Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной линейной частью (ПЛЧ), построенных на проводно-волновом или вибрационном принципе обнаружения, для сигнализационного прикрытия четырехсторонних перекрестков дорог и путей их обхода [1-3].
Как правило, маршрут своего движения нарушитель строит с учетом существующей сети дорог на местности. Он двигается или по самой дороге, или вдоль нее на безопасном удалении (в обход) [4]. Во многом успех задержания нарушителя зависит от знания силами реагирования направления его движения. Поэтому сигнализационному прикрытию четырехсторонних перекрестков дорог и путей их обхода уделяется значительное внимание. На практике для этого широко применяются СО с ПЛЧ, построенных на основе линии вытекающей волны или вибрационном принципе обнаружения [1-3].
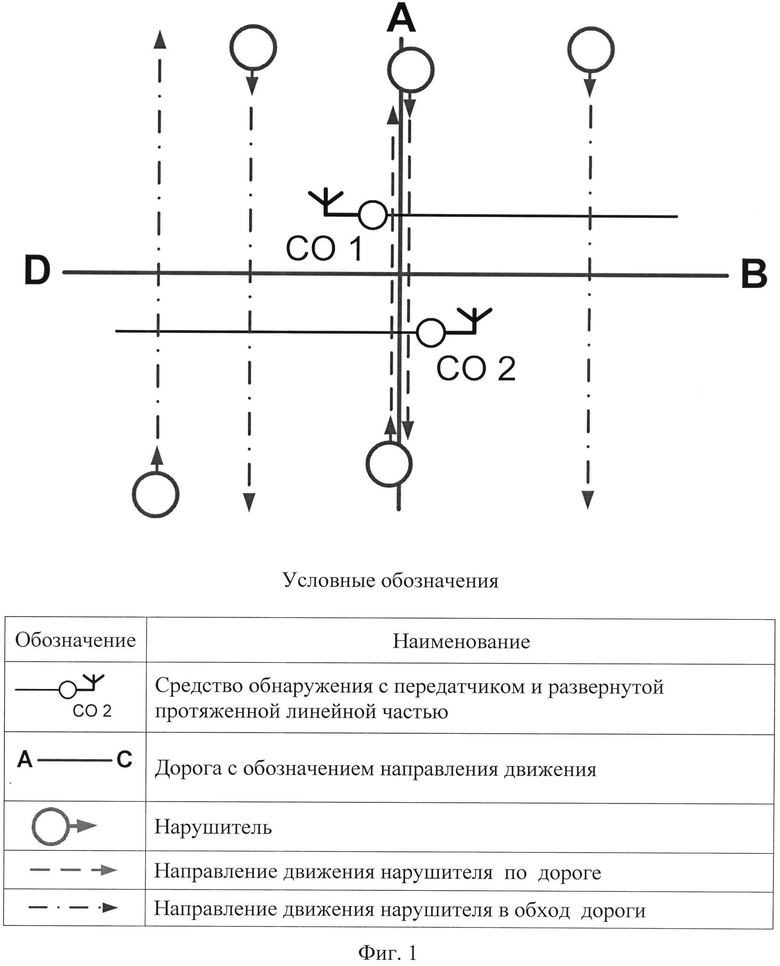
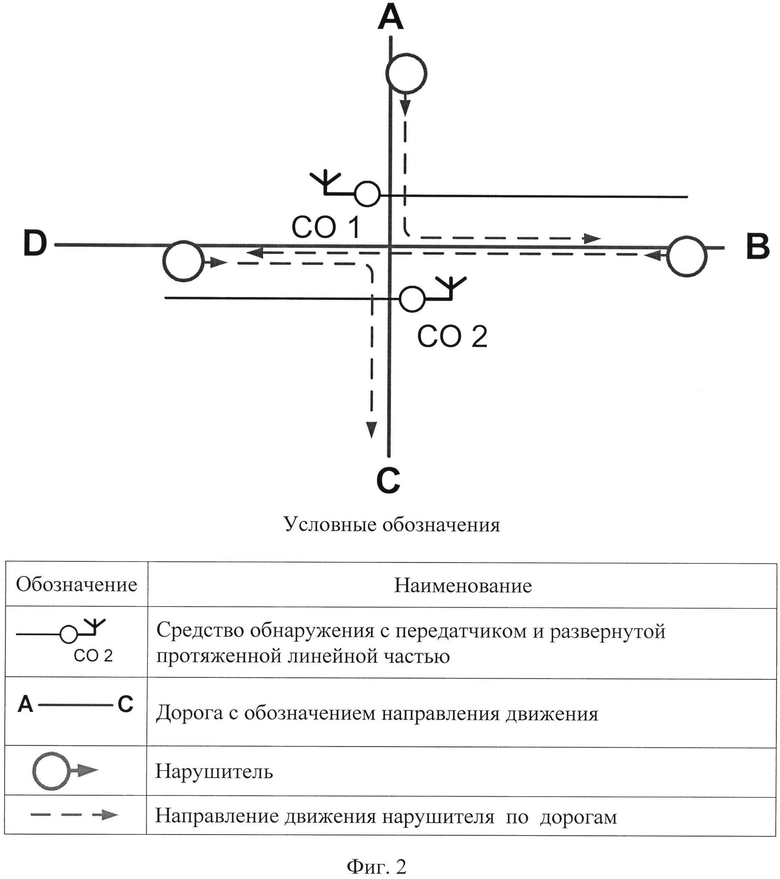
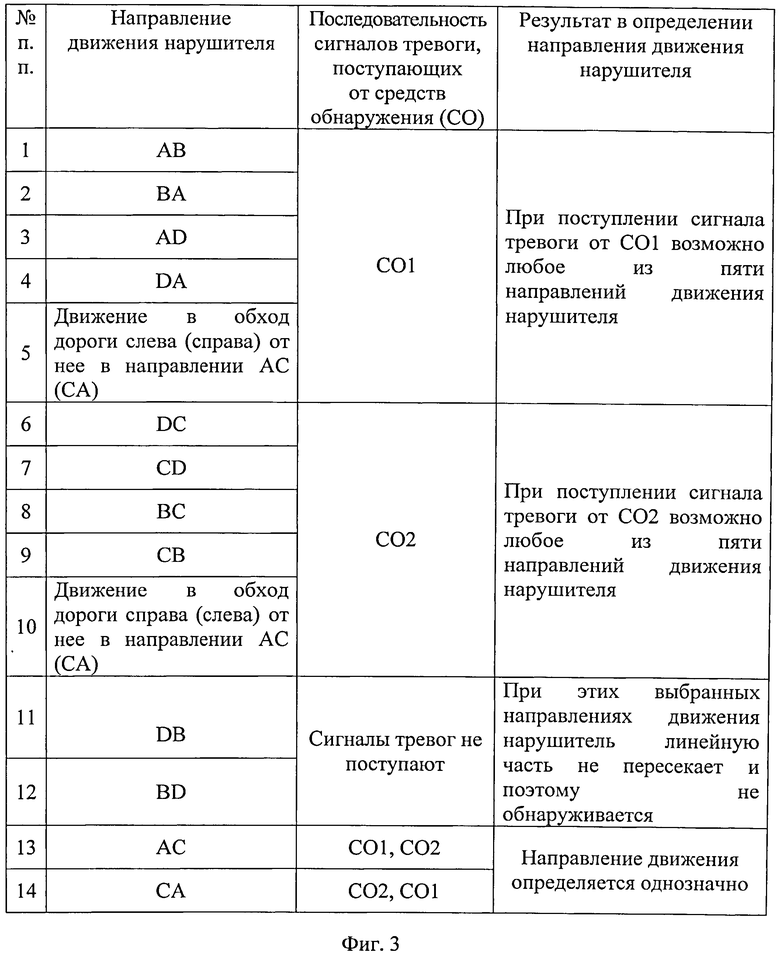
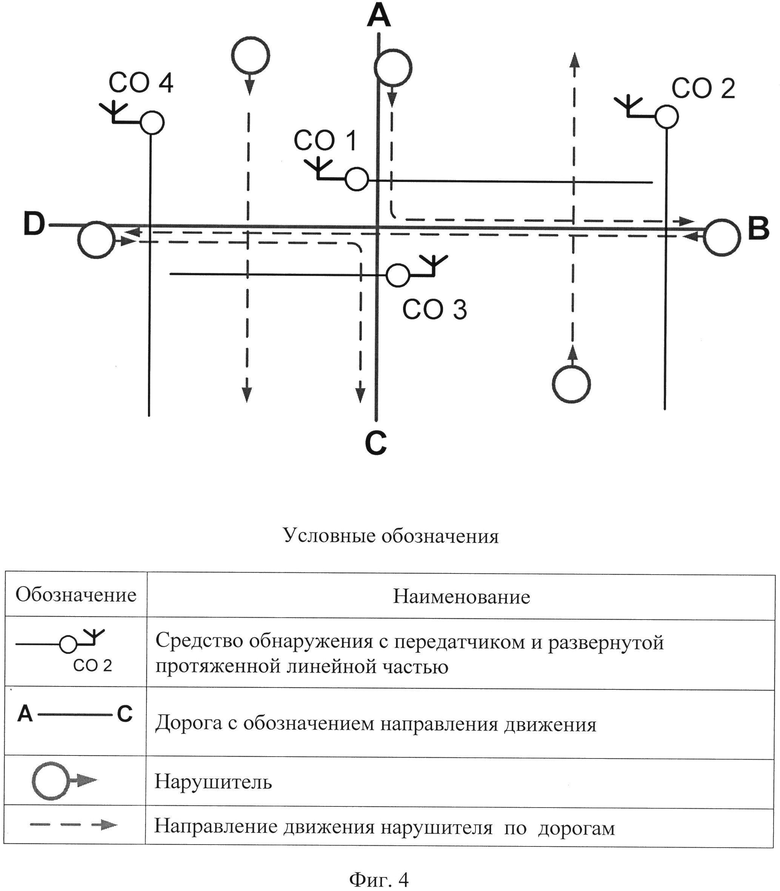
Известен способ сигнализационного прикрытия перекрестка дорог и путей его обхода с применением рассматриваемых СО, заключающийся в развертывании на перекрестке двух СО и последующем аналитическом выводе о направлении движения нарушителя по очередности и номерам СО, выдавших сигналы тревоги (фиг.1, 2) [2]. Недостатком этого способа является низкие вероятность обнаружения и точность указания направления движения нарушителя. Так, из четырнадцати возможных направлений движения (двенадцать через перекресток и два в обход его) два определяются однозначно, десять - двумя группами по пять, и при движении нарушителя в двух направлениях он не обнаруживается вообще (фиг.3). Также известен способ сигнализационного прикрытия перекрестков дорог, в которых для повышения вероятности обнаружения нарушителя и точности указания его направления движения разворачиваются четыре СО (фиг.4). Недостатком этого способа является необходимость увеличения числа СО по сравнению с известным первым способом.
