Изобретение относится к системам электронного торможения, в частности с управлением со стороны тягачей, имеющих средства системы электронного торможения, стандартными прицепами, Т.е. такими, которые сами не оборудованы своими собственными системами электронного управления торможением.
Цель изобретения - повышение эффективности торможения.
На фиг.1 представлена схема одного воплощения системы торможения средства передвижения; на фиг.2 - схема одного воплощения базовой петли управления давлением, используемой в системе на фиг. 1; на фиг.З - схема одного воплощения базовой адаптирующей петли управления торможением, используемой в системе по фиг.1; на фиг.4 - схема одного воплощения устройства управления торможением прицепа, используемого в системе по фиг.1; на фиг.5 структурная схема, показывающая две адаптирующие петли управления, используемы в настоящей системе; на фиг.6 - таблица, показывающая возможные комбинации погрешностей торможения и действия, осуществляемые системой для получения корректировки; на фиг.7 - более подробно одно возможное воплощение двух адаптирующих петель управления фиг.5; на фиг.8 - более подробно второе возможное воплощение даух адаптирующих петель управления фиг.5; на фиг.9 - схема масс-детектора прицепа, используемого в системе; на фиг. 10- таблица, показывающая организацию массива констант адаптации.
Фиг.1 показывает основные компоненты обычной системы электронного торможения, которая здесь подробно не описывается. Сигналы требования торможения водителя генерируют электрически
00
о о
00
00
GO
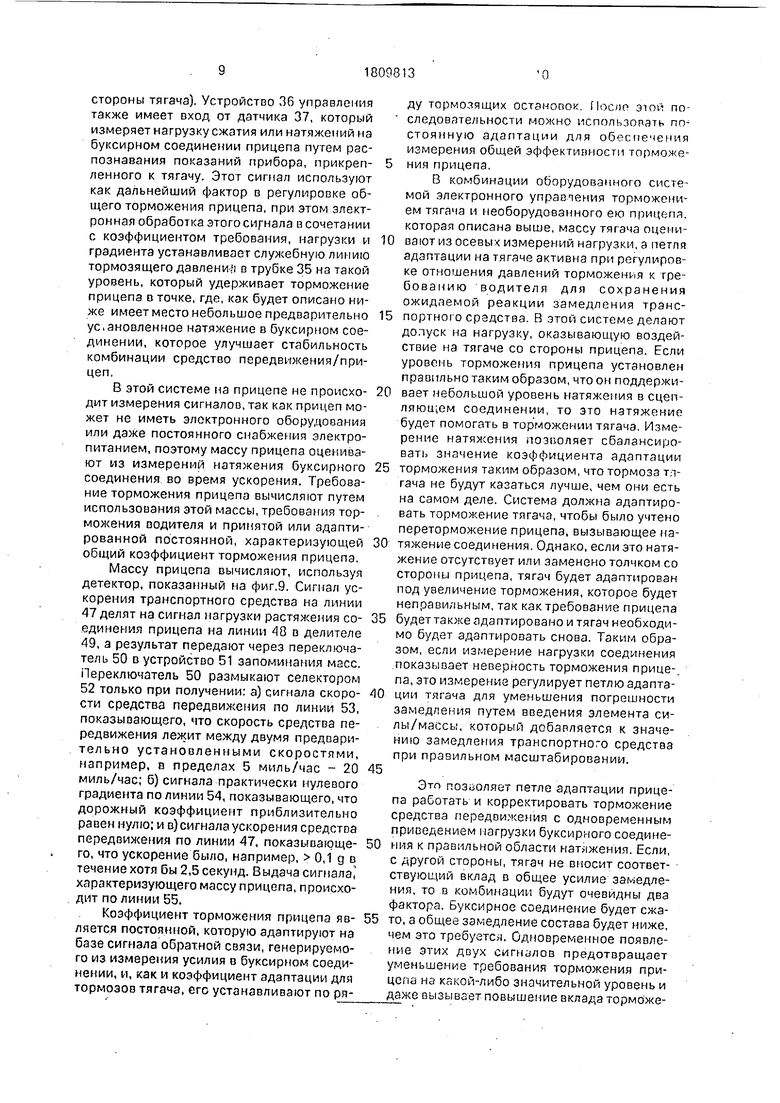
устройством работающего от педали преобразователя 1 и подают на электронное устройство 2 управления, где происходит формирование сигналов давлений переднего и заднего тормозов и подача их на приводы 3, 4 переднего и заднего тормозов через соответствующие переключающие клапаны 5, 6. Давления торможения зависят от рабочих параметров средства передвижения, определяемых датчиками 7, 8 передней и задней нагрузки, измерителем 9 замедления средства передвижения и датчиком 10 скорости,
В системе адаптирующего торможения преобразователь 1 ножной педали генерирует первый сигнал, указывающий уровень торможения, необходимый водителю, а дополнительные датчики измеряют осевые нагрузки средства передвижения (датчики 22, 24 на фиг.1) и рабочий градиент. Система проводит соответствующие коррекции открытой петли для требований тормозящего давления1, преобразуемых от входной педали водителя, с целью восстановления замедления средства передвижения, подлежащего фиксации пропорционально требованию водителя.
