Изобретение относится к области систем автоматического управления объектами с неизвестными параметрами и неизвестным ограниченным внешним возмущением.
Известны системы адаптивного управления:
1. Патент РФ RU (11) 2068196, кл. G05B 13/02, 1996.
2. Патент РФ RU (11) 1835215, кл. G05B 11/36, 1991.
3. Александров А.Г. 2007. "Адаптивное управление объектом с запаздыванием". Труды IX Международной Четаевской конференции "Аналитическая механика, устойчивость и управление движением посвященной 105-летию Н.Г.Четаева, том 3, Управление и оптимизация, стр.6-13, Иркутск.
Регулятор [1] не достигает цели, когда внешние возмущения, действующие на объект, неизвестны. Регулятор [2] не способен работать при неизвестных параметрах объекта. В регуляторе [3] на постоянную времени и запаздывание накладывается условие, которое в ряде случаев может нарушаться и тогда регулятор может привести к неустойчивости системы.
Наиболее близким к предлагаемому является регулятор [3], который содержит ПИД-регулятор, соединенный со входом объекта управления и с первым входом идентификатора, выход объекта управления соединен со вторым входом идентификатора, выход которого соединен со входом синтезатора, который соединен с первым входом ПИД-регулятора, второй вход которого соединен с выходом сумматора, входы которого соединены с выходом генератора испытательного сигнала и выходом объекта управления.
Недостатком этого регулятора является то, что он обеспечивает устойчивую работу системы при малых изменениях параметров объекта при переходе с режима на режим, а при больших изменениях параметров система может терять устойчивость.
Техническим результатом является обеспечение работы системы при больших изменениях параметров объекта при переходе с режима на режим.
Технический результат достигается тем, что в регуляторе, содержащем ПИД-регулятор, связанный выходом с входом объекта управления и первым входом идентификатора, выход объекта управления соединен со вторым входом идентификатора, выход которого соединен со входом синтезатора, первый выход которого подключен к первому входу ПИД-регулятора, второй вход ПИД-регулятора подключен к выходу сумматора, первый вход которого соединен с выходом объекта управления, второй вход сумматора соединен с выходом генератора испытательного сигнала, введены И-регулятор, блок управления и блок самонастройки амплитуд испытательного сигнала, генератор испытательного сигнала настроен так, чтобы периоды испытательных частот были кратны периоду дискретности, при этом выход ПИД-регулятора соединен с первым входом блока управления, выход которого соединен со входом объекта управления и первым входом идентификатора, второй вход блока управления соединен с выходом И-регулятора, вход которого подключен к выходу сумматора, с третьим входом блока управления соединен второй выход синтезатора, выход объекта управления соединен с четвертым входом блока управления и с входом блока самонастройки амплитуд испытательного сигнала, выход которого соединен со входом генератора испытательного сигнала.
Изобретение поясняется чертежом, на котором изображена структурная схема самонастраивающегося ПИД-регулятора.
Самонастраивающийся ПИД-регулятор содержит ПИД-регулятор 1, соединенный выходом с первым входом блока управления 8, выход которого соединен со входом объекта управления 2 и с первым входом идентификатора 3, выход объекта управления 2 соединен со вторым входом идентификатора 3, выход которого соединен со входом синтезатора 4, первый выход которого соединен с первым входом ПИД-регулятора 1, вход которого подключен к выходу сумматора 5, выход которого соединен со входом И-регулятора 7, выход которого подключен ко второму входу блока управления 8, третий вход которого подключен ко второму выходу синтезатора 4, четвертый вход блока управления 8 подключен к выходу объекта управления 2, который также подключен к первому входу сумматора 5, второй вход которого соединен с генератором испытательного сигнала 6, вход которого соединен с выходом блока 9 настройки амплитуд испытательного сигнала, вход которого соединен с выходом объекта управления 2.
Система работает следующим образом. На вход объекта управления поступает сигнал управления с блока управления 8, который подключает ПИД-регулятор 1 либо И-регулятор 7. Подключение И-регулятора 7, вместо ПИД-регулятора 1, осуществляется когда выход объекта близок к недопустимому значению, а подключение ПИД-регулятора 1 осуществляется по окончании самонастройки. ПИД-регулятор настраивается синтезатором 4, в котором вычисляются коэффициенты ПИД-регулятора 1, используя оценки коэффициентов объекта, получаемые идентификатором 3. Для работы идентификатора необходим полигармонический испытательный сигнал, который является суммой гармоник, формируемых генератором испытательного сигнала 6. Амплитуды гармоник испытательного сигнала настраиваются блоком 9 настройки амплитуд испытательного сигнала таким образом, чтобы влияние испытательного сигнала на выход объекта было малым по сравнению с действием внешнего возмущения. Испытательный сигнал, сигнал с блока настройки амплитуд испытательного сигнала, задающее воздействие и сигнал выхода объекта управления складываются сумматором 5, и результат подается на второй вход ПИД-регулятора 1, и таким образом испытательный сигнал, пройдя через объект, поступает в идентификатор 3.
Опишем реальный алгоритм работы адаптивного ПИД-регулятора [3], реализованного в цифровом виде на промышленном контроллере.
ПИД-регулятор 1 вырабатывает управляющий сигнал uPID(t) и описывается следующим уравнением:

где ε(t) - ошибка слежения, формируемая сумматором 5.
Идентификатор 3 содержит:
а) Фильтр Фурье.
Выдает Фурье коэффициенты, формируемые как
где ayi(N), byi(N), aui(N), bui(N) - Фурье коэффициенты, ρi и ωi(i=1, 2) - амплитуды и частоты испытательного сигнала, формируемого генератором испытательного сигнала 6, h - интервал дискретности.
б) Вычислитель частотных параметров объекта.
Находит оценки частотных параметров объекта по формулам

где αi и βi - частотные параметры объекта управления.
в) Вычислитель оценок коэффициентов объекта.
Находит оценки коэффициентов объекта по формулам


где  - оценки коэффициентов объекта.
- оценки коэффициентов объекта.
Синтезатор 4 находит коэффициенты ПИД-регулятора 1 по формулам:

где λ - некоторое заданное малое число, определяющее динамику замкнутой системы.
Сумматор 5 производит суммирование поступающих на него сигналов и на выходе формирует ошибку слежения

где ysp(t) - отслеживаемая величина (уставка), v(t) - испытательный полигармонический сигнал, y(t) - измеряемый выход объекта управления.
Генератор испытательного сигнала 6 формирует испытательный сигнал

где ρi и ωi (i=1, 2) - положительные числа. Частоты ωi (i=1, 2) известны.
В предлагаемом изобретении измененные, а также добавленные блоки имеют следующие алгоритмы.
Генератор испытательного сигнала 6 формирует полигармонический испытательный сигнал

где ρi и  - положительные числа, m - четное число гармоник испытательного сигнала.
- положительные числа, m - четное число гармоник испытательного сигнала.
Частоты  вычисляются с помощью граничных частот, следующим образом:
вычисляются с помощью граничных частот, следующим образом:
 ,
,  ,
, 
где ωmin и ωmах - граничные частоты, вычисляемые на основании заданных границ параметров объекта (постоянной времени  и запаздывания
и запаздывания  , как
, как

q - целое число, такое, что
[·] - означает целую часть.
После расчета частот, они преобразуются так, чтобы период частоты ω1 был кратен периоду дискретности, а остальные частоты были кратны полученной частоте.
Идентификатор 3 содержит:
а) Фильтр Фурье.
Алгоритм работы описывается формулой (2), в которой 
б) Вычислитель частотных параметров объекта.
Частотные параметры объекта вычисляются на основе формулы (3), где
в) Вычислитель оценок коэффициентов объекта.
Находит оценки коэффициентов объекта, используя формулы
 ,
, 
где α1 (1) и β1 (1) вычисляются как

Синтезатор 4 находит коэффициенты ПИД-регулятора 1 но формулам (6), после чего выдает сигнал подключения ПИД-регулятора коммутатору 8.
Добавлены следующие блоки:
А. И-Регулятор 7 вырабатывает управляющий сигнал uI(t) и описывается следующим уравнением:

где kci определяется по заданным границам коэффициентов объекта.
Б. Блок управления 8, выполняет переключение между ПИД-регулятором и И-регулятором.
Подключение И-регулятора осуществляется в момент времени ta, которое определяется равенством

где у* - заданное значение, близкое к критическому (недопустимому) значению выхода объекта.
Подключение ПИД-регулятора осуществляет в момент времени tb (tb>ta), которое определяется синтезатором 4 и свидетельствует об окончании самонастройки ПИД-регулятора.
В. Блок самонастройки амплитуд испытательного сигнала 9 настраивает базовую амплитуду ρb, которая связана с амплитудами испытательного сигнала (9) следующим выражением:

Настройка базовой амплитуды осуществляется с помощью двух следующих коэффициентов:
коэффициента интенсивности внешнего возмущения

где Рmax - время вычисления коэффициента,
и коэффициента влияния испытательного сигнала
где yυ(t) - выход объекта при подаче на вход сумматора 5 испытательного сигнала.
Для настройки амплитуд испытательного сигнала необходимо задать требуемое значение коэффициента влияния испытательного сигнала 
Алгоритм настройки амплитуд следующий:
1) положить предыдущее значение коэффициента влияния испытательного сигнала равным нулю 
2) вычислить коэффициент интенсивности внешнего возмущения (19);
3) вычислить базовую амплитуду испытательного сигнала ρb, используя формулу

где χ - коэффициент уменьшения, aευ - модуль частотной передаточной функции на настраиваемой частоте ω1, определяется как

где αευ и βευ вычисляются через нижние границы коэффициентов объекта как

4) подать сигнал настройки вида υ(t)=ρbsinω1t на вход сумматора 5 и вычислить коэффициент влияния испытательного сигнала (20);
5) если выполняется условие  то уменьшить базовую амплитуду в два раза
то уменьшить базовую амплитуду в два раза  , и если выполняется условие для предыдущего значения коэффициента влияния испытательного сигнала
, и если выполняется условие для предыдущего значения коэффициента влияния испытательного сигнала  то перейти к пункту 8;
то перейти к пункту 8;
6) если выполняется условие  то увеличить базовую амплитуду в два раза ρb=2ρb, и если выполняется условие для предыдущего значения коэффициента влияния испытательного сигнала
то увеличить базовую амплитуду в два раза ρb=2ρb, и если выполняется условие для предыдущего значения коэффициента влияния испытательного сигнала  то перейти к пункту 8;
то перейти к пункту 8;
7) положить  и перейти к пункту 4;
и перейти к пункту 4;
8) вычислить амплитуды испытательного сигнала по формуле (18).
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная электрогидравлическая следящая система с модулированной осцилляцией | 2016 |
|
RU2627956C1 |
| Способ адаптивного управления плохо формализуемым объектом | 2016 |
|
RU2612084C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| ЧАСТОТНАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2413270C2 |
| Автоматический нейросетевой настройщик параметров ПИ-регулятора для управления нагревательными объектами | 2016 |
|
RU2644843C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
Изобретение относится к области систем автоматического управления объектами с неизвестными параметрами и неизвестным ограниченным внешним возмущением. Техническим результатом изобретения является обеспечение работы системы при больших изменениях параметров объекта при переходе с режима на режим. Регулятор содержит ПИД-регулятор, связанный выходом с входом объекта управления и первым входом идентификатора, выход объекта управления соединен со вторым входом идентификатора, выход которого соединен со входом синтезатора, первый выход которого подключен к первому входу ПИД-регулятора, второй вход ПИД-регулятора подключен к выходу сумматора, первый вход которого соединен с выходом объекта управления, второй вход сумматора соединен с выходом генератора испытательного сигнала, введены И-регулятор, блок управления и блок самонастройки амплитуд испытательного сигнала, генератор испытательного сигнала настроен так, чтобы периоды испытательных частот были кратны периоду дискретности, при этом выход ПИД-регулятора соединен с первым входом блока управления, выход которого соединен со входом объекта управления и первым входом идентификатора, второй вход блока управления соединен с выходом И-регулятора, вход которого подключен к выходу сумматора, с третьим входом блока управления соединен второй выход синтезатора, выход объекта управления соединен с четвертым входом блока управления и с входом блока самонастройки амплитуд испытательного сигнала, выход которого соединен со входом генератора испытательного сигнала. 1 ил.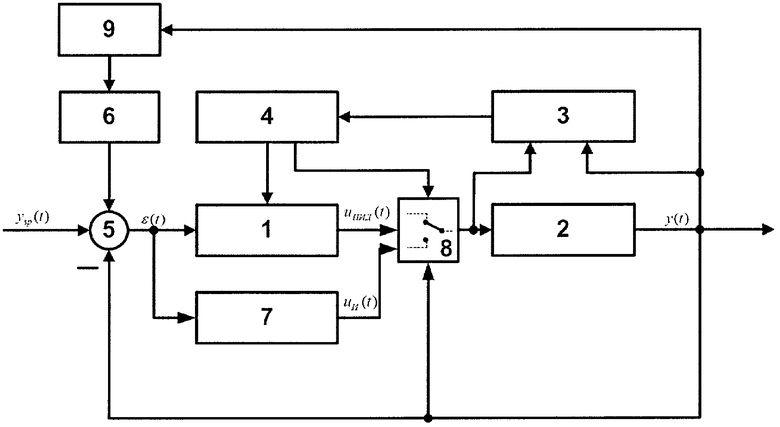
Самонастраивающийся ПИД-регулятор, содержащий ПИД-регулятор, связанный выходом с входом объекта управления и первым входом идентификатора, выход объекта управления соединен со вторым входом идентификатора, выход которого соединен со входом синтезатора, первый выход которого подключен к первому входу ПИД-регулятора, второй вход ПИД-регулятора подключен к выходу сумматора, первый вход которого соединен с выходом объекта управления, второй вход сумматора соединен с выходом генератора испытательного сигнала, отличающийся тем, что введены И-регулятор, блок управления и блок самонастройки амплитуд испытательного сигнала, генератор испытательного сигнала настроен так, чтобы периоды испытательных частот были кратны периоду дискретности, при этом выход ПИД-регулятора соединен с первым входом блока управления, выход которого соединен со входом объекта управления и первым входом идентификатора, второй вход блока управления соединен с выходом И-регулятора, вход которого подключен к выходу сумматора, с третьим входом блока управления соединен второй выход синтезатора, выход объекта управления соединен с четвертым входом блока управления и с входом блока самонастройки амплитуд испытательного сигнала, выход которого соединен со входом генератора испытательного сигнала.
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| SU 1835215 A3, 20.02.1996 | |||
| АЛЕКСАНДРОВ А.Г | |||
| Адаптивное управление объектом с запаздыванием | |||
| - Иркутск, 2007 | |||
| В: «Труды IX Международной Четаевской конференции «Аналитическая механика, устойчивость и управление движением», посвященной 105-летию Н.Г.Четаева», т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 4903192, 20.02.1990. | |||

