Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной линейной частью (ПЛЧ) в виде гибкого кабеля, построенных на проводно-волновом или сейсмическом принципах обнаружения, для сигнализационного прикрытия трехсторонней развилки дороги и путей их обхода.
Как правило, маршрут своего движения нарушитель строит с учетом существующей сети дорог на местности. Он двигается или по самой дороге, или вдоль нее на безопасном удалении от нее (в обход). Во многом успех задержания нарушителя зависит от знания силами реагирования направления его движения, поэтому сигнализационному прикрытию дорог и путей их обхода уделяется значительное внимание [1].
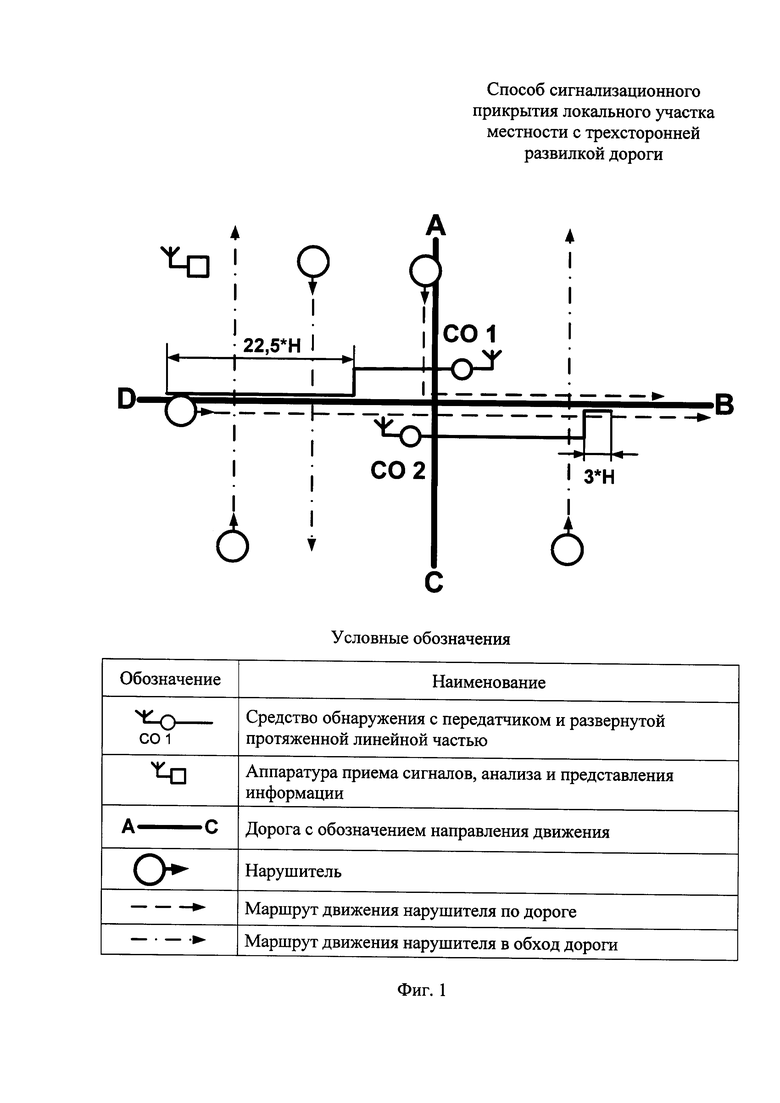
Одним из наиболее часто встречающихся элементов дорожной сети является трехсторонняя развилка дороги. Топология трехсторонней развилки дороги и четырехстороннего перекрестка дорог одинаковая и через них обоих возможно движение в 12 направлениях: АВ, AC, AD, ВА, ВС, BD, СВ, СА, CD, DB, DA, DC (фиг. 1, 2).
Прототипом предлагаемого способа является способ обнаружения нарушителя и определения направления его движения на перекрестке дорог и путях его обхода [2]. Способ заключается в развертывании на четырехстороннем перекрестке дорог и прилегающей к нему местности двух СО с протяженной линейной частью, таким образом, чтобы ПЛЧ каждого СО одну из дорог пересекала поперек на удалении от центра перекрестка, равном трехкратному значению ширины зоны обнаружения (ЗО) самого СО, и участком определенной длины лежала в непосредственной близости вдоль другой дороги, покрывая ее своей ЗО, соотношение ширины ЗО СО к длинам участков 1:3:22,5, и применении алгоритма, определяющего направление движения нарушителя по числу, очередности поступления и отношению между длительностями сигналов тревоги (фиг. 1).
Этот способ имеет существенный недостаток - сложную схему развертывания ПЛЧ и связанную с этим невозможность применения СО, которые по своим тактико-техническим характеристикам (ТТХ) имеют ширину зоны обнаружения до 10 метров и длину ПЛЧ до 250 метров. Промышленностью, как правило, изготавливается СО с длиной ПЛЧ 250 или 500 метров [3, 4].
Так, в схеме известного способа у ПЛЧ одного из двух СО есть участок длиной, в 22,5 раза превышающей ширину ЗО, который необходимо разворачивать вдоль дороги [2]. При ширине зоны обнаружения до 10 метров эта длина должна составлять 225 метров (90% от всей ПЛЧ длиной до 250 м). Очевидно, что при таких требованиях к размерам участка ПЛЧ, разворачиваемого вдоль дороги, известный способ для СО с указанными выше ТТХ не применим (фиг. 2). В то же самое время такие СО широко распространены, это главным образом кабельные сейсмические СО [3, 4]. Сложность схемы развертывания СО в известном способе заключается еще и в том, что работа по разворачиванию ПЛЧ вдоль дороги требует выдерживания определенного расстояния на протяжении нескольких сот метров, чтобы ЗО покрывала ее, также требуется тщательная маскировка этих нескольких сот метров ПЛЧ из-за близкого удаления от ее дороги.
Целью изобретения является упрощение схемы развертывания ПЛЧ СО и получение возможности применять СО, которые по своим ТТХ имеют ширину зоны обнаружения до 10 метров и длину ПЛЧ до 250 метров.
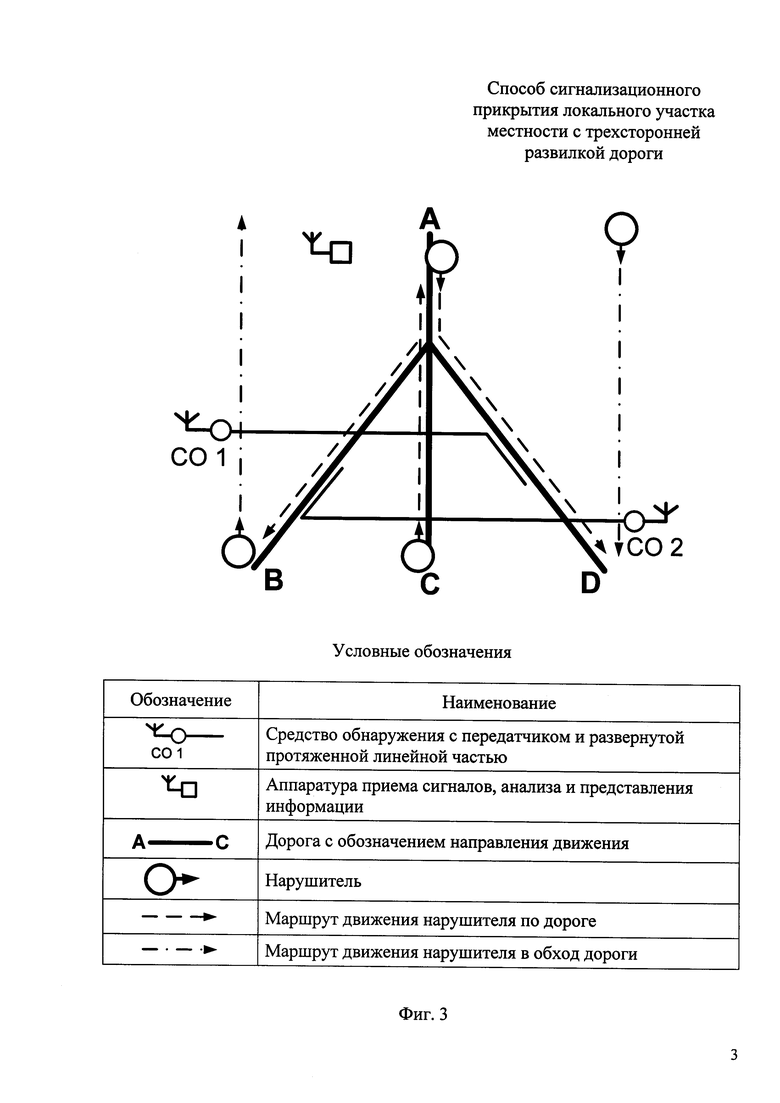
Для достижения поставленной цели разработан способ сигнализационного прикрытия локального участка местности с трехсторонней развилкой дороги, заключающийся в развертывании на развилке дороги и прилегающей к ней местности двух СО таким образом, чтобы ПЛЧ каждого СО участком длиной, равной трехкратной ширине зоны обнаружения (ЗО), лежала в непосредственной близости вдоль одной из дорог, покрывая ее своей ЗО; в развертывании ПЛЧ первого СО от места расхождения дорог на расстоянии, численно равном расстоянию, проходимому нарушителем с максимально допустимой скоростью для данной местности за время, требуемое сработавшему средству обнаружения для перехода в дежурный режим после выхода нарушителя из его ЗО; пересечении участком ПЛЧ первого СО, не лежащем вдоль дороги, центральной и одной из крайних дорог; развертывании ПЛЧ второго СО вдоль ПЛЧ первого СО на удалении, равном шестикратной ширине зоны обнаружения, и пересечении участком ПЛЧ второго СО, не лежащем вдоль дороги, центральной и другой крайней дорог; применении алгоритма, определяющего направление движения нарушителя по очередности поступления за установленный интервал времени одного, двух или четырех сигналов тревог и отношению между их длительностями (фиг. 3-5).
По сравнению с известным способом в предлагаемом способе в схеме развертывания ПЛЧ оба участка, лежащих вдоль дороги, имеют длину, равную трехкратной ширине ЗО, что существенно упрощает схему развертывания ПЛЧ СО (фиг. 2, 4). Однако уравнивание по длине участков ПЛЧ, лежащих вдоль дорог, обоих СО может привести к снижению информативности данных о направлениях движения нарушителя (например, направления АС и DB, СА и BD будут определяться попарно) [2]. Поэтому, чтобы не снижать информативность данных о направлении движения обнаруженного нарушителя в предлагаемом способе, ПЛЧ обоих СО разворачивается таким образом, чтобы они пересекали не одну дорогу, как в известном способе, а две. Это добавляет информативных признаков, указывающих на направление движения нарушителя. Так, при движении нарушителя через локальный участок местности с трехсторонней развилкой дороги от СО может поступить один, два или четыре сигнала тревоги, в известном способе количество поступающих сигналов тревог не более двух (фиг. 5).
При движении нарушителя в обход трехсторонней развилки дороги поступит только один сигнал тревоги от СO1 или СO2, в зависимости от того, с какой стороны от развилки (слева или справа) будет осуществляться ее обход (фиг. 3, 5).
При движении нарушителя через трехстороннюю развилку дороги в направлениях АВ, АС и AD поступят последовательно два сигнала тревоги: сначала от СO1, затем от СО2 (фиг. 5).
При движении нарушителя в направлениях ВА, СА и DA поступят последовательно два сигнала тревоги: сначала от СO2, затем от СO1 (фиг. 5).
При движении нарушителя в направлениях ВС, BD, СВ, CD, DB и DC поступят четыре сигнала тревоги: сначала один от СO2, затем два сигнала от СO1 и снова один сигнал тревоги от СO2 (фиг. 5).
Определение направления движения обнаруженного нарушителя происходит на основе сравнения очередности поступления от СO1 и СО2 одного, двух или четырех сигналов тревог и отношению между их длительностями. Различия в числе поступающих сигналов тревоги и последовательности сработавших СО были указаны выше. Различия же в длительности сигналов тревоги обусловлены тем, что ПЛЧ каждого СО две дороги пересекают поперек, а вдоль третьей дороги лежат участком длиной, равной трехкратной ширине ЗО (фиг. 4).
Пеший нарушитель движется со скоростью, пределы которой зависят от условий местности (фиг. 6). Пределы этих скоростей определены практически, известны и подтверждены на основе экспериментальных исследований [5, 6]. Верхний предел скорости нарушителя не превышает нижний более чем в полтора раза (фиг. 6):

где VMAX - максимальное значение скорости движения нарушителя, принимаемое для прикрываемого участка местности, м/с;
VMIN - минимальное значение скорости движения нарушителя, принимаемое для прикрываемого участка местности, м/с.
С учетом того, что максимально возможная скорость нарушителя на развилке дороги не превышает минимально возможную более чем в 1,5 раза, длина участка, лежащего вдоль дороги, выбирается как:

где ΔL - длина участков ПЛЧ, лежащих вдоль дороги, м;
Н - ширина зоны обнаружения СО, м.
При такой длине участка, лежащего вдоль дороги, даже при неравномерной скорости движения нарушителя длительность сигнала тревоги при его движении вдоль ПЛЧ будет всегда больше, чем при пересечении им же ПЛЧ, лежащей поперек дороги (фиг. 4, 5):

где tH - длительность поступившего сигнала тревоги при пересечении нарушителем ПЛЧ, лежащей поперек дороги, с;
tΔL _ длительность поступившего сигнала тревоги при движении нарушителя по участку дороги, вдоль которого лежит ПЛЧ СО, с.
Длительности сигналов тревог при пересечении нарушителем участков, одинаково сориентированных относительно дорог (лежащих поперек или вдоль нее), с учетом неравномерности скорости движения нарушителя не будут отличаться друг от друга более чем в 1,5 раза (фиг. 5).

где tH1 - длительность сигнала тревоги, поступившего от СO1, при пересечении нарушителем его ПЛЧ, лежащей поперек дороги, с;
tH2 - длительность сигнала тревоги, поступившего от СO2, при пересечении нарушителем его ПЛЧ, лежащей поперек дороги, с.

где tΔL1 - длительность сигнала тревоги, поступившего от СO1, при пересечении нарушителем ПЛЧ, лежащей вдоль дороги, с;
tΔL2 _ длительность сигнала тревоги, поступившего от СO2, при пересечении нарушителем ПЛЧ, лежащей вдоль дороги, с.
Поэтому, чтобы различать между собой направления АВ, AC, AD, учитывается, что при движении нарушителя в направлении АВ отношение длительности первого сигнала к длительности второго сигнала лежит в пределах 0,22-0,5; в направлении АС - отношение длительности первого сигнала к длительности второго сигнала лежит в пределах 0,67-1,5, в направлении AD - отношение длительности первого сигнала к длительности второго сигнала лежит в пределах 2,0-4,5 (фиг. 5). Таким же образом различаются между собой направления ВА, СА и DA (фиг. 5). При определении ВС, BD, СВ, CD, DB и DC учитывается дополнительно отношение длительности третьего сигнала к длительности четвертого (фиг. 5).
При движении нарушителя в направлениях ВС, BD, СВ, CD, DB и DC СO1 должно выдать сигнал тревоги дважды. Для исключения ошибки вывода о направлении движения важно обеспечить выполнение условия, при котором СO1 уже находилось в дежурном режиме до начала повторного пересечения нарушителем его ЗО. Т.е. время перехода СO1 в дежурный режим после выхода нарушителя из его ЗО должно быть меньше времени, затрачиваемого нарушителем на движение от одного до другого участка ПЛЧ СO1.

где tДР - время установления СO1 в дежурный режим после выхода нарушителя из зоны обнаружения, с;
tHAP - время, затрачиваемое нарушителем на движение от одного до другого участка ПЛЧ СO1, с.
Путь нарушителя от одного до другого участка ПЛЧ СO1 при движении его в направлениях ВС, BD, СВ, CD, DB и DC проходит через место расхождения дорог. Поэтому с учетом гарантированного выполнения условия (формула 6) удаление ПЛЧ СO1 от места развилки дороги может быть взятым равным (фиг. 4):

где VMAX - максимальное значение скорости движения нарушителя, принимаемое для прикрываемого участка местности м/с;
tДР - время установления СO1 в дежурный режим после выхода нарушителя из зоны обнаружения, с;
S1 - расстояние от места расхождения дорог до ПЛЧ СO1, м.
Расстояние между самими ПЛЧ СO1 и СO2 определяется исходя из выполнения условия гарантированного непересечения их ПЛЧ между собой, зависит от длины участка, лежащего вдоль дороги, и может быть взятым (фиг. 4):

где S2 - расстояние между ПЛЧ СO1 и ПЛЧ СO2, м.
С учетом того, что длина участка ПЛЧ, лежащего вдоль дороги, равна трехкратной ширине ЗО (формула 2):

Для исключения ошибки, связанной с совпадением начала у последовательности из четырех сигналов со всей последовательностью из одного и двух сигналов, вывод о направлении движения нарушителя, при поступлении одного (направления движения в обход) и двух сигналов тревог (направления движения АВ, AC, AD, В А, СА, DA) делается не ранее наступления максимального времени накопления поступающих сигналов (фиг. 5):

где Δt - время накопления поступающих сигналов, с;
Т - максимальное время накопления поступающих сигналов, с.
Этот интервал определяется максимально возможным временем, за которое нарушитель пройдет направлении BD (DB) с минимальной скоростью, принимаемой для прикрываемого участка местности. Для простоты расчетов принимается, что все расстояния по дорогам от места разветвления дорог до ПЛЧ СO1 и СO2 равны, тогда расстояние, проходимое нарушителем в направлении BD (DB) с пересечением ПЛЧ четыре раза и учетом формул 7 и 9 будет равно:

где S - расстояние, проходимое нарушителем при пересечением ПЛЧ четыре раза, м.
С учетом гарантированного исключения ошибки при определении направления движения:

где VMIN - минимальное значение скорости движения нарушителя, принимаемое для прикрываемого участка местности, м/с.
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
1. Развертывание средства 1 и 4 обнаружения с передатчиком с учетом рекомендуемых геометрических параметров ΔL, S1, S2 (фиг. 4).
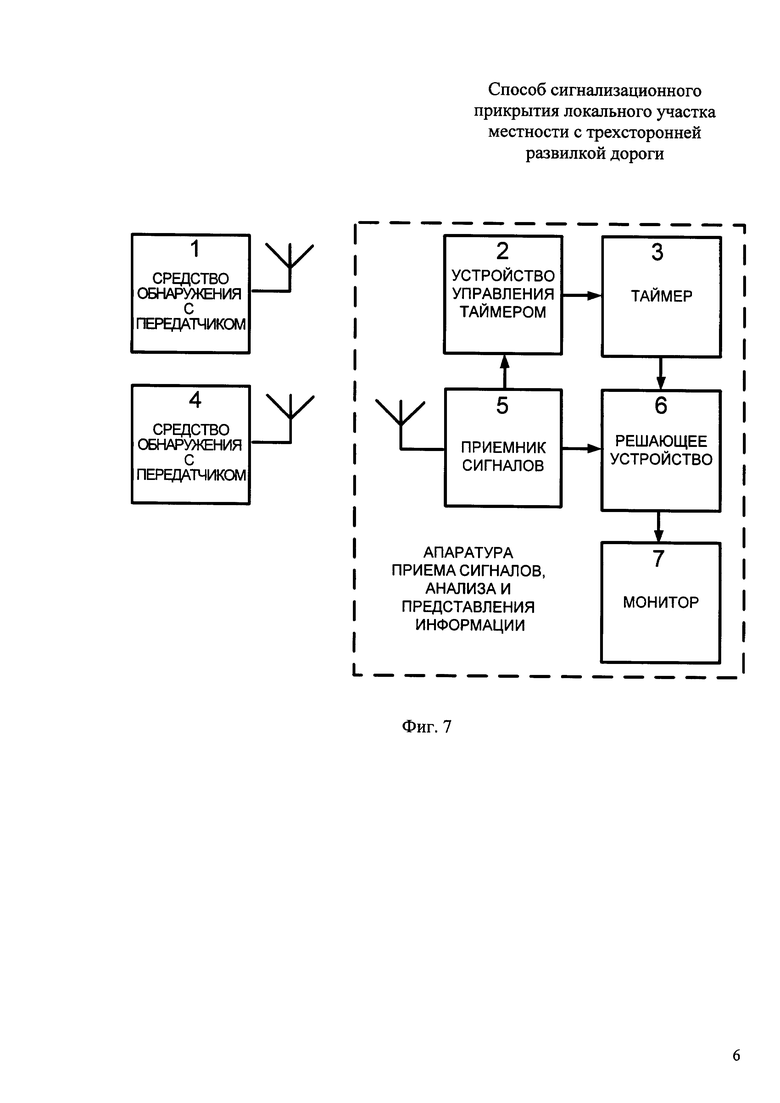
2. Развертывание на местности аппаратуры приема, анализа и представления информации, включающей в себя приемник 5 сигналов, устройство 2 управления таймером, таймер 3, решающее устройство 6 и монитор 7 (фиг. 7).
3. Определение максимального времени накопления поступающих сигналов Т (формула 12).
4. Составление таблицы принятия решения (алгоритма вывода) о направлении движения нарушителя на трехсторонней развилке дороги и загрузку ее (его) в решающее устройство 6 (фиг. 5).
5. Начало работы средства 1 и 4 обнаружения с передатчиком в дежурном режиме.
Основной этап начинается при движении нарушителя через трехстороннюю развилку дороги или в обход ее и попадании его в зону обнаружения СО, он включает:
1. Регистрацию приемником 5 первого сигнала тревоги от одного из средств 1 или 4 обнаружения с передатчиком при появлении нарушителя в его зоне обнаружения, запуск таймера 3 устройством 2 управления таймером, начало отсчета им длительности сигнала тревоги, времени накопления поступающих сигналов Δt и записью номера сработавшего средства обнаружения в решающее устройство 6 (фиг. 7).
2. Запись в решающее устройство 6 значения длительности первого сигнала тревоги после его окончания. Регистрацию приемником 5 возможного второго (третьего, четвертого) сигнала тревоги и определение их длительности таймером 3. Остановку работы таймера 3 в случае достижения времени накопления сигналов (Δt) значения максимального времени накопления поступающих сигналов (Т) или раньше, в случае окончания поступления четвертого сигнала тревоги. Сравнение решающим устройством 6 числа очередности поступления за установленный интервал времени одного, двух или четырех сигналов тревог, отношения между их длительностями с имеющимися в таблице принятий решения (алгоритмом вывода) о направлении движения нарушителя (фиг. 5).
3. Формирование вывода о месте нарушения решающим устройством 6.
4. Обнуление таймера 3 устройством 2 управления таймером. Выведение результата о месте нарушения на монитор 7 (фиг. 7).
Сущность изобретения поясняется графическими материалами, где представлены:
- фиг. 1 - схема развертывания ПЛЧ СО на четырехстороннем перекрестке дорог в известном способе и примерами направлений движения нарушителя;
- фиг. 2 - схема развертывания ПЛЧ СО на трехсторонней развилке дороги известным способом;
- фиг. 3 - схема развертывания ПЛЧ СО в предлагаемом способе и примерами направлений движения нарушителя;
- фиг. 4 - схема развертывания ПЛЧ СО в предлагаемом способе с указанием размеров;
- фиг. 5 - таблица принятия решения (алгоритм вывода) о направлении движения нарушителя на трехсторонней развилке дорог;
- фиг. 6 - сводная таблица возможных скоростей движения нарушителя через различные участки местности;
- фиг. 7 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат состоит в упрощении схемы развертывания ПЛЧ СО и получении возможности применять СО, которые по своим тактико-техническим характеристикам имеют ширину ЗО до 10 метров и длину ПЛЧ до 250 метров.
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
2. Пат. 2554530 Российская Федерация, МПК 51 G08В 13/00, G08В 13/24. Способ обнаружения нарушителя и определение направления его движения на перекрестке дорог и путях его обхода / С.А. Удот., Федоровцев Д.Г. - №2014109735/08; заявл. 13.03.14; опубл. 27.06.15, Бюл. №18.
3. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПП ФСБ РФ, 2004. - 135 с.
4. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
5. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
6. Баленко С. В. Школа выживания. - М.: 1994. - 140 с.



Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной линейной частью (ПЛЧ) в виде гибкого кабеля, построенных на проводно-волновом или сейсмическом принципах обнаружения, для сигнализационного прикрытия трехсторонней развилки дороги и путей их обхода. Способ заключается в развертывании на развилке дороги и прилегающей к ней местности двух СО таким образом, чтобы ПЛЧ каждого СО участком длиной, равной трехкратной ширине зоны обнаружения (ЗО), лежала в непосредственной близости вдоль одной из дорог, покрывая ее своей ЗО; в развертывании ПЛЧ первого СО от места расхождения дорог на удалении, численно равном расстоянию, проходимому нарушителем с максимально допустимой скоростью для данной местности за время, требуемое сработавшему средству обнаружения для перехода в дежурный режим после выхода нарушителя из его ЗО; пересечении участком ПЛЧ первого СО, не лежащим вдоль дороги, центральной и одной из крайних дорог; развертывании ПЛЧ второго СО вдоль ПЛЧ первого СО на удалении, равном шестикратной ширине ЗО, и пересечении участком ПЛЧ второго СО, не лежащим вдоль дороги, центральной и другой крайней дорог; применении алгоритма, определяющего направление движения нарушителя по очередности поступления за установленный интервал времени одного, двух или четырех сигналов тревог и отношению между их длительностями. Способ включает подготовительный этап с развертыванием по разработанной схеме ПЛЧ двух СО на местности и основной этап, который начинается с момента попадания нарушителя в ЗО одного из СО, в течение которого он обнаруживается и определяется направление его движения. Технический результат состоит в упрощении схемы развертывания ПЛЧ СО и получении возможности применять СО, которые по своим тактико-техническим характеристикам имеют ширину ЗО до 10 метров и длину ПЛЧ до 250 метров. 7 ил.
Способ сигнализационного прикрытия трехсторонней развилки дороги и путей ее обхода, заключающийся в развертывании на трехсторонней развилке дороги и прилегающей к ней местности двух средств обнаружения с протяженной линейной частью таким образом, чтобы протяженная линейная часть каждого средства обнаружения участком определенной длины лежала в непосредственной близости вдоль одной из дорог, покрывая ее своей зоной обнаружения, применении алгоритма, определяющего направление движения нарушителя по числу, очередности поступления и отношению между длительностями сигналов тревоги, отличающийся тем, что протяженная линейная часть первого средства обнаружения развертывается от места расхождения дорог на расстоянии, численно равном расстоянию, проходимому нарушителем с максимально допустимой скоростью для данной местности за время, требуемое сработавшему средству обнаружения для перехода в дежурный режим после выхода нарушителя из его ЗО; и участком, не лежащим вдоль дороги, пересекает центральную и одну крайнюю дороги; протяженная линейная часть второго средства обнаружения развертывается вдоль протяженной линейной части первого средства на удалении от нее, равном шестикратному значению ширины зоны обнаружения; участком, не лежащим вдоль дороги, пересекает центральную и другую крайнюю дороги; соотношение ширины зоны обнаружения обоих средств обнаружения и длин участков, лежащих вдоль дорог, 1:3; в алгоритме, определяющем направление движения нарушителя, анализируется один, два или четыре сигнала тревоги, поступившие за установленный интервал времени.
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2013 |
|
RU2540841C1 |
| US 0004458240 A1, 03.07.1984;US 0005559496 A1, 24.09.1996. | |||