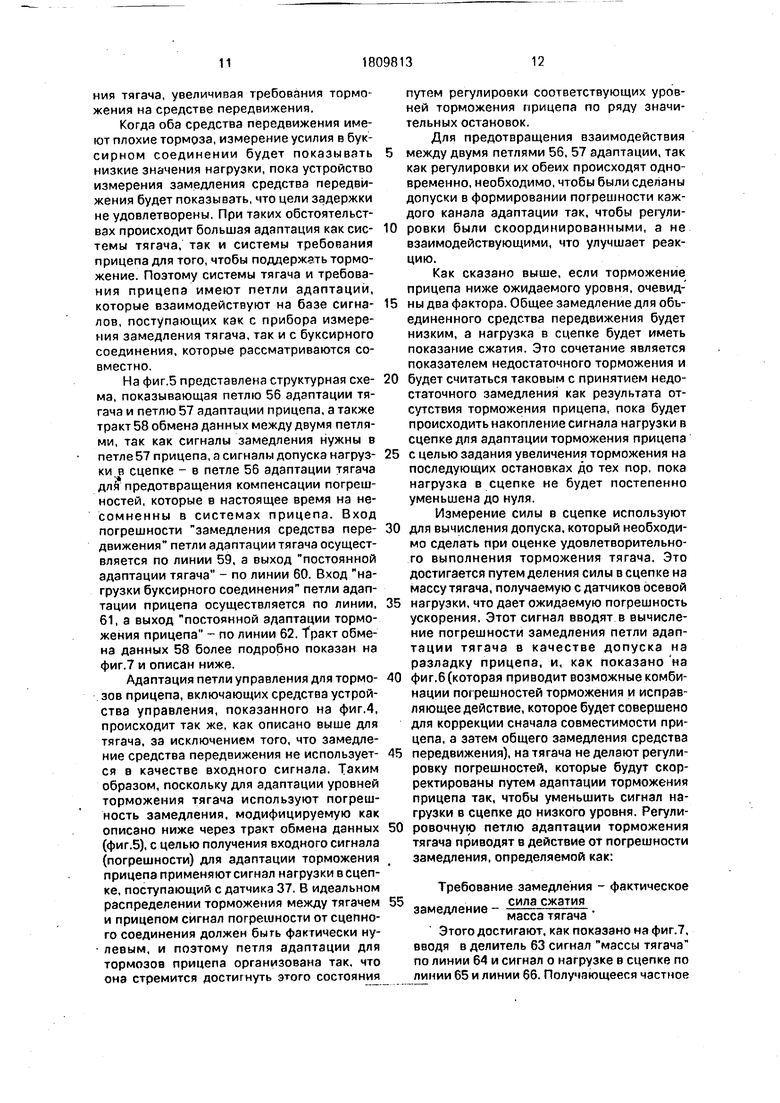
Обратившись теперь к фиг.2 можно увидеть показанную на ней известную систему, применяющую петлю 11 управления давлением, которая принимает сигнал D через элемент 12 выбора наивысшего значения от дуплексного педального преобразователя 1 торможения, используемого для получения сигнала погрешности давления Е путем сравнения в устройстве 13 сложения (вычитания с выходным сигналом преобразователя давления Р; эта погрешность давления Е образует входной сигнал для устройства 14 управления давлением, которое генерирует выходной сигнал, вызывающий изменение давления, вырабатываемого электропневматическим или злектрогидравлимеским преобразователем 15, так: чтобы уменьшить амплитуду погрешности давления Е. Пневматическая или гидравлическая среда давления хранится в резервуаре 16.
Природа и схема данного устройства 14 управления давлением зависят от типа применяемого преобразователя 15. Хорошо известны два принципа такого преобразователя, а именно: аналоговая система, в которой используют клапан, давление на выходе которого вырабатывают пропорционально току соленоида, и цифровая систе-,. ма, показанная на фиг.2, в которой используют пару более простых соленоидных клапанов 17, 18 для повышения или понижения давления в управляющей камере путем селективного возбуждения, В качестве пневматического преобразователя применяется переключающий клапан 19, который отвечает на это давление в управляющей камере и который ребалансируется
в замкнутое состояние, когда давления торможения на тормозных приводах 3, 4 средства передвижения становятся равными этому управляющему давлению. Такой клапан 19 имеет преимущество в том, что уп0 равляющее давление камеры быстро отвечает на открывание клапана, обеспечивая петлю быстрого управления, которая является точной и чуткой.
Адаптация осуществления торможения
5 имеет место после каждой значительной ос- .тановки (приемлемого уровня замедления). Достигнутое замедление сравнивают в адаптирующей петле с уровнем замедления, задаваемым по требованию водителя
0 через ножную педаль. Как схематично показано на фиг.З, прилегаемых к настоящему описанию чертежей, получающуюся погрешность замедления FE, вычисленную из разности, интегрируют по всей остановке. В
5 конце остановки происходит формирование средней погрешности, и цифру для этой средней погрешности затем интегрируют в постоянную адаптации, которую постепенно строят по ряду остановок. Из-за очень
0 значительной нелинейности, которая связывает вращающий момент торможения с давлением привода на различных скоростях, и так как эти взаимосвязи обычно неизвестны, одной постоянной адаптации обычно
5 недостаточно. В случаях, когда соотношения торможения значительно нелинейны, одиночную постоянную адаптации можно расширить до массива постоянных адаптации на основе скорости и замедления. Так
0 как регулировку тормозов производят посредством управляющей системы, которая широко используется в компьютерном программном обеспечении; одиночную постоянную адаптации можно легко заменить
5 массивом постоянных, разбитых скоростью средства передвижения, когда происходит первоначальный вызов торможения, и требуемым замедлением, задаваемым давлением водителя на тормозную педаль.
