 8 эталонных параметров первый 9, второй 10, третий 11 и четвертый 12 матричные блоки умножения, блок 13 транспонирования матриц и матричный блок 14 инвертирования.. Блок 5 вычисления сигнала адаптивного управления выполнен в виде ПИД- регулятора с перестраиваемыми пара- метрами. Выход измерителя 3 выходно- го сигнала объекта 2 управления присоединен к сигнальному входу блока 5 вычисления сигнала .адаптивного управления. Выход первого матричного блока 9 умножения, первый вход кото- рого присоединен к выходу второго матричного блока 10 умножения, а второй - к выходу блока 13 транспонирования матриц и первому входу третьего матричного блока 11 умножения, присоединен к первому входу четвертого матричного блока 12 умножения. Выход третьего матричного блока 11 умножения, второй вход которого присоединен к выходу первого блока б формирования и к входу блока 13 транпонирования матриц через матричный блок 14 инвертирования присоединен
5
О
5 0
5 40 45 50 55 к второму входу четвертого матричного блока 12 умножения, выход которого присоединен к параметрическому входу блока 5 вычисления сигнала адаптивного управления. Первый выход блока 8 эталонных параметров присоединен к первому входу второго блока 7 формирования и Л второму входу первого блока 6 формирования, а второй выход блока 8 эталонных параметров присоединен к первому входу второго матричного блока 10 умножения, второй вход которого присоединен к выходу второго блока 7 формирования. Выход блока 4 Идентификации присоединен с первому входу первого блока 6 формирования и к второму входу второго блока 7 формирования,
В состав каждого блока 6 и 7 формирования входят (г.2) первый 15 и второй 16 регистры циклического сдвига, 2п+2 первых п-входовых сумматоров 17, где п - порядок объекта управления, (2п+2)п вторых сумматоров 18, (2nj;2)n первых 19 и (2п+2) вторых 20 блоков умножения, причем выходы первых сумматоров 17, каждый из п входов которых присоединен к выходу соответствующего второго сумматора 18, присоединены к выходу блока формирования и к входу первого регистра 15 циклического сдвига, выход которого присоединен к соответствующему выходу блока формирования, и к входу второго регистра 16 циклического сдвига, выход которого присоединен к соответствующим выходам блока формирования, К каждому входу каждого из вторых сумматоров 18 присоединены