Изобретение относится к области судостроения и предназначено для управления движением корабля (в том числе и для эффективного ручного управления).
Известна система управления движением корабля в пространстве («Результаты создания и испытаний системы управления движением скоростного катера типа «Мираж». Сборник трудов XXXI Всероссийской конференции «Управление движением морскими судами и специальными аппаратами». Изд. ИЛУ РАН, Москва, 2004 г.) в которой для повышения качества и надежности управления используются два канала управления в вертикальной и горизонтальной плоскости с представлением оператору информации о состоянии корабля на автономных электромеханических стрелочных индикаторах параметров движения корабля в вертикальной и горизонтальной плоскостях.
Известна система автоматического управления движением корабля, принятая в качестве прототипа (патент России №2248914), содержащая датчик и задатчик курса, датчик угловой скорости, датчик руля, выходы которых подсоединены к входам первого сумматора-усилителя (первого вычислителя), выход которого соединен со входом рулевого привода. Для бокового управления кораблем используется также информация от датчиков бокового смещения и скорости бокового движения (аналог управления кораблем в вертикальной плоскости). Выходы датчиков состояния корабля и исполнительных устройств соединены с электромеханическими стрелочными указателями на приборной доске пульта управления.
Обе системы, приведенные выше, не позволяют оператору эффективно и надежно управлять движением корабля:
- особенно при управлении вручную по показаниям стрелочных индикаторов на приборной доске пульта управления оператор вынужден мысленно формировать динамику движения корабля;
- осуществлять контроль за функционированием системы (особенно это трудно при пространственном движении корабля);
- отсутствие пространственного и плоскостного представления состояния корабля в динамике на пульте при управлении движением двумя автономными операторами существенно осложняет процесс управления.
Целью предлагаемого изобретения является создание более надежной и живучей системы управления движением корабля, эффективно работающей как при автоматическом управлении кораблем, так и при ручном управлении, улучшающей контроль за движением корабля в пространстве и текущим состоянием технических средств и их исправностью.
Для исключения отмеченных выше недостатков и решения поставленной задачи предлагаемая система дополнительно включает три монитора (выдающие оператору информацию о состоянии корабля в пространстве и средствах управления в динамике, а также объемных и плоских маневрах в горизонтальной и вертикальной плоскостях), два микроконтроллера (вычислитель с электронными моделями движения корабля и формирователь видеоканала). Это позволяет:
- облегчить (повысив качество и надежность) режим ручного управления как при пространственном управлении, так и при работе двух операторов - «горизонтальщика», «вертикальщика»;
- обеспечить вахтенному офицеру (командиру корабля) возможность высококачественного контроля за состоянием корабля и исполнительных органов в динамике;
- обеспечивать более эффективный контроль за работой системы как в автоматическом режиме, так и при ручном управлении;
- диагностировать появление сбоя в системе.
Предлагаемая система управления движением корабля содержит блок задатчиков управления, блок датчиков состояния корабля, блок датчиков состояния исполнительных средств, вычислитель (сумматор-усилитель). Вход вычислителя соединен с выходами блоков датчиков состояния корабля, датчиков состояния исполнительных средств и задатчиков управления. Выход вычислителя соединен с входом блока исполнительных средств. Дополнительно введены микроконтроллер-процессор, микроконтроллер-формирователь видеосигнала, монитор состояния корабля в вертикальной плоскости, монитор состояния корабля в горизонтальной плоскости и монитор состояния корабля в пространстве. Входы микроконтроллера-процессора соединены с блоками задатчика управления, датчиков состояния корабля, состояния исполнительных средств, а выход со входом микроконтроллера-формирователя видеосигнала, выходы которого соединены со входами трех мониторов.
Режим автоматического управления в предлагаемой системе совпадает с описанным в прототипе, отличие только в виде и объеме информации, представляемой оператору на мониторах. Особенно это важно для контроля за работой системы и облегчения ручного управления.
На фиг.1 приведена блок-схема системы управления движением корабля, которая содержит блок задатчиков управления 1, блок датчиков состояния корабля 2, блок датчиков состояния исполнительных средств 3, вычислитель 4, блок исполнительных средств 5, объект управления - корабль 6, микроконтроллер-процессор 7. микроконтроллер-формирователь видеосигнала 8, монитор состояния корабля в вертикальной плоскости 9, монитор состояния корабля в горизонтальной плоскости 10, монитор состояния корабля в пространстве 11.
При реализации системы управления блок задатчиков управления 1 может содержать электромеханические преобразователи заданий глубины, углов курса и дифферента, а также желаемого состояния исполнительных средств (балластных цистерн, угла перекладки горизонтальных и вертикальных рулей) с точностью преобразования около 5% с реализацией, например, на вращающихся трансформаторах; блок датчиков состояния корабля 2 должен включать измерители глубины, углов курса и дифферента с точностью преобразования около 5%, блок датчиков исполнительных средств 3 (балластных цистерн, угла перекладки горизонтальных и вертикальных рулей) с точностью преобразования не ниже 5% с выходами, реализованными на вращающихся трансформаторах; вычислитель 4 (в аналоговом варианте исполнения сумматор-усилитель) может быть реализован на микросхеме типа 140 УД-6; блок исполнительных средств 5 - типовой рулевой привод, входящий в состав основного оборудования корабля (дополнительных требований не выдвигается); микроконтроллер-процессор 7 может быть принят фирмы «ATMEL»(32 бит-ARM, 256 кбит-ОЗУ); микроконтроллер -формирователь видеосигнала 8 - специальных требований не предъявляется, кроме наличия в списке разрешенных к установке на корабли (с быстродействием не ниже 256 мГц и памятью не менее 560 Мбайт; например, видеоконтроллер на базе элементов ЕР 1K3V ТС 144-3 с программируемой логикой фирмы ALTERA; мониторы 9-11 типовые жидкокристаллические дисплеи «LCD» или электронно-лучевые трубки, разрешенные к применению на флоте.
Описание работы системы управления движением корабля.
Режим автоматического управления, как уже отмечалось выше, отличается от известного (например, по патенту Росси №2248914) только наличием на пульте информации судоводителю о динамике состояния корабля и управляющих органов на мониторе 11, что позволяет использовать эту информацию эффективно не только оператору, но и командиру. Для изменения направления движения корабля по курсу судоводитель изменяет величину заданного значения угла курса ϕзд в блоке задатчиков управления 1. Измененный сигнал ϕзд поступает на вход вычислителя 4, на вход которого также поступает значение текущего угла курса ϕ, угловой скорости корабля в плоскости палубы ωI=y и текущего угла перекладки вертикального руля δ на выходе вычислителя 4, при этом формируется сигнал:

где
Ki - коэффициенты регулирования, δ и d/dt δ - текущие значения угла перекладки руля и его угловой скорости, (ϕ-ϕзд) - сигнал рассогласования по курсу, ωi=y - сигнал угловой скорости корабля в горизонтальной плоскости.
Сигнал с выхода блока 4 d/dt δ поступает на вход блока исполнительных средств (рулевой привод) 5, что приведет к отклонению руля и изменению текущего курса корабля. При достижении текущего курса нового заданного значения сигнал рассогласования по курсу (ϕ-ϕзд)=0 и руль при этом вернется в прежнее положение, а корабль будет двигаться по новому заданному направлению ϕ=ϕзд. Если возмущающее воздействие отклонит корабль с заданного курса, т.е.  то в соответствии с зависимостью (1) вновь произойдет отклонение руля, что приведет к возвращению корабля на заданный курс. Аналогично описанному осуществляется автоматическая стабилизация корабля на заданном значении угла крена θ, угла дифферента ψ и глубины Н.
то в соответствии с зависимостью (1) вновь произойдет отклонение руля, что приведет к возвращению корабля на заданный курс. Аналогично описанному осуществляется автоматическая стабилизация корабля на заданном значении угла крена θ, угла дифферента ψ и глубины Н.
