Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной линейной частью (ПЛЧ) в виде гибкого кабеля, построенных на проводно-волновом или вибрационном принципе обнаружения, для сигнализационного прикрытия четырехсторонних перекрестков дорог и путей их обхода [1-3].
Как правило, маршрут своего движения нарушитель строит с учетом существующей сети дорог на местности. Он двигается или по самой дороге или вдоль нее на безопасном удалении (в обход) [4]. Во многом успех задержания нарушителя зависит от знания силами реагирования направления его движения. Поэтому сигнализационному прикрытию четырехсторонних перекрестков дорог и путей их обхода уделяется значительное внимание. На практике для этого широко применяются СО с ПЛЧ, построенные на проводно-волновом или вибрационном принципе обнаружения [1-3].
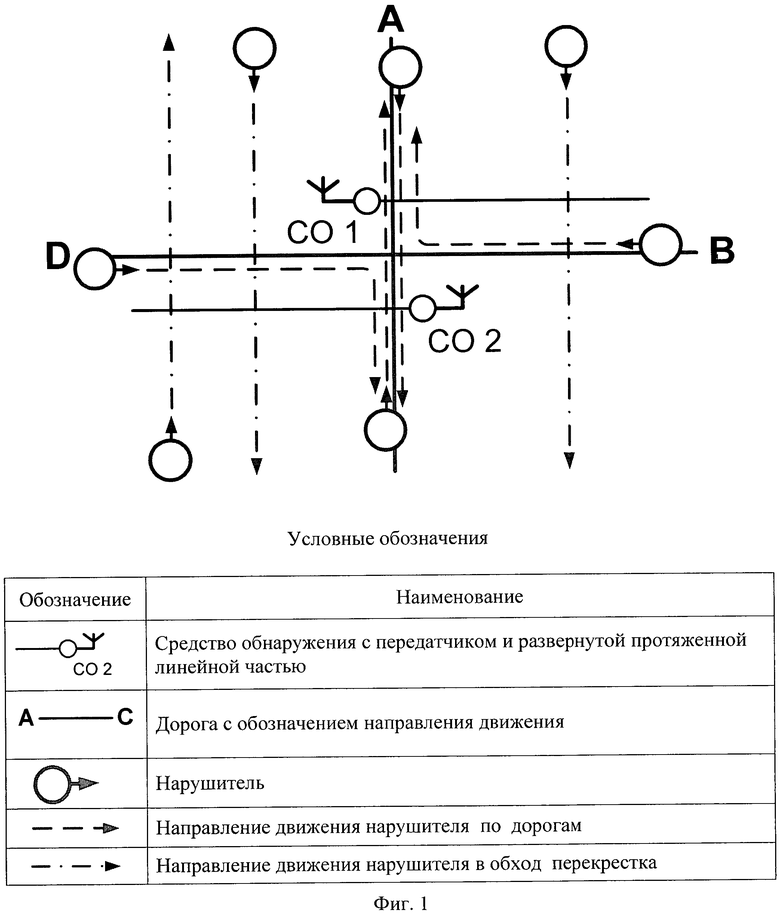
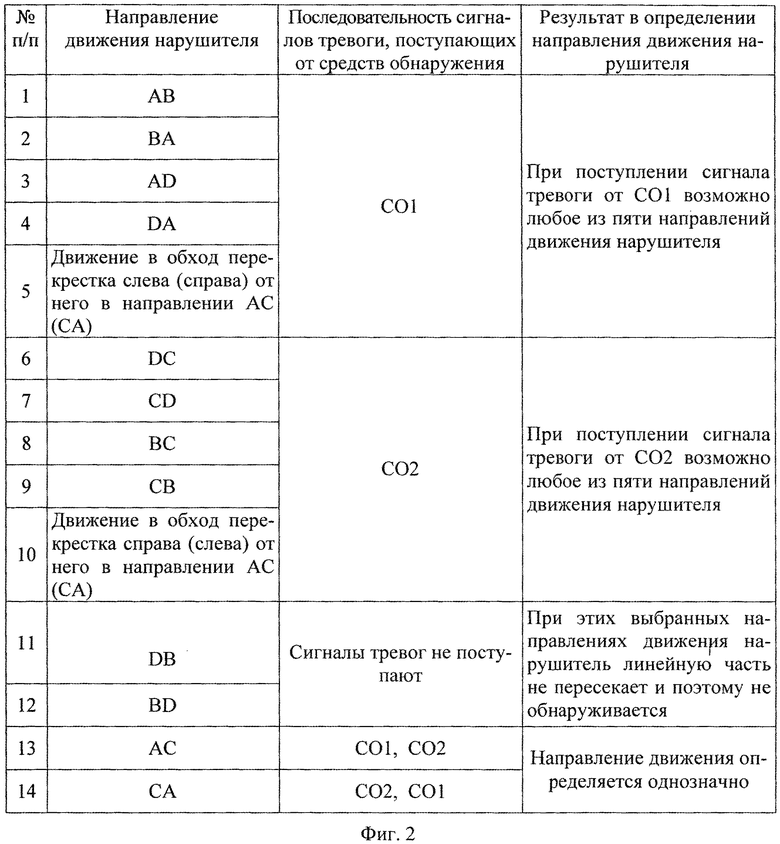
Известен способ обнаружения нарушителя и определения направления его движения на перекрестке дорог и путей его обхода с применением средств обнаружения, заключающийся в развертывании на перекрестке двух СО и последующем аналитическом выводе о направлении движения нарушителя по очередности и номерам СО, выдавших сигналы тревоги (фиг.1, 2) [2, 3].
Недостатками этого способа являются низкие вероятность обнаружения и точность указания направления движения нарушителя. Так, из четырнадцати возможных направлений движения (двенадцать - через перекресток и два - в обход его) два определяются однозначно, десять - двумя группами по пять, и при движении нарушителя в двух направления он не обнаруживается вообще (фиг.2).
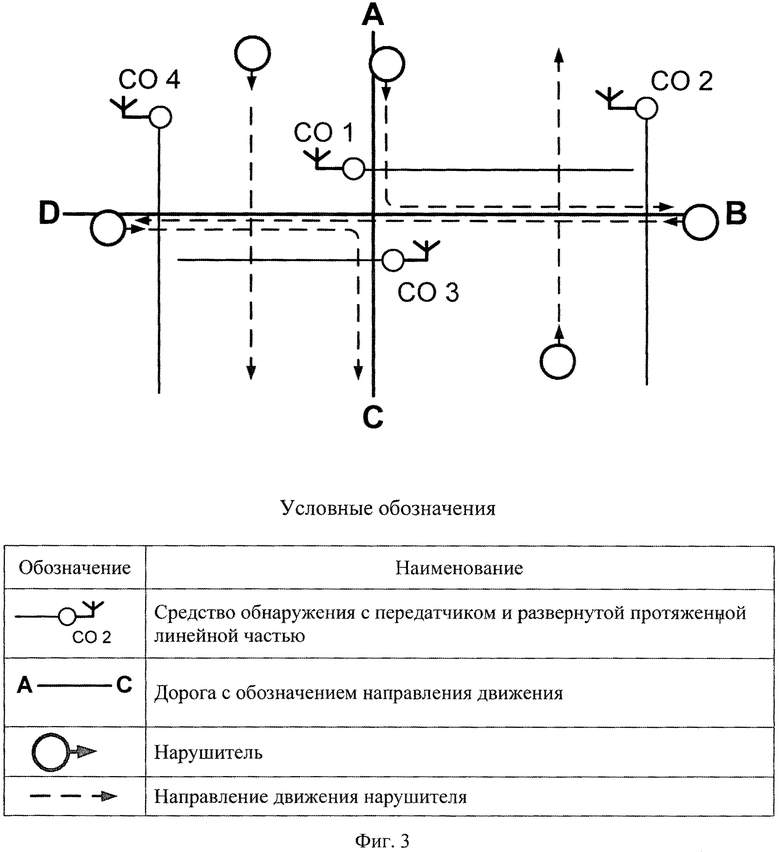
Также известен способ обнаружения нарушителя и определения направления его движения на перекрестке дорог, в котором для повышения вероятности обнаружения нарушителя и точности указания его направления движения разворачиваются четыре СО [2, 3]. Недостатком этого способа является применение значительного числа СО (фиг.3).
Целью изобретения является повышение вероятности обнаружения и точности указания направления движения нарушителя при сигнализационном прикрытии перекрестка дорог и путей его обхода двумя средствами обнаружения.
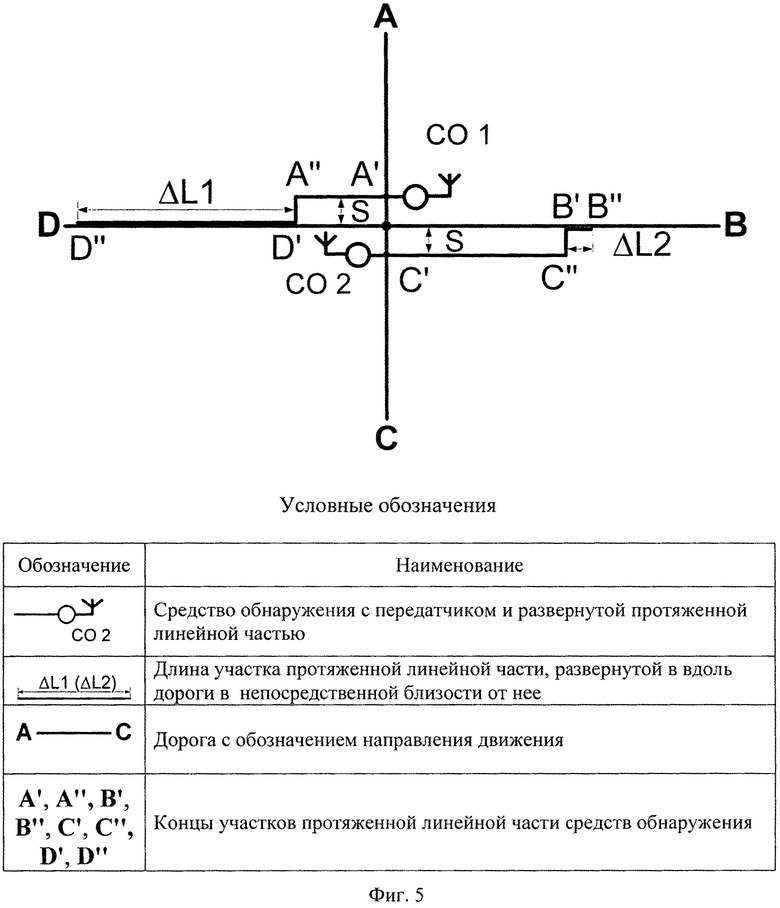
Для достижения поставленной цели разработан способ обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода, заключающийся в развертывании на четырехстороннем перекрестке дорог и прилегающей к нему местности двух средств обнаружения с протяженной линейной частью таким образом, чтобы ПЛЧ каждого средства обнаружения одну из дорог пересекала поперек на удалении от центра перекрестка, равном трехкратному значению ширины зоны обнаружения самого СО, участком определенной длины лежала в непосредственной близости вдоль другой дороги, покрывая