Изобретение относится к области железнодорожного транспорта и может быть использовано в локомотивных устройствах управления движением и обеспечения безопасности движения поездов.
Известно устройство для управления гребнесмазывателями колес, размещенное на локомотиве и содержащее микропроцессорный блок управления, имеющий в памяти электронную карту маршрута и соединенные с ним приемник спутниковой навигационной системы и бортовой измеритель скорости. Известное устройство обеспечивает включение и выключение подачи смазки в зависимости от координаты местонахождения локомотива на участках рельсового пути, отмеченных для производства смазки в электронной карте маршрута движения, и регулирует интенсивность подачи смазки в зависимости от скорости движения локомотива (DE 19632958, В61К 3/02, 29.01.98).
Известное устройство обеспечивает повышение ресурса колес подвижного состава и рельсов. Однако его работа не скоординирована с работой локомотивного устройства обеспечения безопасности движения, например устройства автоматической локомотивной сигнализации с автостопом, что не исключает случаев подачи смазки во время, подготовки и осуществления торможения поезда, что снижает безопасность движения поездов. Другим недостатком известного устройства является недостаточная оптимизация количества используемой смазки по условиям движения поезда и условиям оборудования гребнесмазывателями следующих за ним поездов. Например, при хорошо смазанных рельсах желательно уменьшить количество подаваемой смазки, а если локомотивы поездов (непосредственно следующие за данным) не оборудованы гребнесмазывателями, то следует увеличить количество подаваемой смазки.
В качестве прототипа принята система управления и обеспечения безопасности движения тягового подвижного состава, включающая подсистемы автоведения поезда, автоматического управления служебным торможением и контроля безопасности движения, а также отдельные функциональные блоки, включающие блок датчиков пути и скорости движения, приемные устройства автоматической локомотивной сигнализации и спутниковой навигационной системы, устройство выявления неисправностей оборудования локомотива, систему датчиков давления в основных агрегатах пневматической тормозной системы локомотива, бортовые приемопередающие устройства радиосвязи, устройство контроля бодрствования машиниста, устройство визуализации информации машинисту и устройство регистрации информации с энергонезависимой памятью, причем подсистемы и функциональные блоки соединены общесистемным CAN интерфейсом, а каждая подсистема снабжена электронной базой данных собственных пороговых значений допускаемой скорости по координате движения поезда (RU 2355596, B61L 3/00, 20.05.09).
Недостатком известной системы является пониженная безопасность, обусловленная отсутствием координации ее работы с управлением размещенными на локомотиве гребнесмазывателями, что приводит к случаям подачи смазки во время, когда происходит подготовка и осуществление торможения поезда. Например, за время 6 с от снятия напряжения с ЭПК (в подсистеме контроля безопасности движения) до начала экстренного торможения при скорости поезда 110 км/ч, будут смазаны рельсы и соответственно колеса поезда еще на протяжении 180 м пути. Это может резко увеличить тормозной путь поезда. Еще больший тормозной путь может возрасти при продолжении работы гребнесмазывателей (во время не подтверждения бдительности машинистом). Все это приводит к снижению безопасности движения поездов.
Технический результат изобретения заключается в повышении безопасности движения тягового подвижного состава за счет устранения запаздывания в отключении подачи смазки при необходимости торможения поезда, и точности дозирования и осуществления смазки в необходимых местах рельсового пути.
Технический результат изобретения достигается тем, что в систему управления и обеспечения безопасности движения тягового подвижного состава, включающую подсистемы контроля безопасности движения, автоматического управления служебным торможением и автоведения, а также отдельные функциональные блоки, включающие бортовые приемопередающие устройства радиосвязи, приемные устройства автоматической локомотивной сигнализации и спутниковой навигационной системы, блок датчиков пути и скорости движения, устройство выявления неисправностей оборудования локомотива, датчики давления в основных агрегатах пневматической тормозной системы локомотива, блок контроля бодрствования машиниста, включающий узел физиологического контроля машиниста и узел регистрации управляющих действий машиниста, интерактивное устройство отображения информации, устройство безопасного ручного ввода ответственной информации, устройство регистрации информации с энергонезависимой памятью, причем подсистемы и функциональные блоки соединены общесистемным CAN-интерфейсом, а каждая подсистема связана с электронной картой маршрута следования и электронной базой данных, согласно изобретению введены блок управления гребнесмазывателями колес локомотива, подключенный к CAN-интерфейсу и связанный отдельным входом через канал цифровой связи с выходом блока обработки виброакустических сигналов, излучаемых в процессе движения поезда в местах механического взаимодействия колес локомотива с рельсами, при этом в электронную карту маршрута следования введены координаты участков рельсового пути, подлежащих смазке, а в электронную базу данных подсистем контроля безопасности движения, автоматического управления служебным торможением и автоведения введены соответствующие этим участкам пути данные для выбора режимов управления гребнесмазывателями колес локомотива, при заданных наборах сочетаний режимов движения тягового подвижного состава и ожидаемых амплитудно-частотных и амплитудно-временных характеристик, обрабатываемых виброакустических сигналов.