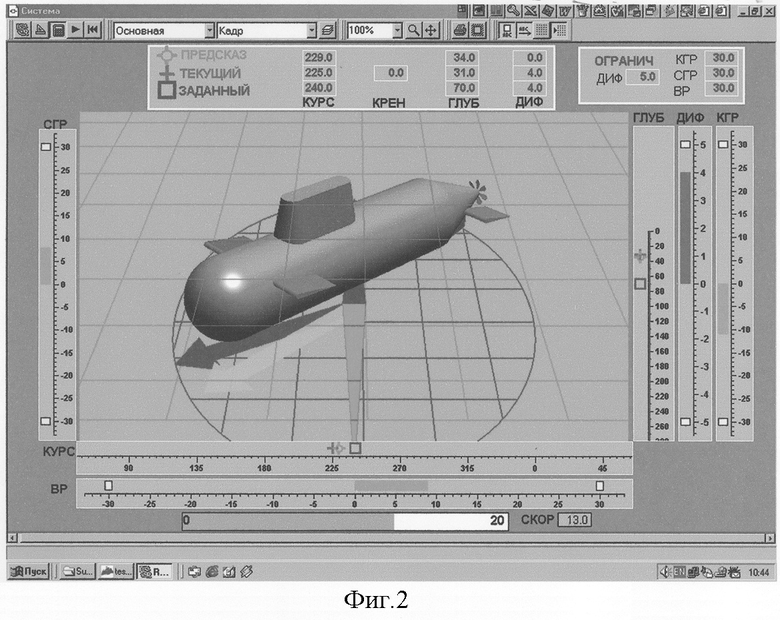
Индикация движения корабля в пространстве высвечивается на жидкокристаллическом дисплее монитора 11 (см. результат моделирования на фиг.2).
Рассмотрим как формируется представление о движении корабля в пространстве на мониторе 11 в перспективной проекции. В микроконтроллере-процессоре 7 введена математическая модель движения корабля в пространстве, программно реализованная в виде (A.M.Басин «Теория устойчивости на курсе и поворотливости судна». Ленинград, Москва, изд. Техникотеоретической литературы, 1949 г.):

где Vi ωi - компоненты линейных и угловых скоростей корабля относительно осей координат x, y, z, δI - исполнительные органы(рули).
Зависимость (2) - это дифференциальные уравнения движения корабля в связанной с кораблем системе координат (три уравнения сил и три уравнения моментов относительно ц.т. корабля).
Текущие значения фазовых координат корабля из блока датчиков состояния корабля 2 и текущие состояния исполнительных средств из блока датчиков состояния исполнительных средств 3 вводятся в виде начальных условий в микроконтроллер-процессор 7 для выработки динамики движения корабля относительно неподвижной системы координат, полученные на выходе микроконтроллера-процессора 7 фазовые координаты состояния корабля в пространстве и состояния исполнительных средств корабля поступают на вход микроконтроллера-формирователя видеосигнала 8, где для отображения движения корабля в перспективной проекции используется мультиплатформенная библиотека «OPEN GL». Полученный с выхода микроконтроллера 8 видеосигнал динамики движения корабля и состояния исполнительных средств поступает на вход монитора 11. На вход монитора 11 также поступает численная величина всех измеряемых параметров. В микроконтроллере-процессоре 7 также формируются невязки величин измеренного значения параметра и его оценки, если невязка выше допустимой величины, вырабатывается сигнал сбоя, который поступает через процессор-формирователь видеосигнала 8 на вход монитора 11 и выражается в мигающем представлении этого параметра.
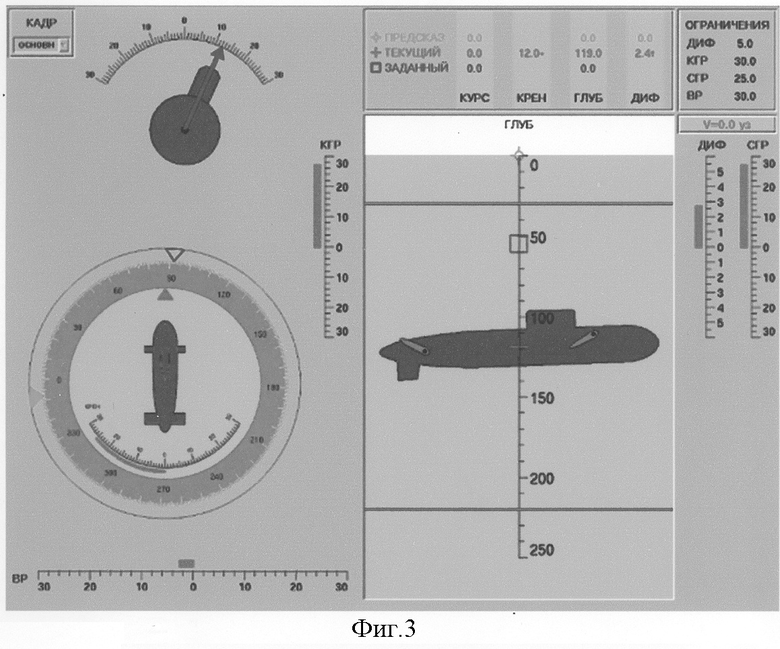
Режим ручного управления движением корабля (см. фиг.3).
