Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной обрывной линейной частью (ПОЛЧ) для сигнализационного прикрытия четырехсторонних перекрестков дорог [1, 2].
Часто маршрут движения нарушителя проходит по имеющейся сети дорог на местности. Во многом успех задержания нарушителя зависит от знания направления его движения. Поэтому сигнализационному прикрытию четырехсторонних перекрестков дорог уделяется значительное внимание. На практике для этого широко применяются СО с ПОЛЧ.
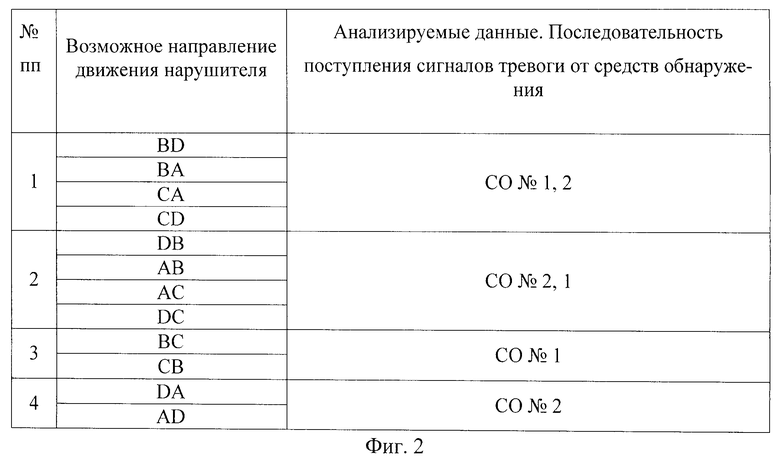
Известен способ определения направления движения нарушителя на четырехстороннем перекрестке с применением рассматриваемых СО, заключающийся в развертывании на перекрестке двух СО и последующем аналитическом выводе о направлении движения нарушителя по очередности и номерам СО, выдавших сигналы тревоги (фиг.1, 2) [2].
Недостатком этого способа является низкая точность указания направления движения нарушителя. Так из двенадцати возможных направлений движения четыре определяются попарно и остальные восемь - двумя группами по четыре (фиг.2).
Целью изобретения является повышение точности указания направления движения нарушителя без увеличения числа СО.
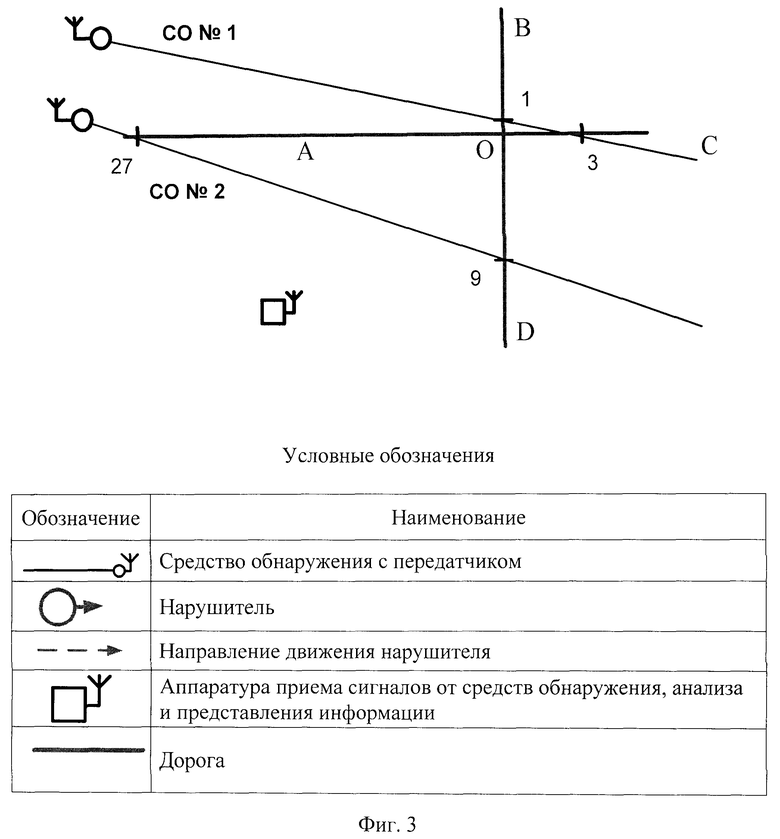
Для достижения поставленной цели разработан способ сигнализационного прикрытия перекрестка дорог, заключающийся в развертывании двух СО таким образом, чтобы расстояния от центра перекрестка до точек пересечения ПОЛЧ с дорогой соотносились как 1:3:9:27, и определении направления движения нарушителя по алгоритму на основе анализа очередности выдавших сигнал тревоги СО и временного интервала задержки между их поступлением с учетом возможного диапазона скоростей нарушителя на данной местности и расстояний между ПОЛЧ на этих направлениях движения.
На перекрестке дорог ПОЛЧ средств обнаружения развертываются таким образом, чтобы они прикрывали две дороги, и расстояния от центра перекрестка до точек пересечения ПОЛЧ с дорогой относились как (фиг.3):

Расстояние OB можно представить как единичное расстояние, тогда:

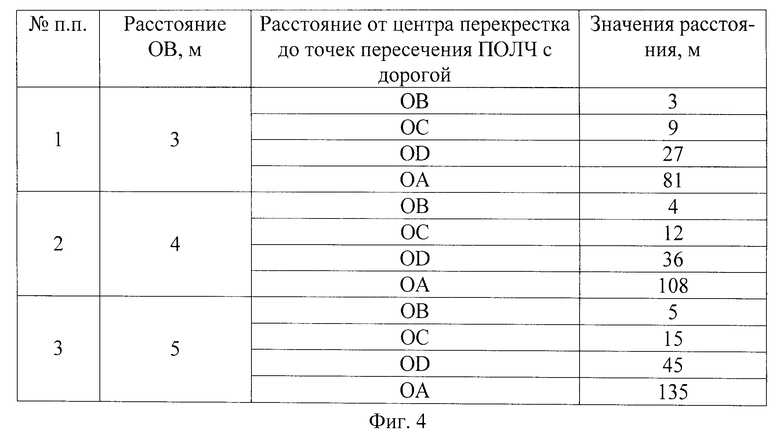
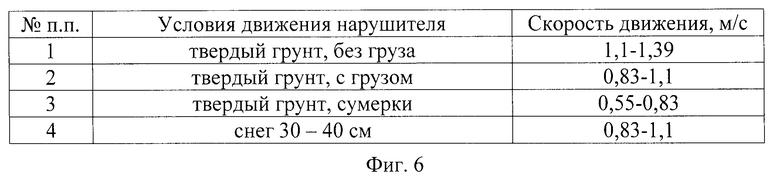
Расстояние ОВ рекомендуется брать от 3 до 5 метров (фиг.4). При такой схеме развертывания нарушитель, двигаясь в заданном направлении N через перекресток дорог, будет проходить разные расстояния SN от первого пересечении ПОЛЧ до второго (фиг.5). Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности (фиг.6). Пределы этих скоростей определены практически, известны и подтверждены на основе экспериментальных исследований [3-5]. При этом отношение верхнего значения скорости (Vmax) к нижнему (Vmin) лежит в пределах 1,5…2,0:
Для упрощения расчетов и снижения ошибки вывода отношение верхнего значения скорости (Vmax) к нижнему (Vmin) берется максимальным, равным двум:
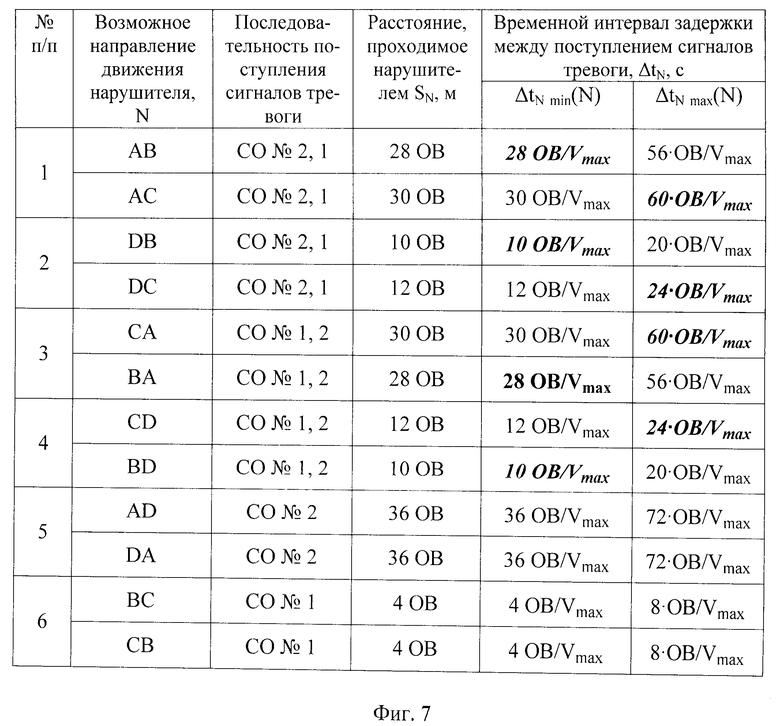
Направления движения можно сгруппировать по парам (всего шесть пар). Эти пары будут отличаться друг от друга или последовательностью поступления сигналов или непересекающимися временными интервалами задержки между поступлением сигналов (фиг.7). На фиг.7 видно, что временной интервал задержки между поступлением сигналов тревоги при движении нарушителя в заданном направлении N ограничивается минимальным и максимальным

где ΔtN - временной интервал задержки между поступлением сигналов тревог при движении нарушителя в заданном направлении N, с;
tmin (N), tmax (N) - минимальное и максимальное значения временных интервалов задержки между поступлением сигналов тревог при движении нарушителя в направлении N, с.
Минимальное и максимальное значения временных интервалов задержки между поступлением сигналов тревоги при движении нарушителя в направлении N рассчитываются по формуле:

где SN - расстояние от первого пересечении ПОЛЧ до второго пересечения, проходимое нарушителем в направлении N, м (см. фиг.4, 5);
Vmin, Vmax - нижний и верхний пределы скорости нарушителя на перекрестке, м/с.
С учетом формулы (4) минимальное и максимальное значения этих временных интервалов можно выразить (фиг.7):
Если в паре направлений минимальное и максимальное значения временных интервалов задержки между поступлением сигналов тревог несколько отличается, то для этой пары общими принимаются крайние значения (фиг.7).
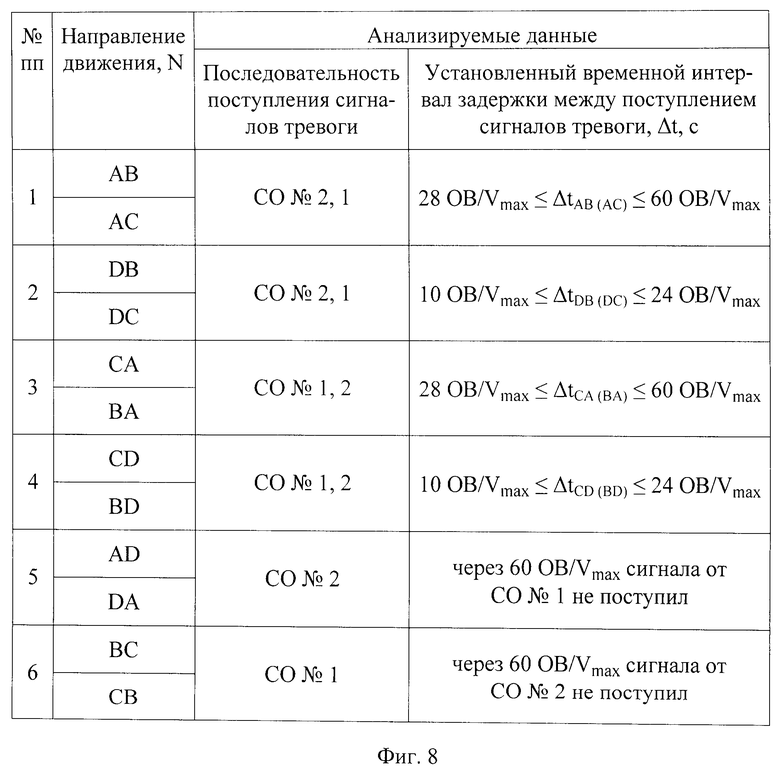
Таким образом, решение о направлении движения нарушителя принимается на основании полученной последовательности сигналов от СО и сравнении измеренного интервала времени ÷t с расчетным ΔtN (фиг.8).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Развертывание СО №1, 2 с учетом требуемых расстояний от центра перекрестка до точки пересечения ПОЛЧ СО (фиг.3, 4).