ее своей зоной обнаружения, и применении алгоритма, определяющего направление движения нарушителя по числу, очередности поступления и отношению между длительностями сигналов тревоги. Соотношение ширины зоны обнаружения СО к длинам участков составляет 1:3:22,5 (фиг.4, 5).
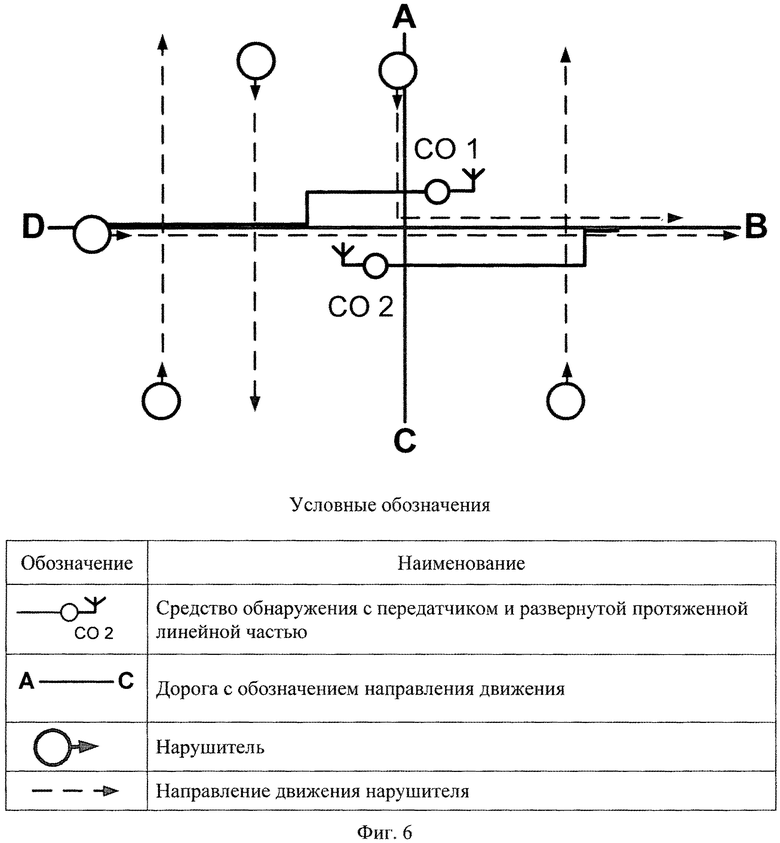
Проходя перекресток, нарушитель дважды попадает в зону обнаружения СО (фиг.6). Если скорость нарушителя изменяется незначительно, то место нарушения может быть определено по длительности сигнала тревоги (времени нахождения СО в режиме тревоги). Так, если нарушитель пересечет ПЛЧ, лежащую поперек дороги, то длительность по времени сигнала тревоги будет меньше, чем длительность сигнала, когда нарушитель двигается по участку дороги, вдоль которого развернута ПЛЧ. По очередности сработавших СО и отношению между длительностями первого и второго сигналов тревоги можно определить направление движения нарушителя на перекрестке. Если нарушитель движется в обход перекрестка дорог справа или слева, то поступает только один сигнал тревоги (фиг.6).
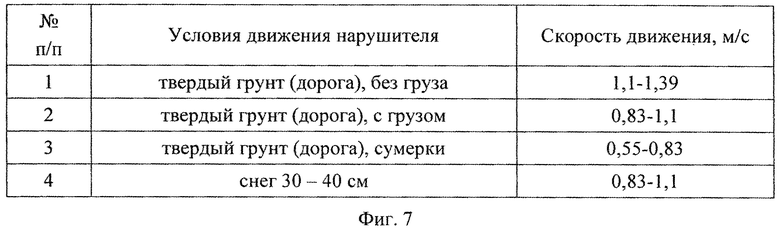
Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности (фиг.7). Пределы этих скоростей определены практически, известны и подтверждены на основе экспериментальных исследований [4-6]. Верхний предел скорости нарушителя не превышает нижний более чем в полтора раза (фиг.7).

где VMAX - максимально возможная скорость движения нарушителя через перекресток дорог, м/с;
VMIN - минимально возможная скорость движения нарушителя через перекресток дорог, м/с.
Определить места нарушений (место, где ПЛЧ лежит поперек дороги, или место, где ПЛЧ лежит вдоль нее) без знания конкретного значения скорости нарушителя возможно, если анализировать отношения между длительностями сигналов тревоги. При этом чтобы исключить ошибку в выводе из-за неравномерности скорости движения нарушителя, необходимо следующее:
1) минимальная длительность сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО2 (B′B″), должна превышать максимальную длительность сигнала тревоги при пересечении нарушителем одного из двух участков ПЛЧ, лежащих поперек дороги (фиг.5, 8):

где (tH1)MAX - максимальная длительность сигнала тревоги при пересечении нарушителем участка ПЛЧ СО1, лежащего поперек дороги, с;
(tH2)MAX - максимальная длительность сигнала тревоги при пересечении нарушителем участка ПЛЧ СО2, лежащего поперек дороги, с;
(tΔL2)MIN - минимальная длительность сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО2 (B′B″), с;
2) минимальная длительность сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО1 (D′D″), должна превышать максимальную длительность сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО2 (B′B″) (фиг.5, 8):

где (tΔL1)MIN - минимальная длительность сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО1 (D′D″), с.
Максимальное значение длительности сигнала тревоги при пересечении нарушителем участков ПЛЧ СО1 и СО2, лежащих поперек дороги, зависит от ширины зоны обнаружения СО, времени установления его в дежурный режим и минимально возможной скорости нарушителя (фиг.4, 7, 9):

где tДР - время установления СО в дежурный режим после выхода нарушителя из зоны обнаружения, с;
H - ширина зоны обнаружения СО, м (фиг.4).
Минимальное значение длительности сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ, зависит от длины участка ПЛЧ, лежащего вдоль дороги, времени установления СО в дежурный режим и максимально возможной скорости нарушителя, поэтому для СО2:

где ΔL2 - длина участка ПЛЧ СО2, лежащего вдоль дороги (B′B″), м.
Для СО1:

где ΔL1 - длина наименьшего из двух участков ПЛЧ, лежащих вдоль дороги (B′B″), м.
Максимальное значение длительности сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ, зависит от длины участка ПЛЧ, лежащего вдоль дороги, времени установления СО в дежурный режим и минимально возможной скорости нарушителя:

Следовательно, чтобы выполнить условие (2), необходимо, чтобы длина ПЛЧ СО2, лежащей вдоль дороги (B′B″), составляла:

С учетом того, что максимально возможная скорость нарушителя на перекрестке не превышает минимально возможную более чем в 1,5 раза (1):

При выполнении этого условия даже при неравномерной скорости движения нарушителя длительность сигнала тревоги при его движении вдоль ПЛЧ будет всегда больше, чем при пересечении им же ПЛЧ поперек (1-2) (фиг.8).

где tH - длительность поступившего сигнала тревоги при пересечении нарушителем ПЛЧ, лежащей поперек дороги, с;
tΔL2 - длительность поступившего сигнала тревоги при движении нарушителя по участку дороги, вдоль которого лежит ПЛЧ СО2, с;
При движении нарушителя, когда он пересекает только участки ПЛЧ, лежащие поперек дороги (направления AC, CA), длительности сигналов тревог не будут отличаться друг от друга более чем в 1,5 раза (фиг.10).

где tH1 - длительность сигнала тревоги, поступившего от СО1, при пересечении нарушителем ПЛЧ, лежащей поперек дороги, с;
tH2 - длительность сигнала тревоги, поступившего от СО2, при пересечении нарушителем ПЛЧ, лежащей поперек дороги, с.
Отношения длительностей сигналов тревоги в уже рассмотренных последовательностях лежат в пределах 0,67…1,5 и 2…4,5 (7-8). Поэтому, чтобы последовательность из двух сигналов, поступивших при пресечении нарушителем ПЛЧ, лежащей поперек дороги (направления AC, CA), можно было отличить от последовательности сигналов, поступающих при движении нарушителя по участкам дорог, где ПЛЧ лежит вдоль них (направления DB, BD), необходимо выполнение условия (фиг.8, 10):

где tΔL2 - длительность сигнала тревоги, поступившего от СО2, при движении нарушителя по участку дороги, вдоль которого лежит ПЛЧ (B′B″), с;
tΔL1 - длительность сигнала тревоги, поступившего от СО1, при движении нарушителя по участку дороги, вдоль которого лежит ПЛЧ (D″D′), с.
Для выполнения этого условия необходимо следующее отношение между длинами участков ПЛЧ, лежащих вдоль дорог (фиг.5, 8):

где ΔL1 - длина участка ПЛЧ СО1, развернутого вдоль дороги (D″D′), м.
Если выразить D″D′ через ширину зоны обнаружения H, то

При выполнении этого условия при движении нарушителя через один из участков ПЛЧ, развернутых поперек дороги, и вдоль участка D″D′ отношение между длительностями сигналов тревоги будет:

Удаление участков протяженной линейной части A″A′ и C″C′ от дороги, с одной стороны, должно быть достаточно большим, чтобы исключать срабатывание СО при движении нарушителя по дороге напротив них, с другой - достаточно малым, чтобы минимизировать длину отрезков ПЛЧ A″D′ и C″B′, и таким образом максимально использовать длину ПЛЧ для сигнализационного прикрытия перекрестка. Конкретное значение удаления определяется шириной зоны обнаружения СО (фиг.4, 9):

где S - условное обозначение удаления участков ПЛЧ A″A′, C″C′ от дороги;
OA′, OC′ - удаление участков ПЛЧ A″A′, C″C′ от дороги, м.
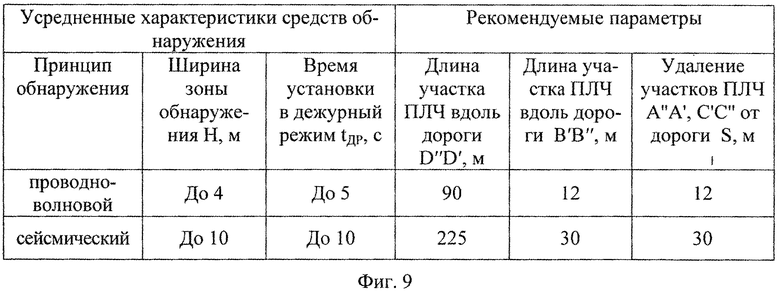
Для различных СО ширина зоны обнаружения может составлять десятки метров (фиг.9).
Участки протяженной линейной части D″D′, B″B′ должны лежать в непосредственной близости от дороги, вдоль которой они развернуты, для того, чтобы двигающийся нарушитель постоянно находился в зоне обнаружения СО (фиг.4) Нарушитель может двигаться как через перекресток (два сигнала тревоги), так и в обход перекрестка (один сигнал тревоги) (фиг.6, 10), поэтому необходимо определить максимальное время накопления поступающих сигналов. Оно зависит от максимально возможного расстояния, которое нарушитель может пройти через перекресток с момента поступления первого сигнала до поступления второго. Это расстояние между двумя участками ПЛЧ, лежащими вдоль дороги, D″B′ при движении нарушителя в направлении DB (фиг.5).

где Δt - время накопления поступающих сигналов, с;
T - минимальное время накопления поступающих сигналов, с.
Длины участков A″A′ и C′C″ определяются исходя из остаточной длины ПЛЧ (фиг.5):

где L1 и L2 - общие длины разворачиваемых ПЛЧ СО1 и СО2, м.
Способ включает два этапа: подготовительный и основной.
Подготовительный этап
1. Развертывание средств 1 и 2 обнаружения с передатчиком с учетом рекомендуемых параметров сигнализационного рубежа ΔL1, ΔL2, S и других (фиг.4, 5, 19), формулы (9, 14, 16, 18).
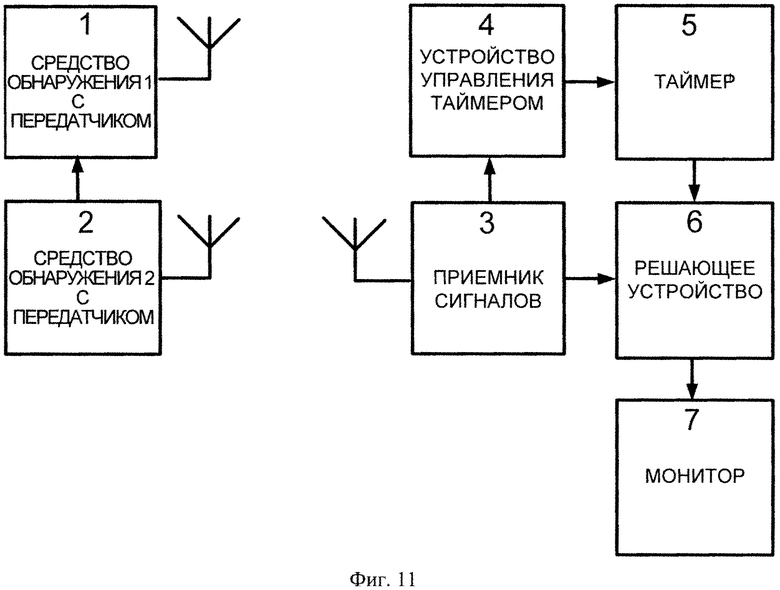
2. Развертывание на местности аппаратуры приема сигналов, анализа и представления информации, включающей в себя приемник 3 сигналов, устройство 4 управления таймером 5, таймер 5, решающее устройство 6 и монитор 7 (фиг.11).
3. Определение минимального времени накопления поступающих сигналов T (17).
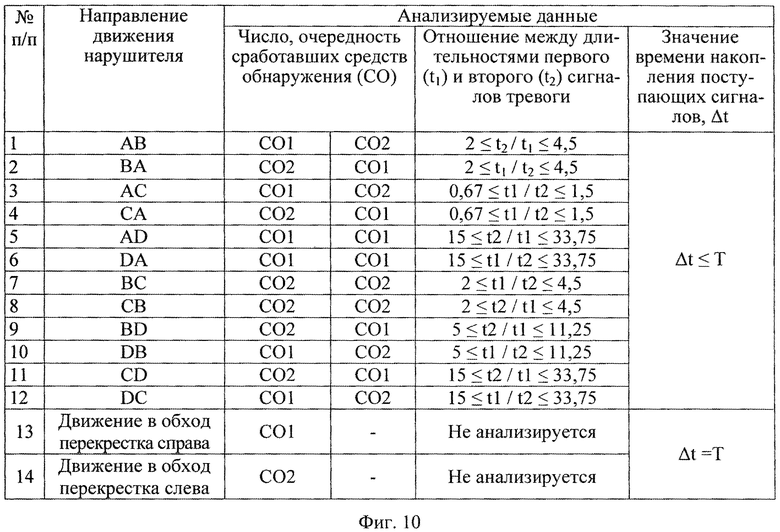
4. Составление таблицы принятия решения (алгоритма вывода) о направлении движения нарушителя на четырехстороннем перекрестке и загрузку ее (его) в решающее устройство 6 (фиг.10).
5. Начало работы средств 1 или 2 обнаружения с передатчиком в дежурном режиме.
Основной этап начинается при движении нарушителя через перекресток дорог или в обход него и попадании его в зону обнаружения одного из СО и включает:
1. Регистрацию приемником 3 первого сигнала тревоги от одного из средств 1 или 2 обнаружения с передатчиком при пересечении нарушителем его зоны обнаружения, запуском таймера 5 устройством 4 управления таймером, начало отсчета им длительности сигнала тревоги, времени накопления поступающих сигналов Δt и записью номера сработавшего средства обнаружения в решающее устройство 6 (фиг.11).
2. Запись в решающее устройство 6 значения длительности первого сигнала тревоги после его окончания. Регистрацию приемником 3 возможного второго сигнала тревоги и определение его длительности таймером 5. Остановку работы таймера 5 в случае достижения времени накопления сигналов (Δt) значения минимального времени накопления поступающих сигналов (T) и непоступлении при этом второго сигнала тревоги или в случае окончания поступления второго сигнала тревоги. Сравнение решающим устройством 6 числа и очередности сработавших средств 1 или 2 обнаружения с передатчиком, соотношения между собой длительностей сигналов тревог с имеющимися в таблице принятия решения (алгоритмом вывода) о направлении движения нарушителя (фиг.10).
3. Формирование одного из выводов о направлении движения нарушителя решающим устройством 6 в зависимости от полученных данных, используемых для анализа (фиг.10):
а) вывода о движении нарушителя в обход перекрестка (справа от дороги AC или слева от дороги AC) при достижении значения времени (Δt) накопления поступающих сигналов, отсчитываемого таймером 5, минимального времени накопления поступающих сигналов (T) и непоступлении за это время второго сигнала на приемник 3 сигналов от средств 1 или 2 обнаружения с передатчиком (фиг.10);
б) вывода о движении нарушителя в одном из направлений (AB, AC, DC, CA, BA, CD, DB, BD, AD, DA, BC, CB) при поступлении на решающее устройство 6 соответствующей очередности сработавших средств 1 или 2 обнаружения с передатчиком и длительности сигналов тревоги от них за время (Δt) накопления поступающих сигналов, отсчитываемого таймером 5, менее минимального времени накопления поступающих сигналов (T) (фиг.10).
4. Обнуление таймера 5 устройством 4 управления таймером. Выведение результата о направлении движения нарушителя на монитор 7 (фиг.11).
Сущность изобретения поясняется графическими материалами, где на:
- фиг.1 представлена схема развертывания двух средств обнаружения в способе обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода с примерами направлений движения нарушителя через перекресток [2, 3];
- фиг.2 - таблица принятия решения (алгоритм вывода) о направлении движения нарушителя на перекрестке дорог для способа обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода [2, 3];
- фиг.3 - схема в способе обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода с развертыванием четырех средств обнаружения [2, 3];
- фиг.4 - схема границ зоны обнаружения средств обнаружения, развернутых на перекрестке;
- фиг.5 - схема развертывания протяженных линейных частей средств обнаружения в предлагаемом способе обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода;
- фиг.6 - схема развертывания протяженных линейных частей средств обнаружения в предлагаемом способе обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода с примерами направлений движения нарушителя;
- фиг.7 - таблица диапазонов скоростей нарушителя на различных участках местности;
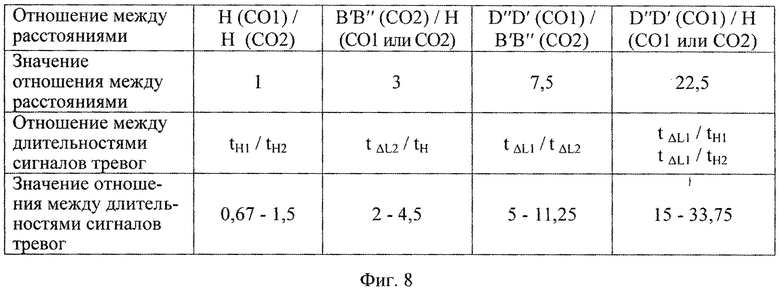
- фиг.8 - таблица зависимости отношений между длительностями сигналов тревоги от значений отношений между шириной зоны обнаружения и длинами участков протяженных линейных частей, лежащих вдоль дорог;
- фиг.9 - сводная таблица некоторых усредненных тактико-технических показателей средств обнаружения и рекомендуемых геометрических размеров сигнализационного рубежа;
- фиг.10 - таблица принятия решения (алгоритм вывода) о направлении движения нарушителя на перекрестке дорог;
- фиг.11 - структурная схема сбора, обработки и отображения информации по радиоканалу.
Технический результат состоит в повышении вероятности обнаружения и точности указания направления движения нарушителя при сигнализационном прикрытии перекрестка дорог и путей его обхода двумя СО.
Источники информации
1. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. Пособие / Р.Г. Магауенов. - М.: Горячая - Телеком, 2004. - 367 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков. - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
5. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
6. Баленко С.В. Школа выживания. - М., 1994. - 140 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2013 |
|
RU2540841C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЧЕТЫРЕХСТОРОННЕГО ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2599603C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЁСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2014 |