Ручное управление может выполняться одним оператором при движении в пространстве с использованием монитора 11, или оператором -«горизонтальщиком» при движении корабля в горизонтальной плоскости с использованием монитора 10, или оператором «вертикальщиком» при движении корабля в вертикальной плоскости с использованием монитора 9.
Режим ручного управления кораблем в пространстве осуществляется оператором с использованием только информации на мониторе 11. Через блок задатчиков управления 1 оператор вводит непосредственно в блок исполнительных средств 5 заданное значение состояния исполнительных средств - δiзд. (Это м.б. отклонение вертикального руля и (или) горизонтального руля и (или) требуемый объем воды в цистернах),что приводит к изменению состояния исполнительного средства, а следовательно, и положения корабля в пространстве. На вход микроконтроллера 7 поступит измененная информация с блока датчиков состояния корабля 2 и блока датчиков состояния исполнительных средств 3, поэтому на выходе микроконтроллера 7 выработается сигнал, соответствующий новому состоянию корабля, который через микроконтроллер-формирователь видеосигнала 8 поступает на вход монитора 11. Оператор использует информацию с монитора 11 для формирования требуемого управляющего воздействия на корабль, осуществляя требуемый маневр корабля в пространстве.
Режим ручного управления кораблем в горизонтальной плоскости осуществляется оператором-«горизонтальщиком» с использованием только информации на мониторе 10. Через блок задатчиков управления 1 оператор вводит непосредственно в блок исполнительных средств 5 заданное значение состояния исполнительного средства δiзд (это только вертикальные рули), на выходе микроконтроллера 7 выработается сигнал, соответствующий новому состоянию корабля в горизонтальной плоскости, последний через микроконтроллер-формирователь видеосигнала 8 поступит на вход монитора 10. Оператор использует информацию с монитора 10 для формирования требуемого управляющего воздействия на корабль, осуществляя тем самым требуемый маневр корабля в горизонтальной плоскости. Аналогично осуществляется управление кораблем в вертикальной плоскости оператором-«вертикильщиком» только с использованием в качестве задатчиков исполнительных средств δiзд (горизонтальных рулей и (или) задания требуемого количества воды в цистернах), а в качестве источника информации данные с монитора 9.
Проведенное моделирование на персональном компьютере подтвердило эффективность использования описанной системы управления движением корабля как в пространстве, так и при плоскостном движении с использованием только монитора 8 или 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПО ГЛУБИНЕ | 2009 |
|
RU2392183C1 |
| СПОСОБ СЖАТИЯ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2013 |
|
RU2539622C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ СТРУКТУРЫ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2010 |
|
RU2423286C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2465169C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С УЧЕТОМ ВОЛНЕНИЯ | 2011 |
|