соответствующие последовательно включенные первый 19 и второй 20 блоки умножения, причем первые входы первого 19 и второго 20 блоков умножения присоединены к соответствующим первым входам блока формирования i а второй вход первого блока 19 умножения - к выходу второ-. го блока 20 умножения, второй вход которого присоединен к соответствующему второму входу блока формирования .
Система работает следующим образом.
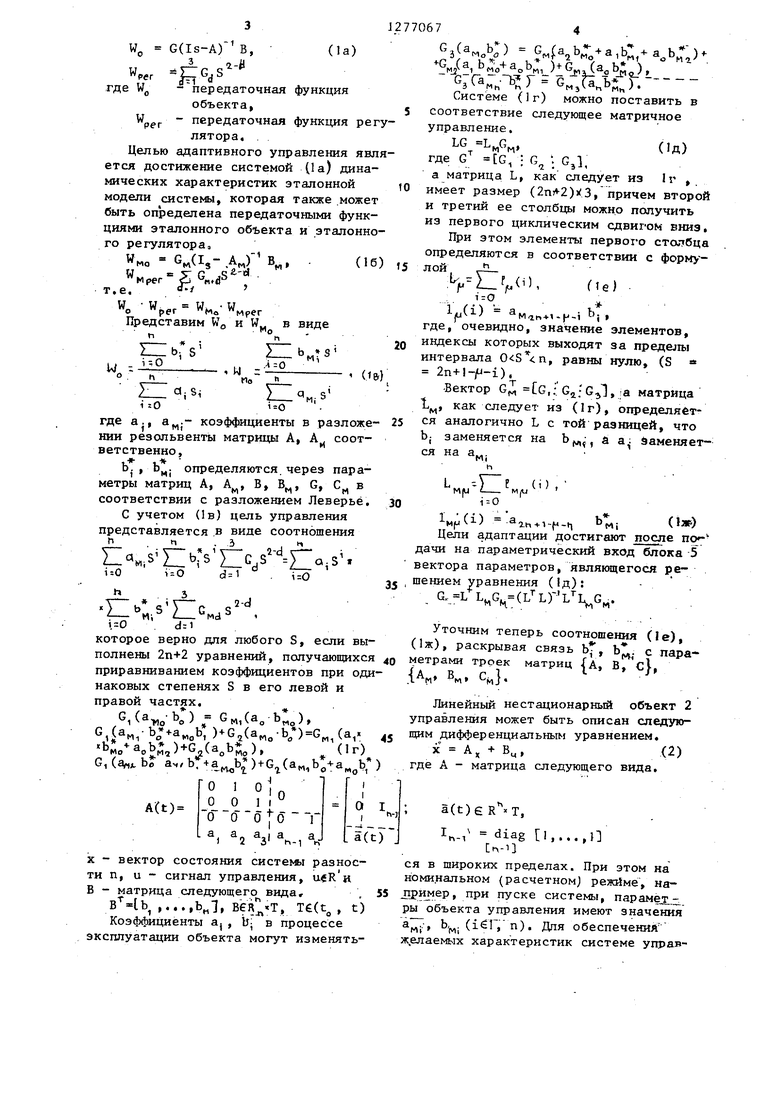
Объект управления и ПИД-регулятор в частотной области могут быть описаны следующими передаточными функциями.
Wo
где W.
G(Is-A) В,
(1а)
- передаточная функция
объекта,
Wpp - передаточная функция регулятора, .
Цепью адаптивного управления является достижение системой (1а) динамических характеристик эталонной модели системы, которая также .может быть определена передаточными функциями эталонного объекта и эталонного регулятора.
т.е.
МО
Мрег
G«(IS- АИ)
G«.
-1
В.
Ь/
м
(16)
W„ W.
W.. -W
о - per - Me Представим W
м
мрег
и W.. в По
п
W, ;
коэффициенты в разложегде а.,
НИИ резольвенты матрицы А, А соответственно,
Ь. , bj. определяются, через параметры матриц А, А, В, В, G, С в соответствии с разложением Леверьё.
С учетом (1в) цель управления представляется .в виде соотношения
Ev flbrs nc..
i 0V::0d 1.irO
n
2-d
Пь;.з ПСмаЗ .
. d:i которое верно для любого Уточним теперь соотношения (1 (1ж), раскрывая связь Ь, Ь. с
полнены 2п+2 уравнений, получающихся до метрами троек матриц (А, В, с1
приравниванием коэффициентов при одинаковых степенях S в его левой и правой частях.
.{А,,, В„, Cj,.
Линейный нестационарный объе управления может быть описан сле щим дифференциальным уравнением.
X - вектор состояния системы разности п, U - сигнал управления, u«R и В t)
матрица следующего вида,
,...,ь„1, вея, Te(t
Коэффициенты aj , Ij: в процессе эксплуатации объекта могут изменять
егувляаеткно16)
5
20
(1&)
жетавё.
25
30
)
,b;,+ aJ
с-га;,--ъ- г S
4
.ьЛ
(
)+С„,(а„Ь
.Ь,- а,Ъ
G...
),
ма
м Мо оЬм1 / ICIoy
- - - Н- , ч- - - - -
МОЖНО поставить
Системе (1г) можно поставить в соответствие следующее матричное управление.
LG .(1д)
Ьм«м.
10
где G С, : G . G,l, а матрица L, как следует из 1г имеет размер ()ХЗ, причем второй и третий ее столбцы можно получить из первого циклическим сдвигом вниз, При этом элементы первого столбца определяются в соответствии с формулой
:4.)