Целью изобретения является повышение вероятности обнаружения и точности указания направления движения нарушителя при сигнализационном прикрытии перекрестка дорог и путей его обхода с применением только двух СО.
Для достижения поставленной цели разработан способ сигнализационного прикрытия перекрестка дорог и путей его обхода, заключающийся в развертывании на четырехстороннем перекрестке дорог и прилегающей к нему местности двух средств обнаружения с протяженной линейной частью таким образом, чтобы протяженная линейная часть каждого средства пересекала две разные дороги, одну - два раза, другую - один раз, с соотношением между расстояниями от центра перекрестка до точек пересечения 1:2:1, в применении алгоритма вывода, определяющего направление движения по последовательности из одного до четырех сигналов тревоги, поступивших от средств обнаружения за устанавливаемое временя их накопления, и соотношению между собой временных интервалов задержки между поступлением сигналов.
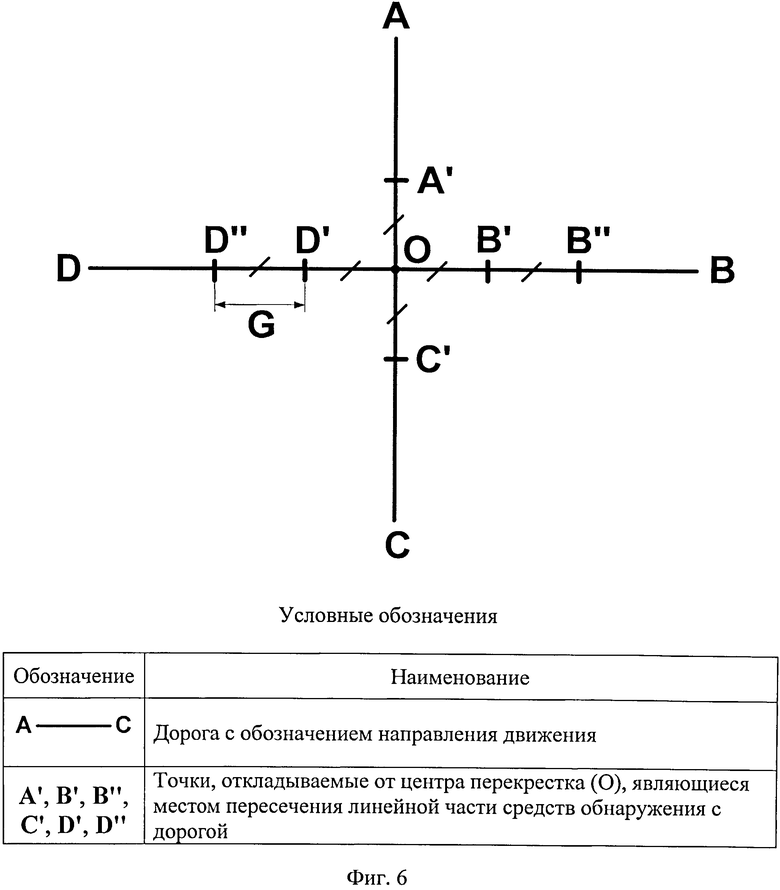
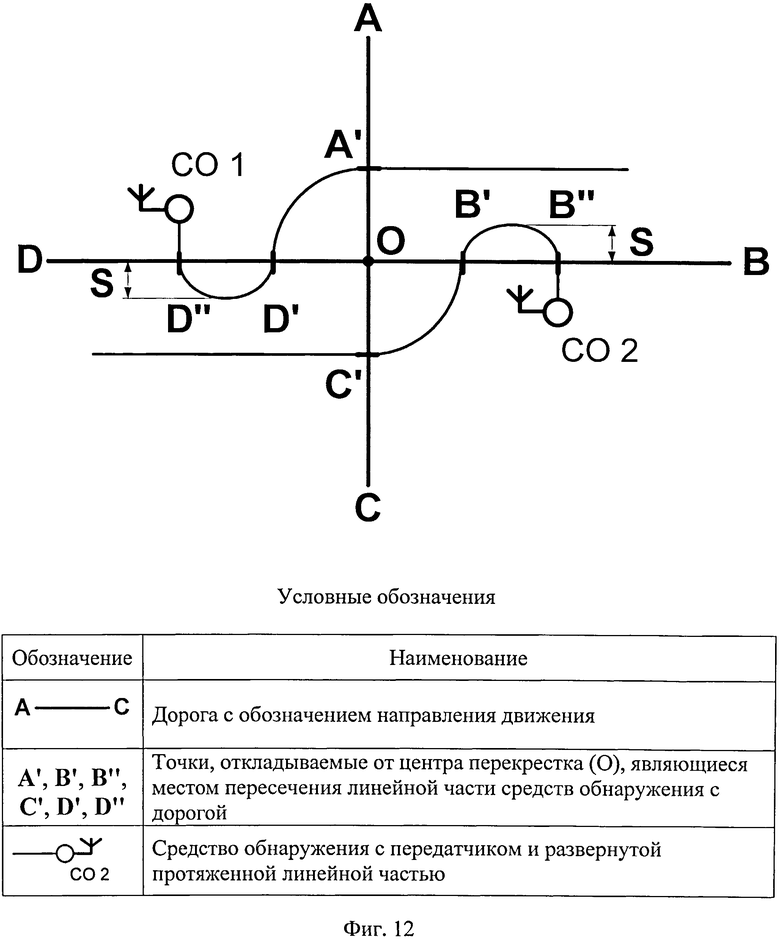
На перекрестке дорог ПЛЧ средств обнаружения развертываются таким образом, чтобы они прикрывали по две примыкающих к центру дороги, и отношение между расстояниями от центра перекрестка до точек пересечения ПЛЧ с дорогами было (фиг.5, 6):

где OB', OB'', ОС', OD', OD'', OA' - расстояния от центра перекрестка до точек пересечения ПЛЧ с дорогой, м.
