Настоящее изобретение касается способа содействия пилотированию, устройства содействия пилотированию и летательного аппарата, оборудованного этим устройством пилотирования.
Таким образом, изобретение относится к области приборов содействия пилотированию летательного аппарата, в частности, винтокрылого летательного аппарата.
В документе ЕР 1598720 раскрыт пилотажный индикатор, оборудованный вычислительным блоком. Вычислительный блок выводит на блок визуального отображения символ, отображающий максимальный общий угол наклона траектории летательного аппарата при наборе высоты, причем этот символ появляется в виде наложения на изображение рельефа местности.
Следует напомнить, что текущий угол наклона траектории относительно земли летательного аппарата представляет собой угол вектора путевой скорости этого летательного аппарата по отношению к плоскости нормали к направлению силы тяжести. Текущий угол наклона траектории относительно земли позволяет определять краткосрочную траекторию летательного аппарата.
Что касается общего угла наклона траектории относительно земли летательного аппарата, то он позволяет предусмотреть долгосрочную траекторию летательного аппарата относительно земли и зависит от общего энергетического баланса самолета. Общий угол наклона траектории летательного аппарата отражает моментальное ускорение на траектории этого летательного аппарата.
Следует отметить, что под общим углом наклона траектории относительно воздуха понимают долгосрочную траекторию летательного аппарата по отношению к массе воздуха, окружающего летательный аппарат.
Кроме того, среди летательных аппаратов известны винтокрылые летательные аппараты, оборудованные несущим винтом, причем этот несущий винт, в случае необходимости, может участвовать в создании тяги для движения винтокрылого летательного аппарата.
Во время медленного снижения винтокрылого летательного аппарата в особых условиях может появиться опасное явление, называемое «состоянием завихрения». Это состояние завихрения приводит к общей потере подъемной силы и управляемости.
Это явление может появляться при вертикальной воздушной скорости вертолета, меньшей первого порога, и при воздушной скорости поступательного движения, меньшей второго порога.
Таким образом, состояние завихрения является опасным. Однако пилот может выйти из этого состояния завихрения, например, либо начав поступательное движение, либо увеличив вертикальную воздушную скорость летательного аппарата, чтобы вывести этот летательный аппарат из опасной области полета.
Кроме того, среди винтокрылых летательных аппаратов известны гибридные летательные аппараты с несущим винтом, оснащенные, по меньшей мере, одним толкающим воздушным винтом. Этот воздушный винт может создавать положительную тягу, то есть в направлении от задней части летательного аппарата к передней части летательного аппарата, или отрицательную тягу, то есть в направлении от передней части летательного аппарата к задней части летательного аппарата.
При этом механическая трансмиссия, вращающая воздушный винт, может быть выполнена с ограничением, в частности, когда винт создает отрицательную тягу. Такое ограничение для удобства называют «пределом отрицательной мощности».
Это ограничение может ограничивать общий угол наклона траектории относительно земли летательного аппарата во время снижения.
Известны также документы FR2783500A1, FR2887065A1 и US4004758A.
Настоящее изобретение призвано предложить способ содействия пилотированию гибридного летательного аппарата во время снижения.
Согласно изобретению способ содействия пилотированию гибридного летательного аппарата с несущим винтом, оборудованного, по меньшей мере, одним толкающим воздушным винтом, отличается тем, что:
- определяют, по меньшей мере, один запас тяги воздушного винта между текущей тягой, создаваемой этим воздушным винтом, и пороговой тягой, соответствующей пределу отрицательной мощности, допустимому для механической трансмиссии, вращающей этот воздушный винт,
- определяют главный минимальный общий угол наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат, в зависимости от этого запаса тяги,
- на блоке визуального отображения представляют главный символ минимального общего угла наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат, причем этот главный символ зависит, по меньшей мере, от главного минимального общего угла наклона траектории относительно земли и появляется в виде наложения на изображение окружения, находящегося спереди летательного аппарата.
Под окружением, находящимся спереди летательного аппарата, следует понимать окружение, в направлении которого летательный аппарат движется при полете вперед, при этом изображением является либо символ, изображающий зону приземления, либо упомянутая зона приземления, которую непосредственно наблюдает пилот, подняв голову.
Таким образом, запас тяги отражает максимальное замедление, которое может выдержать летательный аппарат, при этом главный минимальный общий угол наклона траектории относительно земли определяют в зависимости от этого максимального замедления. При этом на блок визуального отображения выводят минимальный общий угол наклона траектории относительно земли, которому может следовать летательный аппарат. В зависимости от этой информации пилот может, например, определить, может ли быть достигнута данная зона приземления.
Способ может содержать один или несколько следующих дополнительных признаков.
Согласно варианту выполнения, для определения запаса тяги можно:
- определить текущую скорость движения летательного аппарата,
- определить текущую мощность, развиваемую воздушным винтом,
- определить текущую тягу, создаваемую воздушным винтом, используя заранее определенную первую базу данных, дающую текущую тягу в зависимости от текущей скорости движения и от текущей мощности,
- определить пороговую тягу, используя заранее определенную вторую базу данных, дающую пороговую тягу в зависимости от текущей скорости движения,
- определить запас тяги, причем этот запас тяги равен разности между текущей тягой и пороговой тягой.
В случае необходимости, скорость движения может соответствовать приборной воздушной скорости, известной под сокращением “IAS”, или скорости, называемой «истинной скоростью» и известной под сокращением “TAS”. Для более подробной информации о средствах, позволяющих определять эти скорости, можно обратиться к литературным источникам.
Кроме того, текущую мощность можно определять при помощи средства измерения момента воздушного винта и средства измерения угловой скорости вращения воздушного винта.
Первую базу данных и вторую базу данных можно получить при помощи поляр тяга/мощность воздушного винта при постоянной скорости движения.
Например, в ходе испытаний конструктор строит график с тягой, создаваемой воздушным винтом, на оси абсцисс и с мощностью, развиваемой этим воздушным винтом, на оси ординат. Этот график содержит в этом случае множество поляр, при этом каждую поляру связывают со скоростью движения летательного аппарата.
Для данной текущей мощности и данной скорости движения можно легко вывести текущую тягу.
При помощи этого графика можно затем легко сформировать базу данных.
Кроме того, конструктор устанавливает минимальную допустимую мощность. Пороговая тяга при данной скорости движения соответствует в этом случае пересечению между полярой, связанной с этой данной скоростью движения, и прямой, параллельной оси абсцисс и проходящей через упомянутую минимальную допустимую мощность.
Таким образом, конструктор может легко сформировать вторую базу данных.
Необходимо отметить, что каждая база данных может быть базой данных как таковой или любым другим эквивалентным средством, например, использующим кривые или уравнения.
Согласно другому аспекту, поскольку летательный аппарат может содержать несколько воздушных винтов, каждый из которых связан с запасом тяги, определяют главный минимальный общий угол наклона траектории относительно земли летательного аппарата при заходе на посадку в зависимости от наименьшего запаса тяги.
Например, летательный аппарат может содержать два воздушных винта, создающих разные тяги для компенсации момента, которым действует несущий винт на фюзеляж летательного аппарата. При этом первый воздушный винт обеспечивает первый запас тяги, превышающий второй запас тяги, обеспечиваемый вторым воздушным винтом. При этом главный минимальный общий угол наклона траектории относительно земли определяют в зависимости от наименьшего запаса тяги, то есть в зависимости от второго запаса тяги в данном примере.
Кроме того, главный минимальный общий угол наклона траектории относительно земли можно определить, применяя следующее отношение:
где «γmin» обозначает главный минимальный общий угол наклона траектории относительно земли, «γ» обозначает текущий угол наклона траектории относительно земли, «g» обозначает ускорение силы тяжести, «m» обозначает массу летательного аппарата, и «ΔР» обозначает упомянутый запас тяги.
Согласно первому варианту выполнения, главный символ отображает главный минимальный общий угол наклона траектории относительно земли, причем этот главный символ на экран не выводится, если скорость движения летательного аппарата меньше заранее определенного предела.
Действительно, как неожиданно выяснилось, ниже заранее определенного предела нет никакого риска достижения ограничения механической трансмиссии. Поэтому, согласно данному варианту выполнения, минимальный общий угол наклона траектории не ограничен. Следовательно, можно отменить выведение на экран главного символа.
С другой стороны, согласно второму варианту выполнения, можно определить минимальный общий угол наклона траектории относительно воздуха, чтобы избежать состояния завихрения, затем этот минимальный общий угол наклона траектории относительно воздуха преобразуют во второстепенный минимальный общий угол наклона траектории относительно земли. Главный символ отображает при этом главный минимальный общий угол наклона траектории относительно земли, если этот главный минимальный общий угол наклона траектории относительно земли превышает второстепенный минимальный общий угол наклона траектории относительно земли, причем этот главный символ отображает второстепенный минимальный общий угол наклона траектории относительно земли, если этот главный минимальный угол наклона траектории относительно земли меньше второстепенного минимального общего угла наклона траектории относительно земли.
