Изобретение относится к весоизмерительной технике и может быть использовано при проведении поверки весов, их калибровки или испытаний на утверждение типа.
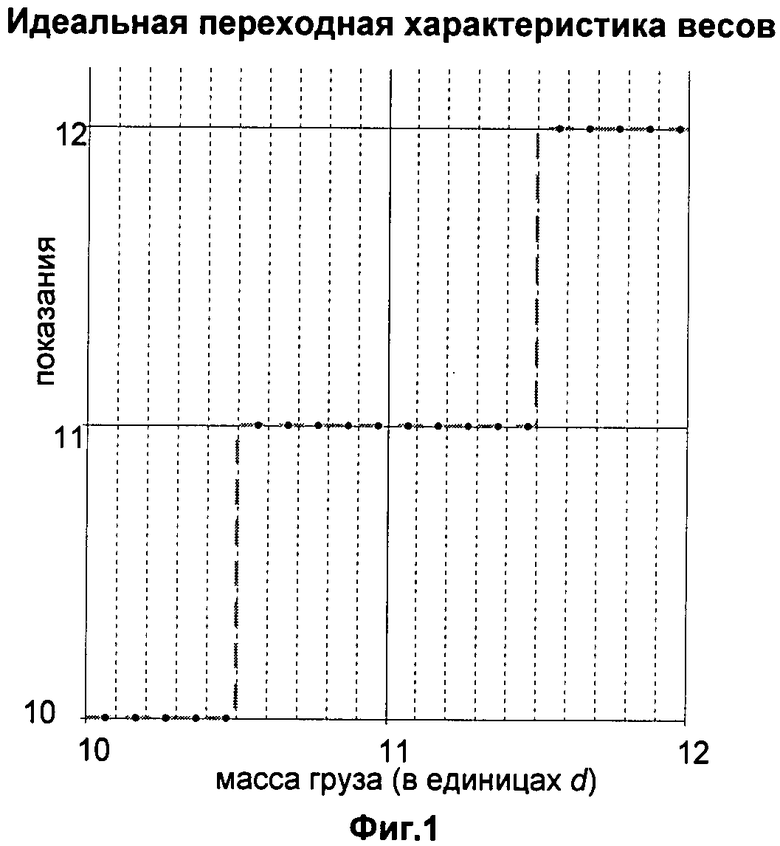
Известен способ определения погрешности весов с цифровой индикацией, заключающийся в том, что устанавливают на весы эталонный груз, считывают показание и определяют погрешность весов по разности между показанием и номинальной массой эталонного груза [1]. Но данный способ не обладает высокой точностью, так как она ограничена погрешностью округления ±d/2 при оцифровывании сигнала от тензодатчика, где d - это дискретность шкалы весов. Фиг.1 иллюстрирует в виде пунктирной линии т.н. идеальную переходную характеристику весов, описывающую связь между точным значением массы груза (ось абсцисс) и показанием весов (ось ординат). Здесь начало отсчета по оси абсцисс 10 d выбрано условно и может быть заменено на любое другое. Идеализация заключается в том, что если шумы перехода, связанные с АЦП, тензодатчиком, механическими вибрациями и пр., достаточно малы относительно d, то указанная связь практически всегда будет однозначной. Это значит, что после того как груз любой массы был положен на весы и нагрузка стабилизировалась, показания остаются фиксированными на определенном значении без каких-либо мельканий. Обычно на этапе разработки весов дискретность выбирают настолько большой, что эффект неустойчивости не проявляется.
Известен также способ определения погрешности весов с цифровой индикацией, заключающийся в том, что устанавливают на весы эталонный груз, считывают начальное показание, последовательно добавляют гири, массу которых mд выбирают существенно меньше дискретности d, подсчитывают число N гирь, при котором показание возрастет на 1 d в результате прохождения через полуцелое значение, определяют погрешность весов по разности между номинальной массой груза, увеличенной на d/2, и начальным показанием, увеличенным на N*mд [2].
Пусть на фиг.1 одна из точек на оси абсцисс, например вторая, обозначает возможное значение массы груза, которое и требуется определить. Исходное показание весов для этого груза равно 10 (здесь и далее показания приводятся в относительных единицах d), и единственное, что следует из алгоритма округления - это что искомая масса меньше 10,5 (но больше 9,5). Добавляя первые 3 гири массой mд =0,1, получим то же самое показание 10, но возможный верхний предел на искомую массу будет смещаться до 10,4, 10,3 и 10,2, т.е. пока выполняется округление вниз. Но начиная с 4-й гири, показание изменится на 11 согласно округлению вверх, поэтому N=4 и погрешность равна (10+4·0,1)-(10+1/2)=-0,1. Действительно, выбранная точка лежит примерно на расстоянии 0,1 d от начального показания.
Этот способ выбран в качестве прототипа изобретения как наиболее близкий к нему по технической сущности и достигаемому результату. Недостатком прототипа является то, что он может быть использован лишь в том случае, когда случайная погрешность измерения, связанная с шумами перехода, существенно меньше, чем масса каждой дополнительной гири [3]. Иначе показание в окрестности полуцелого значения нагрузки оказывается неустойчивым, изменяясь многократно: в процессе добавления гирь сначала происходят только редкие переходы с приращением показания и возвратом в исходное состояние, затем оба состояния оказываются равновероятными, затем большей частью реализуется увеличенное показание, а при выходе из окрестности полуцелого значения оно оказывается постоянным.
Целью предлагаемого изобретения является устранение вышеуказанного недостатка.
В предлагаемом способе устанавливают на весы эталонный груз, считывают начальное показание, последовательно добавляют гири, массу которых mд выбирают существенно меньше дискретности d, подсчитывают число N гирь, при котором показание возрастет на 1 d в результате прохождения через полуцелое значение, определяют погрешность весов по разности между номинальной массой груза, увеличенной на d/2, и начальным показанием, увеличенным на N*mд. Способ отличается тем, что массу добавляемых гирь выбирают существенно меньше ширины Мн области неустойчивости показаний при прохождении полуцелого значения, регистрируют число гирь N1, при котором в первый раз показание возрастет на 1 d и вернется к предыдущему, а также N2, при котором показание переключится в последний раз и останется увеличенным, и определяют погрешность весов, принимая за число гирь N среднее значение (N1+N2)/2.
Способ позволяет увеличить точность определения погрешности в d/Мн раз.
Литература
1. OIML INTERNATIONAL RECOMMENDATIONS R 76-1, p.T.5.5.1.
2. OIML INTERNATIONAL RECOMMENDATIONS R 76-1, p.A.4.4.3.
3. О.Г.Лисин. О поверке весов // Законодательная и прикладная метрология. - 2012. №3, с.28-30.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА ОДНОТИПНЫХ ИЗДЕЛИЙ ПУТЕМ ВЗВЕШИВАНИЯ | 2002 |
|
RU2257552C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ МАССЫ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2556831C2 |
| УСТРОЙСТВО С КОМПЛЕКСИРОВАННЫМИ НОСИТЕЛЯМИ РАВНОМЕРНЫХ УГЛОВЫХ ШКАЛ РАЗНОЙ ДИСКРЕТНОСТИ ДЛЯ КАЛИБРОВКИ УГЛОЗАДАЮЩИХ И УГЛОМЕРНЫХ ПРИБОРОВ | 2012 |
|
RU2489682C1 |
| Способ определения погрешности измерения весов | 1985 |
|
SU1394058A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ | 2015 |
|
RU2633804C2 |
| ПОВЕРХНОСТНО-УПРОЧНЕННАЯ ПРЕЦИЗИОННАЯ ГИРЯ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2001 |
|
RU2244269C1 |
| МАНОМЕТРЫ АБСОЛЮТНОГО ДАВЛЕНИЯ С ПОРШНЕВОЙ ПАРОЙ, ОБРАЗОВАННОЙ СТРУКТУРНО-СОПРЯЖЕННЫМИ МАГНЕТИКАМИ (ВАРИАНТЫ) | 2014 |
|
RU2581438C2 |
| Система определения насыпной плотности и засоренности немагнитными материалами металлического лома в полувагонах в составах железнодорожного транспорта | 2018 |
|
RU2717286C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЗАДАННОГО ЗНАЧЕНИЯ ПЕРИОДА РАЗГОНА РЕАКТОРА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 1989 |
|
SU1688711A1 |
Изобретение относится к весоизмерительной технике и может быть использовано при проведении поверки весов, их калибровки или испытаний на утверждение типа. Способ заключается в том, что устанавливают на весы эталонный груз и считывают начальное показание. Затем на весы последовательно добавляют гири, массу которых mд выбирают существенно меньше дискретности d. Подсчитывают число гирь N, при котором показание возрастет на 1 d в результате прохождения через полуцелое значение. Погрешность показания определяют как разность между номинальной массой груза, увеличенной на d/2, и начальным показанием, увеличенным на N*mд. При этом массу добавляемых гирь выбирают существенно меньше ширины Мн области неустойчивости показаний при прохождении полуцелого значения. Подсчитывают число гирь N1, при котором в первый раз показание возрастет на 1 d и вернется к предыдущему, а также число гирь N2, при котором показание переключится в последний раз и останется увеличенным. Определяют погрешность весов, принимая за число гирь N среднее значение (N1+N2)/2. Технический результат заключается в увеличении точности определения погрешности. 1 ил.
Способ определения погрешности весов с цифровой индикацией, заключающийся в том, что устанавливают на весы эталонный груз, считывают начальное показание, последовательно добавляют гири, массу которых mд выбирают существенно меньше дискретности d, подсчитывают число N гирь, при котором показание возрастет на 1 d в результате прохождения через полуцелое значение, определяют погрешность весов по разности между номинальной массой груза, увеличенной на d/2, и начальным показанием, увеличенным на N*mд, отличающийся тем, что массу добавляемых гирь выбирают существенно меньше ширины Мн области неустойчивости показаний при прохождении полуцелого значения, регистрируют число гирь N1, при котором в первый раз показание возрастет на 1 d и вернется к предыдущему, а также N2, при котором показание переключится в последний раз и останется увеличенным, и определяют погрешность весов, принимая за число гирь N среднее значение (N1+N2)/2.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |