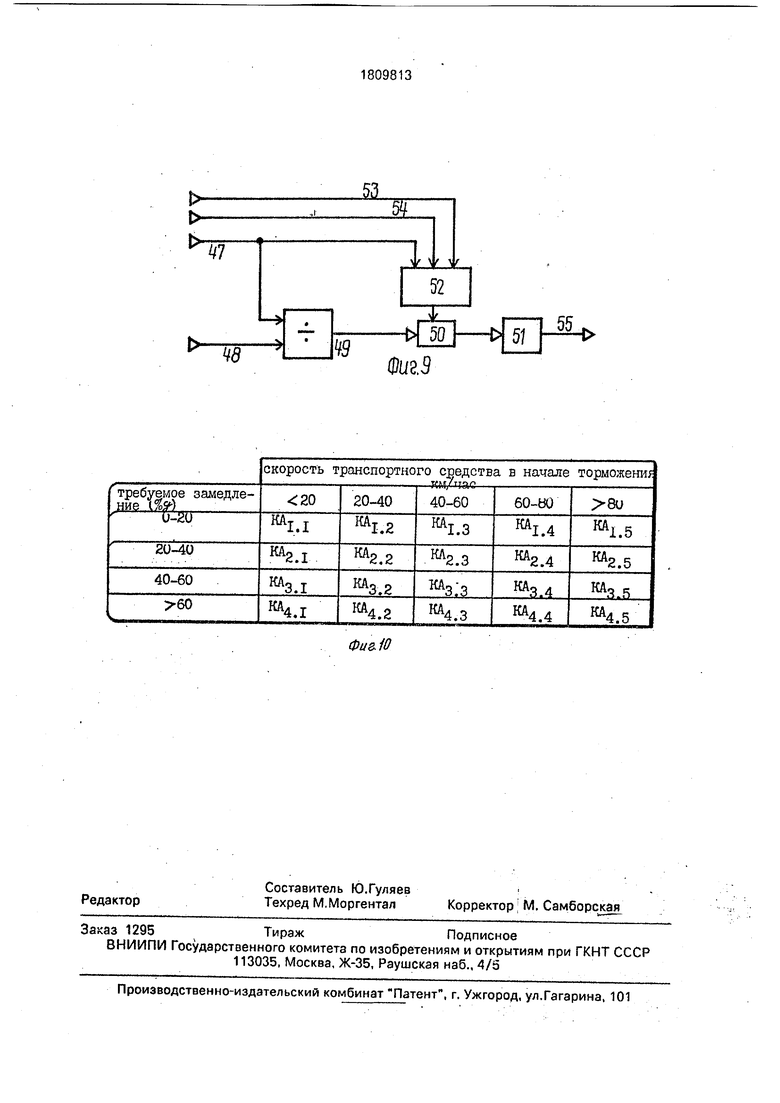
0 Типово мэссив постоянных можно создать в зависимости от скорости средства передвижения и требования замедления, что показано на примере фиг.10.
Постоянную адаптации (или массив по5 стоянных уменьшают до подходящей части интегрированного значения или интегрированных значений и подают на системный умножитель масштаба, где происходит модификация соотношения между компенсированным требованием водителя и
соответствующим требованием тормозящего давления тягача.
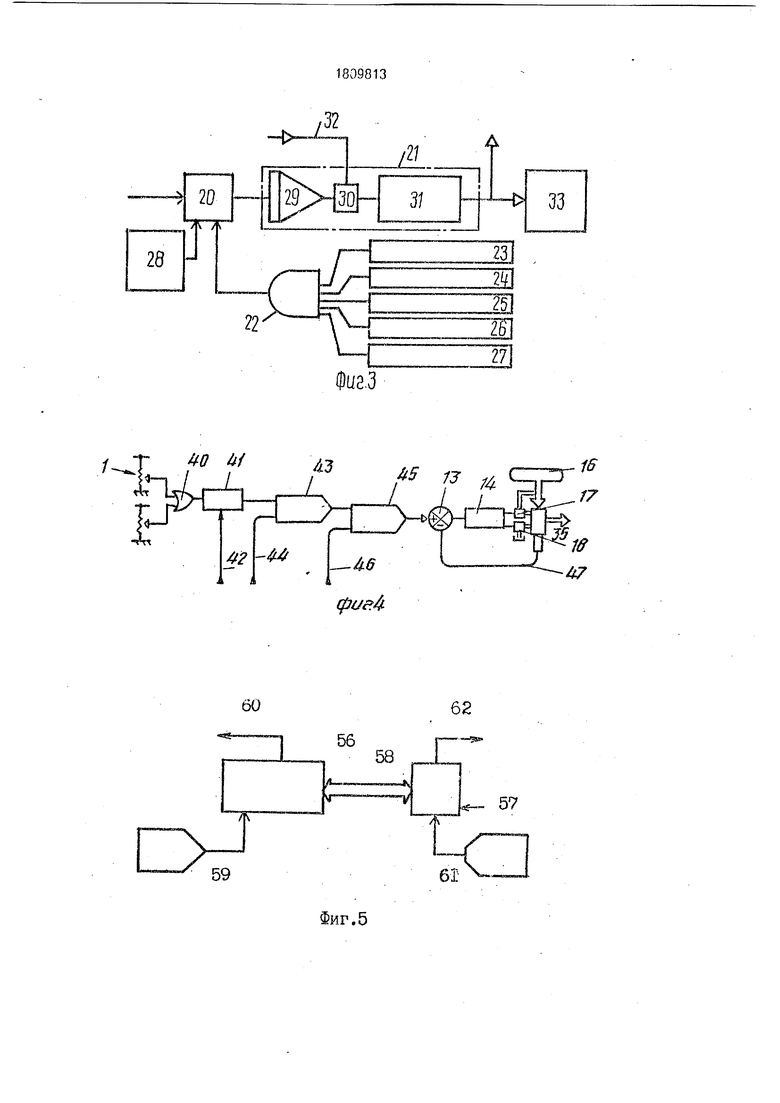
Управляемый переключатель 20 (фиг.З) адаптирован таким образом, что позволяет пропускать погрешность замедления FE на средство 21 вычисления долгосрочной постоянной адаптации, только когда управляющий сигнал S, поступающий с вентиля 22, показывает получение сигналов с датчика 2 реагирующего на требование, превосходя- щее первый заранее определенный уровень, датчика 24, реагирующего на градиент, находящийся в нулевом диапазоне, датчика 25, реагирующего на скорость, превосходящую первый заранее опреде- ленный порог, датчика 26, реагирующего на требование, меньшее, чем второй заранее определенный уровень, и датчика 27, реагирующего на скорость средства передвижения, меньшую, чем второй заранее определенный порог. В отсутствие сигналов переключатель 20 запрещает прохождение погрешности замедления FE на средство 21 Переключатель 20 также блокирует погрешность замедления при пол- учении сигнала от средства 28 обнаружения антиблокировки.
Средство 21 выработки долгосрочной постоянной адаптации включает в себя очень медленно действующий интегратор 29, выход которого соединен через переключатель 30 со. стробирующим усредняющим средством 31, причем переключателем 30 управляет окончание импульса торможения, вырабатываемого на линии 32 в конце каждого торможения средства передвижения. Однако следует отметить, что блок- схемы, показывающие долгосрочные постоянные адаптации, получаемые из погрешности замедления, являются попыткой иллюстрации простыми путями того, что на практике достижимо при помощи программного обеспечения.
К примеру, интегратор 29 можно имитировать цифровым компьютером, используя накапливающую ячейку в памяти, получающую дополнения обработанных погрешностей замедления через заранее заданные интервалы времени. Интегратор можно установить в исходное состояние в любой мо- мент времени и задать в нем начальную точку - единицу или масштабное значение, представляющее единицу. Интегральную коррекцию, выработанную в конце любой остановки (или в точке низкой скорости, при которой коррекционныо изменения прекращаются), можно определить путем вычисления разницы между конечным показанием интегратора и хранимым начальным значением интегратора.
Таким образом в конце каждого гормо- жения ячейку интегрирования можно установить в исходное состояние на значение хранимой начальной интегрирующей величины. Ей может быть заранее установленное базовое значение или альтернативно-прогрессивное значение, образованное из предыдущего стартового интегрирующего уровня плюс процент интегральной коррекции, выработанный за время торможения. Если это имеет место, то хранимое начальное значение интегратора изменяется после каждой остановки, а управление, следовательно, адаптируется под условия торможения.
Происходит накопление получаемых таким образом значений на каждом торможении /, его обработка в очень медленно действующем интеграторе 29 для генерации постоянной адаптирования С, оцениваемой по значительному числу торможений средства передвижения. Эта постоянная адаптации имеет номинальную или начальную величину единицы, и она постоянно претер- певаетмодификациюдля коррекции меняющихся условий торможения между остановками. Поэтому эта постоянная является хорошим показателем состояния торможения, и ее регулярно модифицируют в устройстве управления и сохраняют в электрически программируемой энергонезависимой памяти компьютера для выработки при запуске или по требованию через диагностический выходной канал 33 коэффициента действия торможения.
Когда средство передвижения, обору- дованное такой системой электронного управления торможением, приспособлено для буксировки стандартного прицепа, то есть . такого, который не снабжен своей собственной системой электрон кого управления торможением, то требование торможения, передаваемое прицепу, выдается в форме сигнала пневматического давлэния, который обычно предоставляет система электронного управления торможением, находящаяся на тягаче. Для этой цели в дополнение к вышеупомянутым базовым компонентам настоящая система также включает подсистему, состоящую из отдельного переключающего клапана 34 (фиг. 1), которая обеспечивает подачу пневматического сигнала на тормоза прицепа (не показаны) через служебную трубу 35 прицепа для подачи воздуха под управлением устройства 36 управления тормозами прицепа. Требуемое давление торможения прицепа можно регулировать так, чтобы оно соответствовало нагрузке прицепа, оцениваемой на буксире пугзм обработки сигнала, поступающего с датчика нагрузки, и чтобы оно
компенсировало рабочий градиент, измеряемый системой электронного управления торможением. Датчик 37 нагрузки расположен в сцепляющем соединении (не показано) между буксиром и прицепом. В дополнение к торможению прицепа, имеющему место при ножном сигнале со стороны водителя или в одной из цепей торможения тягача, если их больше одной, также произойдет генерация пневматического сигнала торможения прицепа при остановочном торможении тягача.