В системе управления и обеспечения безопасности движения тягового подвижного состава блок обработки виброакустических сигналов состоит из блока датчиков виброакустических сигналов, соединенного через блок усилителей с входом блока аналого-цифровых преобразователей, выход которого соединен с выходом блока обработки виброакустических сигналов.
На чертеже приведена структурная схема системы управления и обеспечения безопасности движения тягового подвижного состава.
Система управления и обеспечения безопасности движения тягового подвижного состава содержит подсистемы контроля безопасности движения, автоматического управления служебным торможением и автоведения (соответственно 1, 2 и 3), а также отдельные функциональные блоки, включающие бортовые приемопередающие устройства 4 радиосвязи, приемные устройства 5 автоматической локомотивной сигнализации и спутниковой навигационной системы 6, блок 7 датчиков пути и скорости движения, устройство 8 выявления неисправностей оборудования локомотива, датчики 9 давления в основных агрегатах пневматической тормозной системы локомотива, блок 10 контроля бодрствования машиниста, включающий узел 11 физиологического контроля машиниста и узел 12 регистрации управляющих действий машиниста, интерактивное устройство 13 отображения информации, устройство 14 безопасного ручного ввода ответственной информации, устройство 15 регистрации информации с энергонезависимой памятью, подсистемы (1, 2 и 3) и функциональные блоки (4-15) соединены общесистемным CAN-интерфейсом, а каждая подсистема (1, 2 и 3) снабжена электронной картой маршрута следования и электронной базой данных (не показаны), включающих, среди прочих данных, пороговые значения допускаемой скорости по координате движения (электронная карта маршрута следования и электронная база данных могут быть также и общими для всех подсистем), блок 16 управления гребнесмазывателями колес локомотива подключен к CAN-интерфейсу и связан отдельным входом через канал 17 цифровой связи с выходом блока 18 обработки виброакустических сигналов, излучаемых в процессе движения поезда в местах механического взаимодействия колес локомотива с рельсами, в электронную карту маршрута следования введены координаты участков рельсового пути, подлежащих смазке, а в электронную базу данных подсистем контроля безопасности движения, автоматического управления служебным торможением и автоведения введены соответствующие этим участкам пути данные для выбора режимов управления гребнесмазывателями колес локомотива, при заданных наборах сочетаний режимов движения тягового подвижного состава и ожидаемых амплитудно-частотных и амплитудно-временных характеристик, обрабатываемых виброакустических сигналов. Блок 18 обработки виброакустических сигналов состоит из блока 19 датчиков виброакустических сигналов, соединенного через блок 20 усилителей с входом блока 21 аналого-цифровых преобразователей, выход которого соединен с выходом блока обработки виброакустических сигналов.
Система управления и обеспечения безопасности движения тягового подвижного состава работает следующим образом.
В процессе движения поезда в общесистемный CAN-интерфейс непрерывно поступают данные от блока 7 датчиков пути и скорости движения. При поступлении этих данных в подсистемах (1, 2 и 3) контроля безопасности движения, автоматического управления служебным торможением и автоведения определяется фактическая скорость движения, а также путь, пройденный с момента начала движения. На основании этого производится координатная привязка к электронной карте маршрута, и совместно с приемными устройствами 6 спутниковой навигационной системы определяется текущая координата локомотива. В систему также непрерывно поступают данные от приемных устройств 5 автоматической локомотивной сигнализации, устройства 8 выявления неисправностей оборудования локомотива, датчиков 9 давления в основных агрегатах пневматической тормозной системы локомотива и блока 10 контроля бодрствования машиниста. На основании этих данных выбирается режим управления поездом и, в частности, определяются режимы его торможения.
Алгоритмы работы подсистем согласованы в соответствии с приоритетом, формируемых ими команд управления. Наивысший приоритет по командам управления, связанным с торможением, имеет подсистема 1, затем следует приоритет подсистемы 2 и затем подсистемы 3.
Блок 16 управления гребнесмазывателями колес локомотива связан с блоком 18 обработки виброакустических сигналов каналом 17 цифровой связи (проводным или радио), поскольку устройства, входящие в блок 18, удалены от остальных устройств системы и расположены в местах, близких к местам взаимодействия между колесами и рельсами. Блок 19 датчиков виброакустических сигналов воспринимает виброакустические сигналы, излучаемые в местах взаимодействия колес и рельсов, с помощью пьезоакселерометрических и/или аналогичных типов датчиков. Эти сигналы фильтруются, усиливаются и масштабируются блоком 20 усилителей, и преобразуются в цифровую форму в блоке 21 аналого-цифровых преобразователей. От блока 21 по каналу 17 цифровой связи цифровые сигналы поступают в блок 16 управления гребнесмазывателями колес локомотива и далее по CAN-интерфейсу поступают в другие блоки системы для совместной с ними выработки команд управления гребнесмазывателями. Управление гребнесмазывателями в предлагаемой системе осуществляется с помощью подсистем (1, 2 и 3), которые вырабатывают команды, изменяющие количество подаваемой смазки или запрещающие ее подачу в зависимости от режимов торможения и с учетом информации, поступающей через бортовые приемопередающие устройства 4 радиосвязи из центра диспетчерского управления о поездной ситуации позади данного поезда.
Блок 16 производит обработку виброакустических сигналов в реальном времени. В процессе обработки он осуществляет проверку степени совпадения реальных характеристик этих сигналов с ожидаемыми (образцовыми) амплитудно-частотными и амплитудно-временными характеристиками, хранящимися в электронной базе данных системы. На основе классификации полученных результатов и учета данных, полученных от подсистем (1, 2 и 3), блок 16 управления формирует команды управления гребнесмазывателями.
Условия взаимодействия в системе "колесо-рельс" оказывают существенное влияние на сроки службы и организацию содержания основных устройств пути и подвижного состава, на эксплуатационные затраты железных дорог. Лубрикация зон контакта гребня колеса с боковой поверхностью головки рельса позволяет снизить вероятность усталостных дефектов, износ в кривых, увеличивает возможности в повышении веса грузовых поездов, скоростей пассажирских поездов, погонных и осевых нагрузок, предупреждает сход вагонов и повышает ресурс гребней колес и рельсов. За счет уменьшения сил сопротивления движению по рельсам лубрикация снижает расход топливно-энергических ресурсов на тягу, повышает ресурс колес и рельсов, снижает вероятность вкатывания колеса на головку рельса, улучшает экологические показатели, и делает работу железной дороги менее шумной.
Технические средства и смазочные материалы для лубрикации в составе движущихся поездов не требуют выделения на работы по лубрикации отдельных ниток в графиках движения поездов. Система управления гребнесмазывателями, размещенными на локомотиве, использует каналы связи с центром диспетчерского управления движением поездов, что создает дополнительные возможности для повышения безопасности движения поездов и улучшения содержания рельсового пути и колес подвижного состава. Каждая подсистема управления движением поезда имеет наряду со своим приоритетом в выборе скорости движения и соответствующий приоритет в управлении гребнесмазывателями. Например, система автоведения, имеющая низший приоритет в выборе скорости движения, также имеет низший приоритет в управлении работой гребнесмазывателей. В частности, она не может отменить смазку участков пути, на которых принимаемые виброакустические сигналы свидетельствуют о высокой степени износа рельсов. Так как в данном случае энергетически оптимальная скорость движения данного поезда, достигаемая служебным торможением, менее важна, чем снижение износа колес и пути данного и следующих за ним поездов. Однако при меньших уровнях виброакустических сигналов отключение смазки для оптимизации энергетических характеристик движения может быть разрешено. В тоже самое время система автоматического управления служебным торможением для предупреждения проезда светофора с красным сигнальным показанием (в зависимости от остающегося расстояния) может уменьшить количество подаваемой смазки, или даже отменить ее подачу вообще, а подсистема контроля безопасности движения при снятии напряжения на ЭПК вообще отключает подачу смазки безотносительно к уровню принимаемых виброакустических сигналов.
Участками пути, на которых используется большее количество смазки, являются участки, испытывающие повышенные нагрузки (например, криволинейные) и/или участки, имеющие повышенный износ рельсов, определяемый в данном устройстве по характеристикам принимаемых виброакустических сигналов.
Кроме этого при следовании непосредственно за данным поездом поездов, не оборудованных гребнесмазывателями, по сигналу с поста диспетчерского управления, принимаемого бортовым приемопередающим устройством 4 радиосвязи, может быть увеличена норма подачи смазки для улучшения условия взаимодействия рельс-путь для этих поездов. Также эта норма может быть уменьшена в дождливую погоду, когда вода выполняет функцию смазки или же в случаях, когда остающееся количество смазки недостаточно для работы гребнесмазывателей до конца маршрута. Если какой-то участок пути, требующий смазки и имеющий высокий уровень генерируемых виброакустических сигналов, не получил достаточную смазку из-за отключения гребнесмазывателя одной из подсистем управления движением тягового подвижного состава, с локомотива на пост диспетчерского управления передается информация о недостаточной смазки рельсового пути в этих местах для учета этой информации при обслуживании пути и организации движения для последующих поездов.
В электронную карту маршрута следования введены координаты участков рельсового пути, подлежащих смазке, а в электронную базу данных подсистем (1, 2 и 3) контроля безопасности движения, автоматического управления служебным торможением и автоведения введены соответствующие этим отрезкам пути данные для выбора режимов управления гребнесмазывателями колес локомотива, при заданных наборах сочетаний режимов движения тягового подвижного состава и ожидаемых амплитудно-частотных и амплитудно-временных характеристик обрабатываемых виброакустических сигналов.
В местах недостаточной смазки наблюдается явление возникновения резкого высокочастотного шума «визга», который излучается при взаимодействии колес подвижного состава с рельсами. Этот шум имеет специфические частотно-временные характеристики для каждой определенной скорости и других физических переменных условий, характеризующих условия взаимодействий типа колесо-рельс при движении поезда, и используется в системе для уточнения количества и мест подачи смазки. «Визг» возникает в результате вибраций, причиной которых служит трение между двумя контактирующими взаимно перемещающимися стальными поверхностями колеса и рельса. Это явление особенно заметно при движении поездов в кривых, когда гребень наружного колеса под воздействием поперечных усилий интенсивно взаимодействует с внутренней гранью наружного рельса, имея некоторое проскальзывание относительно последней. Значительная часть высокочастотного шума происходит от трения при контакте поверхностей катания обода колеса и головки рельса, сопровождающемся эффектом заедания. «Визг» особенно характерен для подвижного состава, оснащенного тележками, не имеющими возможности радиальной установки колесных пар при прохождении кривых. Основной причиной «визга» в кривых является зависящая от радиуса кривой разница в длине зон контакта колес с рельсами (на внутреннем рельсе длина меньше, чем на наружном). Эта разность компенсируется относительными перемещениями практически жестко закрепленных внутреннего и наружного колес (они катятся по внутреннему и скользят по наружному рельсу). И в том и в другом случае возникает интенсивное шумоизлучение. К поперечному скольжению, являющемуся основным источником шума, добавляется продольное движение колеса.
С помощью лубрикаторов, установленных на локомотивах (чаще всего смазочный материал в таких лубрикаторах применяется в виде твердых стержней или высоковязкого геля), смазка наносится на гребни и/или поверхность катания колес, откуда она переносится на рельсы. Количество требуемой смазки, в частности, зависит от радиуса кривых, крутизны уклонов, а также от скорости и массы поезда, определяющих погонные и осевые нагрузки вагонов и локомотивов.
Появление «визга» определенной интенсивности (например, при вхождении передних колес локомотива в кривую участка пути, имеющего не достаточный уровень смазки) является моментом, относительно которого отсчитывается прохождение локомотивом отрезка пути, после которого должны включаться гребнесмазыватели, если только это не препятствует торможению поезда.
Базы данных и статистика распределения значений параметров, влияющих на виброакустические шумы, создаются путем анализа параметров взаимодействий колесо-рельс, для записи которых в предлагаемой системе используется узел 12 регистрации управляющих действий машиниста по ведению поезда. Это делается для каждого конкретного локомотива и каждого маршрута его следования. Акустические портреты возможных ситуаций, записанные в процессе движения, затем переносятся для хранения в архиве центра диспетчерского управления и мониторинга. Они постоянно дополняются и обновляются для занесения в электронную память устройств конкретных локомотивов перед каждой поездкой в увязке с данными о весе и длине поезда и его погонных и осевых нагрузках.
