Изобретение относится к области судостроения - автоматическому отказобезопасному управлению движением корабля.
Известен способ автоматического управления движением судна по заданному путевому углу, реализованный в «Системе автоматического управления движением судна» (RU 2248914 C1, 27.03.2005). Способ управления движением судна основан на использовании информации от датчика путевого угла, задатчика путевого угла и сумматора, в котором по сигналам текущего путевого угла, заданного путевого угла, угловой скорости судна формируют результирующий сигнал для управления рулевым приводом судна.
Известен также способ автоматического управления движением корабля с использованием динамической модели углового движения корабля (RU №2223197 C1, 10.02.2004, принятый нами в качестве прототипа). Аппаратура автоматического управления движением судна, содержит задатчик курсового угла, датчик угла перекладки руля, приемник спутниковой навигационной системы, рулевой привод, дифференциатор и сумматор, первый вход которого соединен с выходом задатчика путевого угла, выход приемника СНС соединен с вторым входом сумматора, к третьему входу которого подключен выход датчика угла перекладки руля, выход сумматора соединен с входом рулевого привода, четвертый вход сумматора соединен с выходом динамической модели углового движения судна-фильтра. На выходе динамической модели движения судна-фильтра формируется оценка угла курса. Сигнал оценки угла курса алгебраически суммируется с сигналом угла курса, получаемого с выхода приемника СНС. Разность этих сигналов вводится на вход динамической модели движения судна-фильтра.
Таким образом, в широко распространенном способе управления формируют следующие сигналы для обеспечения автоматического управления движением судна.
В задатчике курсового угла формируют сигнал - ϕзд=f(t), который вводят на вход сумматора, на второй вход которого поступает сигнал оценки угла курса - 



где 
δзд - сигнал заданного угла перекладки руля (с выхода сумматора вводят на вход рулевого привода).
Недостатками известных способов управления движением являются:
- отсутствие встроенного контроля исправности источников информации,
- выход из строя датчиков состояния корабля приводит к аварийным ситуациям,
- выход из строя вычислительных сетей фильтра обработки входной информации также приводит к аварийным ситуациям.
Техническим результатом предлагаемого способа управления движением судна является:
- повышение точности и надежности системы управления движением,
- введение блока диагностики и коммутации позволило осуществлять контроль исправности системы управления и перестройки архитектуры системы автоматического управления движением (САУД), что позволило осуществить построение отказоустойчивой системы управления,
- введение 2х резервных датчиков глубины, двух измерителей угла дифферента и четырех фильтров позволило обеспечить сохранение нормальной работы САУД не только при сбоях в датчиках, но и в вычислительных сетях фильтров обработки входной информации.
Технический результат в предлагаемом способе управления достигается благодаря:
- формированию сигнала среднего значения оценок глубины 
1) по трем сигналам глубины с трех датчиков глубины (при отсутствии сбоев во всех трех датчиках глубины);
2) по двум сигналам глубины с двух исправных датчиков глубины (третий любой вышел из строя),
3) одному сигналу от исправного датчика глубины,
- формированию сигнала среднего значения оценки угла дифферента - 
1) по трем сигналам угла дифферента с датчика угла дифферента и двух измерителей угла дифферента (при отсутствии сбоев во всех каналах глубины и угла дифферента);
2) по двум сигналам угла дифферента с двух исправных каналов угла дифферента (третий - вышел из строя, любой, в том числе и из-за выхода из строя датчика глубины),
3) одному сигналу от исправного канала угла дифферента (при исправных датчиках глубины);
- формированию сигнала среднего значения оценок глубины -
1) по сигналам с трех фильтров (при исправности первого, второго и третьего фильтра,
2) по сигналам с двух исправных фильтров из трех (и исправного датчика глубины),
3) по сигналу с одного исправного фильтра из трех (и исправных датчиках глубины),
- формированию сигнала среднего значения угла дифферента 
1) по сигналам с трех фильтров (при исправности четвертого, пятого и шестого фильтра),
2) по сигналам с двух исправных фильтров (при неисправном четвертом, или пятом, или шестом фильтре),
- своевременному выявлению сбоя в системе управления и изменению архитектуры САУД, позволяющему сохранить высококачественное автоматическое управление движением корабля по глубине.
Способ отказоустойчивого управления движением корабля по глубине
Способ управления движением корабля по глубине с использованием датчика руля, первого датчика глубины, датчика угла дифферента, датчика угловой скорости, рулевого привода, задатчика глубины, первого фильтра оценки сигнала глубины, четвертого фильтра оценки сигнала угла дифферента и сумматора, на вход которого вводят сигналы:
- угла перекладки руля - δ (с датчика руля),
- угловой скорости - ω (с датчика угловой скорости),
- заданной глубины корабля- hзд (с задатчика глубины).
На вход первого фильтра оценки сигнала глубины вводят сигналы:
- угла перекладки руля δ (с датчика руля),
- глубины h1 (с первого датчика глубины),
- оценки глубины 
На вход четвертого фильтра оценки сигнала угла дифферента вводят сигналы:
- угла дифферента ψ (с выхода датчика угла дифферента),
- угла перекладки руля δ (с датчика руля).
Сигнал заданной скорости перекладки руля - dδзд/dt (с выхода сумматора) вводят на вход рулевого привода.
Используют также второй датчик глубины, третий датчик глубины, второй фильтр оценки сигнала глубины, третий фильтр оценки сигнала глубины, пятый фильтр оценки сигнала угла дифферента, шестой фильтр оценки сигнала угла дифферента, блок диагностики и коммутации, на вход которого вводят сигналы:
- оценки глубины -
- оценки глубины - 
- оценки глубины - 
- оценки угла дифферента - 
- оценки угла дифферента - 
- оценки угла дифферента - 
В блоке диагностики и коммутации формируют сигналы шести модулей разности:










