Настоящее изобретение касается способа автоматического пилотирования летательного аппарата с несущим винтом, содержащего, по меньшей мере, один толкающий винт, а также устройства автоматического пилотирования и летательного аппарата.
Среди летательных аппаратов известны, в частности, винтокрылые летательные аппараты, оборудованные несущим винтом, в том числе вертолеты.
Например, вертолет содержит несущий винт, причем этот несущий винт содержит, по меньшей мере, один главный винт, обеспечивающий движение и подъемную силу этого вертолета.
Продольный наклон и, следовательно, угол тангажа вертолета зависят при этом от скорости перемещения этого вертолета. На большой скорости вертолет имеет большой угол тангажа и, следовательно, большой продольный наклон, который необходимо компенсировать пикированием.
Понятно, что на большой скорости вертолет имеет большой аэродинамический угол атаки, который необходимо уменьшить, и этот аэродинамический угол атаки создает нежелательное аэродинамическое лобовое сопротивление.
Следует напомнить, что продольный наклон винтокрылого летательного аппарата является углом тангажа упомянутого винтокрылого летательного аппарата, то есть углом между продольной осевой линией винтокрылого летательного аппарата и ортогональной проекцией этой продольной осевой линии на плоскость нормали к направлению силы тяжести.
Что же касается аэродинамического угла атаки винтокрылого летательного аппарата, то он представляет собой угол между продольной осевой линией винтокрылого летательного аппарата и ортогональной проекцией вектора воздушной скорости этого винтокрылого летательного аппарата в вертикальной плоскости, содержащей упомянутую продольную осевую линию вектора воздушной скорости этого винтокрылого летательного аппарата.
Наконец, углом наклона траектории относительно воздуха называют угол вектора воздушной скорости этого летательного аппарата по отношению к его ортогональной проекции на плоскость нормали к направлению силы его тяжести.
Таким образом, продольный наклон винтокрылого летательного аппарата равен алгебраической сумме аэродинамического угла атаки и угла наклона траектории относительно воздуха этого летательного аппарата.
Кроме того, некоторые винтокрылые летательные аппараты оснащены, по меньшей мере, одним толкающим винтом.
За счет этого становится возможным корректировать раздельно продольную скорость движения, вертикальную скорость и продольный наклон такого винтокрылого летательного аппарата.
Настоящее изобретение призвано предложить способ для облегчения работы пилота летательного аппарата с несущим винтом, содержащего, по меньшей мере, один толкающий винт, при этом способ позволяет, в случае необходимости, сводить к минимуму аэродинамическое лобовое сопротивление летательного аппарата.
Среди известных источников информации следует указать документ US 2011/040431 и документ US 2008/0237392, в которых раскрыт летательный аппарат с несущим винтом, оборудованный также толкающим винтом.
Согласно документу US 2008/0237392 подсистема архитектуры управления предназначена для вертикального контроля и контроля тангажа летательного аппарата.
Документ WO 99/50611 относится к технической области, далекой от области изобретения, и этот документ WO 99/50611 касается системы контроля и управления стрельбой.
Объектом изобретения является способ автоматического пилотирования летательного аппарата, при этом летательный аппарат содержит несущий винт и, по меньшей мере, один толкающий винт, причем этот несущий винт содержит, по меньшей мере, один винт, оборудованный множеством лопастей.
Этот способ отличается, в частности, тем, что в режиме автоматизированного пилотирования с выдерживанием угла атаки аэродинамический угол атаки поддерживают равным опорному углу атаки посредством автоматического управления общим шагом упомянутых лопастей.
Работа пилота при этом облегчается, и в случае необходимости этот пилот может сконцентрировать свое внимание только на контроле, например, двух параметров, а именно продольного наклона и продольной скорости движения, а не трех параметров. Кроме того, пилот может управлять летательным аппаратом, задавая оптимальный аэродинамический угол атаки для минимизации аэродинамического лобового сопротивления этого летательного аппарата.
Под выражением «поддерживают аэродинамический угол атаки летательного аппарата равным опорному углу атаки» следует понимать то, что стремятся поддерживать аэродинамический угол атаки летательного аппарата равным опорному углу атаки. Действительно, как только аэродинамический угол атаки летательного аппарата становится не равным опорному углу атаки, для устранения этого неравенства воздействуют на общий шаг лопастей.
Следует отметить, что документ US 2008/0237392 не ссылается на угол атаки.
Кроме того, в документе WO 99/50611 не упоминается автоматизированный режим выдерживания угла атаки для поддержания угла атаки летательного аппарата равным опорному значению, а раскрывается режим выдерживания высоты полета, при котором угол атаки не должен превышать определенный предел для обеспечения стрельбы.
Режим выдерживания угла атаки в соответствии с изобретением предназначен не для выдерживания постоянной высоты полета, а для выдерживания постоянного угла атаки летательного аппарата.
Кроме того, способ может содержать один или несколько следующих отличительных признаков.
Например, можно автоматически управлять общим шагом лопастей для контроля вертикальной воздушной скорости летательного аппарата таким образом, чтобы поддерживать аэродинамический угол атаки летательного аппарата равным опорному углу атаки в соответствии со следующим отношением:
α*=θ-Arc sin(VZ/TAS),
где “VZ” обозначает вертикальную воздушную скорость летательного аппарата, “TAS” обозначает истинную воздушную скорость летательного аппарата, “θ” обозначает текущий продольный наклон и “α*” обозначает опорный угол атаки.
