Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной обрывной линейной частью (ПОЛЧ) на местности, пересеченной сетью дорог, диапазон скоростей движения нарушителя по которым известен [1, 2].
Для увеличения вероятности обнаружения нарушителя широко используются СО с ПОЛЧ, позволяющие контролировать участки местности шириной до 1-1,5 км. Во многом успех задержания нарушителя зависит не только от обнаружения его на местности, но также и от определения направления его движения.
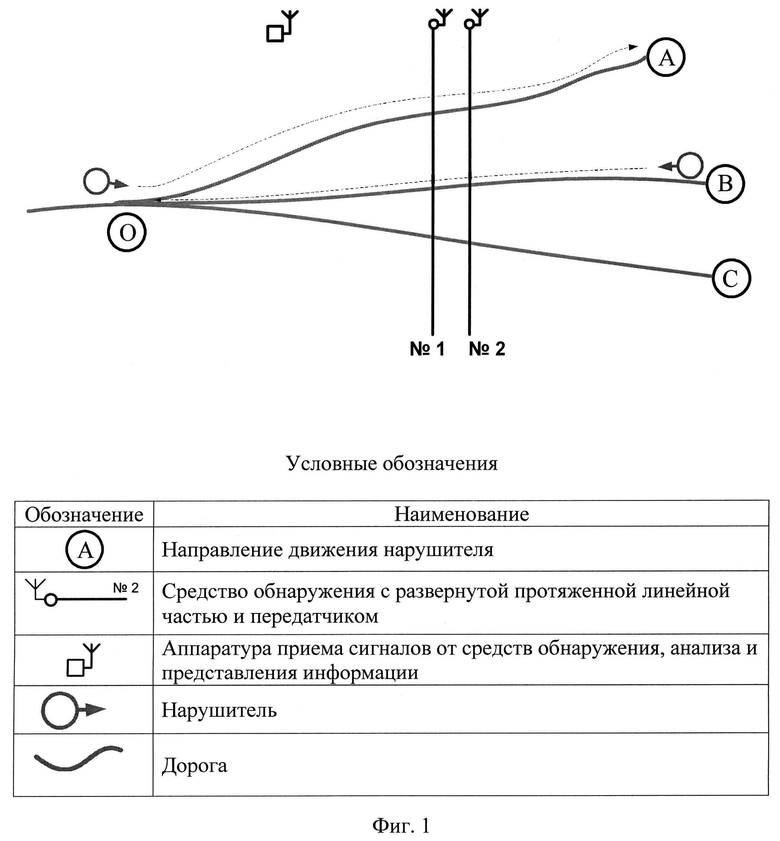
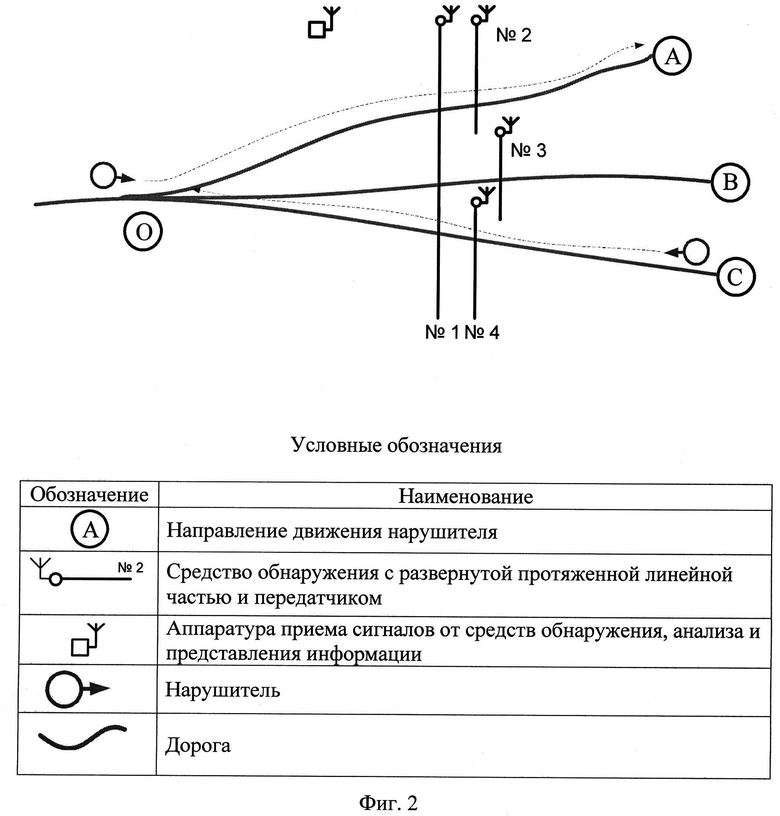
Известен способ определения стороны, в которую движется нарушитель, заключающийся в развертывании двух СО, линейные части которых параллельны друг другу и находятся на расстоянии 25-40 метров (фиг.1). Сторона, в которую движется нарушитель, определяется по очередности поступления сигналов тревоги от СО. Для определения направления движения нарушителя требуется развернуть на местности более двух СО [2, 3]. Так, известен способ определения направления движения нарушителя, заключающийся в развертывании СО, контролирующего весь рубеж охраны, и дополнительных СО на каждой дороге (тропе), проходящей по местности (фиг.2). Направление движения (дорога, тропа) определяется по очередности и номерам СО, выдавших сигнал тревоги.
Недостатком этого способа является необходимость развертывания дополнительных СО на каждом возможном направлении движения (дороги, тропы).
Целью изобретения является определение направления движения нарушителя двумя СО с ПОЛЧ без развертывания дополнительных СО.
Для достижения поставленной цели разработан способ определения направления движения нарушителя, заключающийся в развертывании на локальном участке местности сигнализационного рубежа с заданными геометрическими размерами, включающего два СО с ПОЛЧ, с последующим определением направления движения по алгоритму, устанавливающему принадлежность полученного временного интервала задержки между поочередным поступлением сигналов тревоги от средств обнаружения к одному из трех диапазонов временных интервалов, рассчитанных аналитически для каждого из направлений движения, с учетом возможного диапазона скоростей нарушителя на данной местности и индивидуальных расстояний между обрывными линейными частями на этих участках.
Сущность изобретения поясняется графическими материалами, где на:
- фиг.1 представлена схема известного способа определения стороны, в которую движется нарушитель;
- фиг.2 - схема известного способа определения направления движения нарушителя;
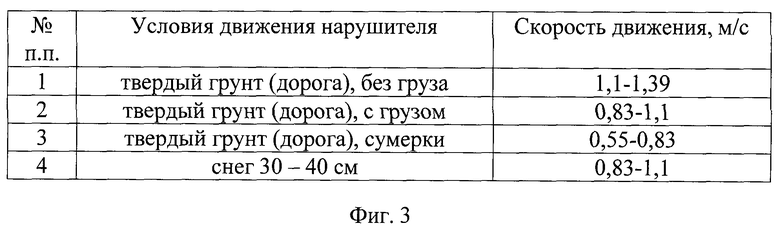
- фиг.3 - таблица диапазонов скоростей нарушителя на различных участках местности;