|
RU2546303C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ДОРОГОЙ | 2015 |
|
RU2605507C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА Т - ОБРАЗНОМ ПЕРЕКРЕСТКЕ ДОРОГ | 2015 |
|
RU2599610C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2606045C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА ПЕРЕКРЕСТКЕ ДОРОГ | 2012 |
|
RU2523068C2 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2621179C1 |
Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной линейной частью (ПЛЧ) в виде гибкого кабеля, построенных на проводно-волновом или вибрационном принципе обнаружения, для сигнализационного прикрытия четырехсторонних перекрестков дорог и путей их обхода. Технический результат - повышение вероятности обнаружения нарушителя и точности указания его направления движения. Способ заключается в развертывании на четырехстороннем перекрестке дорог и прилегающей к нему местности двух СО с ПЛЧ таким образом, чтобы ПЛЧ каждого СО одну из дорог пересекала поперек на удалении от центра перекрестка, равном трехкратному значению ширины зоны обнаружения самого СО, и участком определенной длины лежала в непосредственной близости вдоль другой дороги, покрывая ее своей зоной обнаружения, соотношение ширины зоны обнаружения СО к длинам участков 1:3:22,5, и применяется алгоритм, определяющий направление движения нарушителя по числу, очередности поступления и отношению между длительностями сигналов тревоги. 11 ил. 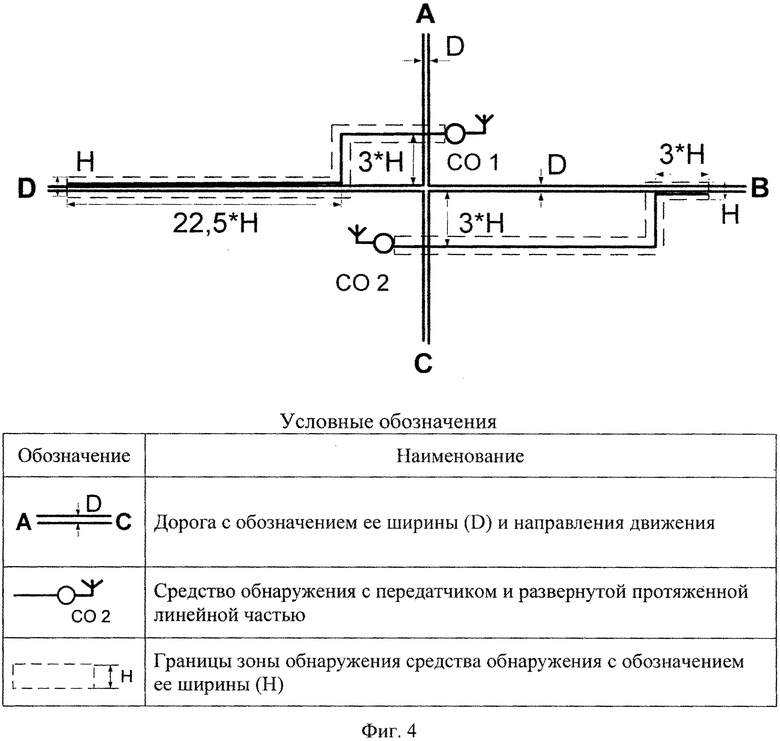
Способ обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода, заключающийся в развертывании на четырехстороннем перекрестке дорог и прилегающей к нему местности двух средств обнаружения с протяженной линейной частью, выдаче сигналов тревоги средствами обнаружения, применении алгоритма, определяющего направление движения по числу и очередности поступления этих сигналов, отличающийся тем, что протяженная линейная часть каждого средства обнаружения пересекает одну из дорог поперек на удалении от центра перекрестка, равном трехкратному значению ширины зоны обнаружения самого средства обнаружения, участком определенной длины лежит в непосредственной близости вдоль другой дороги, покрывая ее своей зоной обнаружения, соотношение ширины зоны обнаружения средства обнаружения к длинам участков составляет 1:3:22,5, а в алгоритме, определяющем направление движения нарушителя, дополнительно учитывается отношение между длительностями сигналов тревоги.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ ОБРЫВНЫМИ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2011 |
|
RU2485596C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ОПРЕДЕЛЕНИЕМ НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2010 |
|
RU2434296C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ЧЕЛОВЕКА В ЗОНЕ ОХРАНЫ | 2005 |
|
RU2291493C2 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |
| Развертывающий преобразователь | 1986 |
|
SU1332336A1 |