IrO
Xi)
f
a.
Oe)
-juv- / - Mao+i-p-i i где, очевидно, значение элементов, индексы которых выходят за пределы интервала , равны нулю, (S « 2n+l-jLi-i).
-Вектор G G,;. G,i.-G5l, la матрица 1, как следует из (1г), определяется аналогично L с той разницей, что
bj заменяется на Ь ся на а.
Ml
п
Mf
-0
Mt
йаменяет
(ЛР)
) iH-n-f -ii Mi Цели адаптации достигают после дачи на параметрический вход блока 5 вектора параметров, являющегося решением уравнения (1д): . G,L 4G(L4r L I G.
Уточним теперь соотношения (1е), (1ж), раскрывая связь Ь, Ь. с параетрами троек матриц (А, В, с1
метрами троек
.{А,,, В„, Cj,.
Линейный нестационарный объект 2 управления может быть описан следующим дифференциальным уравнением.
А, -Ь
В
ч
(2)
где А - матрица следующего вида.
a(t)e ,
In-.
diag 1, ... ,1
4-1
ся в широких пределах. При этом на номи.нальном (расчетном) режиме, на- пример, при пуске системы, параме.31- ры объекта управления имеют значения
Mi
b,j. (i€l, п) . Дпя обеспечения
ж.елаемых характеристик системе управления необходимо, чтобы параметры G, , G , GJ блока вычисления сигнала адаптивного управления, представляющего собой ПИД-регулятор, описываемый уравнением
, (t) - GjEj(t)G3E((t), (3) были равны номинальным величинам
Й1 ма мз , В уравнений (2)
Ej g - У,
Е, (
ЕЭ - EU), где g - сигнал управления системы,
у G , ...Ojx - выходной сигнал системы.
Номинальные значения параметров
M, Цд W2
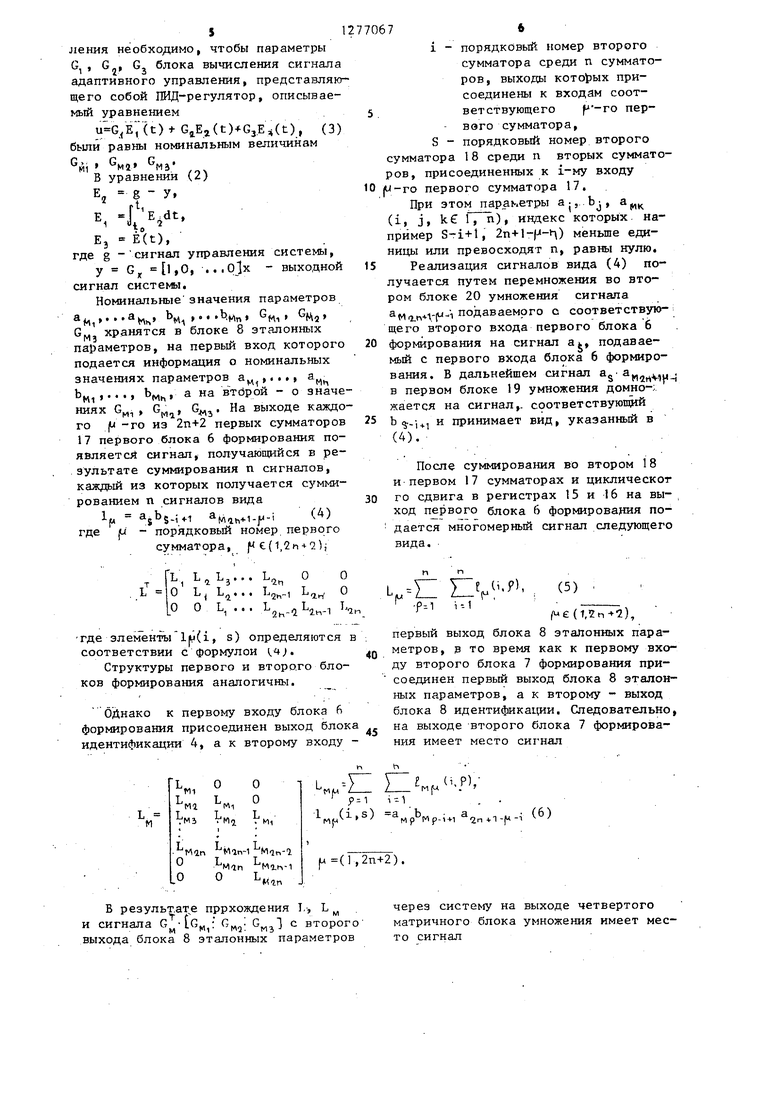
GI, хранятся в блоке 8 эталонных параметров, на первый вход которого подается информация о номинальных значениях параметров а,..,, а Ь ,.. ., Ь„, а на в тброй - о значениях GI, , G, . На выходе каждого ju -го из 2п+2 первых сумматоров 17 первого блока 6 формирования по- являетсй сигнал, получающийся в результате суммирования п сигналов, каждьй из которых получается суммированием п сигналов вида
l|u ajbs. .j.i(4)
где |u - порядковый номер первого сумматора, f е{1,2п + ;);
Чп
О
Т- Зн- Ч
о о
2н-1 2.ь-1 1.
где элементы l|M(i, s) определяются в соответствии с формулой {).
Структуры первого и второго блоков формирования аналогичны.
однако к первому входу блока 6 формирования присоединен выход блока идентификации 4, а к второму входу ь..-11 E:.. i-1 l,f.(i.s) .,, ,... (6)
(u(l,2n+2).
Б результат е пррхождения I,-, L и сигнала G,: G с второго выхода блока 8 эталонных параметров
1 - порядковый номер второго сумматора среди п сумматоров, выходы которых присоединены к входам соот- 5ветствующего р -го первого сумматора, S - порядковый номер второго сумматора 18 среди п вторых сумматоров, присоединенных к i-му входу 0 -го первого сумматора 17.
При этом параметры а
5
bj.
а
як
(i, j, k 1, n), индекс которых, например S-i+1, 2n+l-p- i) меньше единицы или превосходят п, равны нулю.
Реализация сигналов вида (4) получается путем перемножения во втором блоке 20 умножения сигнала а,v/,-|uJi подаваемого о соответствую- щего второго входа первого блока 6
0 формирования на сигнал а, подаваемый с первого входа блока 6 формирования. В дальнейшем сигнал ,,|., , в первом блоке 19 умножения домно-; жается на сигнал,, соответствуюпщй
5 b . i, и принимает вид, указанный в (4).
После суммирования во втором 18 и первом 17 сумматорах и циклическот 0 го сдвига в регистрах 15 и 16 на вы- ,
ход первого блока 6 формирования по- дается многомерный сигнал следующего вида,
L.H . (5) ,
.р-1 i -1 ..
fMe (l,),
первый выход блока 8 эталонных параметров, в то время как к первому входу второго блока 7 формирования присоединен первый выход блока 8 эталонных параметров, а к второму - выход блока В идентификации. Следовательно, на выходе второго блока 7 формирования имеет место сигнал
через систему на выходе четвертого матричного блока умножения имеет место сигнал
-, т.
. 7 .12
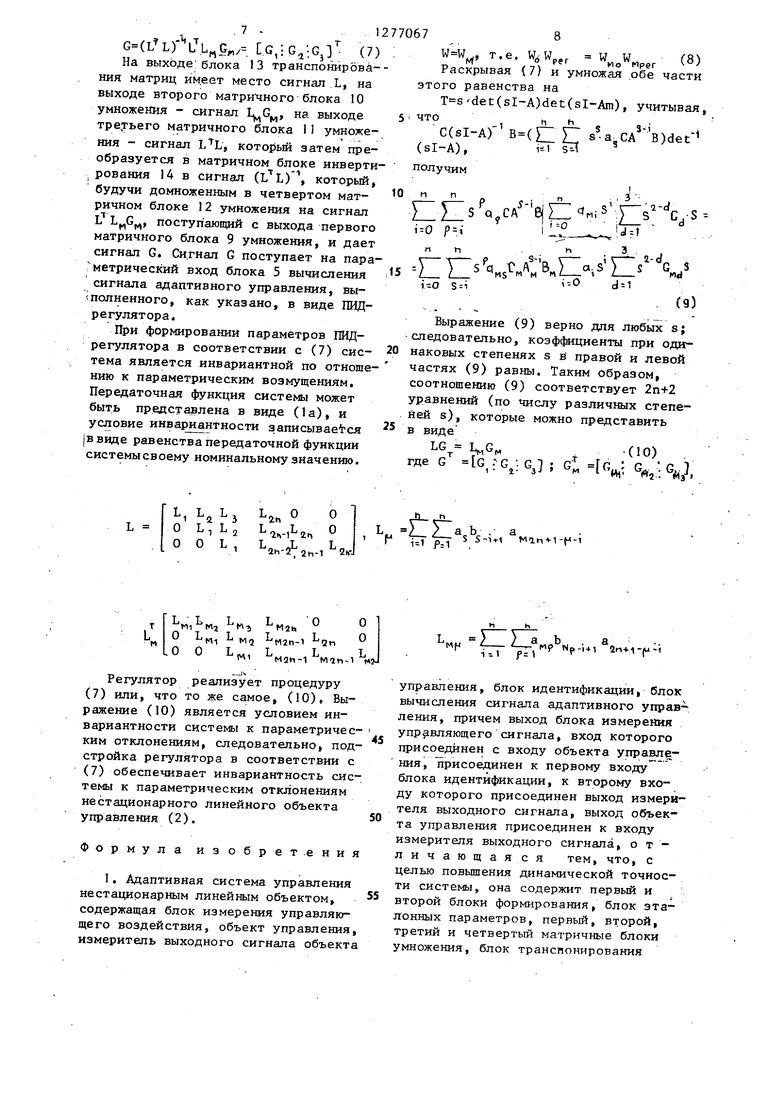
С( LG, (7) На выходе блока 13 транспонирования матриц имеет место сигнал .L, на выходе второго матричного блока 10 умножения - сигнал 1цG, на выходе третьего матричного блока 11 умножения - сигнал L L, который затем преобразуется в матричном блоке инверти рования 14 в сигнал () который, будучи домноженным в четвертом матричном блоке 12 умножения на сигнал L , поступающий с выхода первого матричного блока 9 умножения, и дает сигнал G. Сигнал G поступает на пара метрический вход блока 5 вычисления сигнала адаптивного управления, вы«полненного, как указано, в виде ПИД- регулятора.
При формировании параметров ПИД- регулятора в соответствии с (7) система является инвариантной по отношению к параметрическим возмущениям. Передаточная функция системы может быть представлена в виде (1а), и условие инвариантности записываемся
{ввиде равенства передаточной функции
системысвоему номинальному значению.
мэ
L 2
Ь„,
MZh
0
0 0
M2n-1 2n
Man-i Min-1
Регулятор реализует процедуру (7) или, что то же самое, (10). Выражение (10) является условием инвариантности системы к параметрическим отклонениям, следовательно, подстройка регулятора в соответствии с (7) обеспечивает инвариантность системы к параметрическим отклонениям нестационарного линейного объекта управления (2).
Формула изобрет.ения
I. Адаптивная система управления нестационарным линейным объектом, содержащая блок измерения управляющего воздействия, объект управления, измеритель выходного сигнала объекта
770678
: , т.е. W,W, W,,, (8) Раскрывая (7) и умножая обе части этого равенства на
T s--det(sI-A)det(sI-Ani), учитывая, 5 чтоf, f, .
C(sI-A) B( 51Г s a,CA B)det (sI-A),1--1 sH
получим
0 , , J
:CI-s4c«- 5 ;&-4. tt Afr i ° (9)
S i
Выражение (9) верно для любых s; следовательно, коэффициенты при одинаковых степенях s б правой и левой частях (9) равны. Таким образом, соотношению (9) соответствует 2п+2 уравнений (по числу различных степе- йей s), которые можно представить
в виде
LG .(10) .
G G,,7; G;, ; %
Pri
b .
s
0 0
MM
|гг
5
0
управления, блок идентификации, блок вычисления сигнала адаптивного управления, причем выход блока измерения управляющего сигнала, вход которого присоединен с входу объекта управл - ния, 11рисоединен к первому входу блока идентификации, к второму входу которого присоединен выход измерителя выходного сигнала, выход объекта управления присоединен к входу измерителя выходного сигнала, отличающаяся тем, что, с целью повышения динамической точности системы, она содержит первый и второй блоки формирования, блок эталонных параметров, первый, второй, третий и четвертый матричные блоки умножения, блок транспонирования
матриц и матричный блок инвертирования, выход измерителя выходного сигнала объекта управления присоединен к сигнальному входу блока вычисления сигнала адаптивного управления, выход первого матричного блока умножения, первый вход которого присоединен к выходу второго матричного блока умножения, а второй к выходу блока тоанспонирования матриц и первому входу третьего матричного блока умножения, присоединен к первому входу четвертого матричного блока умножения, выход третьего матричного блока умножения, второй вход ра, присоединен к выходу блока форкоторого присоединен к выходу первого блока формирования и к входу блока транспонирования матриц, через матричный блок инвертирования присоединен к второму входу четвертого матричного блока, умножения, выход которого присоединен к параметрическому входу блока вычисления сигнала адаптивного управления, первьш выход блока эталонных параметров присоединен к первому входу второго блока формирования и к второму входу первого блока формирования, а второй выход блока эталонных параметров присоединен к первому входу второго матричного блока умножения, второй вход которого присоединен к выходу второго блока формирования, выход блока идентификации присоединен к первому входу первого блока формиро
вания и к второму ка формирования.
10 входу
второго бло
2. Система по п.1, о т л и ч а ю - щ а я с я тем, что фюк формирования содержит, первьй и второй ры циклического сдвига, 2п+2 первых п-входовых сумматоров (п - порядок объекта управления),. (2п+2)п вторых сумматоров, (2п+2)п первыхи (2п+2)п вторых блоков умножения, причем выходы первых сумматоров, каждый из п входов которых присоединен к выходу соответствующего второго суммато