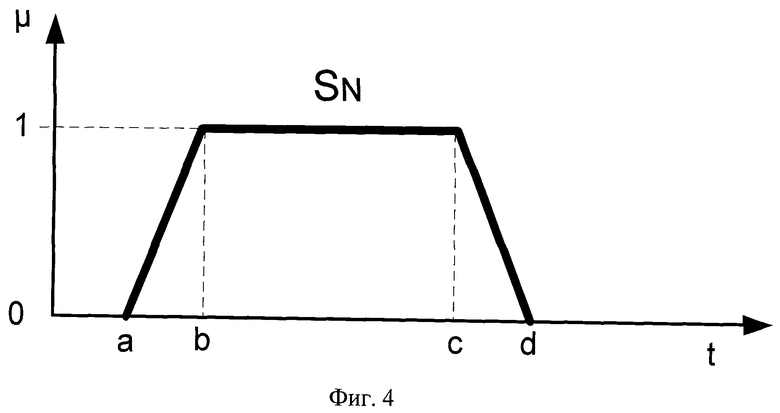
- фиг.4 - график функции зависимости временного интервала задержки поступления сигналов тревог от средств обнаружения на конкретном направлении;
- фиг.5 - схема развертывания сигнализационного рубежа на местности при дистанционном контроле трех дорог;
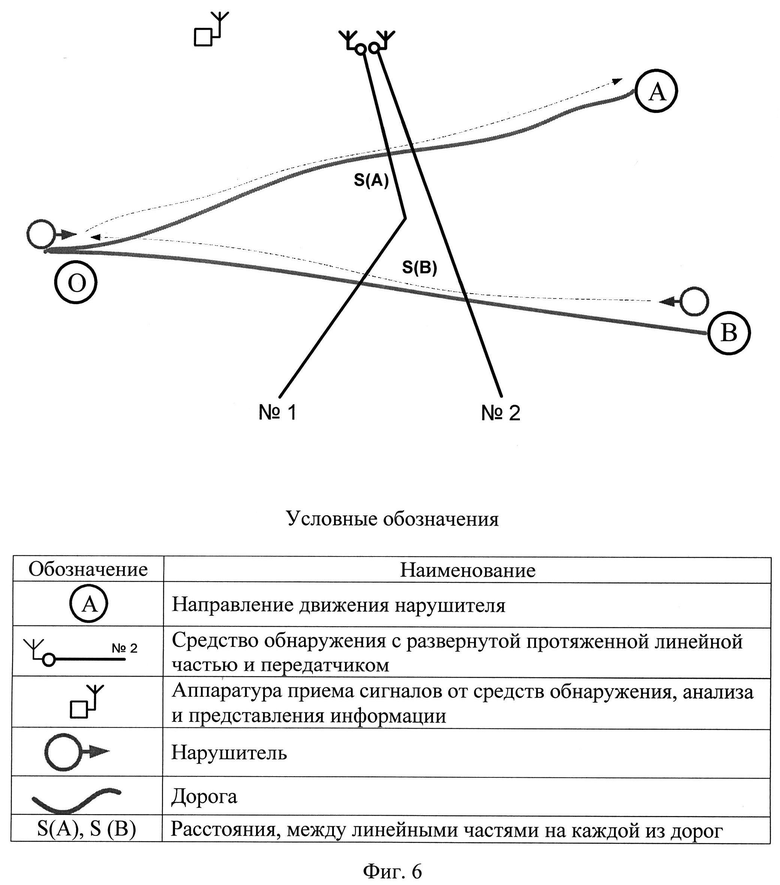
- фиг.6 - схема развертывания сигнализационного рубежа на местности при дистанционном контроле двух дорог;
- фиг.7 - схема сигнализационного рубежа при дистанционном контроле трех дорог;
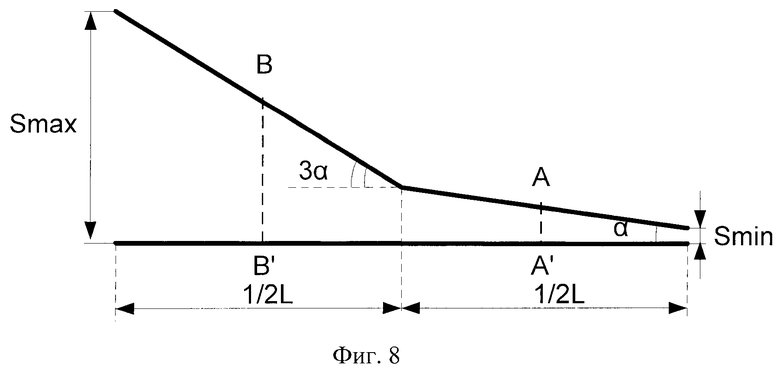
- фиг.8 - схема сигнализационного рубежа при дистанционном контроле двух дорог;
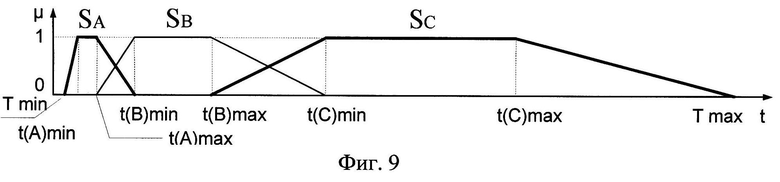
- фиг.9 - графики функций зависимости временного интервала задержки поступления сигнала тревоги от выбранного направления движения нарушителя для трех дорог;
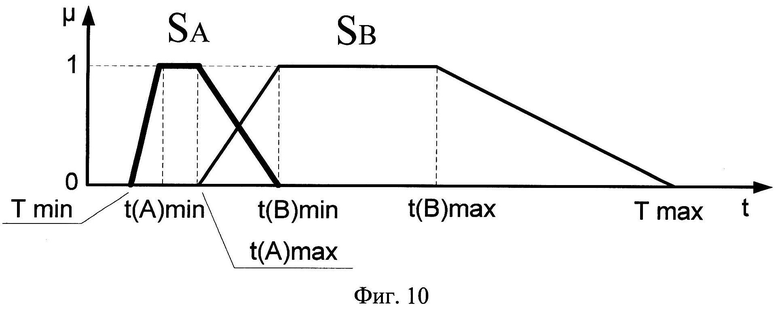
- фиг.10 - графики функций зависимости временного интервала задержки поступления сигнала тревоги от выбранного направления движения нарушителя для двух дорог;
- фиг.11 - таблица принятия решения о направлении движения нарушителя аппаратурой анализа и представления информации;
- фиг.12 - пример определения направления движения по графику;
- фиг.13 - таблица вариантов значений параметров сигнализационного рубежа;
- фиг.14 - структурная схема сбора, анализа и отображения информации по радиоканалу.