Расстояния OA', OB', ОС', OD' наименьшие и их можно считать единичными:

где G - единичное расстояние от центра перекрестка до точек пересечения ПЛЧ с дорогой, м (фиг.6).
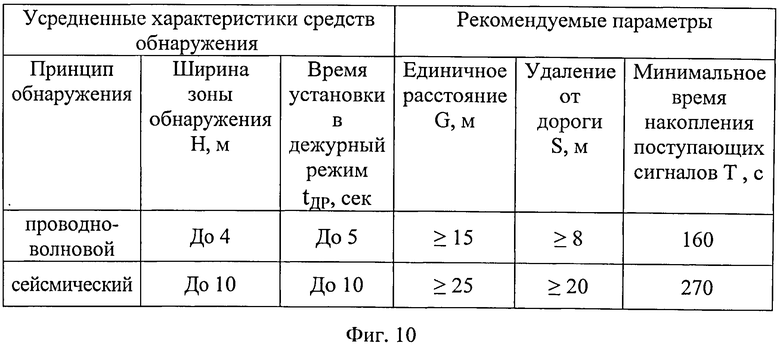
Чтобы исключить ситуацию, при которой нарушитель вторично пересекает протяженную линейную часть СО, не установившегося в дежурный режим после выхода нарушителя из его зоны обнаружения в ходе первого пересечения, значение единичного расстояния выбирается:

где tДР - время установки СО в дежурный режим, с;
Н - ширина зоны обнаружения средства обнаружения, м;
VMAX - верхний предел скорости нарушителя на перекрестке дорог, м/с.
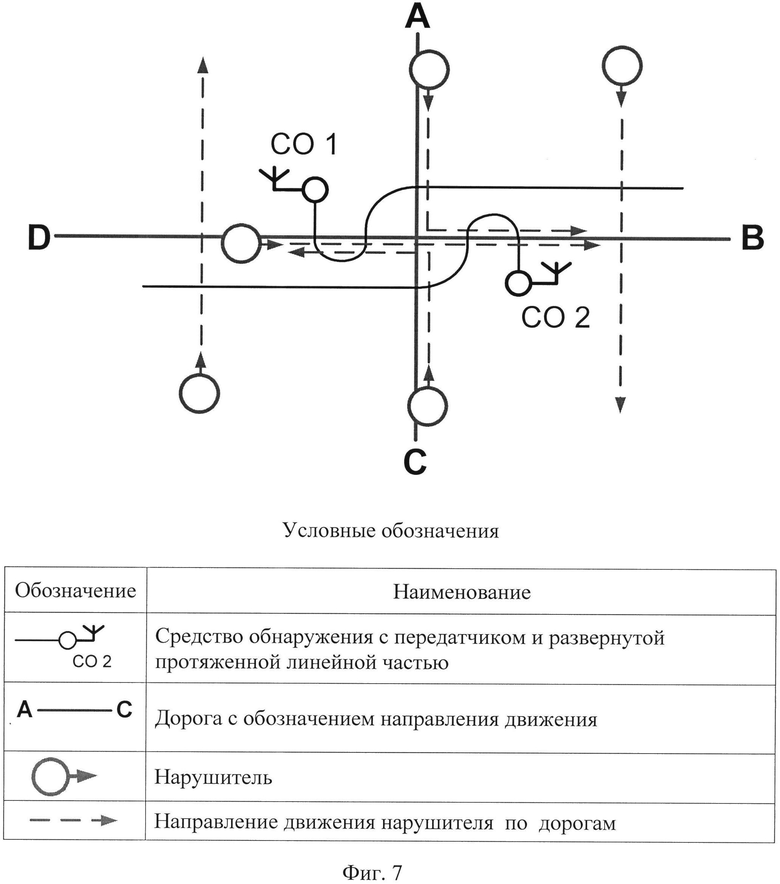
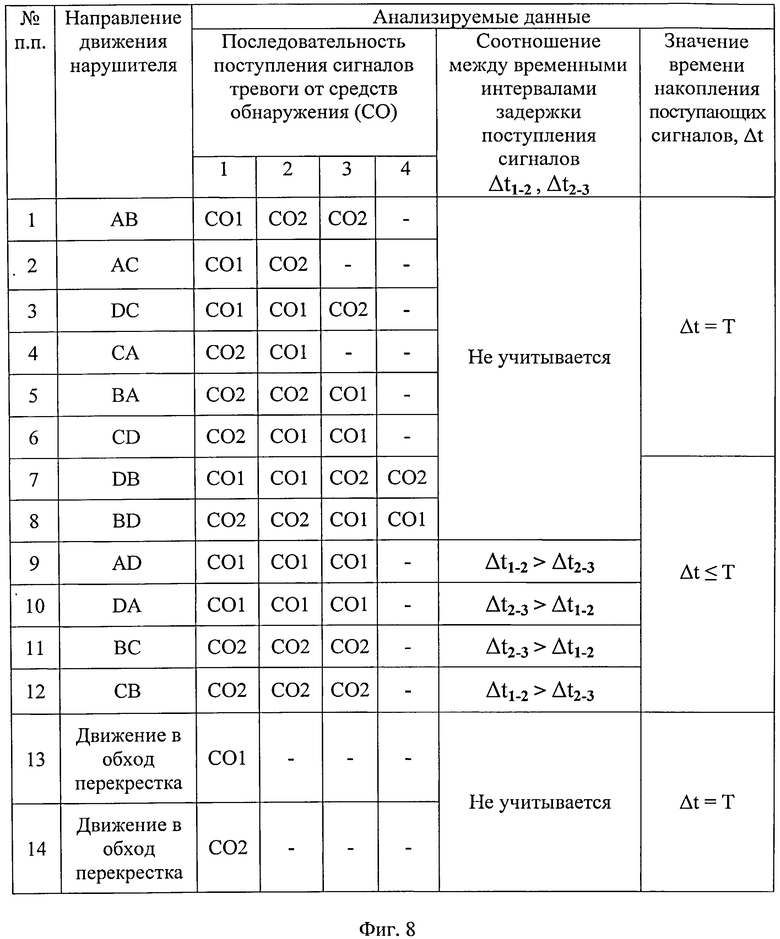
Движение нарушителя в обход перекрестка дорог определяется по единичному сигналу тревоги, поступающему от CO1: если он обходит вертикальную дорогу АС справа, или от CO2, если он обходит ее слева (фиг.7, 8).
Когда нарушитель движется через перекресток, возможна последовательность из двух, трех или четырех сигналов тревог от СО. Движение нарушителя через перекресток в направлениях: АВ, AC, DC, CA, ВА, CD, DB, BD определяется по уникальной последовательности сигналов для каждого из перечисленных направлений (фиг.8).
При движении нарушителя в направлениях: AD и DA, ВС и СВ поступают попарно одинаковые последовательности из трех сигналов. Поэтому направления движения AD и DA, ВС и СВ определяются по последовательности поступающих сигналов и по отношению временных интервалов задержки между поступлением сигналов, между первым и вторым сигналом (Δt1-2) и вторым и третьим (Δt2-3). В зависимости от направления движения (AD, СВ или DA, ВС) первая временная (Δt1-2) задержка постоянно больше или меньше второй (Δt2-3) (фиг.8):