Согласно версии выполнения, когда продольная скорость движения летательного аппарата меньше заранее определенного предела, главный символ может отображать второстепенный минимальный общий угол наклона траектории относительно земли. Если же продольная скорость движения превышает или равна заранее определенному пределу, главный символ может отображать главный минимальный общий угол наклона траектории относительно земли.
Преимуществом этой версии является сокращение рисков появления состояния завихрения.
Таким образом, посредством моделирования или летных испытаний конструктор может установить область завихрения, ограниченную кривой, дающей горизонтальную воздушную скорость летательного аппарата в зависимости от вертикальной воздушной скорости этого летательного аппарата.
При этом в ходе полета измеряют текущую горизонтальную воздушную скорость, например, используя систему, известную под сокращением LOAS, то есть “low air speed sensor” на английском языке или «датчик низкой скорости».
При этом при помощи упомянутой кривой и измеренной текущей горизонтальной воздушной скорости определяют предельную вертикальную воздушную скорость.
Из нее выводят второстепенный минимальный общий угол наклона траектории относительно земли при помощи следующего отношения
где «γair min ivortex» обозначает второстепенный минимальный общий угол наклона траектории относительно земли, «Vzair seuil» обозначает предельную вертикальную воздушную скорость, и «Vhair» обозначает текущую горизонтальную воздушную скорость.
Таким образом, понятно, что, независимо от варианта выполнения, главный символ зависит от главного минимального общего угла наклона траектории относительно земли:
- отображая в первом варианте выполнения главный минимальный общий угол наклона траектории относительно земли и
- отображая во втором варианте выполнения главный минимальный общий угол наклона траектории относительно земли или второстепенный минимальный общий угол наклона траектории относительно земли в зависимости от значения этого главного минимального общего угла наклона траектории относительно земли по отношению к значению второстепенного минимального общего угла наклона траектории относительно земли.
Согласно другому аспекту, на блоке визуального отображения можно представлять, по меньшей мере, один вспомогательный символ, выбираемый из списка, включающего в себя, по меньшей мере, один из следующих символов:
- первый вспомогательный символ, отображающий максимальный общий угол наклона траектории относительно земли, которому может следовать летательный аппарат во время набора высоты,
- второй вспомогательный символ, отображающий текущий угол наклона траектории относительно земли летательного аппарата,
- третий вспомогательный символ, отображающий взлетно-посадочную полосу.
Кроме способа, объектом изобретения является также устройство, в котором применяют этот способ.
Такое устройство содействия пилотированию гибридного летательного аппарата с несущим винтом, оборудованного, по меньшей мере, одним толкающим воздушным винтом, отличается тем, что содержит вычислительный блок и блок визуального отображения, при этом вычислительный блок исполняет записанные в памяти команды:
- для определения, по меньшей мере, одного запаса тяги воздушного винта между текущей тягой, создаваемой этим воздушным винтом, и пороговой тягой, соответствующей пределу отрицательной мощности, допустимому для механической трансмиссии, вращающей этот воздушный винт,
- для определения главного минимального общего угла наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат, в зависимости от этого запаса тяги,
- для представления на блоке визуального отображения главного символа минимального общего угла наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат, причем этот главный символ зависит, по меньшей мере, от главного минимального общего угла наклона траектории относительно земли и появляется в виде наложения на изображение окружения, находящегося спереди летательного аппарата.
Это устройство может содержать один или несколько следующих дополнительных признаков.
Так, устройство может содержать первое средство определения текущей скорости движения летательного аппарата и второе средства определения текущей мощности, развиваемой упомянутым воздушным винтом, при этом первое средство и второе средство связаны с вычислительным блоком.
Первое средство может, например, содержать трубку Пито и штуцер замера статического давления, второе средство может использовать средство измерения момента воздушного винта и датчик угловой скорости вращения этого воздушного винта.
Кроме того, устройство может содержать третье средство определения текущего угла наклона траектории относительно земли летательного аппарата. Это третье средство может содержать систему, известную под сокращением GPS (global positioning system - система глобального позиционирования) или INS (inertial navigation system - инерциальная навигационная система).
Кроме того, согласно варианту выполнения, можно определять второстепенный минимальный общий угол наклона траектории относительно земли с целью минимизации рисков появления состояния завихрения, при этом упомянутое устройство содержит датчик низкой скорости.
Наконец, объектом изобретения является гибридный летательный аппарат с несущим винтом, оборудованный, по меньшей мере, одним толкающим воздушным винтом, при этом летательный аппарат содержит заявленное устройство.
Изобретение и его преимущества будут более очевидны из нижеследующего описания примеров выполнения со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - схема летательного аппарата в соответствии с изобретением.
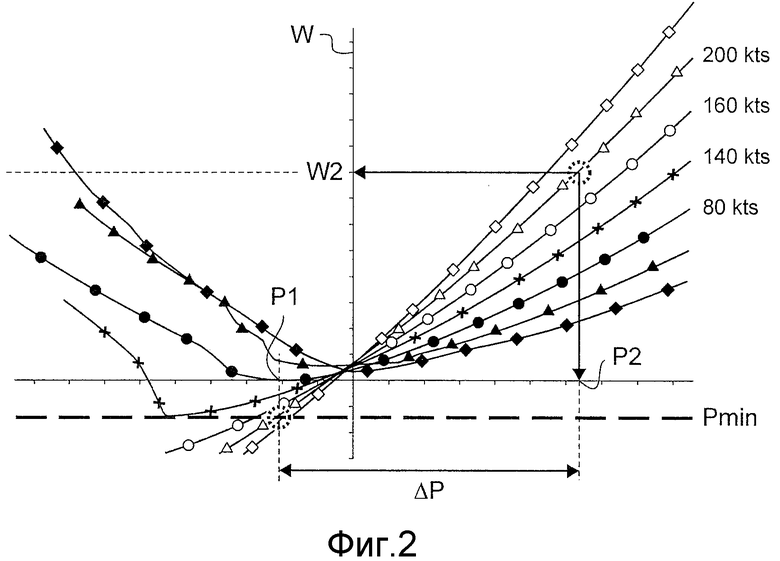
Фиг.2 - график, иллюстрирующий способ определения запаса тяги.
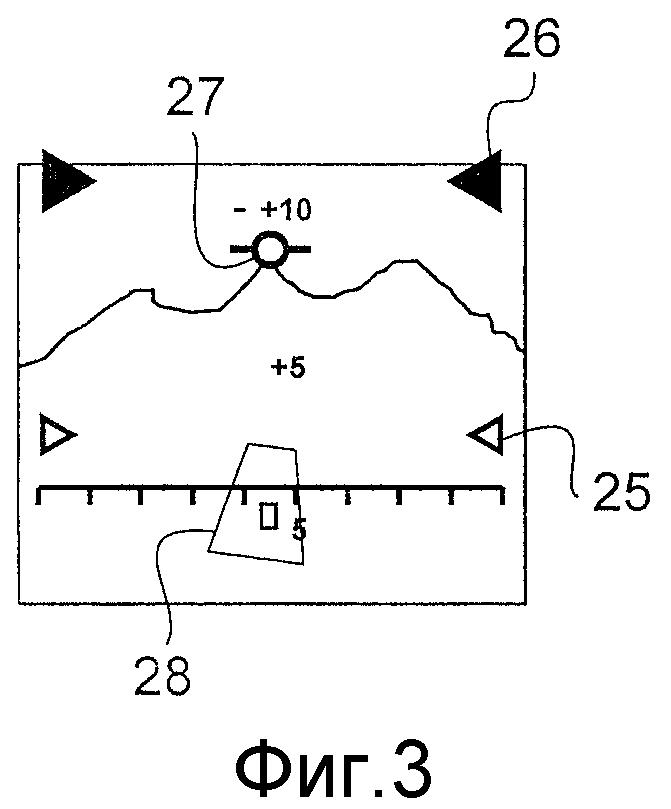
Фиг.3 и 4 - экран блока визуального отображения в разных конфигурациях полета.
На фиг.1 представлен летательный аппарат, оборудованный несущим винтом и, по меньшей мере, одним дополнительным толкающим органом, таким как толкающий воздушный винт.
Чтобы не усложнять фиг.1, на этой фиг.1 показано только устройство 5 содействия пилотированию летательного аппарата.
Это устройство 5 включает в себя вычислительный блок 10, при этом вычислительный блок содержит процессор 11 или его эквивалент и память 12. Процессор 11 исполняет команды, записанные в памяти 12, для применения способа содействия пилотированию в соответствии с изобретением.
Вычислительный блок определяет, по меньшей мере, один запас тяги ΔР каждого воздушного винта между текущей тягой Р2, создаваемой этим воздушным винтом, и пороговой тягой Р1, соответствующей пределу отрицательной мощности Pmin, заранее определенной конструктором.
Как показано на фиг.2, конструктор может строить график, отображающий на оси абсцисс тягу, создаваемую воздушным винтом, и на оси ординат мощность, развиваемую воздушным винтом.
Этот график содержит множество поляр, при этом каждая поляра соответствует текущей скорости движения, например, истинной воздушной скорости TAS.
Для данной текущей мощности W2 и для данной текущей скорости движения выводят текущую тягу Р2. Фиг.2 иллюстрирует пример летательного аппарата с текущей скоростью движения 200 узлов (Kts).
Кроме того, конструктор устанавливает предел отрицательной мощности Pmin. Пересечение между полярой, связанной с конкретной скоростью движения, и пределом отрицательной мощности Pmin позволяет установить пороговую тягу Р1, связанную с этой конкретной скоростью движения.
Например, на фиг.2 показана пороговая тяга Р1, соответствующая полету на текущей скорости движения 200 узлов (Kts).
Следует отметить, что, когда летательный аппарат совершает полет с текущей скоростью движения ниже заранее определенного предела, в данном примере предела порядка 80 узлов (Kts), предел отрицательной мощности Pmin не может быть достигнут.
При помощи этого графика конструктор может создать заранее определенную первую базу данных, дающую текущую тягу Р2 воздушного винта в зависимости от текущей скорости движения и от текущей мощности W2 воздушного винта, и заранее определенную вторую базу данных, дающую пороговую тягу Р1 воздушного винта в зависимости от текущей скорости движения летательного аппарата.
Эти базы данных могут принимать вид базы данных как таковой, файла данных, набора правил или любого эквивалентного средства.
Как показано на фиг.1, вычислительный блок 10 связан с первой базой данных 13, касающейся текущей тяги воздушного винта, и с второй базой данных 14, относящейся к пороговой тяге воздушного винта.
Кроме того, вычислительный блок 10 связан с первым средством 15 определения текущей скорости движения летательного аппарата и со вторым средством 16 определения текущей мощности W2, развиваемой этим воздушным винтом.
Для определения запаса тяги вычислительный блок 10 сообщается с первым средством 15 для определения текущей скорости движения летательного аппарата.
Кроме того, вычислительный блок 10 сообщается со вторым средством 16 для определения текущей мощности W2, развиваемой воздушным винтом.
Следовательно, вычислительный блок 10 определяет текущую тягу Р2, создаваемую воздушным винтом, используя заранее определенную первую базу данных 3, и пороговую тягу Р1, используя вторую базу данных 14.
На их основании вычислительный блок 10 выводит запас тяги ΔР, причем этот запас тяги равен разности между текущей тягой Р2 и пороговой тягой Р1.
Затем вычислительный блок 10 определяет главный минимальный общий угол наклона траектории γmin относительно земли, которому может следовать снижающийся летательный аппарат, используя этот запас тяги ΔР.
Предпочтительно вычислительный блок 10 связан также с третьим средством 17 определения текущего угла наклона траектории γ относительно земли летательного аппарата.
При этом вычислительный блок 10 определяет главный минимальный общий угол наклона траектории относительно земли, применяя следующее отношение:
где «γmin» обозначает главный минимальный общий угол наклона траектории относительно земли, «γ» обозначает текущий угол наклона траектории относительно земли, «g» обозначает ускорение силы тяжести, «m» обозначает массу летательного аппарата, и «ΔР» обозначает упомянутый запас тяги.
Если летательный аппарат содержит несколько воздушных винтов, вычислительный блок 10 может определить минимальный общий угол наклона траектории γmin относительно земли при заходе на посадку летательного аппарата в зависимости от наименьшего запаса тяги.
Кроме того, необходимо отметить, что вычислительный блок 10 связан также с блоком 20 визуального отображения, оснащенным экраном 23 визуального отображения.
