Предлагаемая аппаратура относится к области судовождения, в частности к автоматическому управлению движением корабля.
Известны системы автоматического управления движением судна фирм Аншютц и Сперри (Острецов Г.Э. Автоматизация управления движением кораблей // М. ИПУ / РАН. 2008 г.), в которых судоводитель при развитом морском волнении вводит люфт на входе регулятора для снижения загрузки рулевого привода.
Недостатком такого решения является появление статической ошибки при автоматическом управлении, при этом судоводителю необходимо быть «на страже» и своевременно вводить требуемую величину зоны нечувствительности на входе регулятора системы управления.
Известно также устройство управления движением судна (патент РФ №2238881, принятый в качестве прототипа), содержащее задатчик угла дифферента, датчик угла дифферента, датчик угловой скорости, выходы которых подключены к первому, второму и третьему входам суммирующего усилителя, выход которого соединен с входом рулевого привода. Устройство управления движением судна эффективно обеспечивает автоматическое управление корабля только при спокойном море. При развитом морском волнении несмотря на использование оценок фазовых координат судна, а не с датчиков измерений фазовых координат судна, появляются сильные перегрузки рулевого привода, что кроме снижения ресурса работы рулевого привода может привести к аварийной ситуации - заклинке руля.
Целю предлагаемого изобретения является автоматическое выяление и исключение перегрузки рулевого привода (т.е. построить безотказную систему управления движением корабля при развитое морском волнении).
Предлагаемая аппаратура позволяет в процессе рейса судна выявить появление перегрузки рулевого привода и изменить закон управления, который позволит снизить загрузку рулевого привода, незначительно снизив при этом качество стабилизации судна.
Аппаратура включает рулевой привод, датчики угла курса, угловой скорости судна и задатчик угла курса, выходы датчиков и задатчика подключены к входу сумматора. Для определения перегрузки рулевого привода и изменения закона управления в аппаратуру введен датчик угла перекладки руля, блок перегрузки, блок переключения, задатчик перегрузки и блок среднего значения угла перекладки руля с соответствующими связями (см. чертеж).
На чертеже приведена блок-схема аппаратуры, содержащая: задатчик угла курса 1, датчик угла курса 2, датчик угловой скорости 3, сумматор 4, датчик угла перекладки руля 5, блок перегрузки 6, рулевой привод 7, блок среднего значения угла перекладки руля 8, задатчик перегрузки 9, блок переключения 10, объект управления - судно 11.
Предложенная аппаратура может быть реализована на аналоговых элементах. Датчики 2, 3 и задатчики 1, 9, серийно выпускаемые преобразователи угла в напряжение с точностью 5%. Сумматор 4 и блок 8 могут быть реализованы на микросхемах типа 140 УД 8. Блок 10 - на электромагнитном реле с нормально замкнутыми и нормально разомкнутыми контактными группами. Рулевой привод - штатный корабельный.
Рассмотрим работу предложенной аппаратуры (см. чертеж).
Судоводитель устанавливает задатчиком угла курса 1 желаемое направление движения судна. В режиме спокойного моря на выходе сумматора формируется закон управления рулевым приводом:

где
 - рассогласование по углу курса,
- рассогласование по углу курса,
φзд - заданное значение угла курса,
φ - текущий угол курса,
ω - угловая скорость судна,
δзд - заданный угол перекладки руля,
Кi=1,2 - коэффициенты регулирования.
В результате судно выйдет на курс, равный заданному значению φзд. Регулярно через интервал времени Т подключается блок перегрузки 6. В случае развитого морского волнения может наступить перегрузка рулевого привода. Рассмотрим эту ситуацию. Судоводитель устанавливает в задатчике перегрузки 9 предельно допустимое значение загрузки рулевого привода δнедоп., которое поступает на вход блока перегрузки 6, на второй вход этого блока поступает угол перекладки руля δ от датчика угла перекладки руля 5. В блоке перегрузки 6 рулевого привода формируется величина перегрузки рулевого привода Δδнедоп.:

где
δнедоп. - предельно допустимая загрузка рулевого привода,
Т - время цикла высококачественного управления (1).
В течение времени Δt=KΔδнедоп. сигнал о недопустимой перегрузке поступает на вход блока переключения 10. В блоке 10 реле отключает от входа рулевого привода 7 сумматор 4 и подключает блок среднего значения угла перекладки руля 8, в котором вырабатывается среднее значение угла перекладки руля:
где δ - текущее значение угла перекладки руля.
Т - время цикла высококачественного управления (1). Таким образом в течение интервала времени Δt осуществляется облегченный закон управления рулевым приводом (привод практически неподвижен, хотя одержание заданного курса продолжается):

Через время: Т+Δt (когда реле в блоке 10 отключится) на вход рулевого привода подключится закон управления (1) вместо закона (3). Затем высококачественное управление (1) продолжится до момента времени Т+Δt+T, после этого в блоке перегрузки 6 выработается Δδнедоп.. Если величина Δδнедоп.<0, то высококачественное управление (1) продолжится до момента времени Т+Δt+Т+Т, если же величина Δδнедоп.>0, то подключится облегченный закон управления (3) на интервал времени Δt до времени T+Δt+Т+Δt и т.д.
Проведенное моделирование работы рассмотренной аппаратуры подтвердило эффективность использования предложенного устройства управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С УЧЕТОМ ВОЛНЕНИЯ | 2011 |
|
RU2499727C2 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
Изобретение относится к области судовождения, в частности, к автоматическому управлению движением корабля. Аппаратура управления движением корабля при волнении содержит рулевой привод, датчик и задатчик угла курса, датчик угловой скорости, датчик угла перекладки руля, блок перегрузки, блок среднего значения угла перекладки руля, задатчик перегрузки и блок переключения. Выходы датчика угла курса, датчика угловой скорости и задатчика угла курса подключены к соответствующим входам сумматора. Входы блока перегрузки подключены к задатчику перегрузки и датчику угла перекладки руля. Входы блока переключения подключены к выходу сумматора, выходу блока среднего значения угла перекладки руля и выходу блока перегрузки. Выход блока переключения подключен к входу рулевого привода. Изобретение обеспечивает автоматическое выявление и исключение перегрузки рулевого привода в процессе управления движением корабля при развитом морском волнении. 1 ил.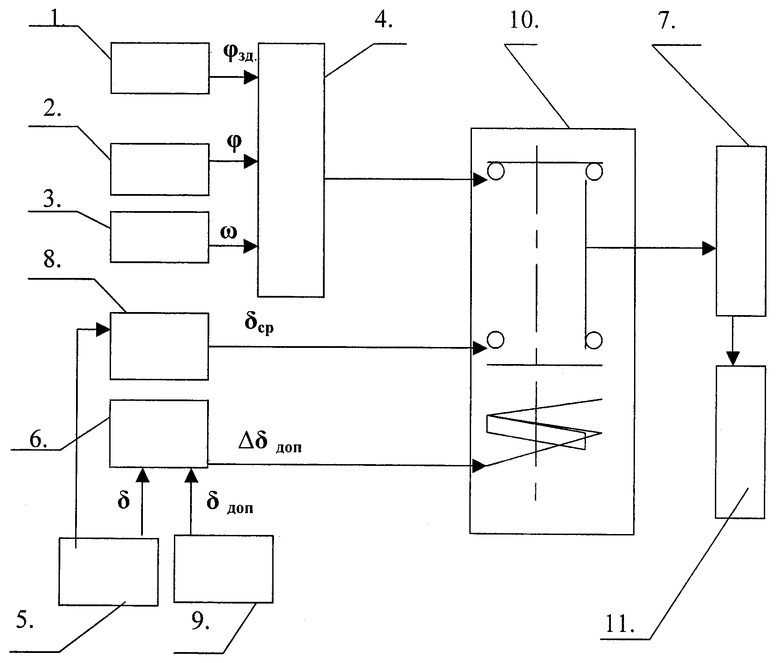
Аппаратура управления движением корабля при волнении, содержащая рулевой привод, сумматор, датчик угловой скорости, датчик и задатчик угла курса, выходы указанных датчиков и задатчика угла курса подключены к соответствующим входам сумматора, отличающаяся тем, что в аппаратуру введены: датчик угла перекладки руля, блок среднего значения угла перекладки руля, блок перегрузки, входы которого подключены к задатчику перегрузки и датчику угла перекладки руля, и блок переключения, входы которого подключены к выходу сумматора, выходу блока среднего значения угла перекладки руля и выходу блока перегрузки, выход блока переключения подключен к входу рулевого привода.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |

