Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной зоной обнаружения (ПЗО), построенных на радиолучевом или инфракрасном принципах обнаружения, для сигнализационного прикрытия четырехсторонних перекрестков дорог. [1]
Часто маршрут движения нарушителя проходит по имеющейся сети дорог на местности. Во многом успех задержания нарушителя зависит от знания направления его движения. Поэтому сигнализационному прикрытию четырехсторонних перекрестков дорог уделяется значительное внимание. На практике для этого широко применяются СО с ПЗО. Протяженность зоны обнаружения такого средства обнаружения более 100 метров. [1]
Прототипом предлагаемого способа является способ сигнализационного прикрытия перекрестка дорог [2]. Этот способ заключается в развертывании на перекрестке двух обрывных СО так, чтобы расстояния от центра перекрестка до точек пересечения протяженных обрывных линейных частей (ПОЛЧ) с дорогой соотносились как 1:3:9:27 и последующем определении направления движения нарушителя по очередности номеров выдавших сигнал тревоги СО и временного интервала задержки между их поступлением с учетом возможного диапазона скоростей нарушителя на данной местности и расстояний между ПОЛЧ на этих направлениях движения (фиг. 1, 2).
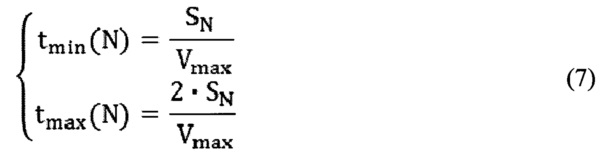
Недостатком этого способа является невысокая точность указания направления движения нарушителя. Так двенадцать возможных направлений движения определяются попарно (шесть пар) (фиг. 2).
Применяемое в этом способе обрывное средство обнаружения при пересечении нарушителем его ПОЛЧ может выдать только один сигнал тревоги, в дальнейшем для перехода сработавшего СО в дежурный режим требуется восстановление его нарушенной ПОЛЧ. В то же время, на сегодняшний день широко применяются СО, построенные на радиолучевом или инфракрасном принципах обнаружения, эти средства имеют протяженную зону обнаружения (ПЗО) и автоматически переходят в дежурный режим, после выхода нарушителя из ПЗО. [1]
Целью изобретения является повышение точности указания наиболее важных направлений движения нарушителя без увеличения числа СО и без снижения точности указания других направлений.
Для достижения поставленной цели разработан способ сигнализационного прикрытия перекрестка дорог, заключающийся в развертывании на перекрестке двух СО так, чтобы расстояния от центра перекрестка до точек пересечения ПЗО с дорогой соотносились как 1:3:9:27 и точки «1» и «3» и точки «3» и «9» лежали на требующих однозначного определения двух прямолинейных взаимообратных и двух поворотных взаимообратных направлениях, соответственно, сама ПЗО первого СО проходила через точки «1» и «9», второго СО проходила через точки «3» и «27»; выдаче СО сигнала тревоги при попадании нарушителя в его ПЗО и автоматическом переходе в дежурный режим при выходе нарушителя из ПЗО; последующем определении направления движения нарушителя по очередности из двух разных или двух одинаковых номеров СО, выдавших сигнал, и временного интервала задержки между их поступлением с учетом возможного диапазона скоростей нарушителя на данной местности и расстояний между ПЗО на этих направлениях движения.
