Изобретение касается способа и устройства для пилотирования летательного аппарата. Известно, что для того чтобы помочь пилоту летательного аппарата, например транспортного самолета, надлежащим образом управлять этим летательным аппаратом, обычно обеспечивают представление на специальном индикаторе или на экране визуализации пилотажной информации [таком, например, как экран пилотажного индикатора типа PFD ("Primary Flight Display")] значений параметров, которые являются репрезентативными для динамики полета данного летательного аппарата, например скорости этого летательного аппарата. На пилотажном индикаторе PFD в этом случае обычно отображают, в дополнение к текущей скорости полета, минимальную предельно допустимую величину скорости этого летательного аппарата. Эта величина или минимально допустимая скорость (которая является переменной в функции различных параметров) соответствует максимально допустимому углу атаки, в случае превышения которого данный летательный аппарат подвергается эффекту сваливания. В том случае, когда в процессе полета необходимо выполнить тот или иной маневр, пилот имеет возможность оценить визуально располагаемый запас устойчивости между текущей скоростью полета данного летательного аппарата и его предельно допустимой скоростью. Если величина этого запаса устойчивости стремится к нулю, пилот знает, что его воздействие на ручку управления может оказаться не реализованным надлежащим образом его летательным аппаратом (вследствие опасности сваливания или приведения в действие систем защиты законов управления полетом данного летательного аппарата).
На некоторых летательных аппаратах в распоряжении пилота имеется коллиматорный индикатор типа HUD ("Head Up Display") или так называемый индикатор на лобовом стекле, на котором визуализируется направление вектора скорости данного летательного аппарата. Так, например, в патентном документе US-5808563 описан такой коллиматорный индикатор. Использование этого индикатора адаптировано главным образом для этапов взлета и посадки летательного аппарата. Однако такой индикатор обладает определенными неудобствами в процессе выполнения других фаз полета. Так, например, в процессе визуального пилотирования летательного аппарата или самолета военного назначения на малой высоте отображаемый вектор скорости, наложенный на картину внекабинного пространства, видимую пилотом через лобовое стекло, указывает точку, в направлении которой движется данный летательный аппарат, не являясь при этом репрезентативным для величины этой скорости. Таким образом, в данном случае пилот располагает инструментальной пилотажной информацией на коллиматорном индикаторе типа HUD, предназначенной для надлежащего управления самолетом в условиях, требующих повышенного внимания к внекабинному пространству (например, наличие близко расположенного рельефа местности), не отводя взгляда от внекабинного пространства, видимого через лобовое стекло. Таким образом, в этих условиях пилот располагает информацией, индицируемой на коллиматорном индикаторе типа HUD. Однако в этих условиях он не располагает информацией, отображаемой на экране пилотажного индикатора PFD. Действительно, по соображениям, с одной стороны, ясности и читаемости отображаемой информации, а с другой стороны, удовлетворительной видимости внекабинного пространства сквозь лобовое стекло, оказывается нежелательным отображать всю информацию на коллиматорном индикаторе типа HUD. В частности, текущая скорость самолета и предельная величина его скорости не могут быть индицированы так же отчетливо, как на экране пилотажного индикатора PFD. Однако в отсутствие учета реального запаса устойчивости между двумя этими величинами скорости, если пилот пытается, например, перевести самолет в набор высоты (отклоняя ручку управления "на себя") для облета расположенного в направлении полета рельефа местности при том, что этот запас устойчивости по скорости уже по существу равен нулю, самолет не сможет адекватно отреагировать на создаваемое им воздействие на ручку управления и не изменит свою траекторию желаемым образом, рискуя в этом случае столкнуться с упомянутым рельефом местности.
Техническая задача предлагаемого изобретения состоит в создании способа пилотирования летательного аппарата, позволяющего предоставить пилоту этого летательного аппарата информацию, которая важна для обеспечения надлежащего пилотирования, и устраняющего указанные выше недостатки известных способов пилотирования.
Для решения этой технической задачи в способе, в соответствии с которым на экране визуализации отображают некоторый первый характеристический символ, иллюстрирующий вектор скорости летательного аппарата, в соответствии с предлагаемым изобретением дополнительно определяют, по меньшей мере, одно значение запаса продольной устойчивости по перегрузке для данного летательного аппарата, которое выражается коэффициентом перегрузки и которое относится к одному из двух маневров этого летательного аппарата, на кабрирование и на пикирование; представляют на экране визуализации, по меньшей мере, один второй характеристический символ, который связан с упомянутым первым характеристическим символом и который иллюстрирует запас продольной устойчивости по перегрузке.
Таким образом, благодаря предлагаемому изобретению пилоту представляют величину запаса продольной устойчивости по перегрузке, которая может быть определена как разность между предельно допустимым значением и текущим значением некоторой характеристической величины для продольного движения летательного аппарата. Этот запас устойчивости по перегрузке для выполнения продольного маневра выражает, таким образом, область маневрирования, допустимую для пилота, с тем, чтобы соблюдать при этом эксплуатационные ограничения, существующие для данного летательного аппарата. Таким образом, предлагаемое изобретение адаптировано для использования коллиматорного индикатора типа HUD.
Кроме того, следует отметить, что в отличие от информации, обычно отображаемой на экране пилотажного индикатора PFD и содержащей, как было указано выше, величину запаса устойчивости по скорости, запас устойчивости по перегрузке при выполнении продольного маневра в соответствии с предлагаемым изобретением выражается коэффициентом перегрузки.
Это обстоятельство влечет за собой несколько существенных преимуществ первое из которых связано с тем, что коэффициент перегрузки в большей степени является величиной, репрезентативной для динамического поведения летательного аппарата, чем такая величина, как скорость. Таким образом, в некоторых условиях полета запас устойчивости, выраженный коэффициентом перегрузки, является более репрезентативным для запаса устойчивости данного летательного аппарата, чем запас устойчивости, выраженный скоростью; кроме того, предполагая, что в вычислениях, приводящих к установлению запаса устойчивости по перегрузке, используются приближения, состоящие в линеаризации уравнений механики полета в ближайшей окрестности мгновенных условий полета данного летательного аппарата, погрешности, связанные с этими приближениями, оказываются меньшими в том случае, когда запас устойчивости вычисляется в виде коэффициента перегрузки, чем в том случае, когда этот запас устойчивости вычисляется в виде устойчивости по скорости;
- еще одно преимущество, проявляющееся в процессе использования коллиматорного индикатора типа HUD, является следствием того, что отображение на этом индикаторе типа HUD реализуется в плоскости, которая является перпендикулярной по отношению к продольной оси данного летательного аппарата. Таким образом, оказывается более эргономичным располагать значением запаса устойчивости по перегрузке, выраженным в виде коэффициента перегрузки Nz, то есть коэффициента перегрузки вдоль вертикальной оси, которая по существу расположена в плоскости индикатора типа HUD, нежели располагать значением запаса устойчивости по скорости, которое соответствует информации вдоль продольной оси, перпендикулярной плоскости этого индикатора типа HUD;
- в то же время, в том случае, когда рычаги управления данного летательного аппарата таковы, что заданные значения параметров, вводимые пилотом посредством ручки управления, выражаются вдоль вертикальной оси в виде коэффициента перегрузки, запас продольной устойчивости по перегрузке также представляет преимущество однородности с воздействиями пилота на эту ручку управления.
Предпочтительно определяют два значения запаса продольной устойчивости по перегрузке, которые относятся соответственно к маневру на кабрирование и маневру на пикирование данного летательного аппарата и представляют два соответствующих вторых характеристических символа на экране визуализации.
Кроме того, и также предпочтительно отображают этот второй характеристический символ на экране визуализации таким образом, чтобы расстояние между первым и вторым характеристическими символами было пропорционально имеющемуся запасу продольной устойчивости по перегрузке.
В конкретном способе реализации предлагаемого изобретения определяют в качестве запаса продольной устойчивости по перегрузке наиболее критический запас устойчивости по перегрузке между первым значением запаса устойчивости по коэффициенту перегрузки и вторым значением этого запаса устойчивости.
В этом случае, во-первых, для определения запаса устойчивости по перегрузке, относящегося к маневру на кабрирование, второй запас устойчивости предпочтительно соответствует запасу устойчивости по углу атаки Δα.
Предпочтительно вычисляют этот запас устойчивости по углу атаки Δα на основе следующего выражения:

в котором:
- Nz представляет собой коэффициент перегрузки;
- ΔNmax представляет собой максимальную индицируемую величину запаса устойчивости по перегрузке;
- α представляет собой угол атаки;
- αmax представляет собой максимальный угол атаки;
- α0 представляет собой угол атаки, соответствующий нулевой подъемной силе.
Кроме того, и во-вторых, для определения запаса устойчивости по перегрузке, относящегося к маневру на пикирование, этот второй запас устойчивости предпочтительно соответствует запасу устойчивости по скорости ΔV.
Поставленная задача решается также тем, что в способе пилотирования летательного аппарата, в котором отображают на экране визуализации первый характеристический символ, иллюстрирующий вектор скорости летательного аппарата, согласно изобретению дополнительно определяют, по меньшей мере, одно значение запаса продольной устойчивости по перегрузке летательного аппарата, которое выражается коэффициентом перегрузки и которое относится к одному из двух маневров этого летательного аппарата, на кабрирование и на пикирование, и отображают на экране визуализации, по меньшей мере, один второй характеристический символ, который связан с первым характеристическим символом и который иллюстрирует значение запаса продольной устойчивости по перегрузке, причем второй характеристический символ отображают на экране визуализации только в том случае, когда имеющийся запас продольной устойчивости по перегрузке оказывается меньше некоторого предварительно определенного значения.
Предлагаемое изобретение относится также к устройству для пилотирования летательного аппарата, которое обеспечивает возможность осуществления описанного выше способа.
В соответствии с предлагаемым изобретением упомянутое выше устройство содержит:
- вычислительные средства, предназначенные для определения вектора скорости летательного аппарата;
- средства индикации, предназначенные для отображения на экране визуализации первого характеристического символа, иллюстрирующего вектор скорости данного летательного аппарата,
и отличается тем, что это устройство дополнительно содержит вспомогательные вычислительные средства, предназначенные для определения по меньшей мере одного значения продольного запаса устойчивости по перегрузке для данного летательного аппарата, которое выражается коэффициентом перегрузки и которое относится к одному из двух маневров этого летательного аппарата на кабрирование и на пикирование, причем средства индикации дополнительно отображают на экране визуализации по меньшей мере один второй характеристический символ, который связан с первым характеристическим символом и который иллюстрирует упомянутое значение запаса продольной устойчивости по перегрузке.
Предпочтительно вспомогательные вычислительные средства содержат:
первые средства, предназначенные для определения запаса продольной устойчивости по перегрузке, который относится к маневру данного летательного аппарата на кабрирование;
вторые средства, предназначенные для определения запаса продольной устойчивости по перегрузке, который относится к маневру данного летательного аппарата на пикирование.
Кроме того, предлагаемое изобретение относится также к летательному аппарату, в частности транспортному самолету, который оборудован предложенным устройством для пилотирования описанного выше типа.
Приведенные в приложении фигуры поясняют способ реализации предлагаемого изобретения. На этих фигурах идентичные цифровые позиции обозначают подобные друг другу элементы предлагаемого изобретения.