Действительно, на таком летательном аппарате систему параметров, включающую в себя продольную воздушную скорость, вертикальную воздушную скорость и продольный наклон, можно заменить альтернативной системой, включающей в себя истинную воздушную скорость летательного аппарата, называемую на английском языке “true air speed”, продольный наклон и аэродинамический угол атаки летательного аппарата.
Угол наклона траектории относительно воздуха летательного аппарата можно получить при помощи следующего отношения:
γ=Arc sin(VZ/TAS),
где “γ” обозначает угол наклона траектории относительно воздуха, “VZ” обозначает вертикальную воздушную скорость летательного аппарата, и “TAS” обозначает истинную воздушную скорость.
Согласно изобретению из этого отношения выводят следующее уравнение:
α*=θ-Arc sin(VZ/TAS),
где “VZ” обозначает вертикальную воздушную скорость летательного аппарата, “TAS” обозначает истинную воздушную скорость, “θ” обозначает текущий продольный наклон, и “α*” обозначает аэродинамический угол атаки.
Для данного продольного наклона, управляя общим шагом лопастей, изменяют вертикальную воздушную скорость и, следовательно, аэродинамический угол атаки летательного аппарата.
Если скорость движения летательного аппарата меняется и, следовательно, если меняется истинная воздушная скорость или если меняется текущий продольный наклон, автоматически изменяют общий шаг лопастей для поддержания аэродинамического угла атаки летательного аппарата равным опорному углу атаки.
Согласно другому отличительному признаку опорный угол атаки может быть равным текущему аэродинамическому углу атаки летательного аппарата в момент запуска режима автоматизированного пилотирования с выдерживанием угла атаки.
Этот способ является простым, поскольку пилоту нет необходимости регулировать опорный угол атаки перед запуском режима автоматизированного пилотирования с выдерживанием угла атаки.
Кроме того, значение опорного угла атаки можно изменять в ходе полета.
Таким образом, пилот может корректировать опорный угол атаки, если он сочтет это необходимым.
Новый опорный угол атаки можно определить при помощи средства регулирования, такого как:
- кнопка на органе управления общим шагом в цепи управления общим шагом лопастей несущего винта, причем эта кнопка предназначена для увеличения или уменьшения общего шага лопастей, когда режим автоматизированного пилотирования с выдерживанием угла атаки не включен,
- средство управления, специально предназначенное для такого применения,
- кнопка включения силового цилиндра триммера в цепи управления общим шагом лопастей несущего винта, при этом в момент включения силового цилиндра триммера текущий угол атаки становится опорным углом атаки.
Следует отметить, что согласно первому варианту выполнения пилот воздействует на продольный наклон летательного аппарата, циклически управляя шагом лопастей несущего винта. Поскольку аэродинамический угол атаки поддерживают равным опорному углу атаки, то пилот, управляя продольным наклоном при помощи органа циклического управления полетом, связанного, по меньшей мере, с цепью циклического управления циклическим шагом лопастей несущего винта, изменяет угол наклона траектории относительно воздуха летательного аппарата. В результате пилотирование становится более удобным.
«Органом циклического управления полетом» называют орган управления полетом, действующий на циклический шаг лопастей несущего винта.
Согласно второму варианту выполнения можно автоматически поддерживать продольный наклон равным опорному продольному наклону.
Согласно этому второму варианту выполнения летательный аппарат содержит автоматическую систему для поддержания продольного наклона равным опорному наклону. Опорный наклон может быть текущим наклоном летательного аппарата в момент приведения в действие этой системы выдерживания наклона или опорным наклоном, например, установленным при помощи кнопки.
Эта автоматическая система может быть системой автопилота, известной под английским названием “Automatic Flight Control System” или сокращенно “AFCS”.
Понятно, что в этом случае в уравнении α*=θ-Arc sin(VZ/TAS) “θ” обозначает опорный продольный наклон.
Согласно факультативному варианту, если пилот намеревается воздействовать на орган циклического управления полетом, связанный, по меньшей мере, с цепью циклического управления циклическим шагом лопастей несущего винта, для изменения продольного наклона, то согласно базовой версии система выдерживания наклона больше не обеспечивает поддержание наклона в значении опорного наклона.
При этом, когда пилот перестает воздействовать на этот орган циклического управления полетом, автоматическая система выдерживания наклона автоматически включается, при этом опорный наклон является опорным наклоном, сохраненным в памяти до воздействия пилота на орган циклического управления полетом.
Согласно этой базовой версии опорный наклон не меняется, когда пилот воздействует на орган продольного циклического управления полетом для ручного управления продольным наклоном, а автоматическая система выдерживания наклона блокируется.
Согласно тактическому варианту осуществляют автоматическое регулирование опорного продольного наклона по текущему значению продольного наклона, когда пилот воздействует на орган продольного циклического управления полетом, изменяя продольный наклон.
При этом, когда пилот перестает воздействовать на этот орган циклического управления полетом, автоматическая система выдерживания наклона автоматически включается, при этом опорный наклон является текущим наклоном при повторном запуске системы выдерживания наклона.
Точно так же в факультативном варианте аэродинамический угол атаки летательного аппарата перестают поддерживать равным опорному углу атаки, когда пилот воздействует на орган управления общим шагом упомянутых лопастей несущего винта.
Следует отметить, что можно, например, использовать тяги передачи усилий, установленные на кинематических цепях управления, чтобы определить, что пилот воздействует на орган управления полетом.