мирования и к входу первого регистра циклического сдвига, выход которого присоединен к соответствующему выходу блока формирования и к входу второго регистра циклического сдвига, выход которого присоединен к соответствующим выходам блока формирования , к каждому входу каждого из вторых сумматоров присоединены соответствующие последовательно включенные первый и второй блоки умножения, причем первые входы первого и второго блоков умножения присоединены к соответствующим первым входам блока формирования, а второй вход первого блока умножения - к выходу второго блока умножения, второй вход которого присоединен к соответствующему второму входу блока формирования ,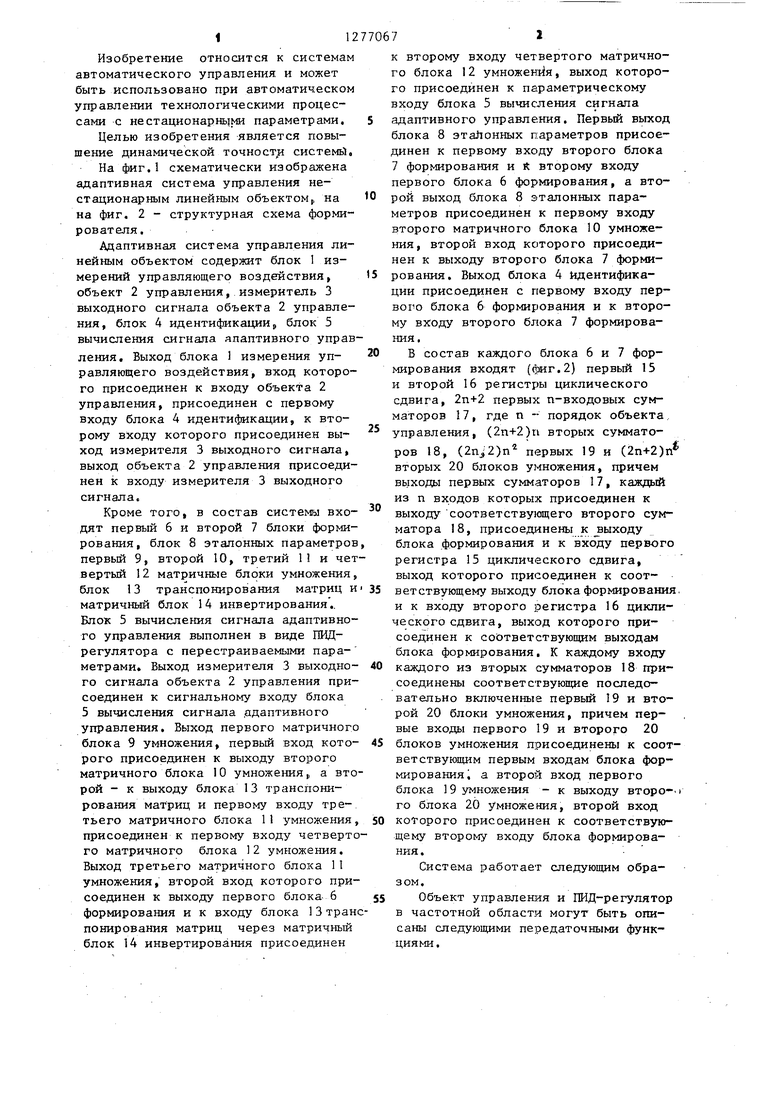
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1985 |
|
SU1553954A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| Устройство для магнитно-импульсной обработки деталей | 1973 |
|
SU470251A1 |
| Адаптивный измеритель параметров сигнала | 1981 |
|
SU970251A1 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
| Адаптивная диагностическая система | 1987 |
|
SU1441350A1 |
Изобретение относятся к автоматическому управлению и может быть использовано в системах автоматического управления преимущественно нестационарными процессами. Изобретение позволяет повысить динамическую точность адаптивных систем управления линеймями объектаьи. Отличием изобретения, обеспечивающего достижение поставленной цели, является то, что сигналы, соответствующие параметрам перестраиваемого регулятора, формируют последовательгын масштабированием многомерного сигнала, ком - поненты которого соответствуют параметрам регулятора на номинальном режиме, первым, вторым .и третьим многомерными сигналами. Причем компоненты первого, второго и третьего сигналов получают от сигналов, соответствующих действительным параметрам объекта и параметрам объекта на номиналЬи ом - режиме. Иаобретение может найти широкое применение в адаптивных системах автоматического управления линейными объектами. 1 з.п, ф-лы, 2 кп. § (Л J О Од 
| Крутько П.Д | |||
| Вариационные методы синтеза систем ци()(}оаыми регуляторами | |||
| М. | |||
| Советское радио, 1967, с | |||
| ПРИСПОСОБЛЕНИЕ, ЗАТРУДНЯЮЩЕЕ КРАЖУ ЭЛЕКТРИЧЕСКОЙ ЛАМПЫ | 1922 |
|
SU399A1 |
| Адаптивная система управления нестационарным объектом | 1978 |
|
SU792216A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