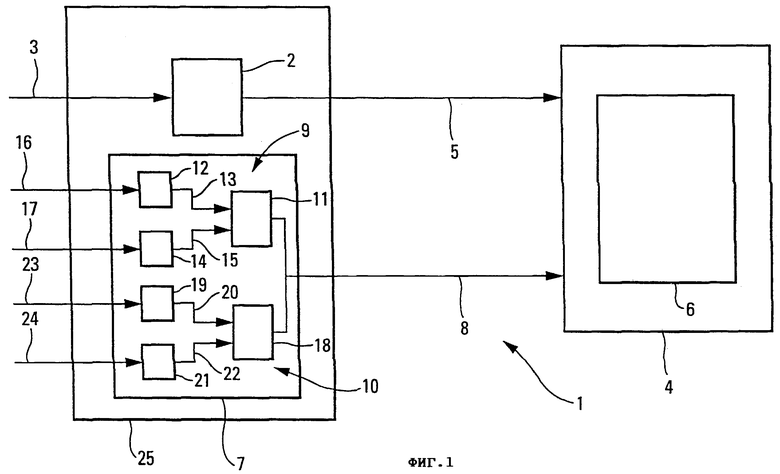
Фиг.1 представляет собой блок-схему устройства для пилотирования летательного аппарата в соответствии с предлагаемым изобретением.
Фиг.2 и 3 демонстрируют пример отображения на экране визуализации характеристических символов, которые иллюстрируют запасы продольной устойчивости по перегрузке, относящиеся соответственно к маневрам данного летательного аппарата на кабрирование и на пикирование.
Устройство 1 в соответствии с предлагаемым изобретением, схематически изображенным на фиг.1, установлено на борту летательного аппарата, например транспортного самолета, не показанного на фигурах, и предназначено для содействия пилоту этого летательного аппарата в осуществлении надлежащего пилотирования.
Это устройство 1 обычно содержит:
- средства 2 обычного типа, которые принимают информацию по линии связи 3 и которые обычным образом вычисляют значение вектора скорости данного летательного аппарата;
- средства индикации 4, которые соединены при помощи линии связи 5 со средствами 2 для того, чтобы обычным образом обеспечить отображение на экране визуализации 6 первого характеристического символа S1 (показанного на фиг.2 и 3), который иллюстрирует вектор скорости данного летательного аппарата.
В соответствии с предлагаемым изобретением:
- устройство 1 дополнительно содержит вспомогательные средства 7, предназначенные для определения, по меньшей мере, одного значения запаса продольной устойчивости данного летательного аппарата по перегрузке, которое выражается коэффициентом перегрузки Nz и которое относится к одному из двух маневров этого летательного аппарата на кабрирование и на пикирование. В рамках предлагаемого изобретения запас продольной устойчивости по перегрузке может быть определен как разность между предельно допустимым значением и текущим значением некоторой характеристической величины продольного движения данного летательного аппарата. Этот запас продольной устойчивости по перегрузке выражает, таким образом, доступную для пилота область маневра при соблюдении эксплуатационных ограничений для данного летательного аппарата. В соответствии с предпочтительным способом реализации предлагаемого изобретения средства 2 и вспомогательные средства 7 сгруппированы в одном и том же центральном вычислительном блоке 25;
- средства индикации 4 дополнительно обеспечивают отображение на экране визуализации 6 по меньшей мере одного второго характеристического символа S2, S3 (эти символы представлены на фиг.2 и 3), который связан с первым характеристическим символом S1 и который иллюстрирует запас продольной устойчивости по перегрузке.
Запас продольной устойчивости по перегрузке, который в соответствии с предлагаемым изобретением выражается в виде коэффициента перегрузки Nz, представляет многочисленные преимущества, в частности:
- наилучшую репрезентативность возможностей динамического поведения данного летательного аппарата;
- однородность по отношению к определенным воздействиям пилота на рычаги управления данным летательным аппаратом;
- упрощение вида индикации, поскольку в данном случае запас продольной устойчивости по перегрузке определяется в плоскости экрана визуализации 6.
В соответствии с предлагаемым изобретением упомянутые вспомогательные вычислительные средства 7 содержат:
- первые средства 9, предназначенные для определения запаса продольной устойчивости по перегрузке, который относится к маневру данного летательного аппарата на кабрирование и который отображается при помощи второго характеристического символа типа S2 (см. фиг.2);
- вторые средства 10, предназначенные для определения запаса продольной устойчивости по перегрузке, который относится к маневру данного летательного аппарата на пикирование и который отображается при помощи второго характеристического символа типа S3 (см. фиг.3).
В соответствии с предпочтительным способом реализации, проиллюстрированным на фиг.2 и 3:
первый характеристический символ S1, иллюстрирующий вектор скорости данного летательного аппарата, отображается символом в виде ромба;
и второй характеристический символ S2, S3, иллюстрирующий запас продольной устойчивости по перегрузке, отображается в форме шеврона или угловой скобки, которая расположена выше (для кабрирования) или ниже (для пикирования) по отношению к первому характеристическому символу S1.
Кроме того, в соответствии с предлагаемым изобретением каждый второй характеристический символ S2, S3 отображается на экране визуализации 6 таким образом, чтобы расстояние D1, D2 между первым характеристическим символом S1 и этим вторым характеристическим символом S2, S3 было пропорциональным соответствующему запасу продольной устойчивости по перегрузке, определенному при помощи вспомогательных средств 7.
Таким образом, в соответствии с предлагаемым изобретением:
- расстояние D1 (см. фиг.2) между характеристическими символами S1 и S2 пропорционально запасу продольной устойчивости по перегрузке, относящемуся к маневру данного летательного аппарата на кабрирование;
- и расстояние D2 (см. фиг.3) между характеристическими символами S1 и S3 пропорционально запасу продольной устойчивости по перегрузке, относящемуся к маневру данного летательного аппарата на пикирование.
В то же время, как показано на фиг.2, на экране визуализации 6 второй характеристический символ S2 отображают только в том случае, если запас продольной устойчивости по перегрузке оказывается меньше некоторого предварительно определенного значения ΔNmax (проиллюстрированного на этой фиг.2 угловой скобкой S0, показанной пунктиром), то есть только в том случае, если расстояние D1 оказывается меньше предварительно определенного расстояния D3.
Средства 9, предназначенные для определения запаса продольной устойчивости по перегрузке, относящегося к маневру на кабрирование, имеют в своем составе средства 11, предназначенные для определения в качестве фактического запаса продольной устойчивости по перегрузке наиболее критического запаса устойчивости по перегрузке между:
- первым значением запаса устойчивости по коэффициенту перегрузки ΔNzc, определяемым при помощи вычислительного средства 12 и принимаемым по линии связи 13;
- и вторым значением запаса устойчивости по углу атаки Δα, определяемым при помощи вычислительного средства 14 и принимаемым по линии связи 15.
Разумеется, как уже было указано выше, в соответствии с предлагаемым изобретением оба эти значения запаса устойчивости ΔNzc и Δα выражены в виде соответствующего коэффициента перегрузки Nz.
Средства 11, которые учитывают в каждый момент времени наиболее критическое значение запаса устойчивости, обеспечивают, таким образом, выбор наименьшего из двух этих значений имеющегося запаса устойчивости.
Кроме того, как уже было указано выше, располагаемое значение запаса устойчивости на выходе из этих средств 11 отображается при помощи средств визуализации 4 только в том случае, если это значение запаса устойчивости оказывается меньше значения ΔNmax (угловая скобка S0 на экране визуализации). Это позволяет не перегружать поле отображения на экране визуализации в том случае, когда имеющийся запас устойчивости является достаточным для того, чтобы данный летательный аппарат имел возможность маневрировать безопасности ограничений, связанных с коэффициентом перегрузки Nz или с углом атаки α.
Запас устойчивости по коэффициенту перегрузки ΔNzc, который определяется при помощи вычислительного средства 12 на основе информации, принимаемой по линии связи 16, представляет собой разность между максимально допустимым коэффициентом перегрузки Nzmax и текущим коэффициентом перегрузки Nz. Для того чтобы быть надлежащим образом отображенной на экране визуализации 6, эта разность, разумеется, подвергается соответствующему масштабированию.
Предпочтительным образом для вычисления отображаемой величины ΔNzc используют следующую формулу:

В данном случае предполагается, что отображаемое значение ΔNzc равно 0 в том случае, когда запас устойчивости равен максимальной отображаемой величине ΔNmах (характеристический символ S2, представляющий запас устойчивости, в максимально возможной степени удален от характеристического символа S1, представляющего вектор скорости, и находится в положении, соответствующем положению символа S3), и это значение равно 1 в том случае, когда запас устойчивости является нулевым (характеристический символ S2, представляющий запас устойчивости, при этом находится на характеристическом символе S1, представляющем вектор скорости на экране визуализации 6).
Что касается запаса устойчивости по углу атаки Δα, который определяется при помощи вычислительного средства 14 на основе информации, поступающей по линии связи 17, то он представляет собой разность между максимально допустимым углом атаки αmах и текущим углом атаки α.
Как уже было указано выше, для того чтобы быть надлежащим образом отображенной на экране визуализации 6, эта разность прежде всего преобразуется в коэффициент перегрузки Nz, а затем подвергается соответствующему масштабированию.
Записывая прежде всего уравнение подъемной силы данного летательного аппарата для углов атаки α и αmax получают следующие выражения:

где:
- М представляет собой массу данного летательного аппарата;
- g представляет собой ускорение силы тяжести;
- ρ представляет собой плотность воздуха;
- s представляет собой площадь опорной поверхности данного летательного аппарата (крыла);
- V представляет собой скорость данного летательного аппарата по отношению к воздуху;
- Czα представляет собой градиент подъемной силы;
- и α0 представляет собой угол атаки, соответствующий нулевой подъемной силе,
откуда может быть выведено следующее выражение:
Аналогично по отношению к величине ΔNzc можно определить значение Δα при помощи следующего уравнения, которое учитывает соответствующее масштабирование:

Заменяя величину Nz (αmax) на величину, полученную из предшествующего уравнения, получают:

Как и в предшествующем изложении, относившемся к величине ΔNzc, индицируемое значение Δα равно 0 в том случае, когда запас устойчивости равен максимальной величине ΔNmax (характеристический символ S2, представляющий этот запас устойчивости, удален в максимально возможной степени от характеристического символа S1, представляющего вектор скорости на экране визуализации 6, и располагается в положении, соответствующем положению характеристического символа S3), и это индицируемое значение равно 1 в том случае, когда упомянутый запас устойчивости является нулевым (при этом характеристический символ S2, представляющий имеющийся запас устойчивости, касается характеристического символа S1, представляющего вектор скорости на экране визуализации 6).
Предпочтительно, но не исключительно, значение αmax [которое зависит, в частности, от значения числа Маха и от полетной конфигурации данного летательного аппарата (положение закрылков и т.п.)] поступает из вычислительного устройства, не показанного на приведенных в приложении фигурах и установленного на борту данного летательного аппарата, причем это вычислительное устройство в то же время использует или выдает упомянутое значение и для других применений (алгоритмы пилотирования, система управления полетом и т.п.).
В соответствии с предпочтительным способом реализации предлагаемого изобретения, касающимся гражданского или военного транспортного самолета, значение параметра ΔNmax принимают равным 0,5 g, причем в этом случае значение параметра Nzmax по существу составляет 2,5 g или 2 g в зависимости от конфигурации данного летательного аппарата.
В то же время средства 10, предназначенные для определения запаса продольной устойчивости по перегрузке, относящегося к маневру на пикирование, содержат средства 18, предназначенные для определения в качестве этого запаса продольной устойчивости по перегрузке, наиболее критичного между:
- первым значением запаса устойчивости по коэффициенту перегрузки ΔNzp, определяемым при помощи вычислительных средств 19 и принимаемым по линии связи 20;
- и вторым значением запаса устойчивости по скорости ΔV, определяемым при помощи вычислительного средства 21 и принимаемым по линии связи 22.
Разумеется, как уже было указано выше, в соответствии с предлагаемым изобретением оба значения этих запасов устойчивости ΔNzp и ΔV выражаются в виде коэффициента перегрузки Nz.
Средства 18, которые учитывают в каждый момент времени наиболее критическое значение запаса устойчивости, обеспечивают, таким образом, выбор наименьшего из двух упомянутых выше значений запасов устойчивости.
Кроме того, как уже было указано выше, располагаемый запас устойчивости на выходе из средств 18 отображается средствами визуализации 4 только в том случае, если он меньше значения ΔNmах. Это позволяет не перегружать поле отображения в том случае, когда этот запас устойчивости является достаточным для обеспечения возможности маневрирования данного летательного аппарата без риска реализации имеющихся ограничений.
Запас устойчивости по коэффициенту перегрузки ΔNzp (для маневра на пикирование), который определяется при помощи вычислительного средства 19 на основе информации, получаемой по линии связи 23, вычисляется аналогично упомянутому выше запасу устойчивости ΔNzc (для маневра на кабрирование), с использованием следующего выражения:

В то же время запас устойчивости по скорости ΔV, который определяется при помощи вычислительного средства 21 на основе информации, принимаемой по линии связи 24, представляет собой разность между максимально допустимой скоростью Vmax и текущей скоростью V данного летательного аппарата. Таким же образом, как и для запаса устойчивости по углу атаки Δα, и для того, чтобы быть надлежащим образом отображенной на экране визуализации 6, эта разность прежде всего подвергается преобразованию в коэффициент перегрузки Nz, а затем подвергается соответствующему масштабированию. Упомянутое выше преобразование обеспечивается путем использования уравнения, которое позволяет вычислить минимальный коэффициент перегрузки (который можно обозначить символом NzminV, с тем чтобы отличать это параметр от параметра Nzmin), в функции, с одной стороны, расхождения между текущей скоростью V данного летательного аппарата и скоростью, подлежащей достижению (Vcible), а с другой стороны, упреждающего слагаемого, представляющего собой функцию производной скорости. Это уравнение в данном случае имеет следующий вид:
NzminV=Кр(V-Vcible)+Kd(dV/dt).
В рассмотренном случае искомая скорость (Vcible) может быть принята скоростью Vmax и, следовательно, уравнение, позволяющее осуществить преобразование в коэффициент перегрузки, принимает вид:
NzminV=-Кр(Vmax-V)+Kd(dV/dt).
Аналогично параметру ΔNzp определяют параметр ΔV при помощи следующего уравнения, которое учитывает масштабирование этого параметра:
Интегрируя в этом уравнении величину NzminV, получаемую из предыдущего уравнения, получают формулу, дающую значение ΔV:

Устройство (1) для пилотирования летательного аппарата (ЛА) содержит средства (2), предназначенные для определения вектора скорости ЛА, средства индикации (4), предназначенные для отображения на экране визуализации (6) первого характеристического символа, иллюстрирующего вектор скорости данного ЛА, и вспомогательные средства (7), предназначенные для определения по меньшей мере одного значения запаса продольной устойчивости по перегрузке этого ЛА, которое выражается коэффициентом перегрузки и которое относится к одному из двух маневров этого ЛА на кабрирование или на пикирование. Кроме того, средства индикации (4) отображают на экране визуализации (6) по меньшей мере один второй характеристический символ, который связан с первым характеристическим символом и который иллюстрирует запас продольной устойчивости по перегрузке. Изобретение обеспечивает надежность и безопасность пилотирования ЛА путем предоставления пилоту этого ЛА информации, которая важна для обеспечения надлежащего пилотирования. 4 н. и 7 з.п. ф-лы, 3 ил.
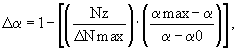
в котором Nz представляет собой коэффициент перегрузки;
ΔNmах представляет собой максимальную индицируемую величину запаса устойчивости по перегрузке;
α представляет собой угол атаки;
αmах представляет собой максимальный угол атаки;
α0 представляет собой угол атаки, соответствующий нулевой подъемной силе.
| US 5808563 А, 15.09.1998 | |||
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| US 3781628 А, 25.12.1973 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1826438A1 |