RU2499727C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| СПОСОБ ОТКАЗОБЕЗОПАСНОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2010 |
|
RU2432297C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ | 2012 |
|
RU2492105C1 |
Изобретение относится к области судовождения, в частности к управлению движением кораблей и морских судов. Система содержит блок задатчиков управления, блок датчиков состояния корабля, блок датчиков состояния исполнительных средств, вычислитель, к входу которого подключены выходы блока задатчиков управления, блока датчиков состояния корабля и блока датчиков состояния исполнительных средств. Первый выход вычислителя соединен с первым входом блока исполнительных средств, второй вход которого соединен с выходом блока задатчиков управления. Дополнительно введены микроконтроллер-процессор, микроконтроллер-формирователь видеосигнала, монитор состояния корабля в вертикальной плоскости, монитор состояния корабля в горизонтальной плоскости и монитор состояния корабля в пространстве. К первому входу микроконтроллера-процессора подключен выход блока задатчика управления, к второму входу подключен выход блока датчиков состояния корабля, к третьему входу подключен выход датчика состояния исполнительных средств, к четвертому входу - второй выход вычислителя. Выход микроконтроллера-процессора соединен со входом микропроцессора-формирователя видеосигнала, выходы которого соединены со входами монитора состояния корабля в вертикальной плоскости, монитора состояния корабля в горизонтальной плоскости, монитора состояния корабля в пространстве. Достигается надежность и живучесть системы управления движением корабля. 3 ил.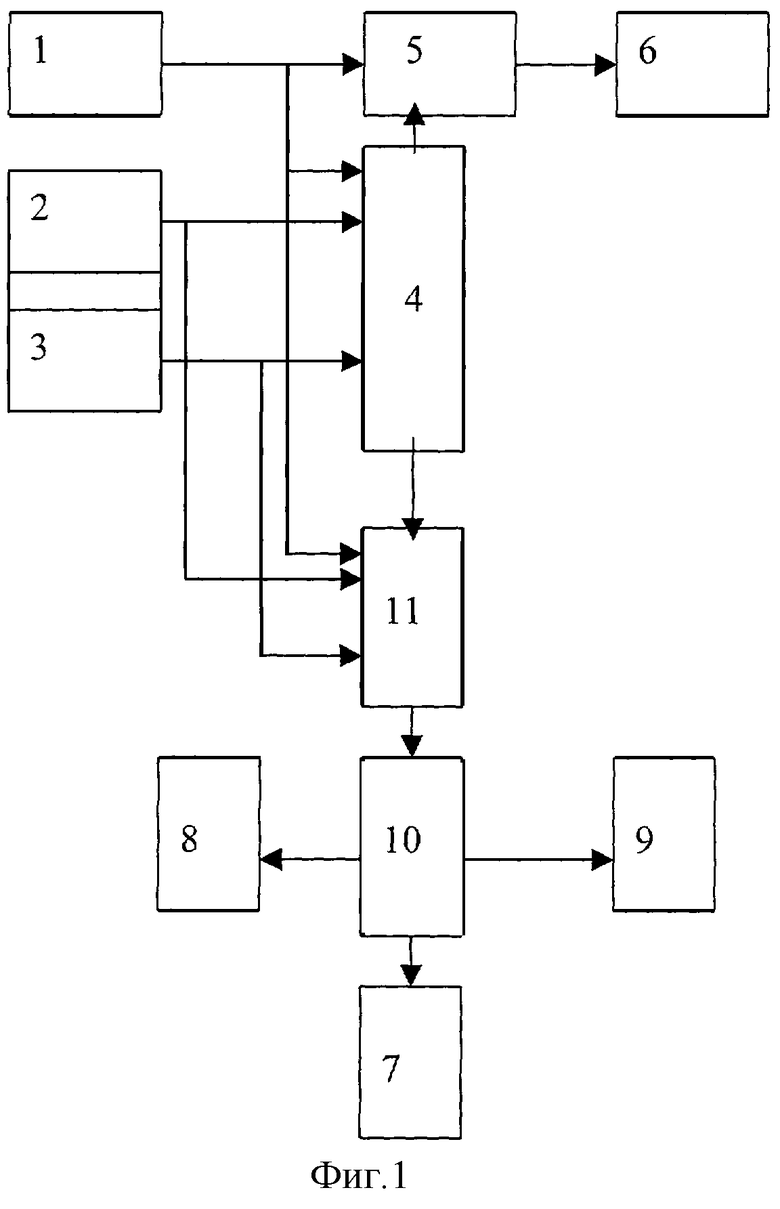
Система управления движением корабля содержит блок задатчиков управления, блок датчиков состояния корабля, блок датчиков состояния исполнительных средств, вычислитель, к входу которого подключены выходы блока задатчиков управления, блока датчиков состояния корабля и блока датчиков состояния исполнительных средств, первый выход вычислителя соединен с первым входом блока исполнительных средств, второй вход которого соединен с выходом блока задатчиков управления, отличающаяся тем, что дополнительно введены микроконтроллер-процессор, микроконтроллер-формирователь видеосигнала, монитор состояния корабля в вертикальной плоскости, монитор состояния корабля в горизонтальной плоскости и монитор состояния корабля в пространстве, к первому входу микроконтроллера-процессора подключен выход блока задатчика управления, к второму входу подключен выход блока датчиков состояния корабля, к третьему входу подключен выход датчика состояния исполнительных средств, к четвертому входу - второй выход вычислителя, выход микроконтроллера-процессора соединен со входом микропроцессора-формирователя видеосигнала, выходы которого соединены со входами монитора состояния корабля в вертикальной плоскости, монитора состояния корабля в горизонтальной плоскости, монитора состояния корабля в пространстве.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| US 3927635 A, 23.12.1975 | |||
| US 5983145 A, 09.11.1999. | |||