Таким образом, цепь торможения транспортного средства с системой электронного торможения, имеющей осевое управление, которая показана на фиг.1, расширена до пневматической цепи и до системы электронного управления с целью обеспечения подходящим управляющим каналом торможения прицепа, совместимым с используемыми в настоящее время системами прицепов. Общеизвестная система электронного торможения грузовика, например, является разделенной системой, относящейся как к пневматическим цепям, к средствам электронного управления для удовлетворения существующих стандартов безопасности. Преобразователи педали торможения, устройство управления и блоки электропитания являются дуплексными, а пневматические цепи - отдельными и индивидуальными для каждой оси. Эти принципы соблюдаются, когда добавляется подсистема питания прицепа, в том, что работу управляющего клапана 34 питания прицепа обеспечивают через трубопровод 38 из собственного резервуара снабжения прицепа (не показан), причем этот клапан 34 имеет либо интегрированный, либо отдельный управляющий элемент, который принимает инверсный сигнал воздушного остановочного торможения через линию 39 для преобразования его в сигнал торможения прицепа в трубке 35. Эту систему управления торможением прицепа снабжают сигналами, направляемыми от каждого из двух (дуплексных) преобразователей тормозной педали, параллельно со снабжением каждого осевого управляющего канала, а всю тормозную цепь снабжают батарейным питанием как от основной, так и от вспомогательной батареи, чтобы эта подсистема поддерживала рабочее управление прицепом в случае отказа любой осевой системы.
Основная система торможения, подсистема для тормозов прицепа также подвержена адаптирующей компенсации. Так, в устройстве 36 управления каналом прицепа, которое устанавливает давление торможения прицепа в трубке 35 от требования торможения водителя, выборочно компенсируют несущую нагрузку прицепа и рабочий градиент комбинации средство
передвижения/прицеп (как это устанавливается на тягаче).
Более подробно устройство 36 управления каналом прицепа проиллюстрировано на фиг,4. Входное действие водителя на дуп0 лексный педальный преобразователь 1 формирует сигнал требования водителя D при помощи вентиля ИЛИ 40. Сначала в сигнале требования D компенсируют рабочий гради-, ент на элементе 41 компенсации градиента,
5 который получает входной сигнал от системы тягача по линии 42, характеризующей превалирующий дорожный градиент. Затем компенсированный сигнал требования модифицируют под массу прицепа, которую
0 либо измеряют (см. фиг.9, которая будет описана ниже), либо полагают полной нагрузкой. Предположение полной нагрузки должно относиться к прицепу, уже оборудованному пневматическим клапаном, восп5 ринимающим нагрузку. В последнем случае воздушный сигнал значения полной нагрузки будет послан прицепу, которым будет (будут) управлять установленный (установленные) клапан (клапаны) пропорциональ0 ного распределения. Модификация с учетом массы прицепа достигается в умножителе 43 нагрузки, который на одном входе по линии 44 получает сигнал, характеризующий массу прицепа или принятое значение
5 полной нагрузки. Сигнал требования с градиентной компенсацией и умножением нагрузки затем поступает на масштабный умножитель 45, функцией которого является представление по линии 46 либо пере0 менной КА адаптации прицепа, либо массива таких переменных на основе сцепляющей нагрузки, но с использованием тех же принципов, что и для адаптирующего массива, описанного ниже со ссылкой на
5 фиг.10. Затем на масштабный сигнал воздействует сигнал давления обратной связи PF по линии 47, в результате получается рабочий сигнал для устройства 14 управления давлением (см. фиг.2). Выход петли 11
0 управления давлением, управляемой устройством 14, вырабатывает сигнал для тормозов прицепа в трубке 35.
Таким образом устройство 36 управления каналом прицепа устанавливает тор5 мозное давление прицепа в трубке 35 по требованию торможению водителя, компенсируемое рабочим градиентом и выборочно несущей нагрузкой прицепа и рабочим гра- диентом комбинации средство передвижения/прицеп (как это распознается со
стороны тягача). Устройство 36 управления также имеет вход от датчика 37, который измеряет нагрузку сжатия или натяжений на буксирном соединении прицепа путем распознавания показаний прибора, прикрепленного к тягачу. Этот сигнал используют как дальнейший фактор в регулировке общего торможения прицепа, при этом электронная обработка этого сигнала в сочетании с коэффициентом требования, нагрузки и градиента устанавливает служебную линию тормозящего давлени в трубке 35 на такой уровень, который удерживает торможение прицепа о точке, где, как будет описано ниже имеет место небольшое предварительно установленное натяжение в буксирном соединении, которое улучшает стабильность комбинации средство передвижения/прицеп.
В этой системе на прицепе не происходит измерения сигналов, так как прицеп может не иметь электронного оборудования или даже постоянного снабжения электропитанием, поэтому массу прицепа оценивают из измерений натяжения буксирного соединения во время ускорения. Требование торможения прицепа вычисляют путем использования этой массы, требования торможения водителя и принятой или адаптированной постоянной, характеризующей общий коэффициент торможения прицепа.
Массу прицепа вычисляют, используя детектор, показанный на фиг,9. Сигнал ускорения транспортного средства на линии 47 делят на сигнал нагрузки растяжения соединения прицепа на линии 48 в делителе 49, а результат передают через переключатель 50 в устройство 51 запоминания масс. Переключатель 50 размыкают селектором 52 только при получении: а) сигнала скорости средства передвижения по линии 53, показывающего, что скорость средства передвижения лежит между двумя предвари- тельно установленными скоростями, например, в пределах 5 миль/час - 20 миль/час; б) сигнала практически нулевого градиента по линии 54, показывающего, что дорожный коэффициент приблизительно равен нулю; и в) сигнала ускорения средства передвижения по линии 47, показывающего, что ускорение было, например, 0,1 у в течение хотя бы 2,5 секунд. Выдача сигнала, характеризующего массу прицепа, происходит по линии 55.