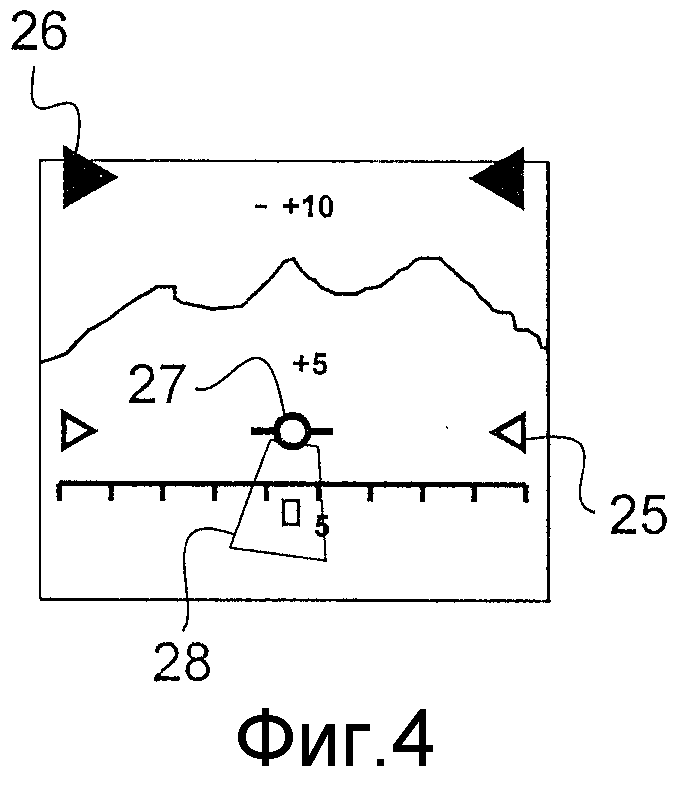
Этот блок 20 визуального отображения содержит изображение 21 окружения снаружи летательного аппарата, а также шкалу 22, градуированную в градусах.
Это изображение 21 и эту шкалу может определить во взаимодействии с обычными средствами блок 20 визуального отображения или вычислительный блок 10 и даже другой блок летательного аппарата.
При этом вычислительный блок 21 подает команду на выведение на экран 23 визуального отображения главного символа 25 минимального общего угла наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат, при этом главный символ 25 появляется в виде наложения на изображение 21 окружения, находящегося спереди летательного аппарата.
Согласно предпочтительному варианту выполнения, этот главный символ показывает значение в градусах главного минимального общего угла наклона траектории γmin относительно земли.
Согласно альтернативному варианту выполнения, вычислительный блок связан также с комплексом средств 18, содержащим датчик низкой скорости, для определения второстепенного минимального общего угла наклона траектории γ' относительно земли с целью минимизации рисков появления состояния завихрения.
Согласно этому альтернативному варианту выполнения, вычислительный блок 5 определяет второстепенный минимальный общий угол наклона траектории γ' относительно земли, чтобы избежать этого состояния завихрения.
При этом главный символ 25 показывает наименьшее значение, выбираемое между главным минимальным общим углом наклона траектории γmin относительно земли и второстепенным минимальным общим углом наклона траектории γ' относительно земли.
Независимо от варианта выполнения, вычислительный блок 5 может представлять на блоке 20 визуального отображения, по меньшей мере, один вспомогательный символ, выбираемый из списка, включающего в себя, по меньшей мере, один из следующих символов:
- первый вспомогательный символ 26, отображающий максимальный общий угол наклона траектории относительно земли, которому может следовать летательный аппарат во время набора высоты,
- второй вспомогательный символ 27, отображающий текущий угол наклона траектории относительно земли летательного аппарата,
- третий вспомогательный символ 28, отображающий взлетно-посадочную полосу.
Как показано на фиг.1, когда главный символ 25 находится под третьим символом, понятно, что летательный аппарат 1 может достичь посадочной полосы с учетом минимального допустимого угла наклона траектории относительно земли.
С другой стороны, как показано на фиг.3, главный символ 25 находится над третьим символом 28. Поскольку второй символ 27, отображающий текущий угол наклона траектории относительно земли, наоборот, находится над главным символом 25, пилот может снизить текущую скорость движения, чтобы достичь посадочной полосы.
Как показано на фиг.4, если второй символ 27 и главный символ 25 показывают одно и то же значение, у пилота не остается запаса, чтобы снизить скорость движения. Следовательно, чтобы достичь посадочной полосы, пилот должен зайти на второй круг и повторить заход на посадку.
Естественно, в настоящее изобретение можно вносить самые разные изменения в том, что касается его применения. Выше были описаны несколько вариантов выполнения, но при этом понятно, что все возможные варианты невозможно идентифицировать исчерпывающим образом. Разумеется, можно предусмотреть замену описанного средства эквивалентным средством, не выходя за рамки настоящего изобретения.