Кроме того, опорный угол атаки можно ограничить.
Из соображений обеспечения безопасности запоминание аберрантных и даже опасных значений блокируют посредством ограничения опорного угла атаки интервалом, например, в пределах от -4 град. до +4 град.
Согласно другому отличительному признаку можно вывести на экран первый символ, представляющий опорный вектор воздушной скорости на искусственном горизонте, чтобы пилот мог визуально контролировать опорный угол наклона траектории относительно воздуха и опорный угол атаки.
Согласно первому варианту выполнения пилот летательного аппарата управляет продольным наклоном, при этом угол между текущим наклоном, выведенным на искусственный горизонт, и вектором опорной воздушной скорости показывает по сути дела опорный угол атаки.
Согласно второму варианту выполнения на искусственный горизонт выводят второй символ, представляющий опорный продольный наклон.
В этом случае угол между первым символом и вторым символом по сути дела отображает опорный угол атаки.
Кроме того, можно предусмотреть выведение третьего символа, представляющего текущий вектор воздушной скорости на искусственном горизонте, при этом текущий вектор воздушной скорости характеризует текущий угол наклона траектории относительно воздуха летательного аппарата.
Кроме того, можно предусмотреть выведение на экран четвертого символа, представляющего текущий вектор путевой скорости на искусственном горизонте, при этом текущий вектор путевой скорости характеризует текущий угол наклона траектории относительно земли летательного аппарата.
В случае необходимости, когда на горизонте выведен, по меньшей мере, один символ для показа опорного угла атаки, можно менять цвет этого символа, когда автоматическое управление общим шагом лопастей для поддержания упомянутого опорного угла атаки требует мощности, превышающей пороговую мощность, и опорный угол атаки автоматически меняют для соблюдения этой пороговой мощности.
Действительно, поскольку задачей изобретения является поддержание аэродинамического угла атаки в значении опорного угла атаки посредством воздействия на общий шаг лопастей несущего винта, существует риск выхода за пределы диапазона мощности, связанного с этим несущим винтом.
В этой конфигурации, чтобы избежать этой ситуации, меняют опорный угол атаки, и пилот узнает об этом по изменению цвета, по меньшей мере, одного символа, представляющего опорный угол атаки.
Поскольку летательный аппарат с несущим винтом содержит также, по меньшей мере, одно крыло, следует отметить, что выводимые на экран символы для показа опорного угла атаки или текущего угла атаки позволяют оценить угол атаки крыла летательного аппарата и, следовательно, предупредить срыв потока с этого крыла.
Помимо способа, объектом изобретения является также устройство для применения этого способа.
Таким образом, объектом изобретения является устройство автоматического пилотирования летательного аппарата с несущим винтом, при этом летательный аппарат содержит, по меньшей мере, один толкающий винт, при этом несущий винт содержит, по меньшей мере, один винт, оборудованный множеством лопастей, при этом устройство содержит блок обработки, взаимодействующий, по меньшей мере, с общей цепью управления общим шагом упомянутых лопастей.
Это устройство отличается, в частности, тем, что содержит средство запуска режима автоматизированного пилотирования с выдерживанием угла атаки, соединенное с блоком обработки, при этом блок обработки автоматически управляет общим шагом лопастей, когда режим автоматизированного пилотирования с выдерживанием угла атаки включен, контролируя общую цепь управления для поддержания аэродинамического угла атаки летательного аппарата в значении опорного угла атаки.
Это устройство может также содержать один или несколько следующих отличительных признаков.
Поскольку блок обработки автоматически управляет общим шагом упомянутых лопастей, то для того, чтобы контролировать вертикальную воздушную скорость летательного аппарата таким образом, чтобы поддерживать угол атаки летательного аппарата равным опорному углу атаки согласно следующему отношению α*=θ-Arc sin(VZ/TAS), где “VZ” обозначает вертикальную воздушную скорость летательного аппарата, “TAS” обозначает истинную воздушную скорость летательного аппарата, “θ” обозначает текущий продольный наклон летательного аппарата и “α*” обозначает опорный угол атаки, устройство может содержать совокупность средств, связанных с блоком обработки, для определения вертикальной воздушной скорости летательного аппарата, истинной воздушной скорости летательного аппарата и текущего продольного наклона.
Например, в совокупность средств входят:
- первое обычное средство определения истинной воздушной скорости, в котором применяют трубку Пито или аналогичное устройство,
- второе обычное средство определения продольного наклона, в котором применяют прибор, называемый на английском языке “Attitude Heading Reference System”,
- третье обычное средство определения вертикальной воздушной скорости, в котором используют замер статического давления.
Согласно другому отличительному признаку устройство может содержать средство регулирования опорного угла атака, связанное с блоком обработки.
Кроме того, устройство может содержать автоматическую систему для поддержания продольного наклона летательного аппарата равным опорному наклону, причем эта автоматическая система взаимодействует, по меньшей мере, с продольной цепью циклического управления циклическим шагом лопастей несущего винта.
В варианте автоматическая система может содержать специальное вычислительное устройство.
Согласно другому варианту блок обработки выполняет роль автоматической системы. В этом случае блок обработки может управлять цепями циклического и общего управления шагом лопастей.
Кроме того, устройство может содержать устройство визуального отображения, связанное с блоком обработки, для отображения, по меньшей мере, одного символа, показывающего опорный угол атаки.
Наконец, объектом изобретения является летательный аппарат с несущим винтом, содержащий, по меньшей мере, один толкающий винт, при этом летательный аппарат содержит описанное выше устройство управления.
Изобретение и его преимущества будут более очевидны из нижеследующего описания иллюстративных примеров выполнения со ссылками на прилагаемые фигуры, на которых:
Фиг. 1 - схематичный вид летательного аппарата.
Фиг. 2 и 3 - схемы первого варианта выполнения.
Фиг. 4 и 5 - схемы второго варианта выполнения.
Элементы, показанные на разных фигурах, обозначены одними и теми же позициями.
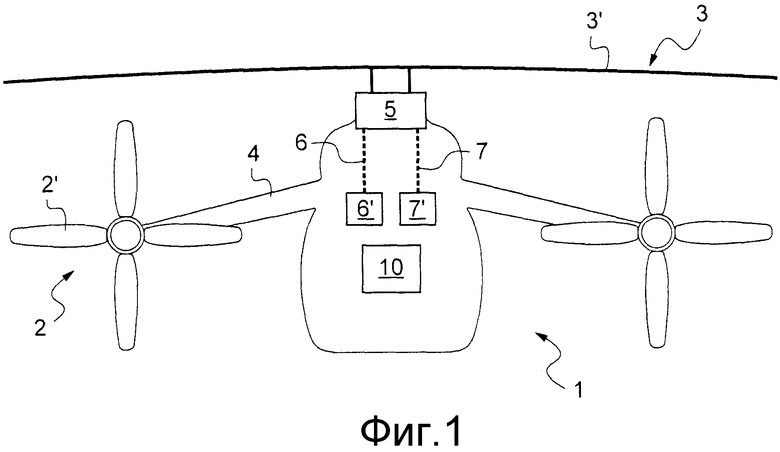
На фиг. 1 показан летательный аппарат 1, оснащенный несущим винтом и, по меньшей мере, одним толкающим винтом 2.
Каждый толкающий винт 2 содержит множество первых лопастей 2', в частности, участвуя в обеспечении движения летательного аппарата. Кроме того, необходимо отметить, что, поскольку летательный аппарат может быть также оснащен неподвижной несущей поверхностью 4, толкающие винты 2 могут быть установлены на этой неподвижной несущей поверхности 4.
Кроме того, несущий винт 3 содержит, по меньшей мере, один винт 3, оборудованный множеством вторых лопастей 3', иногда называемых просто «лопастями 3'».
При этом летательный аппарат содержит средство 5 регулирования шага вторых лопастей 3', причем это средство 5 регулирования может содержать, по меньшей мере, три непоказанных сервопривода для изменения общего шага и циклического шага вторых лопастей 3'.
Действительно, если сервоприводы выпускаются или убираются на одну и ту же величину, изменяется общий шаг лопастей 3'. Если же один сервопривод ведет себя отлично от других, изменяется циклический шаг вторых лопастей 3'. Для более подробной информации об общем шаге и циклическом шаге винта винтокрылого летательного аппарата можно обратиться к соответствующей литературе.
Для ручного управления общим шагом вторых лопастей 3' летательный аппарат содержит цепь 7 общего управления, связанную со средством регулирования. Цепь 7 общего управления взаимодействует с органом 7' общего управления полетом, например, типа рычага общего шага.
Кроме того, для ручного управления циклическим шагом вторых лопастей 3' летательный аппарат содержит, по меньшей мере, одну цепь 6 циклического управления, связанную со средством регулирования. При этом каждая цепь 6 циклического управления взаимодействует с органом 6' циклического управления полетом, например, типа рукоятки циклического управления.
Таким образом, цепь циклического управления продольным наклоном позволяет задавать изменение продольного наклона летательного аппарата 1.
Кроме того, летательный аппарат 1 оборудован устройством 10 автоматического пилотирования, взаимодействующим с цепями управления, в частности, через параллельные силовые цилиндры или силовые цилиндры триммеров, которые являются относительно медленными, но имеют большую амплитуду движения, и/или через последовательные силовые цилиндры, которые являются относительно быстрыми, но имеют небольшую амплитуду движения.
Устройство 10 может также взаимодействовать с электродистанционной или оптической системой управления полетом.