Коэффициент торможения прицепа является постоянной, которую адаптируют на базе сигнала обратной связи, генерируемого из измерения усилия в буксирном соединении, и, как и коэффициент адаптации для тормозов тягача, его устанавливают по ряду тормозящих остановок. Поело этой по- следовательности можно использовать постоянную адаптации для обеспечения измерения общей.эффективности торможе- 5 ния прицепа.
В комбинации оборудованного системой электронного управления торможением тягача и необорудованного ею прицепа, которая описана выше, массу тягача оцени0 ваютиз осевых измерений нагрузки, а петля адаптации на тягаче активна при регулировке отношения давлений торможения к требованию водителя для сохранения ожидаемой реакции замедления транс5 портного средства. В этой системе делают допуск на нагрузку, оказывающую воздействие на тягаче со стороны прицепа. Бели уровень торможения прицепа установлен правильно таким образом, что он поддержи0 вает небольшой уровень натяжения в сцепляющем соединении, то это натяжение будет помогать в торможении тягача. Измерение натяжения позволяет сбалансировать значение коэффициента адаптации
5 торможения таким образом, что тормоза тягача не будут казаться лучше, чем они есть на самом деле. Система должна адаптировать торможение тягача, чтобы было учтено переторможение прицепа, вызывающее на0 тяжение соединения. Однако, если это натяжение отсутствует или заменено толчком со стороны прицепа, тягач будет адаптирован под увеличение торможения, которое будет неправильным, так как требование прицепа
5 будеттакже адаптировано и тягач необходимо будет адаптировать снова. Таким образом, если измерение нагрузки соединения .показывает неверность торможения прице-. па, это измерение регулирует петлю адапта0 ции тягача для уменьшения погрешности замедления путем введения элемента силы/массы, который добавляется к значению замедления транспортного средства при правильном масштабировании.
5
Этп позволяет петле адаптации прицепа работать и корректировать торможение средства передвижения с одновременным приведением нагрузки буксирного соедине0 ния к правильной области натяжения. Если, с другой стороны, тягач не вносит соответ- ствующий вклад в общее усилие замедления, то в комбинации будут очевидны два фактора. Буксирное соединение будет сжа5 то, а общее замедление состава будет ниже, чем это требуется. Одновременное появление этих двух сигналов предотвращает уменьшение требования торможения прицепа на какой-либо значительной уровень и даже вызывает повышение вклада торможения тягача, увеличивая требования торможения на средстве передвижения.
Когда оба средства передвижения имеют плохие тормоза, измерение усилия в буксирном соединении будет показывать низкие значения нагрузки, пока устройство измерения замедления средства передвижения будет показывать, что цели задержки не удовлетворены. При таких обстоятельствах происходит большая адаптация как системы тягача, так и системы требования прицепа для того, чтобы поддержать торможение. Поэтому системы тягача и требования прицепа имеют петли адаптации, которые взаимодействуют на базе сигналов, поступающих как с прибора измерения замедления тягача, так и с буксирного соединения, которые рассматриваются совместно.
На фиг.5 представлена структурная схема, показывающая петлю 56 адаптации тягача и петлю 57 адаптации прицепа, а также тракт 58 обмена данных между двумя петлями, так как сигналы замедления нужны в петле 57 прицепа, а сигналы допуска нагрузки в сцепке - в петле 56 адаптации тягача длЈ предотвращения компенсации погрешностей, которые в настоящее время на несомненны в системах прицепа. Вход погрешности замедления средства передвижения петли адаптации тягача осуществляется по линии 59, а выход постоянной адаптации тягача - по линии 60. Вход нагрузки буксирного соединения петли адаптации прицепа осуществляется по линии, 61, а выход постоянной адаптации торможения прицепа - по линии 62. Тракт обмена данных 58 более подробно показан на фиг.7 и описан ниже.
Адаптация петли управления для тормозов прицепа, включающих средства устройства управления, показанного на фиг.4, происходит так же, как описано выше для тягача, за исключением того, что замедление средства передвижения не используется в качестве входного сигнала. Таким образом, поскольку для адаптации уровней торможения тягача используют погрешность замедления, модифицируемую как описано ниже через тракт обмена данных (фиг.5), с целью получения входного сигнала (погрешности) для адаптации торможения прицепа применяют сигнал нагрузки в сцепке, поступающий с датчика 37, В идеальном распределении торможения между тягачем и прицепом сигнал погрешности от сцепного соединения должен быгь фактически ну- - левым, и поэтому петля адаптации для тормозов прицепа организована так. что она стремится достигнуть этого состояния
путем регулировки соответствующих уровней торможения прицепа по ряду значительных остановок.
Для предотвращения взаимодействия
между двумя петлями 56, 57 адаптации, так как регулировки их обеих происходят одновременно, необходимо, чтобы были сделаны допуски в формировании погрешности каждого канала адаптации так, чтобы регулировки были скоординированными, а не взаимодействующими, что улучшает реакцию.
Как сказано выше, если торможение прицепа ниже ожидаемого уровня, очевидны два фактора. Общее замедление для объединенного средства передвижения будет низким, а нагрузка в сцепке будет иметь показание сжатия. Это сочетание является показателем недостаточного торможения и
будет считаться таковым с принятием недостаточного замедления как результата отсутствия торможения прицепа, пока будет происходить накопление сигнала нагрузки в сцепке для адаптации торможения прицепа
с целью задания увеличения торможения на последующих остановках до тех пор. пока нагрузка в сцепке не будет постепенно уменьшена до нуля.