Изобретение относится к области авиации, в частности к системам управления полетом летательных аппаратов. Устройство (5) содействия пилотированию содержит вычислительный блок (10) и блок (20) визуального отображения. Вычислительный блок (10) исполняет записанные в памяти команды для определения, по меньшей мере, одного запаса тяги (ΔР) воздушного винта между текущей тягой, создаваемой этим воздушным винтом, и пороговой тягой, соответствующей пределу отрицательной мощности (Pmin), и для определения главного минимального общего угла наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат в зависимости от указанного запаса тяги (ΔР). Вычислительный блок выводит на блок (20) визуального отображения главный символ (25) минимального общего угла наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат (1), причем этот главный символ (25) появляется в виде наложения на изображение (21) окружения, находящегося спереди летательного аппарата (1), что обеспечивает безопасное снижение винтокрылого летательного аппарата. 3 н. и 9 з.п. ф-лы, 3 ил.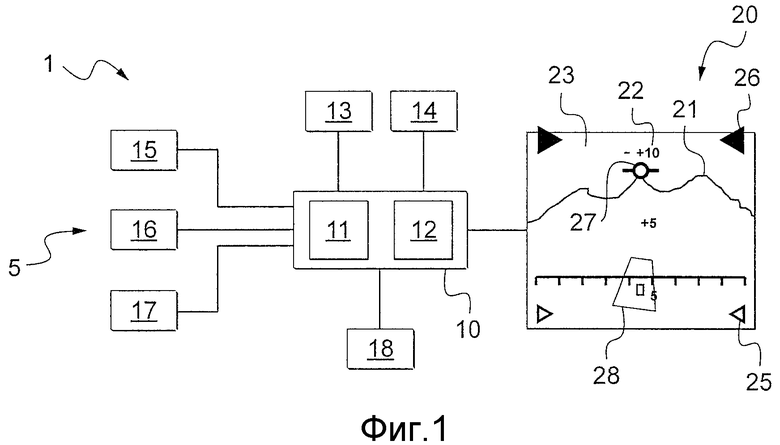
1. Способ содействия пилотированию гибридного летательного аппарата (1) с несущим винтом, оборудованного, по меньшей мере, одним толкающим воздушным винтом, отличающийся тем, что:
- определяют, по меньшей мере, один запас (ΔР) тяги упомянутого воздушного винта между текущей тягой (Р2), создаваемой этим воздушным винтом, и пороговой тягой (Р1), соответствующей пределу отрицательной мощности (Pmin), допустимому для механической трансмиссии, вращающей этот воздушный винт,
- определяют главный минимальный общий угол наклона траектории (γmin) относительно земли, которому может следовать снижающийся летательный аппарат, в зависимости от этого запаса тяги (ΔР),
- на блоке (20) визуального отображения представляют главный символ (25) минимального общего угла наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат (1), причем этот главный символ зависит, по меньшей мере, от главного минимального общего угла наклона траектории (γmin) относительно земли и появляется в виде наложения на изображение (21) окружения, находящегося перед летательным аппаратом.
2. Способ по п.1, отличающийся тем, что для определения упомянутого запаса тяги (ΔР):
- определяют текущую скорость движения летательного аппарата,
- определяют текущую мощность (W2), развиваемую упомянутым воздушным винтом,
- определяют текущую тягу (Р2), создаваемую упомянутым воздушным винтом, используя заранее определенную первую базу данных, дающую текущую тягу (Р2) в зависимости от упомянутой текущей скорости движения и от упомянутой текущей мощности (W2),
- определяют пороговую тягу (Р1), используя заранее определенную вторую базу данных, дающую упомянутую пороговую тягу в зависимости от упомянутой текущей скорости движения,
- определяют запас тяги (ΔР), причем этот запас тяги равен разности между текущей тягой (Р2) и пороговой тягой (Р1).
3. Способ по любому из пп.1-2, отличающийся тем, что, поскольку летательный аппарат (1) содержит несколько воздушных винтов, каждый из которых связан с запасом тяги, определяют главный минимальный общий угол наклона траектории (γmin) относительно земли летательного аппарата при заходе на посадку в зависимости от наименьшего запаса тяги.