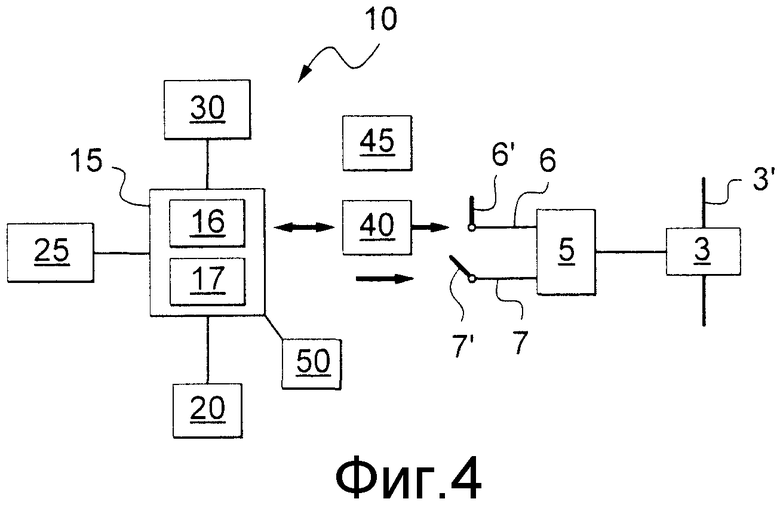
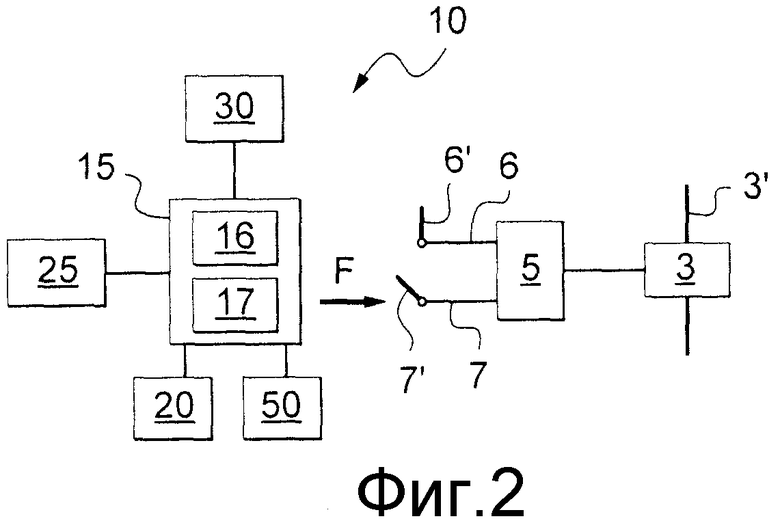
На фиг. 2 показано устройство 10 согласно первому варианту выполнения.
Независимо от варианта выполнения устройство 10 содержит блок 15 обработки. Этот блок обработки может содержать средство 16 вычисления, исполняющее команды, записанные в памяти 17.
Как показано стрелкой F, блок 15 обработки может подать команду, в частности, на цепь 7 общего управления для изменения общего шага вторых лопастей 3', например, контролируя параллельный силовой цилиндр и/или последовательный силовой цилиндр этой цепи 7 общего управления.
Для этого блок 15 обработки может быть соединен со средством 20 запуска режима автоматизированного пилотирования с выдерживанием угла атаки.
Во время этого режима автоматизированного пилотирования с выдерживанием угла атаки аэродинамический угол атаки α автоматически поддерживают равным опорному углу атаки α* за счет автоматического управления общим шагом упомянутых вторых лопастей 3'. Выражение «аэродинамический угол атаки α автоматически поддерживают равным опорному углу атаки α*» значит, что общим шагом лопастей автоматически управляют таким образом, чтобы текущий аэродинамический угол атаки летательного аппарата стремился к опорному углу атаки и даже чтобы он был равным этому опорному углу атаки.
Таким образом, когда пилот задает режим автоматизированного пилотирования с выдерживанием угла атаки посредством воздействия на средство 20 запуска, блок 15 обработки автоматически управляет общим шагом лопастей 3, контролируя цепь общего управления для поддержания аэродинамического угла атаки α летательного аппарата равным опорному углу атаки α*.
Опорный угол атаки α* может быть равным текущему аэродинамическому углу атаки α летательного аппарата 1 в момент запуска режима автоматизированного пилотирования с выдерживанием угла атаки.
Вместе с тем во время полета значение опорного угла атаки α* можно изменять вручную.
Действительно, устройство 10 может включать в себя средство 20 регулирования, управляемое пилотом, для определения этого значения опорного угла атаки α*.
Независимо от версии следует отметить, что опорный угол атаки может быть ограничен блоком 15 обработки.
Кроме того, устройство 10 может содержать устройство 30 визуального отображения, соединенное с блоком 15 обработки для выведения на экран, по меньшей мере, одного символа, показывающего опорный угол атаки α*.
Для автоматического управления общим шагом упомянутых вторых лопастей 3' блок 15 обработки может контролировать вертикальную воздушную скорость летательного аппарата таким образом, чтобы поддерживать аэродинамический угол атаки летательного аппарата равным опорному углу атаки согласно следующему отношению:
α*=θ-Arc sin(VZ/TAS),
где “VZ” обозначает вертикальную воздушную скорость летательного аппарата, “TAS” обозначает истинную воздушную скорость летательного аппарата, “θ” обозначает текущий продольный наклон и “α*” обозначает опорный угол атаки.
При этом устройство 10 содержит совокупность средств 25, соединенных с блоком обработки, для определения вертикальной воздушной скорости летательного аппарата, истинной воздушной скорости летательного аппарата и текущего продольного наклона.
Согласно первому варианту выполнения пилот воздействует на текущий продольный наклон летательного аппарата, циклически контролируя шаг вторых лопастей 3' несущего винта через орган 6' циклического управления полетом.
