Изобретение относится к ручному управлению рулями высоты и направления, элеронами или элевонами самолетов малого класса и других летательных аппаратов с аэродинамическими поверхностями управления.
Известно ручное управление самолетами, см., например, пат №2410286. Однако взлетная и посадочная скорости самолета в 3-4 раза меньше максимальной. Поэтому на больших скоростях полета отклонение руля или элерона (далее «управляемый элемент») на тот же угол, что и на малых скоростях, приводит к увеличению усилия на элементе управления в 9-16 раз (пропорционально квадрату скорости). Это означает, что на малых скоростях летчику приходится делать размашистые, амплитудные движения штурвалом, рычагом управления или педалями (далее «орган управления»), а на максимальной скорости даже небольшое отклонение органа управления вызывает резкую реакцию самолета.
Известно бустерное управление самолетом через пружину, установленную между органом управления и бустером, см. а.с. СССР №474208.
Задача и технический результат изобретения - адекватная реакция самолета на одинаковое управляющее движение летчика во всем диапазоне летных скоростей при ручном управлении без применения бустеров.
Для этого управляющий орган соединен с управляемым элементом через одну или две пружины, расположенные у органа управления, или у управляемого элемента, или на элементах соединяющей их кинематики. Причем если применены две пружины, то они при нейтральном положении органа управления должны находиться в положении половины рабочего хода (сжатия или растяжения), чтобы не провисали тросы управления.
Одна пружина в этом устройстве должна работать и на сжатие, и на растяжение. Поэтому устройство получится надежнее, если использовать две пружины, причем работающие на сжатие. Поломка пружины в этом случае не приведет к отказу управления, как было бы в случае пружин растяжения и может даже остаться незамеченной летчиком - в месте поломки сломанный виток упрется в следующий, и пружина будет продолжать работать, хотя и с несколько меньшим усилием. Чтобы при этом витки пружины постепенно не вкручивались друг в друга, концы пружины надо зафиксировать от поворота Проще всего это сделать с помощью зуба на концах пружины, отогнутого параллельно оси пружины и от нее.
В такой системе управления одинаковое отклонения органа управления на разных скоростях приводит не к отклонению управляемых элементов на одинаковый угол, а к появлению примерно одинакового усилия на них (чем длиннее пружина, тем это заметнее). То есть летчик знает, что отклонение органа управления на определенный угол всегда приведет к одному и тому маневру, что особенно важно для начинающего пилота.
Но при отклонении, большем рабочего хода пружин, управление превращается в обычное - то есть последующее отклонение приводит к пропорциональному отклонению управляемого элемента. Это - режим энергичных маневров. Можно порекомендовать рабочий ход пружин выбрать 50-70% от всего рабочего хода органа управления.
Применение данной системы позволит точнее управлять самолетом на больших скоростях, что особенно важно при групповом пилотировании и при необходимости других точных маневров на максимальной или крейсерской скоростях (аэрофотосъемка, опрыскивание полей и т.п.). Точнее станет управление и на малых скоростях.
Очень важное качество такой системы управления - склонность к саморегулированию Допустим, налетел порыв встречного ветра, то есть временно резко увеличилась воздушная скорость самолета. С обычным управлением самолет резко увеличил бы тангаж (эффект воздушных ям). А в данной системе рули высоты сами повернутся так, что усилие на них останется почти постоянным. А после окончания порыва ветра вернутся в исходное положение. То же самое, только наоборот, будет и в более опасном случае - при попутном порыве ветра, что особенно опасно на бреющем полете и при ЗГО (заднем горизонтальном оперении) из-за наличия просадки. Полного саморегулирования получить не удастся, однако эффект воздушных ям станет менее выраженным.
Усилие пружин рассчитывается так, чтобы на малых скоростях при предельном отклонении органа управления они деформировались лишь на 1/9-1/15 своей полудлины, то есть примерно на 5% рабочего хода. Ход органа управления даже при полностью сжатой пружине должен быть достаточным для полного хода управляемого элемента на оптимальный угол.
На фиг.1 показана система управления тангажом: рычаг управления 1 закреплен в шарнире 2, имеет на конце вилку и соединен с двумя цилиндрами 3 (цилиндр может быть один, два цилиндра показаны для наглядности). В цилиндрах имеются пружины 4, наполовину поджатые поршнями 5 со штоками 6. К штокам непосредственно и через двуплечий рычаг 7 присоединены тросы управления 8, идущие к рулю высоты. Так как пружины находятся в состоянии половинного сжатия, то на штоках имеются определенные усилия, натягивающие тросы управления.