где Δt1-2 - временной интервал задержки между поступлением первого и второго сигналов тревоги, с;
Δt2-3 - временной интервал задержки между поступлением второго и третьего сигналов тревоги, с.
Временной интервал Δt1-2 рассчитывается как:

где t1 - время поступления первого сигнала тревоги, с, начало отсчета - 0;
t2 - время поступления второго сигнала тревоги, с.
Временной интервал Δt2-3 рассчитывается как:

где t3 - время поступления третьего сигнала тревоги, с.
Отношения расстояний от центра перекрестка до точек пересечения ПЛЧ с дорогой определены таким образом, чтобы отношение Δt1-2 к Δt2-3 (меньше или больше) при движении нарушителя в заданном направлении сохранялось даже при неравномерном движении нарушителя, когда короткое расстояние между ПЛЧ нарушитель проходит на минимальной своей скорости, а более длинное расстояние на максимальной скорости.
Для направлений движения AD и CB:

где VH - скорость нарушителя на перекрестке, м/с.
VMAX, VMIN - верхний и нижний пределы скоростей нарушителя на перекрестке дорог, м/с.
Для направлений движения DA и BC:

Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности (фиг.9). Пределы этих скоростей определены практически, известны и подтверждены на основе экспериментальных исследований [4-6]. Верхний предел скорости нарушителя не превышает нижний более чем в полтора раза (фиг.9).

При этом отношение расстояний между участками протяженной линейной части, пересекающими дорогу, равно (фиг.6):

Таким образом, превышение отношений расстояний над отношениями пределов скоростей обеспечивает сохранение отношений временных интервалов (больше, меньше) при неравномерном движении нарушителя (см. формулы 7, 8).
В некоторых поступающих последовательностях (например, для направления DB и DC) первые сигналы могут совпадать (фиг.8). Для исключения ошибки вывода о направлении движения время накопления поступающих сигналов не может быть меньше минимального значения:


где Δt - время накопления поступающих сигналов, с;
Т - минимальное время накопления поступающих сигналов, с;
SMAX - максимальное расстояние, проходимое нарушителем через перекресток в заданном направлении от первого до последнего пересечения с линейной частью СО, м;
VMIN - нижний предел скорости нарушителя на перекрестке, м/с.
Двигаясь в заданном направлении через перекресток, нарушитель проходит от двух до четырех единичных расстояний G, тогда (фиг.6):

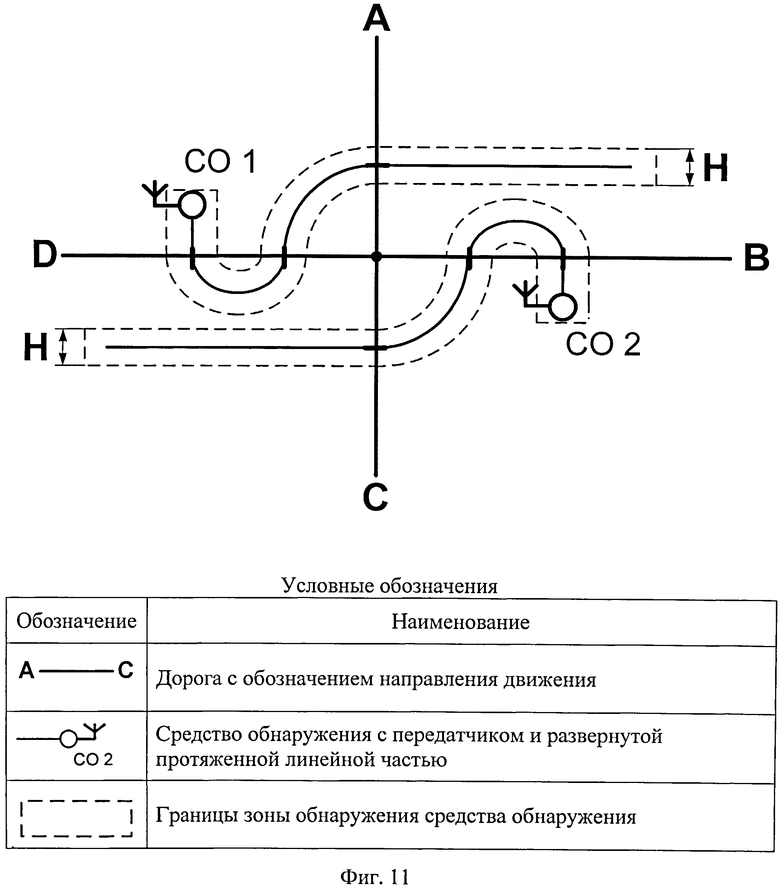
СО, построенные на проводно-волновом или вибрационном принципе обнаружения, имеют определенную ширину зоны обнаружения (Н) (фиг.11). Чтобы исключить попадание нарушителя в зону обнаружения СО, когда он двигается по дороге, вдоль которой развернута ПЛЧ, задается расстояние S (фиг.12):

где S - расстояние от дороги до участка линейной части, ограниченного точками В', В'' и D, 'D'', м;
Н - ширина зоны обнаружения средства обнаружения, м (фиг.11).
Ширина зоны обнаружения варьируется для различных СО (фиг.10).
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
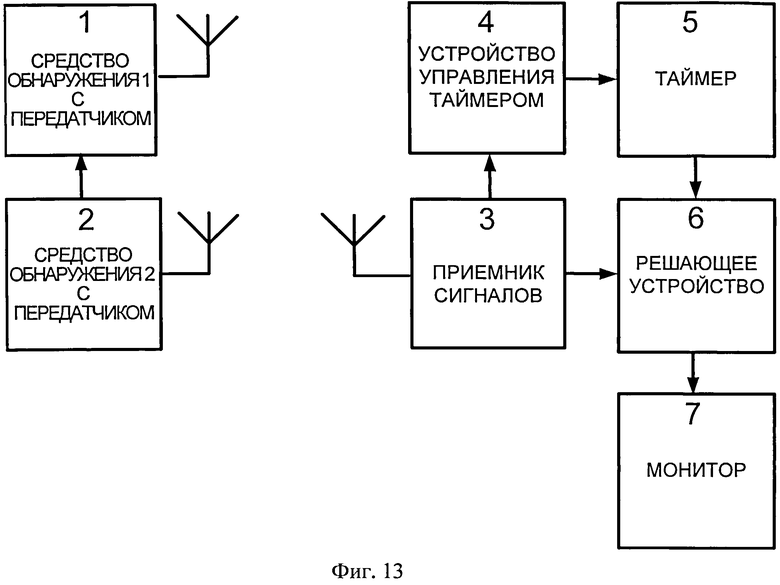
1. Развертывание средств 1, 2 обнаружения с передатчиками с учетом рекомендуемых параметров сигнализационного рубежа (фиг.6, 10, 12, 13).
2. Развертывание на местности аппаратуры приема сигналов, анализа и представления информации, включающей в себя: приемник 3 сигналов, устройство 4 управления таймером 3, таймер 3, решающее устройство 6, монитор 7 (фиг.13).
3. Определение минимального времени накопления поступающих сигналов Т (формула 12), (фиг.10).
4. Составление таблицы принятия решения (алгоритма вывода) о направлении движения нарушителя на четырехстороннем перекрестке и загрузку ее (его) в решающее устройство 6 (фиг.8).
5. Начало работы средств 1 или 2 обнаружения с передатчиком в дежурном режиме.
Основной этап начинается при движении нарушителя через перекресток дорог или в обход него и попаданием его в зону обнаружения одного из СО и включает следующие этапы.
1. Регистрация приемником 3 первого сигнала тревоги от одного из средств 1 или 2 обнаружения с передатчиком при пересечении нарушителем его зоны обнаружения, запуск таймера 5 устройством 4 управления таймером, начало отсчета им интервала времени Δt1-2, Δt и запись номера средства обнаружения в решающее устройство 6 (фиг.13).
2. Дальнейшая регистрация приемником 3 и сравнение решающим устройством 6 поступающей последовательности сигналов, соотношения между собой временных интервалов задержки между их поступлением с имеющимися в таблице принятия решения (алгоритмом вывода) о направлении движения нарушителя (фиг.8, 13).
3. Формирование одного из выводов о направлении движения нарушителя решающим устройством 6 в зависимости от дальнейших полученных данных, используемых для анализа (фиг.8):
а) вывода о движении нарушителя в обход перекрестка (справа от дороги АС или слева от дороги АС) при достижении значения времени накопления поступающих сигналов (Δt), отсчитываемого таймером 5, минимального времени накопления поступающих сигналов (Т) и не поступлении за это время других сигналов на приемник 3 сигналов от средств 1 или 2 обнаружения с передатчиком (фиг.8, 13).
б) вывода о движении нарушителя в одном из направлений: АВ, AC, DC, CA, ВА, CD, DB, BD при поступлении на решающее устройство 6 соответствующей последовательности сигналов от приемника 3 сигналов при срабатывании средств 1 и 2 обнаружения с передатчиком и достижении значения времени накопления поступающих сигналов (Δt), отсчитываемого таймером 5, минимального времени накопления поступающих сигналов (Т) (фиг.8, 13).
в) вывода о движении нарушителя в одном из направлений: AD, DA, ВС, СВ при поступлении на решающее устройство 6 соответствующей последовательности сигналов от приемника 3 сигналов при срабатывании средств 1 или 2 обнаружения с передатчиком и зарегистрированных таймером 5 интервалов времени Δt1-2 и Δt2-3 (фиг.8,13).
4. Обнуление таймера 5 устройством 4 управления таймером. Выведение результата о направлении движения нарушителя на монитор 7 (фиг.13).
Сущность изобретения поясняется графическими материалами, где на:
- фиг.1 представлена схема развертывания протяженных линейных частей двух средств обнаружения в известном способе сигнализационного прикрытия перекрестка дорог и путей его обхода с примерами направлений движения нарушителя;
- фиг.2 - схема развертывания протяженных линейных частей двух средств обнаружения в известном способе сигнализационного прикрытия перекрестка дорог и путей его обхода с примерами направлений движения нарушителя через перекресток;
- фиг.3 - таблица принятия решения (алгоритм вывода) о направлении движения нарушителя на перекрестке дорог для известного способа сигнализационного прикрытия перекрестка дорог и путей его обхода с развертыванием протяженных линейных частей двух средств обнаружения;
- фиг.4 - схема развертывания четырех протяженных линейных частей средств обнаружения в известном способе сигнализационного прикрытия перекрестка дорог и путей его обхода;
- фиг.5 - схема развертывания протяженных линейных частей средств обнаружения в предлагаемом способе сигнализационного прикрытия перекрестка дорог и путей его обхода;
- фиг.6 - схема перекрестка дорог с отмеченными на нем расстояниями от точек пересечения протяженных линейных частей до центра перекрестка;
- фиг.7 - схема развертывания протяженных линейных частей средств обнаружения предлагаемого способа сигнализационного прикрытия перекрестка дорог и путей его обхода с примерами направлений движения нарушителя;
- фиг.8 - таблица принятия решения (алгоритма вывода) о направлении движения нарушителя на перекрестке дорог;
- фиг.9 - таблица диапазонов скоростей нарушителя на различных участках местности;
- фиг.10 - сводная таблица некоторых усредненных тактико-технических показателей средств обнаружения и рекомендуемых геометрических размеров сигнализационного рубежа;
- фиг.11 - схема границ зоны обнаружения средств обнаружения, развернутых на перекрестке;
- фиг.12 - схема развертывания средств обнаружения и их протяженных линейных частей с обозначением основных размеров (расстояний);
- фиг.13 - структурная схема сбора, обработки и отображения информации по радиоканалу.