Избыточное количество смазки тоже вредно для поездов, следующих за данным, так как мешает устойчиво поддерживать требуемую силу тяги локомотивов без срывов на боксование и юз. Срывы на боксование, возможные при наборе скорости, приводят к повышенному износу и механическим повреждениям колес и рельсов и угону пути. Срывы в юз при торможении приводят к термомеханическим повреждениям колес и рельсов. Нормирование интенсивности эмиссии виброакустических сигналов позволяет экономнее расходовать материалы для лубрикации и позволяет сократить протяженность участков с избыточной и/или недостаточной смазкой.
Совместное использование данных о плане и профиле пути по маршруту движения, данных от устройств определения скорости движения и определения текущей координаты, а также использование устройства регистрации как подсистемами (1, 2, 3) управления торможением, так и блоком 16 управления гребнесмазывателями, позволяет существенно упростить сам блок управления гребнесмазывателями. Использование узла 12 регистрации управляющих действий машиниста позволяет осуществлять накопление информации для формирования баз данных для блока 16 управления гребнесмазывателями и для решения задач прогнозирования появления при эксплуатации опасных участков пути и ненадежных ходовых частей локомотива.
Предлагаемая система повышает безопасность движения как за счет устранения запаздывания в отключении подачи смазки при необходимости торможения локомотива, так и за счет более точного дозирования и осуществления смазки в необходимых местах рельсового пути, смазки вагонных колес и бандажей локомотивов с учетом потребностей данного и следующих за ним поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510346C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446071C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446070C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2015 |
|
RU2591551C1 |
| СПОСОБ ОРГАНИЗАЦИИ ВИЗУАЛЬНОЙ СПРАВОЧНО-ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ МАШИНИСТА ПОЕЗДА | 2010 |
|
RU2494905C2 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
Изобретение относится к области железнодорожного транспорта и может быть использовано в локомотивных устройствах управления движением и обеспечения безопасности движения поездов. Система содержит подсистемы контроля безопасности движения, автоматического управления служебным торможением и автоведения, а также отдельные функциональные блоки, включающие бортовые приемопередающие устройства радиосвязи, приемные устройства автоматической локомотивной сигнализации и спутниковой навигационной системы, блок датчиков пути и скорости движения, устройство выявления неисправностей оборудования локомотива, датчики давления в основных агрегатах пневматической тормозной системы локомотива, блок контроля бодрствования машиниста, интерактивное устройство отображения информации, устройство безопасного ручного ввода ответственной информации, устройство регистрации информации с энергонезависимой памятью. Подсистемы и функциональные блоки соединены общесистемным CAN- интерфейсом. Каждая подсистема снабжена электронной картой маршрута следования и электронной базой данных, включающих, среди прочих данных, пороговые значения допускаемой скорости по координате движения. Блок управления гребнесмазывателями колес локомотива подключен к CAN-интерфейсу и связан отдельным входом через канал цифровой связи с выходом блока обработки виброакустических сигналов, излучаемых в местах механического взаимодействия колес локомотива с рельсами. В электронную карту маршрута следования введены координаты участков рельсового пути, подлежащих смазке. В электронную базу данных подсистем контроля безопасности движения, автоматического управления служебным торможением и автоведения введены соответствующие этим участкам пути данные для выбора режимов управления гребнесмазывателями колес локомотива, при заданных наборах сочетаний режимов движения тягового подвижного состава и ожидаемых амплитудно-частотных и амплитудно-временных характеристик, обрабатываемых виброакустических сигналов. Достигается повышение безопасности движения тягового подвижного состава. 1 з.п. ф-лы, 1 ил.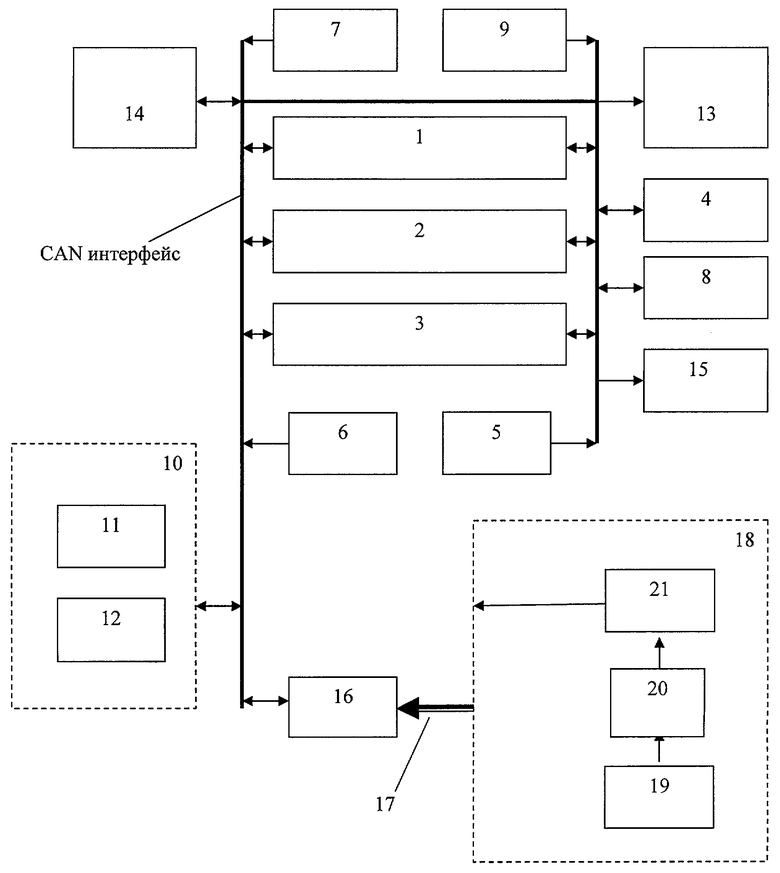
1. Система управления и обеспечения безопасности движения тягового подвижного состава, включающая подсистемы контроля безопасности движения, автоматического управления служебным торможением и автоведения, а также отдельные функциональные блоки, включающие бортовые приемопередающие устройства радиосвязи, приемные устройства автоматической локомотивной сигнализации и спутниковой навигационной системы, блок датчиков пути и скорости движения, устройство выявления неисправностей оборудования локомотива, датчики давления в основных агрегатах пневматической тормозной системы локомотива, блок контроля бодрствования машиниста, включающий узел физиологического контроля машиниста и узел регистрации управляющих действий машиниста, интерактивное устройство отображения информации, устройство безопасного ручного ввода ответственной информации, устройство регистрации информации с энергонезависимой памятью, причем подсистемы и функциональные блоки соединены общесистемным CAN- интерфейсом, а каждая подсистема связана с электронной картой маршрута следования и электронной базой данных, отличающаяся тем, что в нее введены блок управления гребнесмазывателями колес локомотива, подключенный к CAN-интерфейсу и связанный отдельным входом через канал цифровой связи с выходом блока обработки виброаккустических сигналов, излучаемых в процессе движения поезда в местах механического взаимодействия колес локомотива с рельсами, при этом в электронную карту маршрута следования введены координаты участков рельсового пути, подлежащих смазке, а в электронную базу данных подсистем контроля безопасности движения, автоматического управления служебным торможением и автоведения введены соответствующие этим участкам пути данные для выбора режимов управления гребнесмазывателями колес локомотива, при заданных наборах сочетаний режимов движения тягового подвижного состава и ожидаемых амплитудно-частотных и амплитудно-временных характеристик, обрабатываемых виброаккустических сигналов.
2. Система управления и обеспечения безопасности движения тягового подвижного состава по п.1, отличающаяся тем, что блок обработки виброаккустических сигналов состоит из блока датчиков виброакустических сигналов, соединенного через блок усилителей с входом блока аналого-цифровых преобразователей, выход которого соединен с выходом блока обработки виброаккустических сигналов.
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| 1972 |
|
SU410431A1 | |
| Передвижной электрифицированный посадочный знак | 1949 |
|
SU83988A1 |
| АВТОМАТИЧЕСКИЙ ЛУБРИКАТОР | 1993 |
|
RU2082639C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВОМ ДЛЯ НАНЕСЕНИЯ СМАЗКИ НА РЕЛЬСЫ | 2006 |
|
RU2309075C1 |
| US 6578669 В2, 17.06.2003. | |||