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Выбор участка местности для развертывания СО, определение возможных пределов скоростей движения нарушителя (фиг.3, 5, 6).
2. Расчет параметров рубежа с учетом количества контролируемых дорог (троп) (фиг.7, 8, 13).
3. Развертывание на местности ПОЛЧ двух СО с передатчиками (фиг.8, 9).
4. Нанесение сигнализационного рубежа на схему (карту) местности.
5. Расчет параметров и построение графиков зависимости между направлением движения нарушителя и временными интервалами задержки поступления сигналов от СО (фиг.9, 10).
Основной этап начинается при пересечении нарушителем сигнализационного рубежа и включает (фиг.3):
1. Регистрацию сигнала тревоги от СО №1 (№2), передачу его на аппаратуру анализа и представления информации и начало отсчета времени таймером (фиг.14).
2. Регистрацию сигнала тревоги от СО №2 (№1), передачу его на аппаратуру анализа и представления информации, остановку работы таймера и определение временного интервала задержки между поступлением сигналов (Δt) (фиг.14).
3. Определение аппаратурой анализа и представления информации по полученному временному интервалу At и очередности срабатывания СО о направлении движения нарушителя (фиг.11, 12).
Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности (фиг.3). Пределы этих скоростей определены практически, известны и подтверждены на основе экспериментальных исследований [4-6]. При этом отношение верхнего значения скорости (Vmax) к нижнему (Vmin) лежит в пределах 1,5…2,0 [4-6]:

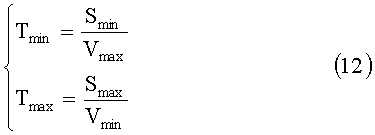
Таким образом, конкретное расстояние S нарушитель может пройти за определенный интервал времени (Δts), ограниченный максимальным (tmax) и минимальным (tmin) значениями:

Предельные значения интервалов времени находятся по формуле:
где tmin, tmax - минимальное и максимальное значения интервалов времени, затрачиваемые нарушителем при пересечении сигнализационного рубежа в направлении N, с;
ΔSN - глубина рубежа в направлении N, м.
В настоящее время в технике широко применяется технология нечеткого вывода [7]. Следуя ей, рассматриваемый интервал времени можно представить графически в виде трапециевидной функции, которая показывает, что конкретное расстояние SN нарушитель может пройти за определенный период времени, у которого есть нижнее значение (b) (при максимальной скорости Vmax) и верхнее значение (с) (при минимальной скорости Vmin). В этих пределах уверенность в достоверности вывода (µ) о том, что могло быть пройдено расстояние SN, максимальная и равна единице. При меньших (от (а) до (b)) или больших (от (с) до (d)) значениях времени уверенность в достоверности вывода (µ) о том, что пройдено расстояние SN, меньше единицы (фиг.4) [7].
Как правило, через полосу местности шириной 1-1,5 км может проходить не более 2-3 дорог (троп) [4], поэтому рассматриваются случаи для дистанционного контроля двух и трех направлений движения (дорог) на местности. Сигнализационный рубеж охраны из линейных частей двух СО развертывается поперек возможных направлений движения нарушителя. Геометрические размеры сигнализационного рубежа задаются таким образом, чтобы отношение интервалов времени между нарушением первой и второй линейных частей (Δt) были различными и зависели от конкретного направления движения (фиг.5, 6) [8]:
где SA, SB, SC - расстояния, проходимые нарушителем линейными частями №1 и №2 при движении в направлении OA (АО), ОВ (ВО), ОС (СО), м;
ΔtA, ΔtB, Δtc - временные интервалы задержки поступления сигналов от СО при движении нарушителя в одном из указанных направлении, max -максимальное значение, min - минимальное, с;
Vmax, Vmin - максимальное и минимальное значение скоростей нарушителя, м/с.
Зная отношение расстояний между соседними линейными частями по всей длине сигнализационного рубежа охраны, сравнив их с отношением измеренных временных интервалов и учтя очередность срабатывания СО, определяется направление движения.
Чтобы временные интервалы ΔtA, ΔtB, Δtc не пересекались при возможном движении нарушителя на предельных скоростях, параметры сигнализационного рубежа задаются из условия, чтобы отношение расстояний, проходимых нарушителем на близлежащих направлениях, было больше отношения верхнего и нижнего пределов его скоростей:
С учетом того, что отношение верхнего значения скорости (Vmax) к нижнему (Vmin) лежит в пределах 1,5…2,0 (см. формулу 1):

Для выполнения указанного условия вторая линейная часть имеет кусочно-линейную структуру (фиг.7, 8). Параметры сигнализационного рубежа при прикрытии трех дорог (троп) рассчитываются по формуле:
где L - протяженность линейной части, м;
α - угол между линейными частями №1 и №2;
Smax, Smin - максимальное (минимальное) расстояние между линейными частями по перпендикуляру соответственно, м.
Параметры сигнализационного рубежа при прикрытии двух дорог (троп) рассчитываются по формуле:

График зависимости временных интервалов задержки от конкретного выбранного направления движения представляет собой трапецию (фиг.4). Ее числовые параметры a, b, c, d принимают действительные значения и рассчитываются для направлений движения OA (АО), ОВ (ВО) и ОС (СО) соответственно (фиг.9, 10).
Параметры графика при сигнализационном прикрытии трех дорог рассчитываются по формуле [7]:

где S(A), S(B), S(C) - расстояния, проходимые нарушителем между линейными частями в заданном направлении, м.
Параметры графика при сигнализационном прикрытии двух дорог рассчитываются по формуле [7]:

Весь рассматриваемый временной интервал (ΔT) включает преодоление сигнализационного рубежа по его границам (Smin, Smax) (фиг.7, 8):

Предельные значения времени находятся по формуле:
По очередности получения сигналов и временному интервалу задержек между ними, выражаемой через график функции зависимости временного интервала задержки поступления сигналов тревог от СО на конкретном направлении S (t), формируется вывод о направлении движения нарушителя. Так, если поступили два сигнала тревоги от СО №1 и №2 с интервалом задержки Δtn, необходимо отложить его по оси абсцисс и через точки пересечения с графиками функций определить направление движения нарушителя.
Пример №1. Сигналы тревоги поступили в последовательности СО №1 и №2 с временной задержкой Δt2. Измеренный временной интервал и последовательность поступления сигналов соответствуют движению нарушителя в направлении ОС, уверенность в достоверности вывода (µ=1) (фиг.11, 12).
В случае, если нарушитель предпримет попытку движения вне дорог, значения временных интервалов сместятся к границе двух соседних графиков, что, естественно, должно интерпретироваться как попытка движения между двух соседних дорог.
Пример №2. Сигналы тревоги поступили в последовательности СО №2 и №1 с временной задержкой Δt2. Измеренный временной интервал и последовательность поступления сигналов соответствуют движению нарушителя в направлении между АО и ВО, ближе к направлению ВО, уверенность в достоверности вывода (µ равно 0,7), чем к АО, уверенность в достоверности вывода (µ равно 0,3) (фиг.11, 12).
Технический результат состоит в определении направления движения нарушителя только двумя средствами обнаружения с протяженной обрывной линейной частью без развертывания дополнительных средств обнаружения.
Источники информации
1. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г.Магауенов. - М.: Горячая-Телеком, 2004. - 367 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г.Коршняков. - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Прибор сигнализационный обрывного типа «Графит»: Паспорт и инструкция по эксплуатации ЮСДП. 425112.001 ПС. - Пенза, 2003. - 19 с.
4. Псарев А.А. Военная топография: учебник / А.А.Псарев. - М.: Воениздат, 1986. - 384 с.
5. Баленко С.В. Школа выживания / С.В.Баленко. - М.: 1994. - 140 с.
6. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: научно-практическое пособие. Ч.2.1 В.В.Шумов. - М.: Просвещение, 1996. - 196 с.
7. Леоненков А.В. Нечеткое моделирование в среде MATLAB и fuzzy TECH / А.В.Леоненков. - СПб.: БХВ - Петербург, 2005. - 736 с.
8. Справочник по элементарной математике / Под ред. М.Я.Ворновицкого. - М.: Наука, 1964. - 420 с.





Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной обрывной линейной частью (ПОЛЧ) на местности, пересеченной сетью дорог (троп), диапазон скоростей движения нарушителя по которым известен. Технический результат - определение направления осуществляется без развертывания дополнительных средств обнаружения. Способ заключается в развертывании на локальном участке местности сигнализационного рубежа с заданными геометрическими размерами, включающего два СО с ПОЛЧ, с последующим определением направления движения по алгоритму, устанавливающему принадлежность полученного временного интервала задержки между поочередным поступлением сигналов тревоги от средств обнаружения к одному из трех диапазонов временных интервалов, рассчитанных аналитически для каждого из направлений движения, с учетом возможного диапазона скоростей нарушителя на данной местности и индивидуальных расстояний между обрывными линейными частями на этих участках. 14 ил.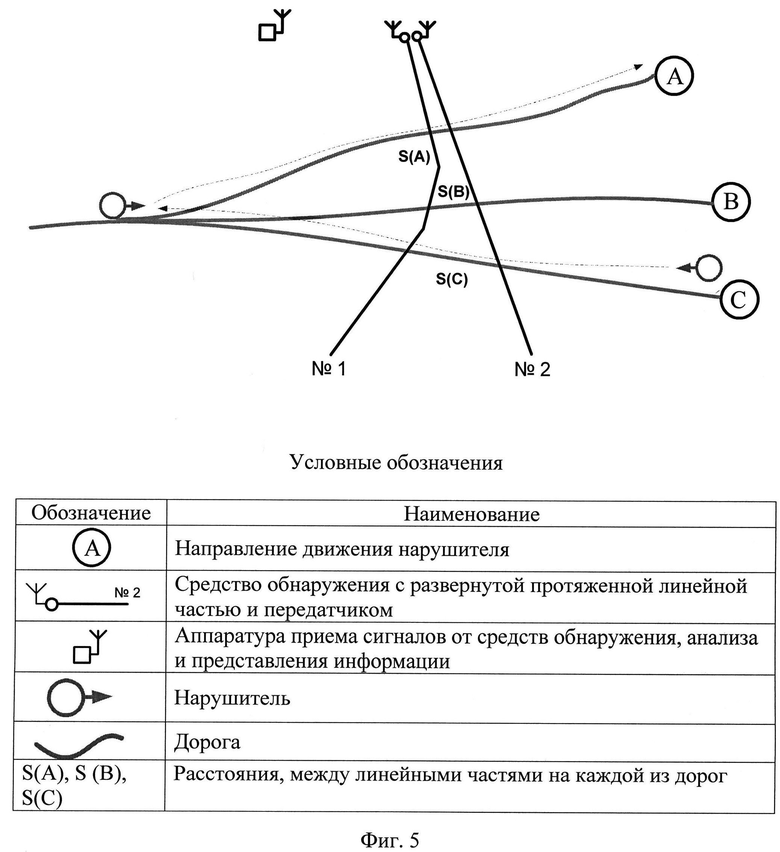
Способ определения направления движения нарушителя, заключающийся в контроле двух или трех дорог (троп) средствами обнаружения с протяженной обрывной линейной частью, отличающийся тем, что при конструктивном выполнении рубежа охраны первая линейная часть разворачивается поперек дорог (троп) в линию, вторая линейная часть разбивается на два или три условных участка и разворачивается по линейно-кусочной структуре так, чтобы каждый из участков пересекал одну из дорог (троп), угол наклона второй линейной части к первой от участка к участку увеличивался втрое, само направление движения определяется по алгоритму, устанавливающему принадлежность полученного временного интервала задержки между поочередным поступлением сигналов тревоги от средств обнаружения к одному из трех диапазонов временных интервалов, рассчитанных аналитически для каждого из направлений движения, с учетом возможного диапазона скоростей нарушителя на данной местности и индивидуальных расстояний между обрывными линейными частями на этих участках.