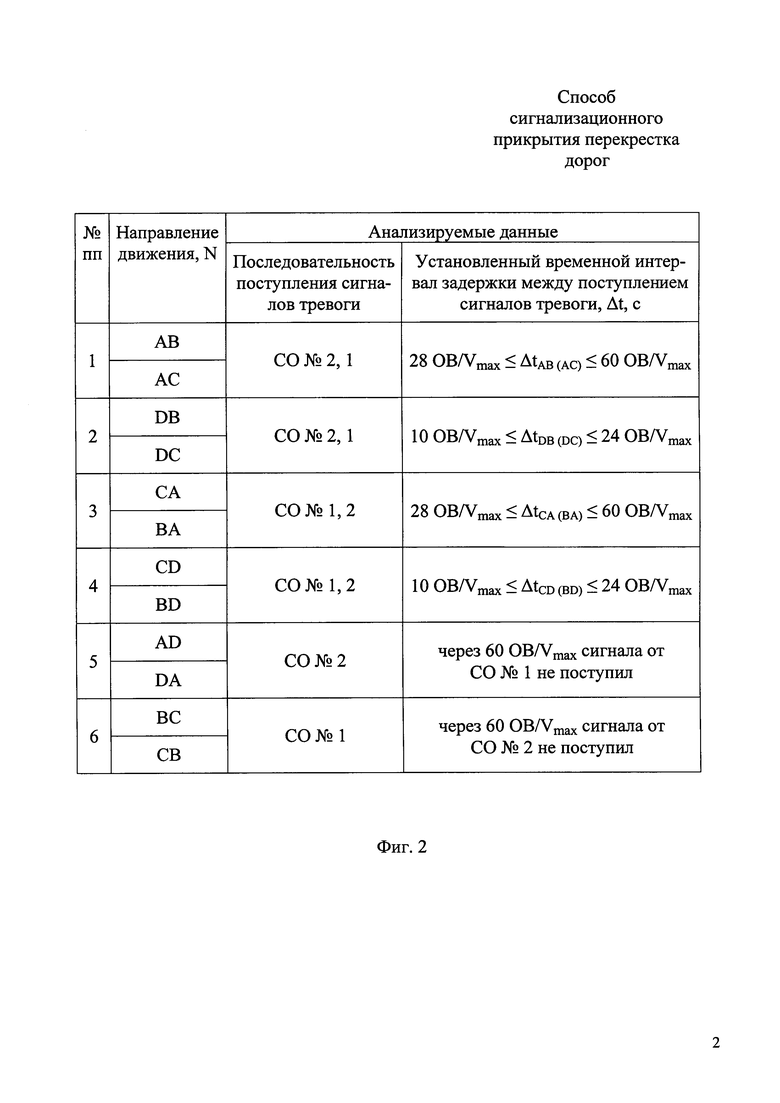
До начала развертывания средств обнаружения на перекрестке дорог выбираются четыре важных направления (два прямолинейных взаимообратных направления и два поворотных взаимообратных направления), которые требуют однозначного определения. (фиг. 3)
На перекрестке дорог средства обнаружения развертываются таким образом, чтобы ПЗО каждого из них прикрывало две дороги, и расстояния от центра перекрестка до точек пересечения ПЗО с дорогой относились как (фиг. 4, 5):

где S1, S3, S9, S27 - расстояния от центра перекрестка до точек пересечения ПЗО с дорогой.
Наименьшее расстояние S1 можно представить как единичное расстояние (S), тогда:

Единичное расстояние S1 рекомендуется брать от 5 до 10 метров, чтобы обеспечить условие своевременного автоматического перехода СО в дежурный режим, в случае если нарушитель при движении через перекресток пересекает ПЗО одного и того же средства дважды. СО должно автоматически перейти в дежурный режим до того момента, как нарушитель подойдет ко второй точке пересечения ПЗО с дорогой и снова окажется в зоне обнаружения после выхода из зоны обнаружения в первой точке пресечения ПЗО с дорогой (фиг. 3). Минимальное расстояние, проходимое нарушителем в этом случае от одной точки пересечения до другой - 10 единичных расстояний (S) или 50-100 метров (фиг. 4, 5). С учетом того, что максимальная ширина зоны обнаружения рассматриваемых СО не превышает 5 метров, этого расстояния достаточно, чтобы обеспечить указанное условие. [1]
Точки пересечения «1» и «3» и точки пересечения «3» и «9» должны лежать на требующих однозначного определения двух прямолинейных взаимообратных направлениях и двух поворотных взаимообратных направлениях, соответственно, сама ПЗО первого СО проходит через точки «1» и «9», второго СО проходит через точки «3» и «27». (фиг. 4, 5)
При такой схеме развертывания нарушитель, двигаясь в заданном направлении N через перекресток дорог, будет проходить разные расстояния SN от первого пересечении ПЗО до второго (фиг. 6). Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности (фиг. 7). Пределы этих скоростей определены практически, известны и подтверждены на основе экспериментальных исследований [3-4]. При этом отношение верхнего значения скорости (Vmax) к нижнему (Vmin) лежит в пределах 1,5…2,0:

Для упрощения расчетов и снижения ошибки вывода отношение верхнего значения скорости (Vmax) к нижнему (Vmin) берется максимальным, равным двум:

12 возможных направлений движения нарушителя через перекресток можно сгруппировать на направления, определяемые попарно (четыре пары), и направления, определяемые однозначно (четыре направления). Эти пары или отдельные направления будут отличаться друг от друга или последовательностью поступления сигналов или непересекающимися временными интервалами задержки между поступлением сигналов (фиг. 8). На фиг. 8 видно, что временной интервал задержки между поступлением сигналов тревоги при движении нарушителя в заданном направлении N ограничивается минимальным и максимальным значениями:

где ΔtN - временной интервал задержки между поступлением сигналов тревог при движении нарушителя в заданном направлении N, с;
tmin(N), tmax (N) _ минимальное и максимальное значения временных интервалов задержки между поступлением сигналов тревог при движении нарушителя в направлении N, с;
Минимальное и максимальное значения временных интервалов задержки между поступлением сигналов тревоги при движении нарушителя в направлении N рассчитываются по формуле:
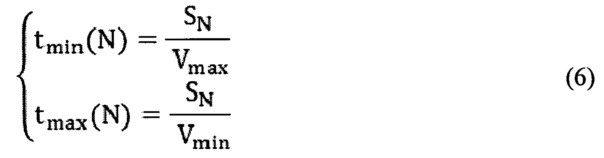
где SN - расстояние от первого пересечении ПЗО до второго пересечения, проходимое нарушителем в направлении N, м (см. фиг. 4, 5);
Vmin, Vmax - нижний и верхний пределы скорости нарушителя на перекрестке, м/с.
С учетом формулы (4) минимальное и максимальное значения этих временных интервалов можно выразить (фиг. 8):
Если в паре направлений минимальное и максимальное значения временных интервалов задержки между поступлением сигналов тревог несколько отличается, то для этой пары общими принимаются крайние значения (фиг. 8).
Таким образом, решение о направлении движения нарушителя принимается на основании полученной последовательности сигналов от СО и сравнении измеренного интервала времени Δt с расчетным ΔtN (фиг. 8).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Определение двух прямолинейных взаимообратных и двух поворотных взаимообратных направлений движения, которые требуют однозначного определения (фиг. 3).
2. Развертывание СО №1, 2 с учетом требуемых расстояний от центра перекрестка до точек пересечения ПЗО СО с дорогами (фиг. 4, 5).
3. Развертывание аппаратуры приема сигналов, анализа и представления информации (АПАПИ) (фиг. 9).
4. Определение расчетного интервала времени ΔtN (формула 7).
5. Составление таблицы принятия решения о направлении движения нарушителя на четырехстороннем перекрестке (фиг. 8).
Основной этап начинается при движении нарушителя через перекресток дорог и включает:
1. Регистрацию приемником 5 первого сигнала тревоги от одного из средств 1 или 4 обнаружения с передатчиком при пересечении нарушителем его ПЗО, запуском таймера 3 устройством 2 управления таймером, начало отсчета им интервала времени Δt и записью номера средства обнаружения в решающее устройство 6 (фиг. 9).
2. Окончание отсчета интервала времени Δt таймером 3 с момента регистрации приемником 5 второго сигнала тревоги от средства 4 или 1 обнаружения при пересечении нарушителем его ПЗО, записью номера средства обнаружения и отсчитанного интервала времени в решающее устройство 6 (фиг. 9).
3. Окончание отсчета интервала времени Δt таймером 3 в случае, если приемник 5 вторично не зарегистрировал сигнал тревоги от средства 4 или 1 в течение установленного интервала времени, после поступления первого сигнала (фиг. 8).
4. Сравнение решающим устройством 6 поступившей последовательности сигналов и зарегистрированного временного интервала задержки между их поступлением с данными таблицы принятия решения о направлении движения нарушителя на перекрестке дорог (фиг. 8).
5. Принятие решения о направлении движения нарушителя решающим устройством 6 согласно таблице принятия решения о направлении движения нарушителя (фиг. 8).
6. Выведение результата на монитор 7 (фиг. 9).
Сущность изобретения поясняется графическими материалами, где представлены на:
- фиг. 1 - схема известного способа определения направления движения нарушителя на перекрестке дорог;
- фиг. 2 - таблица принятия решения о направлении движения нарушителя на перекрестке дорог для известного способ;
- фиг. 3 - таблица вариантов прямолинейных взаимообратных и поворотных взаимообратных направлений движения, требующих однозначного определения;
- фиг. 4 - четыре варианта схем развертывания средств обнаружения в зависимости от требуемых однозначного определения направлений движения;
- фиг. 5 - четыре варианта схем развертывания средств обнаружения в зависимости от требуемых однозначного определения направлений движения;
- фиг. 6 - таблица расстояний, проходимых нарушителем на перекрестке дорог и временных интервалов задержки между поступлением сигналов тревог в зависимости от направления движения нарушителя;
- фиг. 7 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг. 8 - таблица принятия решения о направлении движения нарушителя на перекрестке дорог;
- фиг. 9 - структурная схема сбора, обработки и отображения информации по радиоканалу.