Технический результат состоит в повышении вероятности обнаружения (обнаружение нарушителя при его движении во всех направлениях) и точности указания направления движения нарушителя (определяются все направления движения) при сигнализационном прикрытии перекрестка дорог и путей его обхода с применением только двух СО.
Источники информации
1. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов. - М.: Горячая - Телеком, 2004. - 367 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков. - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
5. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
6. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЁСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2014 |
|
RU2546303C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЧЕТЫРЕХСТОРОННЕГО ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2599603C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2606045C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА ПЕРЕКРЕСТКЕ ДОРОГ | 2012 |
|
RU2523068C2 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2012 |
|
RU2514126C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА Т - ОБРАЗНОМ ПЕРЕКРЕСТКЕ ДОРОГ | 2015 |
|
RU2599610C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ДОРОГОЙ | 2015 |
|
RU2605507C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ Т-ОБРАЗНОГО ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2615949C1 |

Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной линейной частью (ПЛЧ), построенных на проводно-волновом или вибрационном принципе обнаружения, для сигнализационного прикрытия четырехсторонних перекрестков дорог и путей их обхода. Технический результат состоит в повышении вероятности обнаружения (обнаружение нарушителя при его движении во всех направлениях) и точности указания направления движения нарушителя (определяются все направления движения) при сигнализационном прикрытии перекрестка дорог и путей его обхода с применением только двух СО. Способ заключается в развертывании на четырехстороннем перекрестке дорог и прилегающей к нему местности двух средств обнаружения с протяженной линейной частью таким образом, чтобы протяженная линейная часть каждого средства пересекала две разные дороги, одну - два раза, другую - один раз, с соотношением между расстояниями от центра перекрестка до точек пересечения 1:2:1 и в применении алгоритма вывода, определяющего направление движения по последовательности из одного до четырех сигналов тревоги, поступивших от средств обнаружения за устанавливаемое временя их накопления, и соотношению между собой временных интервалов задержки между поступлением сигналов. Способ включает подготовительный этап с развертыванием по разработанной схеме ПЛЧ двух СО на местности и основной этап, который начинается с момента попадания нарушителя в зону обнаружения одного из СО, в течение которого нарушитель обнаруживается, и определяется направление его движения. 13 ил. 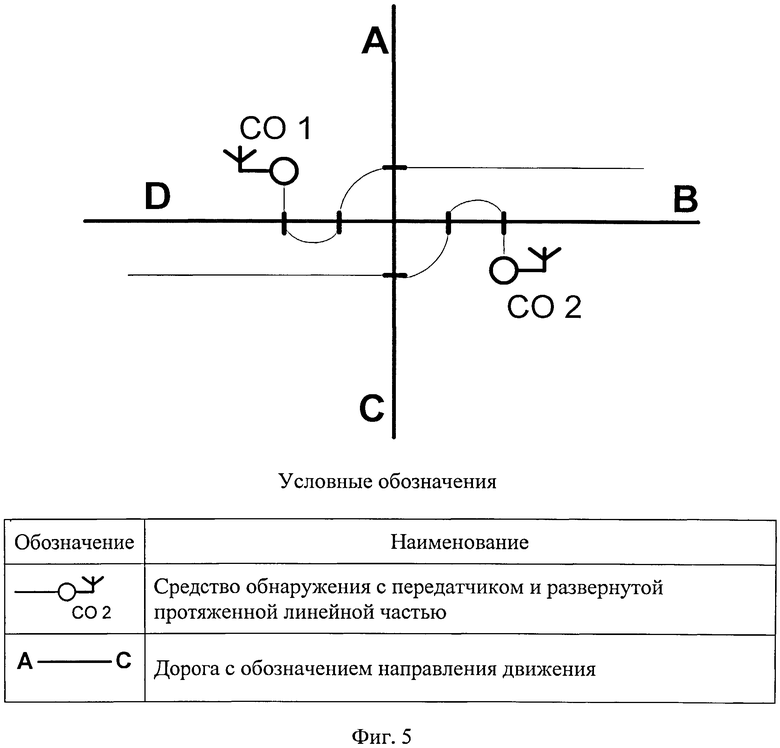
Способ сигнализационного прикрытия перекрестка дорог и путей его обхода, заключающийся в развертывании на четырехстороннем перекрестке дорог и прилегающей к нему местности двух средств обнаружения с протяженной линейной частью, выдаче сигналов тревоги средствами обнаружения, анализе числа этих сигналов и их очередности, отличающийся тем, что протяженная линейная часть каждого средства пересекает две разные дороги, одну - два раза, другую - один раз, с соотношением между расстояниями от центра перекрестка до точек пересечения 1:2:1, при этом применяется алгоритм вывода, определяющий направление движения по последовательности из одного до четырех сигналов тревоги, поступивших от средств обнаружения за устанавливаемое временя их накопления, и соотношению между собой временных интервалов задержки между поступлением сигналов.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ ОБРЫВНЫМИ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2011 |
|
RU2485596C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ОПРЕДЕЛЕНИЕМ НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2010 |
|
RU2434296C1 |
| ПРОВОДНО-ВОЛНОВОЕ СРЕДСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 1999 |
|
RU2157563C1 |
| US 5559496 A, 24.09.1996 | |||
| US 4458240 A1, 03.07.1984 | |||