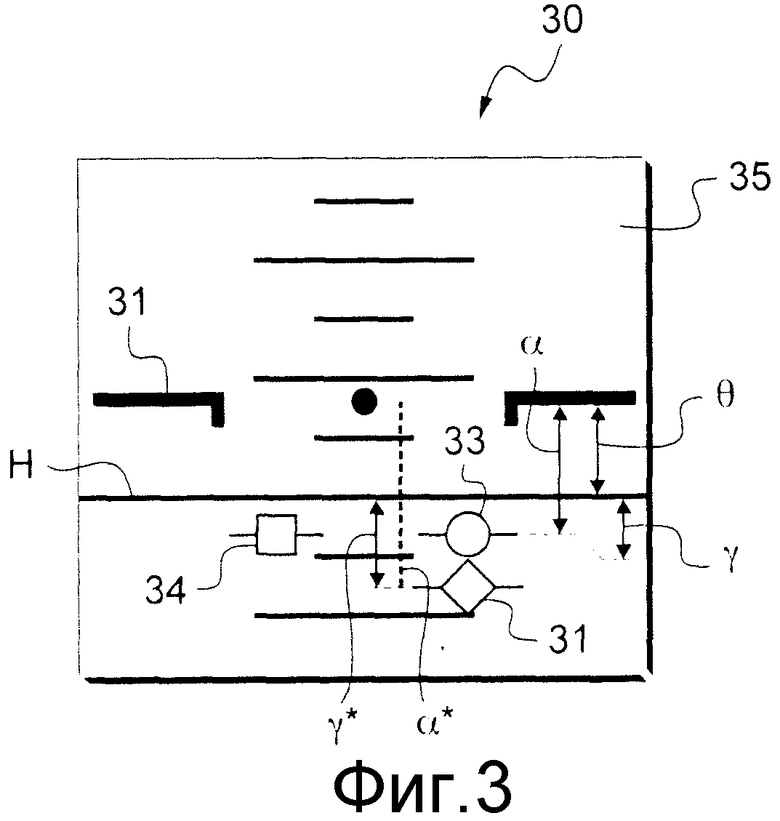
При этом, как показано на фиг. 3, устройство 30 визуального отображения может содержать искусственный горизонт 35, на котором появляется макет 31 летательного аппарата 1.
Блок обработки задает вывод на экран первого символа 31 для отображения опорного угла атаки.
Действительно, блок 15 обработки определяет опорный угол наклона траектории относительно воздуха γ*, соответствующий вектору опорной воздушной скорости V*, и выводит на экран первый символ 31, представляющий этот опорный угол наклона траектории относительно воздуха γ* и вектор опорной воздушной скорости V*.
При этом первый символ получают через уравнение γ*=θ-α*.
Таким образом, первое пространство, отделяющее макет 31 от горизонта Н, характеризует текущий продольный наклон θ, второе пространство, отделяющее горизонт Н от третьего символа 33, характеризует опорный угол наклона траектории относительно воздуха γ*, третье пространство, отделяющее макет 31 от третьего символа 33, характеризует опорный угол атаки α*.
Таким образом, пилот легко визуально контролирует этот опорный угол атаки.
Кроме того, следует отметить, что блок обработки может задавать выведение на экран символа, для удобства называемого «третьим символом 33», представляющего текущий вектор воздушной скорости летательного аппарата. При этом четвертое пространство, отделяющее горизонт Н от третьего символа 33, характеризует текущий угол наклона траектории относительно воздуха, и пятое пространство, отделяющее макет 31 от третьего символа 33, характеризует текущий аэродинамический угол атаки α.
Кроме того, блок обработки может задавать выведение на экран четвертого символа 34, обозначающего вектор путевой скорости. При этом пятое пространство, отделяющее горизонт Н от четвертого символа 34, характеризует текущий угол наклона траектории относительно земли.
Как показано на фиг. 4, согласно второму варианту выполнения продольный наклон θ автоматически поддерживают равным опорному продольному наклону θ*. При этом текущий продольный наклон равен опорному наклону.
Следовательно, устройство 10 содержит автоматическую систему 40 для поддержания продольного наклона летательного аппарата равным опорному наклону. Устройство 10 может содержать орган 45 регулирования опорного наклона и даже орган запуска этого варианта выполнения.
При этом выражение «для поддержания продольного наклона летательного аппарата равным опорному наклону» значит, что циклическим продольным шагом лопастей 3' управляют автоматически таким образом, чтобы текущий продольный наклон летательного аппарата стремился к опорному наклону и даже чтобы он был равен этому опорному наклону.
Эта автоматическая система 40 взаимодействует, по меньшей мере, с продольной цепью 6 циклического управления циклическим шагом лопастей несущего винта.
Кроме того, автоматическая система может быть включена в блок 15 обработки.
Кроме того, совокупность средств 25 может включать в себя датчики усилий, установленные в продольной цепи циклического управления.
Таким образом, согласно базовой версии автоматическая система 40 не изменяет опорный наклон, когда пилот воздействует на орган продольного циклического управления полетом для ручного управления продольным наклоном. Тем не менее, эта автоматическая система при этом блокируется.
Когда пилот перестает воздействовать на этот орган циклического управления полетом, автоматическая система выдерживания наклона автоматически включается, при этом опорный наклон является опорным наклоном, сохраненным в памяти до того, как пилот начал воздействовать на орган циклического управления полетом.
Согласно тактической версии опорный продольный наклон автоматически устанавливается по текущему значению продольного наклона, когда пилот воздействует на орган продольного циклического управления полетом, изменяя продольный наклон.
При этом, когда пилот перестает воздействовать на этот орган циклического управления полетом, автоматическая система выдерживания наклона автоматически включается, при этом опорный наклон является текущим наклоном при повторном запуске системы выдерживания наклона.