Измерение силы в сцепке используют
для вычисления допуска, который необходимо сделать при оценке удовлетворительного выполнения торможения тягача. Это достигается путем деления силы в сцепке на массу тягача, получаемую с датчиков осевой
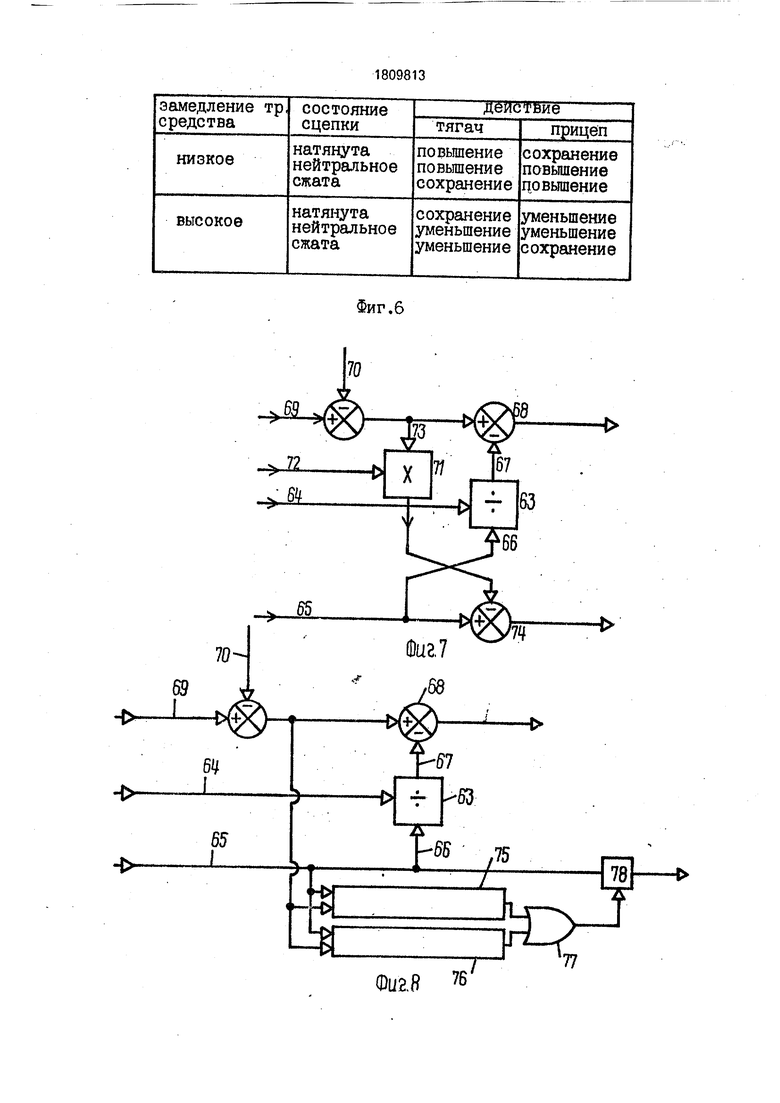
нагрузки, что дает ожидаемую погрешность ускорения. Этот сигнал вводят в вычисление погрешности замедления петли адаптации тягача в качестве допуска на разладку прицепа, и, как показано на
фиг.6 (которая приводит возможные комбинации погрешностей торможения и исправляющее действие, которое будет совершено для коррекции сначала совместимости прицепа, а затем общего замедления средства
передвижения), на тягача не делают регулировку погрешностей, которые будут скорректированы путем адаптации торможения прицепа так, чтобы уменьшить сигнал нагрузки в сцепке до низкого уровня. Регулировочную петлю адаптации торможения тягача приводят в действие от погрешности замедления, определяемой как:
Требование замедления - фактическое
---
Этого достигают, как показано на фиг.7, вводя в делитель 63 сигнал массы тягача по линии 64 и сигнал о нагрузке в сцепке по линии 65 и линии 66. Получающееся частное
вводят по линии 67 и элемент 68 вычита- , где его вычитают из погрешности замедления FE.
В случай, когда торможение тягача серьезно ослаблено, что приводит к общему низкому замедлению средства передвижения, но измерение нагрузки о сцепке дает Значительное напряжение. Торможение прицепа адаптируют на базе усилия в сцепке, которое в конечном счете будет умень- шено до нуля. Без модификации это вызовет неправильное уменьшение торможения прицепа, если не будет сделан допуск на низкое замедление средства передвижения. Погрешность замедления, образуемую из разницы требуемого замедления (линия 69 и) фактического замедления (линия 70), умножают на массу прицепа для генерации силового допуска, который вычитают из натяжения в сцепке, сильно снижая адапта- цию торможения прицепа, которая в противном случае имела бы место.
Это достигают, как показано на фиг.7, вводя D элемент 71 умножения сигнал массы прицепа по линии 72 и погрешность за- медления FE по линии 71, 73, а результат направляют в элемент 72-74 вычитания, где его вычитают из сигнала нагрузки в сцепке, поступающего по линии 65.
Однако в некоторых случаях цифру мае- сы прицепа нельзя вычислить, поэтому нельзя сделать вышеуказанный допуск. В этом случае принимают альтернативную методику, которая использует логическую схему фиг.8 для запрета петли адаптации прицепа. Эта логическая схема обнаруживает условия, при которых регулировка прицепа по превалирующим сигналам нагрузки в сцепке будет ошибочной. Схема обнаруживает комбинацию либо:
а) натянутой сцепки и низкого фактического замедления, либо:
б) сжатой сцепки и высокого фактического замедления,
В любом случае логическая схема вызывает отключение управляющей петли адаптации торможения прицепа.
Этого достигают, как показано на фиг.8 тем, что сигнал FE погрешности замедления и нагрузку в сцепке вместе подают ко входам двух компараторов 75, 76, поскольку компоненты и механизмы, связанные с установлением постоянной адаптации тягача, идентичны тем, что показаны на фиг.7. Ком- паратор 75 реагирует на условие, когда сцепка сжата, а погрешность замедления положительна; компаратор 76 реагирует на условие, когда сцепка натянута, а погрешность замедления отрицательна. Выходы
компараторов, подключают через вентиль ИЛИ 77 к управляющему входу переключателя 78, который выборочно включает постоянную адаптации прицепа в случае, когда включены либо один, либо оба компаратора.
Формула изобретения 1. Электронная система управления торможением оборудованного двигателем тягача, способного буксировать прицеп, не имеющий собственной электронной системы управления, содержащая управляемый водителем двухконтурный задатчик интенсивности торможения, выходы которого подключены к самонастраивающимся контурам управления модуляторами давления в тормозных приводах отдельных осей тягача, каждый из которых включает в себя блок коррекции управляющего сигнала, имеющий входы для подключения каналов подачи сигналов продольного уклона дороги, весовой нагрузки и адаптивной константы, датчики линейной скорости и замедления тягача, датчики осевой весовой нагрузки тягача, датчик продольного уклона дороги и устройство вычисления адаптивной константы, к входу которого подключен канал подачи сигнала погрешности замедления тягача, отличающаяся тем, что, с целью повышения эффективности торможения, она снабжена дополнительным самонастраивающимся контуром управления модулятором давления в тормозном приводе прицепа, подключенным к выходам эадат- чика интенсивности торможения, и датчиком продольного усилия в сцепном устройстве, при этом дополнительный самонастраивающийся контур управления, выполненный аналогично основным самонастраивающимся контурам управления, снабжен устройством корректировки входных сигналов устройств вычисления адаптивных констант в зависимости от величины продольного усилия в сцепном устройстве и устройством для определения весовой нагрузки прицепа, состоящим из делителя, входы которого подключены к датчику замедления тягача и к датчику продольного усилия, а выход через ключ - к входу элемента памяти, выход которого соединен с соответствующим входом дополнительного самонастраивающегося контура управления, а управляющий вход ключа соединен с выходом селектора, к входам которого подключены датчики скорости и замедления тягача и датчик продольного уклона, причем к выходу устройства вычисления адаптивной константы дополнительного са.монзстраивающегося контура управления подключен датчик продольного усилия в сцепном устройстве.
2. Система по n.1, о т л и ч а ю щ а я с я тем, что устройство для корректировки входных сигналов устройств вычисления адаптивной константы включает в себя делитель, первый вход которого подключен к датчику продольного усилия в сцепном устройстве, второй вход - к каналу подачи сум- марного сигнала от датчиков осевой весовой нагрузки тягача, а выход - к инверсному входу сумматора, выход которого подключен к входам устройств вычисления адаптивной константы основных самонастраивающихся контуров управления, а прямой вход указанного сумматора подключен к каналу подачи сигнала погрешности за- медления тягача, который также подключен к первому входу умножителя, второй вход которого соединен с каналом подачи сигнала весовой нагрузки прицепа, а выход - с инверсным входом другого сумматора, пря- мой вход которого соединен с датчиком продольного усилия в сцепном устройстве, а выход- с входом устройства вычисления адаптивной константы дополнительного самонастраивающегося контура управле- ни$.
3
3. Система по п,1, о т л и ч а ю щ а я с я тем, что устройство для корректировки входных сигналов устройств вычисления адаптивной константы включает в себя делитель, первый вход которого подключен к датчику продольного усилия в сцепном устройстве, второй вход - к каналу подачи суммарнного сигнала отдатчиков осевой весовой нагрузки тягача, а выход - к инверсному входу сумматора, выход которого подключен к входамустройств вычисления адаптивной константы основных самонастраивающихся контуров управления, а прямой вход указанного сумматора подключен к каналу подачи сигнала погрешности замедления тягача, который подключен к одним входам двух компараторов, к другим входам которых подключен датчик продольного усилия в сцепном устройстве, а к выходам - входы элемента ИЛИ, выход которого соединен с управляющим входом ключа, соединяющего датчик продольного усилия в сцепном устройстве с входом устройства вычисления адаптивной константы в допол- нительном самонастраивающемся контуре управления.
Изобретение предназначено для использования в транспортном машиностроении, в частности в электропневматических или гидропневматических тормозных приводах многозвенных транспортных средств. Сущность изобретения: система содержит за- датчик интенсивности торможения в виде преобразователя 1, к выходам которого подключены электронные устройства 2 и 36 управления тормозными приводами тягача и прицепа. Указанные устройства 2 и 36 обеспечивают уровень сигнала давления в прицепе так, чтобы он был функцией сигнала от преобразователя 1, модифицированного в зависимости от продольного усилия в сцепном устройстве, определяемого датчиком 37. 2 з.п. ф-лы 10 ил.
/V
J5.
17
Ю
UJ
19
Фиг.2
19
v
.69
--5
29
65
v
89
99
09
Ш6С81
70Фиг. 6
Фиг 7
о
63:
78
Т
Фигв 76/
Фиг.10
| Система торможения транспортного средства | 1986 |
|
SU1526570A3 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