Работает система управления так: при отклонениях рычага 1 цилиндры смещаются влево или вправо на чертеже, и на штоках 6 появляется разница усилий, передающаяся на рули высоты. Это усилие почти не зависит от скорости полета, что определяет адекватную реакцию управления на действия летчика. Но при полном сжатии одной из пружин (вторая пружина при этом распрямляется и почти доходит до торца цилиндра) управление превращается в пропорциональное, то есть летчик может совершить резкий маневр.
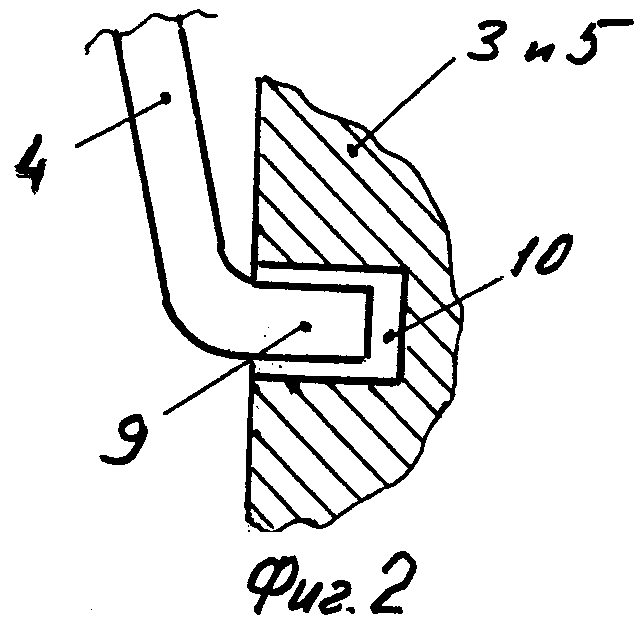
На фиг.2 показана пружина 4, концы которой зафиксированы от прокручивания с помощью зуба 9, входящего в паз 10 на поршне и цилиндре. Паз должен быть заметно больше диаметра прутка пружины, иначе при деформациях зуб обломится.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАРИАТИВНОЕ РУЧНОЕ УПРАВЛЕНИЕ САМОЛЕТОМ (ВАРИАНТЫ) | 2012 |
|
RU2505456C1 |
| УПРАВЛЕНИЕ "УТКА" -2 /ВАРИАНТЫ/ | 2012 |
|
RU2515817C2 |
| МЕХАНИЗМ КОМПЕНСАЦИИ УСИЛИЙ УПРАВЛЕНИЯ | 2012 |
|
RU2515820C2 |
| САМОЛЕТ ДЛЯ ПОСАДКИ ПРИ БОКОВОМ ВЕТРЕ (ВАРИАНТЫ) | 2008 |
|
RU2400398C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2420427C2 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| СИСТЕМА СПАСЕНИЯ САМОЛЕТА /ВАРИАНТЫ/ | 2006 |
|
RU2336203C2 |
| СПОСОБ ПОСАДКИ САМОЛЕТА ПРИ БОКОВОМ ВЕТРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2466445C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |

Адаптивное ручное управление самолетом относится к авиационной технике, в частности к системам ручного управления. Управляющий орган соединен с управляемым элементом посредством двух пружин, расположенных у органа управления, или у управляемого элемента, или на элементах соединяющей их кинематики. Пружины при нейтральном положении органа управления находятся в положении половины рабочего хода и зафиксированы от поворота с помощью зуба на концах пружины. Достигается повышение точности управления самолетом. 2 з.п. ф-лы, 2 ил.
1. Адаптивное ручное управление самолетом, содержащее органы управления, тяги и управляемые элементы, отличающееся тем, что управляющий орган соединен с управляемым элементом через две пружины, расположенные у органа управления, или у управляемого элемента, или на элементах соединяющей их кинематики.
2. Управление по п.1, отличающееся тем, что две пружины при нейтральном положении органа управления находятся в положении половины рабочего хода.
3. Управление по п.1, отличающееся тем, что концы пружин зафиксированы от поворота, например, с помощью зуба на концах пружины, отогнутого параллельно оси пружины и от нее.
| СИСТЕМА УПРАВЛЕНИЯ ЗАКРЫЛКАМИ САМОЛЕТА | 1992 |
|
RU2065377C1 |