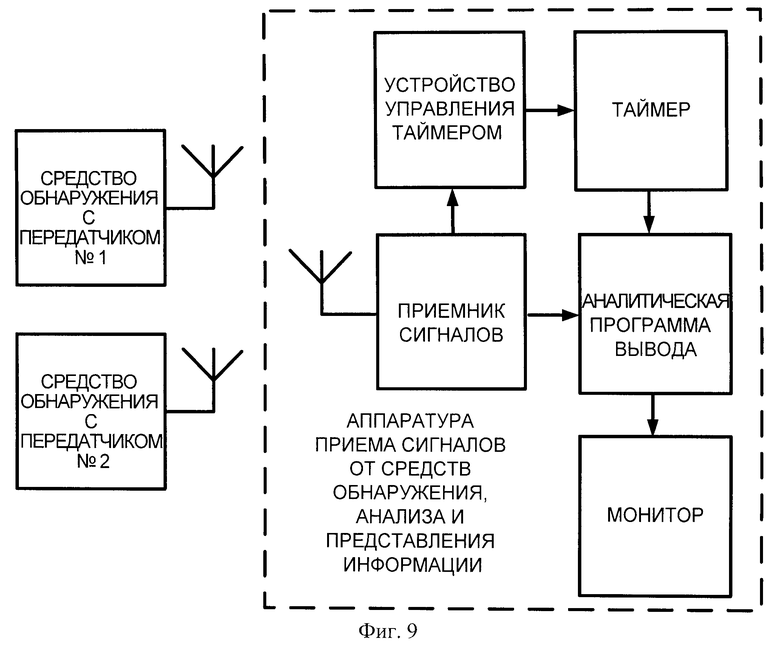
2. Развертывание аппаратуры приема сигналов, анализа и представления информации (АПАПИ) (фиг.9).
3. Определение расчетного интервала времени ΔtN (7) (фиг.4-6).
4. Составление таблицы принятия решения о направлении движения нарушителя на четырехстороннем перекрестке (фиг.7, 8).
Основной этап начинается при движении нарушителя через перекресток дорог и включает:
1. Регистрацию АПАПИ первого сигнала тревоги от СО при пересечении ПОЛЧ нарушителем на перекрестке и начало отсчета интервала времени Δt.
2. Окончание отсчета интервала времени (Δt) при поступлении второго сигнала тревоги или при непоступлении второго сигнала тревоги за время, превышающее значение 60 OB / Vmax (фиг.8).
3. Принятие решения о направлении движения нарушителя согласно таблицы принятия решения о направлении движения нарушителя на перекрестке дорог (фиг.8).
Сущность изобретения поясняется графическими материалами, где на:
- фиг.1 представлена схема известного способа определения направления движения нарушителя на перекрестке дорог;
- фиг.2 - таблица принятия решения о направлении движения нарушителя на перекрестке дорог для известного способа;
- фиг.3 - схема предлагаемого способа определения направления движения нарушителя на перекрестке дорог;
- фиг.4 - таблица рекомендуемых расстояний от центра перекрестка до точек пересечения ПОЛЧ с дорогой;
- фиг.5 - таблица расстояний, проходимых нарушителем на перекрестке;
- фиг.6 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг.7 - таблица временных интервалов задержки между поступлением сигналов тревог;
- фиг.8 - таблица принятия решения о направлении движения нарушителя на перекрестке дорог;
- фиг.9 - структурная схема сбора, обработки и отображения информации по радиоканалу.
Технический результат состоит в повышении точности указания направления движения нарушителя (из двенадцати направлений определяется возможная пара направлений движения) без увеличения числа СО.
Источники информации
1. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г.Магауенов - М.: Горячая - Телеком, 2004. - 367 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г.Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
4. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.
5. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. Часть 2. - М.: Просвещение, 1996. - 196 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ | 2012 |
|
RU2517687C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2606045C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА НАРУШЕНИЯ СИГНАЛИЗАЦИОННОГО РУБЕЖА | 2012 |
|
RU2519046C2 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2013 |
|
RU2540841C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА ПЕРЕКРЕСТКЕ ДОРОГ | 2012 |
|
RU2523068C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЁСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2014 |
|
RU2546303C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА Т - ОБРАЗНОМ ПЕРЕКРЕСТКЕ ДОРОГ | 2015 |
|
RU2599610C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЧЕТЫРЕХСТОРОННЕГО ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2599603C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |

Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения с протяженной обрывной линейной частью, для сигнализационного прикрытия четырехсторонних перекрестков дорог. Технический результат заключается в повышении точности указания направления движения нарушителя, поскольку из двенадцати направлений определяется возможная пара направлений движения, без увеличения числа средств обнаружения. В способе развертывают на перекрестке средства обнаружения так, чтобы расстояние от центра перекрестка до точек пересечения обрывной линейной части с дорогой соотносились как 1:3:9:27, определяют направление движения нарушителя по очередности номеров, выдавших сигнал тревоги, и временному интервалу задержки между их поступлением с учетом возможного диапазона скоростей нарушителя на данной местности и расстояний между обрывной линейной частью. 9 ил. 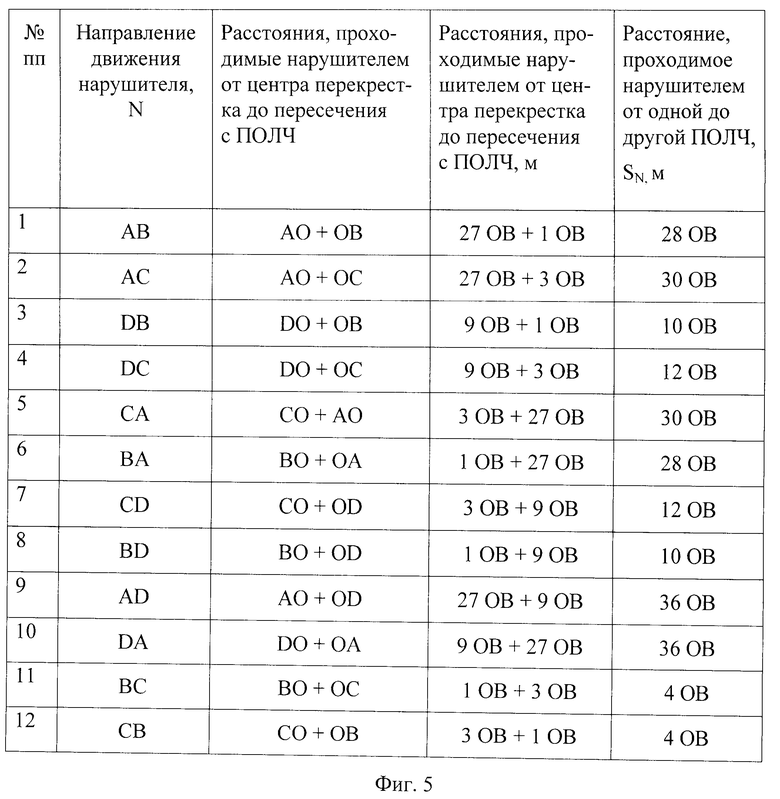
Способ сигнализационного прикрытия перекрестка дорог, заключающийся в развертывании на четырехстороннем перекрестке дорог двух обрывных средств обнаружения, выдаче сигналов тревоги, анализе очередности поступления сигналов тревоги от средств обнаружения, отличающийся тем, что при развертывании обрывных средств обнаружения расстояния от центра перекрестка до точек пересечения протяженных обрывных линейных частей с дорогой соотносятся как 1:3:9:27 и применяется алгоритм, определяющий направление движения по очередности номеров, выдавших сигнал тревоги обрывных средств обнаружения, и временному интервалу задержки между их поступлением с учетом возможного диапазона скоростей нарушителя на данной местности и расстояний между протяженными обрывными линейными частями на этих направлениях движения.
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ЧЕЛОВЕКА В ЗОНЕ ОХРАНЫ | 2005 |
|
RU2291493C2 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 7283048 B2, 16.10.2007 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