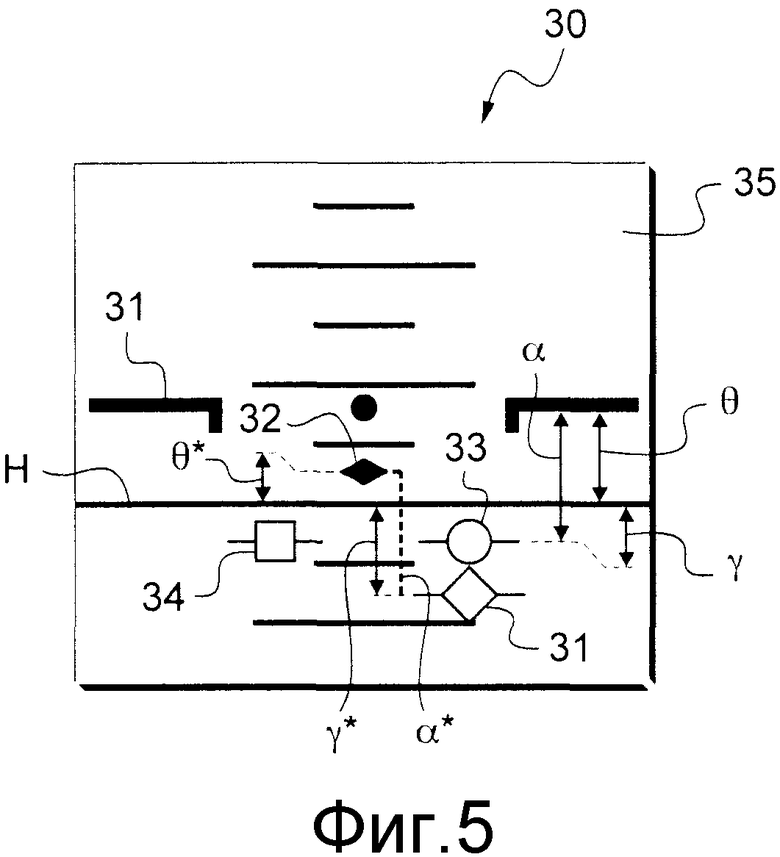
Как показано на фиг. 5, согласно этому второму варианту выполнения блок 15 обработки определяет опорный угол наклона траектории относительно воздуха γ*, соответствующий вектору опорной воздушной скорости V*, и выводит на экран первый символ 31, показывающий этот опорный угол наклона траектории относительно воздуха γ* и вектор опорной воздушной скорости V*.
При этом первый символ получают через уравнение γ*=θ*-α*, где θ* обозначает опорный наклон.
Кроме того, блок обработки может выводить на экран второй символ 32, обозначающий этот опорный наклон θ*, и вышеуказанный третий символ.
Таким образом, первое пространство, отделяющее второй символ 32 от горизонта Н, характеризует опорный наклон θ*, второе пространство, отделяющее горизонт Н от третьего символа 33, характеризует опорный угол наклона траектории относительно воздуха γ*, и третье пространство, отделяющее второй символ 32 от третьего символа 33, характеризует опорный угол атаки α*.
Таким образом, пилот легко визуально контролирует этот опорный угол атаки.
Кроме того, блок обработки может задавать выведение на экран четвертого символа 34, обозначающего вектор путевой скорости.
Естественно, в настоящее изобретение можно вносить самые разные изменения в части его применения. Выше были описаны несколько вариантов выполнения, но при этом понятно, что все возможные варианты невозможно идентифицировать избыточным образом. Разумеется, можно предусмотреть замену описанного средства эквивалентным средством, не выходя за рамки настоящего изобретения.
Изобретение относится к области авиации, в частности к системам автоматического управления полетом. Устройство (10) автоматического пилотирования летательного аппарата (1) с несущим винтом, содержащего, по меньшей мере, один толкающий винт (2), при этом упомянутый несущий винт содержит, по меньшей мере, один винт (3), оборудованный множеством лопастей (3'), содержит блок (15) обработки, взаимодействующий, по меньшей мере, с общей цепью (7) управления общим шагом упомянутых лопастей (3'). Устройство (10) содержит средство (20) запуска режима автоматизированного пилотирования с выдерживанием угла атаки, соединенное с блоком (15) обработки. Блок (15) обработки автоматически управляет общим шагом лопастей (3'), когда режим автоматизированного пилотирования с выдерживанием угла атаки включен, контролируя упомянутую общую цепь управления для поддержания аэродинамического угла атаки (α) летательного аппарата в значении опорного угла атаки (α*). Достигается снижение до минимума аэродинамического лобового сопротивления летательного аппарата. 3 н. и 16 з.п. ф-лы, 5 ил.
1. Способ автоматического пилотирования летательного аппарата (1) с несущим винтом, при этом упомянутый летательный аппарат содержит, по меньшей мере, один толкающий винт (2), причем упомянутый несущий винт содержит, по меньшей мере, один винт (3), оборудованный множеством лопастей (3'), отличающийся тем, что в режиме автоматизированного пилотирования с выдерживанием угла атаки аэродинамический угол атаки (α) летательного аппарата поддерживают равным опорному углу атаки (α*) посредством автоматического управления общим шагом упомянутых лопастей (3').
2. Способ по п. 1, отличающийся тем, что автоматически управляют общим шагом упомянутых лопастей (3') для контроля вертикальной воздушной скорости летательного аппарата таким образом, чтобы поддерживать аэродинамический угол атаки летательного аппарата равным опорному углу атаки, в соответствии со следующим отношением:
α*=θ-Arc sin(VZ/TAS),
где “VZ” обозначает вертикальную воздушную скорость летательного аппарата, “TAS” обозначает истинную воздушную скорость летательного аппарата, “θ” обозначает текущий продольный наклон и “α*” обозначает опорный угол атаки.
3. Способ по п. 1, отличающийся тем, что опорный угол атаки (α*) равен текущему аэродинамическому углу атаки (α) летательного аппарата в момент запуска режима автоматизированного пилотирования с выдерживанием угла атаки.
4. Способ по любому из пп. 1-3, отличающийся тем, что значение опорного угла атаки (α*) изменяют в полете.
5. Способ по любому из пп. 1-3, отличающийся тем, что автоматически поддерживают продольный наклон (θ) равным опорному продольному наклону (θ*), при этом текущий продольный наклон равен этому опорному продольному наклону (θ*).
6. Способ по п. 5, отличающийся тем, что осуществляют автоматическое регулирование опорного продольного наклона (θ*) по текущему значению (θ) продольного наклона, когда пилот воздействует на орган продольного циклического управления (6') циклическим шагом лопастей (3') несущего винта, изменяя продольный наклон.
7. Способ по п. 5, отличающийся тем, что опорный продольный наклон сохраняют, когда пилот воздействует на орган продольного циклического управления (6') полетом, изменяя продольный наклон.
8. Способ по любому из пп. 1-3, 6, 7, отличающийся тем, что опорный угол атаки (α*) ограничивают.
9. Способ по п. 1, отличающийся тем, что на искусственный горизонт (35) выводят первый символ (31), представляющий опорный вектор воздушной скорости, чтобы пилот мог визуально контролировать опорный угол наклона траектории относительно воздуха и, следовательно, опорный угол атаки.
10. Способ по п. 9, отличающийся тем, что на упомянутый искусственный горизонт выводят второй символ (32), представляющий опорный продольный наклон (θ*).
11. Способ по любому из п. 9 или 10, отличающийся тем, что на упомянутый искусственный горизонт (35) выводят третий символ (33), представляющий текущий вектор воздушной скорости.
12. Способ по любому из п. 9 или 10, отличающийся тем, что на упомянутый искусственный горизонт (35) выводят четвертый символ (34), представляющий текущий вектор путевой скорости.
13. Способ по любому из пп. 9-10, отличающийся тем, что, когда на искусственном горизонте (35) выведен, по меньшей мере, один символ (31, 32, 33, 34) для показа опорного угла атаки, цвет упомянутого символа меняют, когда автоматическое управление общим шагом упомянутых лопастей для выдерживания упомянутого опорного угла атаки требует мощности, превышающей пороговую мощность, и опорный угол атаки (α*) автоматически меняют для соблюдения этой пороговой мощности.
14. Устройство (10) автоматического пилотирования летательного аппарата (1) с несущим винтом, при этом упомянутый летательный аппарат содержит, по меньшей мере, один толкающий винт (2), при этом упомянутый несущий винт содержит, по меньшей мере, один винт (3), оборудованный множеством лопастей (3'), при этом упомянутое устройство содержит блок (15) обработки, взаимодействующий, по меньшей мере, с цепью (7) общего управления общим шагом упомянутых лопастей (3'), отличающееся тем, что содержит средство (20) запуска режима автоматизированного пилотирования с выдерживанием угла атаки, соединенное с блоком (15) обработки, при этом упомянутый блок (15) обработки автоматически управляет общим шагом лопастей (3'), когда режим автоматизированного пилотирования с выдерживанием угла атаки включен, контролируя упомянутую цепь общего управления для поддержания аэродинамического угла атаки (α) летательного аппарата в значении опорного угла атаки (α*).
15. Устройство по п. 14, отличающееся тем, что, поскольку блок (15) обработки автоматически управляет общим шагом упомянутых лопастей (3') для контроля вертикальной воздушной скорости летательного аппарата таким образом, чтобы поддерживать аэродинамический угол атаки летательного аппарата равным опорному углу атаки согласно следующему отношению α*=θ-Arc sin(VZ/TAS), где “VZ” обозначает вертикальную воздушную скорость летательного аппарата, “TAS” обозначает истинную воздушную скорость летательного аппарата, “θ” обозначает текущий продольный наклон летательного аппарата и “α*” обозначает опорный угол атаки, упомянутое устройство содержит совокупность средств, связанных с блоком обработки, для определения вертикальной воздушной скорости летательного аппарата, истинной воздушной скорости летательного аппарата и текущего продольного наклона.
16. Устройство по любому из п. 14 или 15, отличающееся тем, что содержит средство (50) регулирования опорного угла атаки, связанное с блоком (15) обработки.
17. Устройство по любому из пп. 14-15, отличающееся тем, что содержит автоматическую систему (40) для поддержания продольного наклона летательного аппарата равным опорному наклону, при этом упомянутая автоматическая система (40) взаимодействует, по меньшей мере, с цепью продольного циклического управления (6) циклическим шагом лопастей несущего винта.
18. Устройство по любому из пп. 14-15, отличающееся тем, что содержит устройство (30) отображения, связанное с блоком (15) обработки, для отображения, по меньшей мере, одного символа, показывающего опорный угол атаки.
19. Летательный аппарат (1) с несущим винтом, содержащий, по меньшей мере, один толкающий винт, отличающийся тем, что содержит устройство (10) пилотирования по любому из пп. 14-18.
| Ротор геликоптера | 1946 |
|
SU83999A1 |
| WO 9950611 A1, 07.10.1999 | |||
| US 20100224720 A1, 09.09.2010 | |||
| US 20080237392 A1, 02.10.2008 | |||