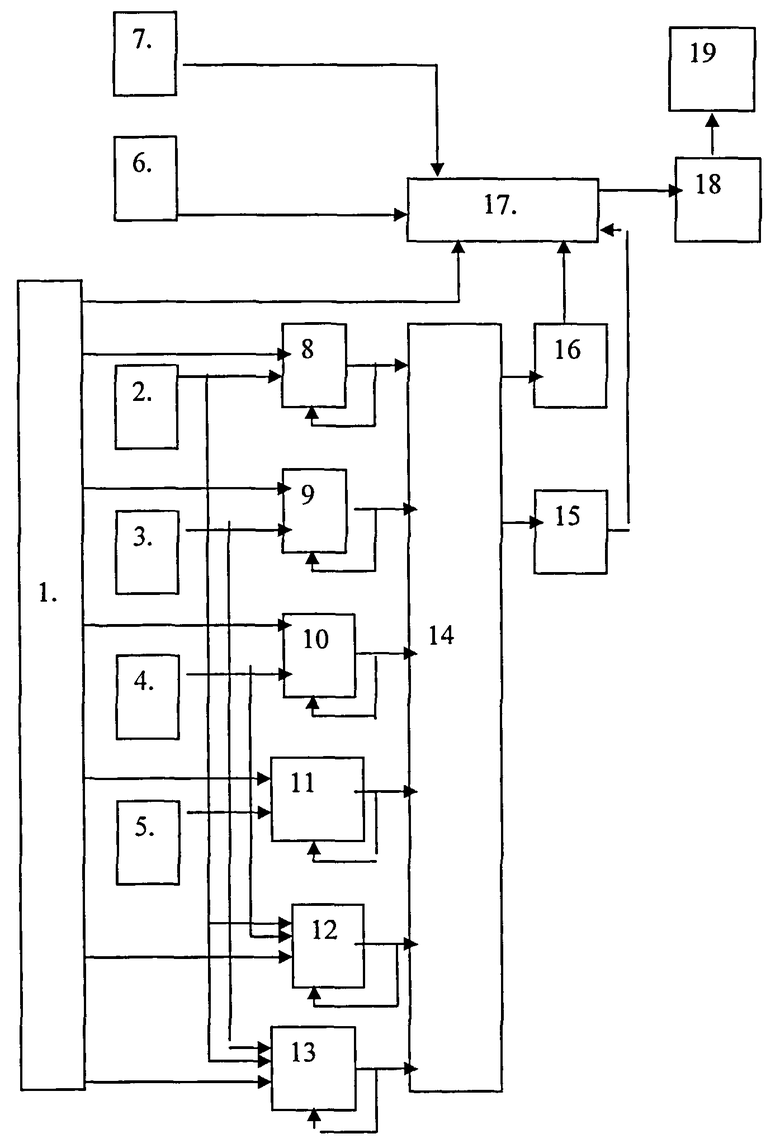
Система отказоустойчивого управления движением корабля (см. чертеж).
На чертеже приведена блок-схема системы отказоустойчивого управления движением корабля, которая реализована в соответствии предложенным способом управления.
Система содержит
1 - датчик руля, 2 - первый датчик глубины, 3 - второй датчик глубины, 4 - третий датчик глубины, 5 - датчик угла дифферента, 6 - датчик угловой скорости, 7 - задатчик глубины, 8-13 - первый-шестой фильтры, 14 - блок диагностики и коммутации, 15 - блок среднего значения глубины, 16 - блок среднего значения угла дифферента, 17 - сумматор, 18 - рулевой привод, 19 - корабль.
Реализация рассматриваемой системы возможна:
- с применением аналоговых счетно-решающих элементов,
- с использованием цифровой техники,
- датчики следует применить серийно выпускаемые нашей промышленностью,
- фильтры могут базироваться на электронной модели движения корабля с постоянными коэффициентами, также может быть использована адаптивная модель движения корабля.
Особенности работы системы отказоустойчивого управления движением корабля
а. Формирование оценок измеряемой информации - 

1-ю оценку сигнала текущей глубины корабля - 
δ - угол перекладки руля (с датчика руля - 1),
h1 - измеренное значение глубины (с первого датчика глубины - 2),



δ - (с датчика руля - 1),
h2 - измеренного значения глубины(с второго датчика глубины - 3),

с выхода второго фильтра сигнал - 

δ - (с датчика руля - 1),
h3 - измеренного значения глубины (с третьего датчика глубины - 4),


Первую оценку текущего угла дифферента 
δ - угол перекладки руля (с датчика руля - 1)
ψ - измеренного угла дифферента (с датчика угла дифферента - 5),

Вторую оценку текущего угла дифферента - 
δ - угол перекладки руля (с датчика руля - 1),
h1 - (с первого датчика глубины - 2),
h3 - (с третьего датчика глубины - 4),


Третью оценку текущего угла дифферента 
δ - угол перекладки руля (с датчика руля - 1),
h1 - (с первого датчика глубины - 2),
h2 - (с второго датчика глубины - 3),


б. Диагностирование сбоя в трех каналах выработки оценок - 

В блоке 14 формируют величину разности измеренных сигналов - hi, ψi и
их оценок - 

Если модуль разности меньше допустимого значения, то следует, что данный «i» канал формирования «i» оценки измеряемой информации - 


Используют только эти «хорошие» каналы сигналов оценок, которые удовлетворяют условию (2) Из блока диагностики - 14 «хорошие» сигналы, соответственно, вводят в блок среднего значения оценки глубины - 15 и блок среднего значения оценки угла дифферента - 16. В блоке 15 формируют среднее значение -




в. Управление движением корабля
Боцман задатчиком глубины - 7 устанавливает требуемую глубину плавания корабля hзд, при этом в рассматриваемой системе формируется закон автоматического управления рулевым приводом - 18, который отклоняет руль и выводит корабль на заданную глубину. Рассмотрим операции, которые при этом выполняются в системе.
На вход сумматора 17 поступают сигналы:
- заданной глубины - hзд (с задатчика глубины - 7),
- угловой скорости- ω (с датчика угловой скорости - 6),
- угла перекладки руля - δ (с датчика руля - 1),
- среднее значение оценок угла дифферента -
- среднее значение оценок глубин -
В сумматоре - 17 формируется закон управления рулевым приводом - 18 для обеспечения движения корабля на заданной глубине - hзд

Сигнал - dδ/dtзд с выхода сумматора - 17 вводится на вход рулевого привода - 18, при этом в соответствие с законом (3) корабль будет двигаться на глубине h=h зд.
Проведенное моделирование работы рассмотренной выше системы подтвердило эффективность использования предложенного способа управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2013 |
|
RU2536011C2 |
| СИСТЕМА КОМПЛЕКСИРОВАННЫХ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ КОРАБЛЯ | 1993 |
|
RU2065197C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2305050C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| АППАРАТУРА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ ВОЛНЕНИИ | 2009 |
|
RU2392181C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УМЕРЕНИЯ КРЕНА СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 2013 |
|
RU2531999C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
Изобретение относится к области судостроения. Способ заключается в использовании задатчика глубины, первого фильтра оценки сигнала глубины, четвертого фильтра оценки сигнала угла дифферента и сумматора, на вход которого вводят сигналы. С выхода сумматора сигнал заданной скорости перекладки руля вводят на вход рулевого привода. Затем используют дополнительно установленные два резервных датчика глубины, два измерителя угла дифферента, четыре фильтра, блок диагностики и коммутации, на вход которого вводят сигналы. В блоке диагностики и коммутации формируют сигналы модуля разности: 






Способ управления движением корабля по глубине с использованием датчика руля, первого датчика глубины, датчика угла дифферента, датчика угловой скорости, рулевого привода, задатчика глубины, первого фильтра оценки сигнала глубины, четвертого фильтра оценки сигнала угла дифферента и сумматора, на вход которого вводят сигналы:
- угла перекладки руля δ (с датчика руля),
- угловой скорости ω
(с датчика угловой скорости),
- заданной глубины корабля hзд (с задатчика глубины),
на вход первого фильтра оценки сигнала глубины вводят сигналы:
- угла перекладки руля δ
(с датчика руля),
- глубины h1 (с первого датчика глубины),
- оценки глубины
на вход четвертого фильтра оценки сигнала угла дифферента вводят сигналы:
- угла дифферента ψ
(с выхода датчика угла дифферента),
- угла перекладки руля δ
(с датчика руля),
сигнал заданной скорости перекладки руля - dδзд/dt (с выхода сумматора) вводят на вход рулевого привода, отличающийся тем, что используют второй датчик глубины, третий датчик глубины, второй фильтр оценки сигнала глубины, третий фильтр оценки сигнала глубины, пятый фильтр оценки сигнала угла дифферента, шестой фильтр оценки сигнала угла дифферента, блок диагностики и коммутации, на вход которого вводят сигналы:
- оценки глубины -
- оценки глубины -
- оценки глубины -
- оценки угла дифферента -
- оценки угла дифферента -
- оценки угла дифферента -
в блоке диагностики и коммутации формируют сигналы модуля разности:


| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| СПОСОБ ОТКАЗОБЕЗОПАСНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2010 |
|
RU2432297C1 |
| Способ получения обогащенного суперфосфата | 1989 |
|
SU1724653A1 |
| US 4253149 A, 24.02.1981 | |||