4. Способ по любому из пп.1-2, отличающийся тем, что упомянутый главный минимальный общий угол наклона траектории относительно земли определяют, применяя следующее отношение:
где «γmin» обозначает главный минимальный общий угол наклона траектории относительно земли, «γ» обозначает текущий угол наклона траектории относительно земли, «g» обозначает ускорение силы тяжести, «m» обозначает массу летательного аппарата, и «ΔР» обозначает упомянутый запас тяги.
5. Способ по любому из п.1-2, отличающийся тем, что упомянутый главный символ (25) изображает главный минимальный общий угол наклона траектории (γmin) относительно земли, причем этот главный символ (25) на экран не выводится, если скорость движения упомянутого летательного аппарата меньше заранее определенного предела.
6. Способ по любому из пп.1-2, отличающийся тем, что определяют минимальный общий угол наклона траектории относительно воздуха, чтобы избежать состояния завихрения, затем этот минимальный общий угол наклона траектории относительно воздуха преобразуют во второстепенный минимальный общий угол наклона траектории (γ') относительно земли, при этом упомянутый главный символ (25) отображает главный минимальный общий угол наклона траектории (γmin) относительно земли, если этот главный минимальный общий угол наклона траектории (γmin) относительно земли превышает второстепенный минимальный общий угол наклона траектории (γ') относительно земли, при этом упомянутый главный символ (25) отображает второстепенный минимальный общий угол наклона траектории (γ') относительно земли, если этот главный минимальный угол наклона траектории (γmin) относительно земли меньше второстепенного минимального общего угла наклона траектории (γ') относительно земли.
7. Способ по любому из пп.1-2, отличающийся тем, что на блоке (20) визуального отображения представляют, по меньшей мере, один вспомогательный символ, выбираемый из списка, включающего в себя, по меньшей мере, один из следующих символов:
- первый вспомогательный символ (26), отображающий максимальный общий угол наклона траектории относительно земли, которому может следовать летательный аппарат во время набора высоты,
- второй вспомогательный символ (27), отображающий текущий угол наклона траектории относительно земли летательного аппарата,
- третий вспомогательный символ (28), отображающий взлетно-посадочную полосу.
8. Устройство (5) содействия пилотированию гибридного летательного аппарата (1) с несущим винтом, оборудованного, по меньшей мере, одним толкающим воздушным винтом, отличающееся тем, что содержит вычислительный блок (10) и блок (20) визуального отображения, при этом вычислительный блок (10) исполняет записанные в памяти команды:
- для определения, по меньшей мере, одного запаса тяги (ΔР) упомянутого воздушного винта между текущей тягой (Р2), создаваемой этим воздушным винтом, и пороговой тягой (Р1), соответствующей пределу отрицательной мощности (Pmin), допустимому для механической трансмиссии, вращающей этот воздушный винт,
- для определения главного минимального общего угла наклона траектории (γmin) относительно земли, которому может следовать снижающийся летательный аппарат, в зависимости от этого запаса тяги (ΔР),
- для представления на упомянутом блоке (20) визуального отображения главного символа (25) минимального общего угла наклона траектории относительно земли, которому может следовать снижающийся летательный аппарат (1), причем этот главный символ (25) зависит, по меньшей мере, от главного минимального общего угла наклона траектории (γmin) относительно земли и появляется в виде наложения на изображение (21) окружения, находящегося перед летательным аппаратом (1).
9. Устройство по п.8, отличающееся тем, что содержит первое средство (15) определения текущей скорости движения летательного аппарата и второе средство (16) определения текущей мощности, развиваемой упомянутым воздушным винтом, при этом первое средство (15) и второе средство (16) связаны с вычислительным блоком (10).
10. Устройство по любому из пп.8-9, отличающееся тем, что содержит третье средство (17) определения текущего угла наклона траектории (γ) относительно земли летательного аппарата (1).
11. Устройство по любому из пп. 8-9, отличающееся тем, что для определения второстепенного минимального общего угла наклона траектории (γ') относительно земли с целью минимизации рисков появления состояния завихрения, упомянутое устройство (5) содержит датчик низкой скорости.
12. Гибридный летательный аппарат (1) с несущим винтом, оборудованный, по меньшей мере, одним толкающим воздушным винтом, отличающийся тем, что содержит устройство (5) по любому из пп.8-11.
| EP 1598720 A1, 23.11.2005 | |||
| СИСТЕМА НЕЙТРОН-ЗАХВАТНОЙ ТЕРАПИИ | 2020 |
|
RU2783500C1 |
| US 4004758 A, 25.01.1977 | |||
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |

