Группа изобретений относится к области транспортных средств, преимущественно к железнодорожному транспорту, и касается контроля функционального состояния машиниста поезда и его готовности осуществлять профессиональную деятельность.
Известны способ поддержания работоспособности водителя транспортного средства и система для его осуществления. Способ включает определение текущего значения физиологических параметров машиниста с использованием, например, телемеханической системы контроля бодрствования машиниста (ТСКБМ) и анализ адекватности реакции водителя путем подачи по меньшей мере одного вопроса (команды) в виде звукового или зрительного стимула и команды, требующего осознанного ответа водителя. Выбор вопроса в каждом цикле "вопрос-ответ" осуществляется случайным образом для исключения привыкания. Определяют реакцию водителя и при смысловом соответствии вопроса и ответа определяют соответствие состояния водителя критериям работоспособности (патент РФ №2111134, МПК 6 В60К 28/06, 1997 г. - прототип).
Недостаком известного решения является отсутствие привязки проверки работоспособности к моментам прохождения поездом участков пути, требующих повышенного внимания машиниста или его незамедлительных действий по управлению поездом. Недостаточная информированность машиниста о приближении к участку, требующему готовности к действию, не позволяет добиться оптимального режима управления движением поезда.
Известно использование локомотивных устройств индикации, отображающих текущую информацию, необходимую для безопасного ведения поезда, при этом возможно использование световой и звуковой сигнализации, включающейся при изменении наиболее важных с точки зрения обеспечения безопасности параметров (патент RU 2265539, МПК B61L 3/12, заявка PCT/US2007/080575, G06F 19/00).
Недостатком известных локомотивных систем индикации является отсутствие подтверждения машинистом его готовности выполнять управляющие действия на данном текущем отрезке пути, требующем повышенного внимания.
Задачей группы изобретений является разработка принципов и системы контроля работоспособности машиниста поезда, обеспечивающих безопасность и оптимальные режимы движения поезда.
Технический результат состоит в обеспечении контроля работоспособности машиниста с получением его ответной реакции при прохождении участков пути, значимых для обеспечения безопасности движения транспортного средства.
Система контроля работоспособности машиниста поезда обеспечивает ввод текущей информации об опасных участках пути, ввод требований подтвердить готовность машиниста к выполнению необходимых управляющих операций и анализ реакции машиниста при выполнении требований.
Технический результат достигается тем, что в способе контроля работоспособности машиниста поезда, включающем определение текущего значения физиологических параметров машиниста, ввод текущей информации об условиях движения поезда, подача машинисту по меньшей мере одной случайным образом выбранной команды, требующей ответа, и определение соответствия состояния машиниста критериям работоспособности при смысловом соответствии команды и ответа, согласно изобретению используют базу данных координат и описаний потенциально опасных участков пути маршрутов следования поезда с присвоением опасным участкам случайным образом кодов, координаты и коды опасных участков отображают на электронной карте модуля визуализации, при этом соответствие состояния машиниста критериям работоспособности определяют при смысловом соответствии команды и ответа, заключающемся в безошибочном наборе машинистом кода текущего опасного участка пути, активизированного на модуле индикации, и передают информацию о работоспособности машиниста в автоматическую систему управления поездом.
Система контроля работоспособности машиниста поезда содержит систему контроля бодрствования машиниста, блок контроля готовности машиниста и модуль визуализации команд. Согласно изобретению модуль визуализации выполнен с возможностью отображения на электронной карте потенциально опасных участков пути маршрутов следования поезда с их координатами, описанием и кодами.
Осуществление группы изобретений иллюстрируется чертежами:
Фиг.1 - схема функционирования системы контроля работоспособности машиниста поезда совместно с автоматической системой управления поездом;
Фиг.2 - функциональная схема системы контроля работоспособности машиниста поезда;
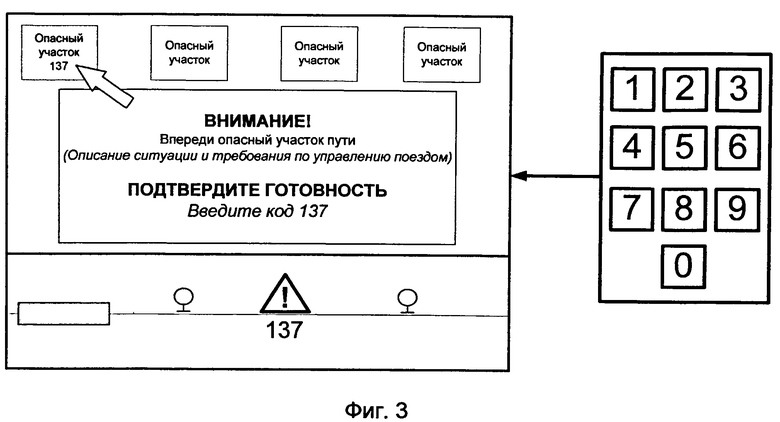
Фиг.3 - модуль визуализации;
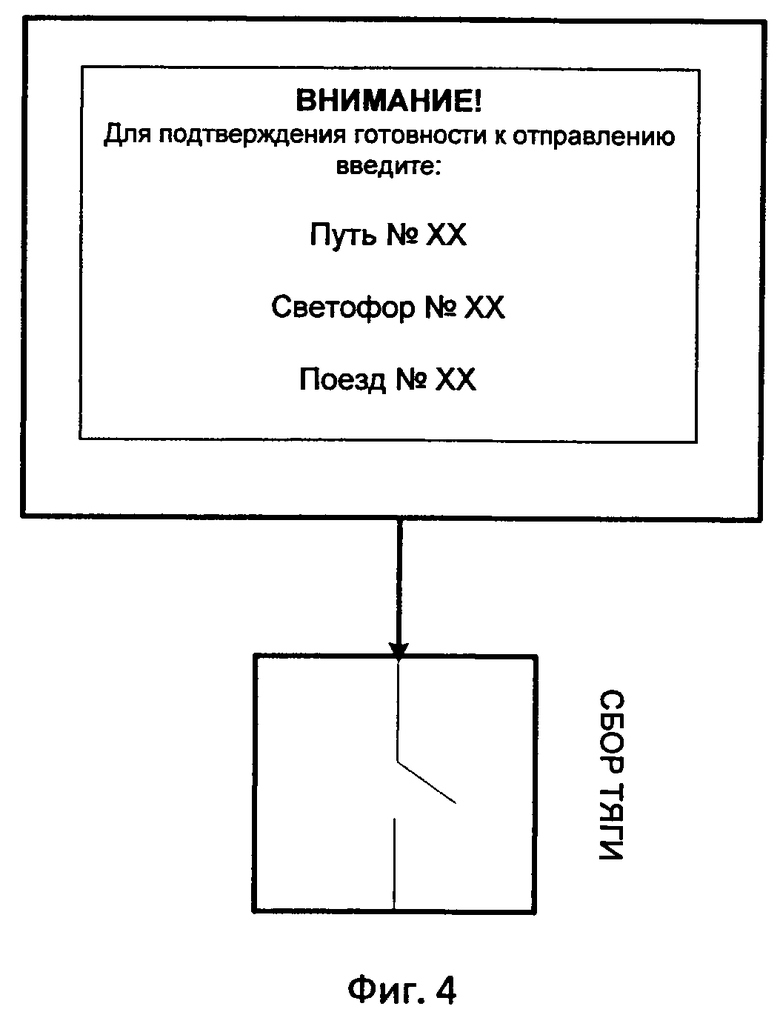
Фиг.4 - пример отображения запроса машинисту для сбора тяги;
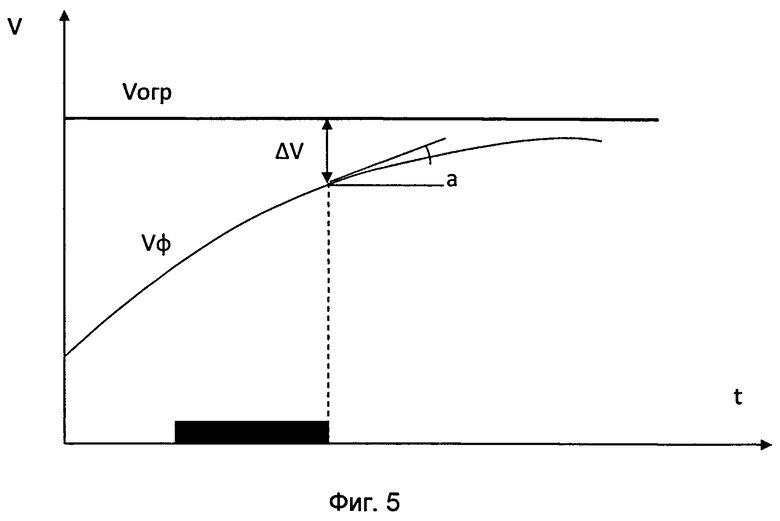
Фиг.5 - пример отображения запроса машинисту при скоростных ограничениях.
Система контроля работоспособности машиниста поезда (СКРМ) - это комплекс аппаратно-программных решений, предназначенный для повышения уровня безопасности ведения поезда за счет контроля готовности машиниста к своевременному и безошибочному выполнению операций управления, и является дополнением к существующим автоматическим системам поезда по управлению тягой и торможением, имеющим в своем составе датчики для регистрации параметров работы локомотива и исполнительные устройства для управления автоматическими тормозами поезда и цепями управления тягой (далее автоматическая система управления поездом) (фиг.1).
СКРМ содержит телемеханическую систему контроля бодрствования машиниста 1 (ТСКБМ). Блок контроля готовности машиниста 2 (БКГМ) оповещает машиниста о подходе к участкам пути, на которых по статистике систематически допускаются нарушения требований безопасности управления поезда, связанные с так называемым человеческим фактором. При этом СКРМ требует осмысленного подтверждения готовности к выполнению конкретных управляющий операций.
СКРМ функционирует в комплексе с существующими автоматическими системами управления поездом, получая от них данные о текущей скорости, местоположении поезда, характеристик поезда, данных с АЛС и другие данные, а также осуществляет передачу команд управления поездом, таких как служебное торможение, разбор схемы тяги в исполнительные устройства автоматической системы управления поездом. ТСКБМ 1, выход которой соединен с входом БКГМ 2, непрерывно передает информацию о психофизиологическом состоянии машиниста. При получении сигналов с ТСКБМ 1 о снижении уровня бодрствования машиниста СКРМ формирует дополнительный запрос о готовности машиниста выполнять управляющие операции.
БКГМ 2 выполнен с возможностью обмена информацией с модулем визуализации 3 автоматической системы управления поездом, снабженным средством ввода данных.
СКРМ функционирует следующим образом: получая данные о текущей скорости, текущем ограничении скорости, профиле пути, параметрах поезда и местоположении поезда от автоматической системы управления поездом, СКРМ выявляет потенциально опасные ситуации и участки пути, требующие особой бдительности машиниста. Кроме того, дополнительно в базе данных БКГМ 2 хранятся координаты и описания всех потенциально опасных участков пути, где систематически допускаются ошибки управления. Эти участки пути отображаются на электронной карте модуля визуализации 3. Около изображения опасного участка отображается его условный код, присваиваемый случайным образом для исключения машинального (подсознательного) отклика машиниста на запрос о его готовности. Интерфейс модуля визуализации 3 предусматривает наличие окон, располагающихся, например, в верхней его части и содержащих краткую информацию о возможной опасности впередилежащего участка пути. Для предупреждения машиниста по ходу движения поезда курсор управления автоматически перемещается к окну, содержащему информацию о ближайшей возможной опасности (фиг.3).
На определенном расстоянии (зависящем от скорости движения поезда и времени, требуемом машинисту на выполнение действий по подтверждению готовности) до выполнения действий по управлению поездом на модуле визуализации системы управления поездом появляется сообщение с описанием опасного участка и требованием подтвердить готовность машиниста к выполнению конкретной управляющей операции путем ввода машинистом условного кода приближающегося опасного участка. Для привлечения внимания машиниста вывод информации сопровождается специальным звуковым сигналом. При ошибочном вводе кода машинистом или отсутствии отклика от машиниста срабатывает световая и звуковая сигнализация, и СКРМ генерирует повторный запрос. Если отклика машиниста на повторный запрос не последовало или отклик оказался ошибочным, СКРМ автоматически осуществляет служебное или экстренное торможение поезда.
Далее приводятся примеры, каким образом СКРМ контролирует готовность машиниста в следующих потенциально опасных ситуациях
1) Подтверждение готовности машиниста при приближении поезда к координате начала торможения.
При приближении поезда на расстояние L к участку пути, на котором должно быть произведено торможение (участки пути, на которых производится служебное торможение, прогнозируются и определяются исходя из текущей ситуации на пути следования поезда и зависят от фактической скорости поезда, текущего и впередилежащего ограничения скорости, профиля пути, характеристик поезда и т.д., а также исходя из данных по опасным участкам, хранящихся во внутренней базе данных БКГМ 2), на модуль визуализации 3 системы управления поездом поступает сигнал и проводится проверка готовности машиниста к служебному торможению.
В случае если машинист допустил ошибку при отклике или не подтвердил предупреждение в течение заданного времени, срабатывают световая индикация и звуковая сигнализация, и СКРМ выдает повторный запрос. При отсутствии отклика машиниста на повторный запрос СКРМ начинает осуществлять служебное торможение автоматически.
В случае если машинист подтвердил готовность, движение поезда продолжается в штатном режиме до координаты начала торможения.
2) Подтверждение для сбора тяги перед отправлением. Для исключения ситуации ошибочного или машинального переключения машинистом контролера в тяговую позицию перед отправлением поезда СКРМ проверяет готовность машиниста путем вывода на модуль визуализации 3 запроса о готовности машиниста и подтверждения отправления поезда. Для подтверждения сбора тяги машинист должен ввести в БКГМ 2 служебную информации о номере пути, номере поезда, номере светофора и т.п., тем самым снижая вероятность подсознательного (машинального) переключения в тяговую позицию. СКРМ сравнивает введенные машинистом данные с данными, полученными от автоматической системы управления поездом. При совпадении данных, введенных машинистом и данных, полученных от системы управления поездом, СКРМ выдает команду исполнительному устройству на сбор тяги.
При этом при наличии в автоматической системе управления поездом функции «Подтяг» СКРМ может допускать движение поезда с допустимой скоростью Vдоп. на допустимое расстояние Sдоп. без проверки готовности машиниста в соответствии с алгоритмом работы данной функции в автоматической системе управления поездом.
3) Скоростные ограничения (является частным случаем п.1).
При приближении фактической скорости поезда Vф к текущему ограничению скорости Vогр (допустимой скорости) на величину ΔV и при таком продольном ускорении a, при котором возможно превышение допустимой скорости, на модуль визуализации 3 выдается предупреждение о приближении фактической скорости к допустимой с требованием подтвердить машинистом текущую скорость движения поезда (подтвердить понимание машинистом факта приближения фактической скорости к допустимой) путем нажатия клавиши, выбранной системой случайным образом (фиг.5).
При нажатии машинистом правильной клавиши СКРМ продолжает функционировать в штатном режиме, контролируя превышение фактической скорости над допустимой, не выводя дополнительных предупреждений на экран модуля визуализации 3.
При неверном отклике машиниста СКРМ подает звуковой сигнал и выводит на модуль визуализации 3 повторный запрос. Если в течение определенного времени отклика машиниста на повторный запрос не последовало или отклик машиниста снова оказался ошибочным, а также фактическая скорость продолжает увеличиваться, СКРМ дает команду на служебное торможение.
4) Смена сигнала светофора.
При смене сигнала локомотивного светофора на более запрещающий СКРМ на модуль визуализации 3 выдает сообщение с предупреждением о смене сигнала и проверке готовности машиниста снизить скорость движения.
В случае смены сигнала локомотивного светофора на «КЖ» или «К» на модуль визуализации 3 выводится сообщение с требованием подтвердить готовность машиниста путем нажатия клавиши, выбранной СКРМ случайным образом. Если отклика на запрос не последовало или отклик оказался ошибочным, СКРМ дает команду на экстренное торможение.
Для остальных сигналов АЛСН при отсутствии правильного отклика машиниста на запрос СКРМ автоматически осуществляет служебное торможение. Проверка готовности машиниста осуществляется на определенных опасных участках пути, координаты и описания которых хранятся в базе данных и отображаются на электронной карте модуля визуализации 3.
При подтверждении готовности машинистом СКРМ продолжает контролировать выполнение управляющих операций, а в случае их невыполнения в заданный период времени автоматически осуществляет служебное или экстренное торможение.
5) Проверка готовности машиниста при отсутствии сигнала с напольной аппаратуры.
При отсутствии сигнала с напольной аппаратуры АЛСН (кодового напольного датчика) на кодируемом участке пути, уточняющего координаты местонахождения локомотива, на модуль визуализации 3 выдается сообщение с предупреждением и проводится проверка готовности машиниста к соответствующим управляющим действиям. При ошибочном отклике или отсутствии отклика от машиниста срабатывают световая индикация и звуковая сигнализация.
6) Проверка готовности при отклонениях от известной траектории торможения.
При отклонении траектории торможения от известной (например, при неправильной смазке рельсов) на модуль визуализации 3 выдается сообщение с предупреждением и проводится проверка готовности машиниста путем нажатия клавиши, выбранной СКРМ случайным образом. Если отклика на запрос не последовало или отклик оказался ошибочным, СКРМ автоматически осуществляет экстренное торможение.
7) Проверка готовности при неполадках в электронной карте.
При сбоях и зависаниях электронной карты на модуль визуализации системы управления локомотивом выдается сообщение с предупреждением о ее перезагрузке и проводится проверка готовности машиниста к управляющим действиям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2017 |
|
RU2667035C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| СПОСОБ ОРГАНИЗАЦИИ ВИЗУАЛЬНОЙ СПРАВОЧНО-ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ МАШИНИСТА ПОЕЗДА | 2010 |
|
RU2494905C2 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2756140C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510346C1 |
| ТРЕНАЖЕР ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ МАШИНИСТОВ ЛОКОМОТИВОВ И ОБСЛУЖИВАЮЩЕГО ПЕРСОНАЛА | 2015 |
|
RU2596042C1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |

Изобретение относится к области контроля состояния машиниста поезда. Способ контроля работоспособности машиниста поезда включает определение текущего значения физиологических параметров машиниста, ввод текущей информации об условиях движения поезда, подачу машинисту требующей ответа команды и определение соответствия состояния машиниста критериям работоспособности при смысловом соответствии команды и ответа. Также используют базу данных координат и описаний потенциально опасных участков пути маршрутов следования поезда с присвоением опасным участкам кодов. Координаты и коды опасных участков отображают на электронной карте, при этом соответствие состояния машиниста критериям работоспособности определяют при смысловом соответствии команды и ответа, при безошибочном наборе машинистом кода текущего опасного участка пути. Далее передают информацию о работоспособности машиниста в автоматическую систему управления поездом. Решение направлено на повышение безопасности движения. 5 ил.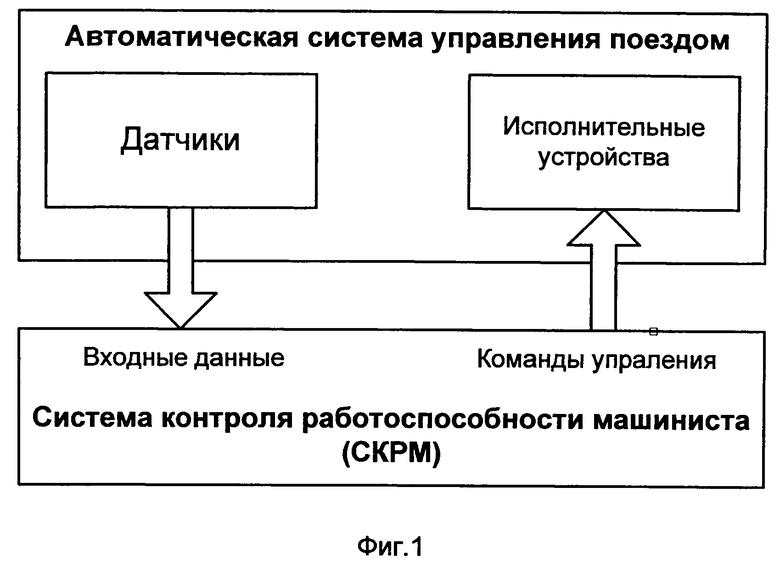
Способ контроля работоспособности машиниста поезда, включающий определение текущего значения физиологических параметров машиниста, ввод текущей информации об условиях движения поезда, подачу машинисту, по меньшей мере, одной случайным образом выбранной команды, требующей ответа, и определение соответствия состояния машиниста критериям работоспособности при смысловом соответствии команды и ответа, отличающийся тем, что используют базу данных координат и описаний потенциально опасных участков пути маршрутов следования поезда с присвоением опасным участкам случайным образом кодов, координаты и коды опасных участков отображают на электронной карте модуля визуализации, при этом соответствие состояния машиниста критериям работоспособности определяют при смысловом соответствии команды и ответа, заключающемся в безошибочном наборе машинистом кода текущего опасного участка пути, активизированного на модуле индикации, и передают информацию о работоспособности машиниста в автоматическую систему управления поездом.
| СПОСОБ ПОДДЕРЖАНИЯ РАБОТОСПОСОБНОСТИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2111134C1 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ВЫСОКОСКОРОСТНОГО ПОЕЗДА | 2003 |
|
RU2238208C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2010 |
|
RU2429152C1 |