Технический результат состоит в повышении точности указания наиболее важных направлений движения нарушителя (эти четыре направления определяются однозначно) без увеличения числа СО и без снижения точности указания других направлений (оставшиеся восемь направлений определяются попарно).
Источники информации
1. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов. - М.: Горячая - Телеком, 2004. - 367 с.
2. Пат. 2514126 Российская Федерация, МПК51 G08B 25/10. Способ сигнализационного прикрытия перекрестка дорог / С.А. Удот. - №2012145072/08; заявл. 22.10.12; опубл. 27.04.14, Бюл. №12.
3. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
4. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ Т-ОБРАЗНОГО ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2615949C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА Т - ОБРАЗНОМ ПЕРЕКРЕСТКЕ ДОРОГ | 2015 |
|
RU2599610C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА ПЕРЕКРЕСТКЕ ДОРОГ | 2012 |
|
RU2523068C2 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЧЕТЫРЕХСТОРОННЕГО ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2599603C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2013 |
|
RU2540841C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЁСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2014 |
|
RU2546303C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2012 |
|
RU2514126C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |

Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной зоной обнаружения (ПЗО), построенных на радиолучевом или инфракрасном принципах обнаружения для сигнализационного прикрытия четырехсторонних перекрестков дорог. Способ заключается в развертывании на перекрестке двух СО так, чтобы расстояния от центра перекрестка до точек пересечения ПЗО с дорогой соотносились как 1:3:9:27 и точки «1» и «3» и точки «3» и «9» лежали на требующих однозначного определения двух прямолинейных взаимообратных и двух поворотных взаимообратных направлениях, соответственно, сама ПЗО первого СО проходила через точки «1» и «9», второго СО проходила через точки «3» и «27»; выдаче сигнала тревоги СО при попадании нарушителя в его ПЗО и автоматическом переходе в дежурный режим при выходе нарушителя из ПЗО; последующем определении направления движения нарушителя по очередности из двух разных или двух одинаковых номеров СО, выдавших сигнал, и временного интервала задержки между их поступлением с учетом возможного диапазона скоростей нарушителя на данной местности и расстояний между ПЗО на этих направлениях движения. Способ включает подготовительный этап с развертыванием двух СО по разработанной схеме и основной этап, который начинается с момента появления нарушителя на перекрестке и пересечения им зоны обнаружения одного из СО. В ходе основного этапа направление движения нарушителя определяется по алгоритму, учитывающему зарегистрированную очередность номеров СО, выдавших сигнал тревоги, временной интервал задержки между поступлением сигналов, диапазон возможных скоростей нарушителя на данной местности и расстояния между ПЗО по дорогам. Таким образом, становится возможным повышение точности указания наиболее важных направлений движения нарушителя (эти четыре направления определяются однозначно) без увеличения числа СО и без снижения точности указания других направлений (оставшиеся восемь направлений определяются попарно). 9 ил.
Способ сигнализационного прикрытия перекрестка дорог, заключающийся в развертывании на четырехстороннем перекрестке дорог двух средств обнаружения таким образом, чтобы расстояние от центра перекрестка до точек пересечения линейных частей с дорогой соотносились как 1:3:9:27, и применении алгоритма, определяющего направление движения по очередности номеров выдавших сигнал тревоги средств обнаружения и временного интервала задержки между их поступлением с учетом возможного диапазона скоростей нарушителя на данной местности и расстояний между линейными частями на этих направлениях движения, отличающийся тем, что применяются радиолучевые (инфракрасные) средства обнаружения с протяженными зонами обнаружения; определяется порядок ориентирования протяженных зон обнаружения в зависимости от направлений, требующих однозначного определения, при котором расстояния от центра перекрестка до точек пересечения протяженных зон обнаружения с дорогами откладываются так, чтобы точки «1» и «3» и точки «3» и «9» лежали на требующих однозначного определения двух прямолинейных взаимообратных и двух поворотных взаимообратных направлениях, соответственно, сама протяженная зона обнаружения первого средства обнаружения проходит через точки «1» и «9», второго средства проходит через точки «3» и «27»; средство обнаружения автоматически переходит в дежурный режим при выходе нарушителя из его протяженной зоны обнаружения; в алгоритм вывода о направлении движения нарушителя включен случай последовательного поступления двух сигналов тревоги от одного средства обнаружения.
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| US 20100156637 A1, 24.06.2010 | |||
| СЕЙСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ | 2014 |
|
RU2565364C1 |
| US 0005969608 A1, 19.10.1999. | |||

