Изобретение относится к измерительной технике и может быть использовано для определения осевой нагрузки на шарикоподшипниковые опоры роторов силовых гироскопов и двигателей-маховиков, вращающихся на рабочих оборотах и не вращающихся, методом контроля осевой собственной частоты вынужденных колебаний ротора, а также для определения и контроля собственных частот колебаний роторов небольших механизмов и приборов.
Известно устройство для измерения предварительной осевой нагрузки в подшипниках роторов методом определения резонансной частоты колебаний подшипника, состоящее из подвеса для подшипника, механизма создания предварительной нагрузки на подшипник, механизма возбуждения колебаний, датчика вибраций (см. патент US №6286374, кл. F16C 25/08, G01L 5/00, 1999 г.).
Недостатки известного технического решения заключаются в том, что данное устройство имеет ограниченную область использования, так как применяется только для измерения осевой нагрузки подшипников опоры ротора открытого типа и не может быть использовано для вибрационной диагностики герметичных роторов силовых гироскопов, а также для определения осевой собственной частоты колебаний и осевой нагрузки в шарикоподшипниковых опорах в условиях вакуума и широкого диапазона температур.
Известна установка измерения собственной частоты колебаний роторов силовых гироскопов, содержащая магнитоэлектрические обратные преобразователи, связанные с системой подвеса для установки силового гироскопа, устройство возбуждения колебаний, систему управления работой установки. Установка оснащена вакуумной камерой с крышкой, магнитоэлектрические обратные преобразователи размещены на корпусе вакуумной камеры, а система подвеса - в вакуумной камере, причем установка оснащена системой вакуумирования камеры и системой терморегуляции полости камеры, размещенной в крышке камеры, при этом, система терморегуляции состоит из элементов Пельтье и радиаторов, на которых установлены вентиляторы, причем элементы Пельтье и приводы вращения вентиляторов имеют возможность соединения с системой управления (см. патент РФ №2515424, кл. G01M 13/02, 2012 г.) - наиболее близкий аналог.
Недостаток известной установки заключается в том, что ее конструкция обладает низкой помехозащищенностью, связанной с прохождением вибрации фундамента на чувствительный элемент вибропреобразователя и с воздействием вибрации подшипников вращающего ротора и толкающей системы на фундамент. Конструкция используемого в установке подвеса не позволяет регулировать его осевое положение в горизонтальной плоскости и не ограничивает степени свободы подвеса в горизонтальной плоскости. Также не контролируется величина поперечной составляющей толкающей силы магнитоэлектрического обратного преобразователя. В процессе измерений не производится контроль уровня рабочего виброускорения, что может привести к повреждению опор ротора. Все это снижает функциональные возможности установки.
Техническим результатом настоящего изобретения является расширение функциональных возможностей стенда контроля осевой нагрузки (СКОН) узла шарикоподшипниковых опор роторов силовых гироскопов и двигателей-маховиков, увеличение помехозащищенности и повышение точности измерений, за счет:
- использования магнитоэлектрического преобразователя (МЭП) виброскорости сейсмического типа для уменьшения влияния внешних воздействий на результат измерений, увеличение помехозащищенности с основания фундамента на подшипники контролируемых роторов;
- определения и контроля осевой собственной частоты вынужденных колебаний ротора по амплитуде виброскорости, снимаемой с магнитоэлектрического преобразователя, который слабо реагирует на высокочастотные вибрации подшипниковых опор роторов;
- контроля с помощью пьезоэлектрического вибропреобразователя уровня виброускорений создаваемого вибрационного воздействия на контролируемый гироскопический прибор;
- контроля величины поперечной составляющей толкающей силы (вибрационного воздействия) с помощью трехосного пьезоэлектрического вибропреобразователя;
- конструкции упругих ножек основания СКОН, обеспечивающих минимальные потери на трение, а также обеспечивающих значительное уменьшение (снижение) уровня вибраций, передаваемых с фундамента на подвесную систему и обратно;
- создания упругими герметичными элементами (сильфонами) сил, компенсирующих односторонние осевые движения МЭП и устройство возбуждения колебаний - магнитоэлектрического обратного преобразователя (МЭОП);
- конструкции упругих элементов подвеса, позволяющих снизить поперечные составляющие колебаний подвеса в горизонтальной плоскости.
Указанный технический результат достигается тем, что в стенде контроля осевой нагрузки узла шарикоподшипниковых опор роторов силовых гироскопов и двигателей-маховиков, содержащем магнитоэлектрический преобразователь, связанный с системой подвеса для установки силового гироскопа или двигателя-маховика, устройство возбуждения колебаний, теплоизолированную вакуумную камеру, систему терморегуляции полости камеры, систему управления работой стенда, новым является то, что стенд оснащен теплоизолированной вакуумной камерой, внутри камеры располагается на упругих элементах система подвеса, связанная с магнитоэлектрическим преобразователем и устройством возбуждения вибраций через упругие герметичные элементы, например, сильфоны, также стенд оснащен внешней системой терморегулирования полости теплоизолированной вакуумной камеры, состоящей из камеры тепла и холода и блока принудительной вентиляции, причем снаружи на основании камеры стенда размещены упругие ножки, имеющие не жесткую неметаллическую цилиндрическую опору и регулировку по высоте.
Сущность изобретения поясняется графическими материалами, на которых:
- на фиг. 1 изображен общий вид стенда контроля осевой нагрузки узла шарикоподшипниковых опор роторов силовых гироскопов и двигателей-маховиков, включая стойку с электронно-вычислительным оборудованием и систему терморегулирования;
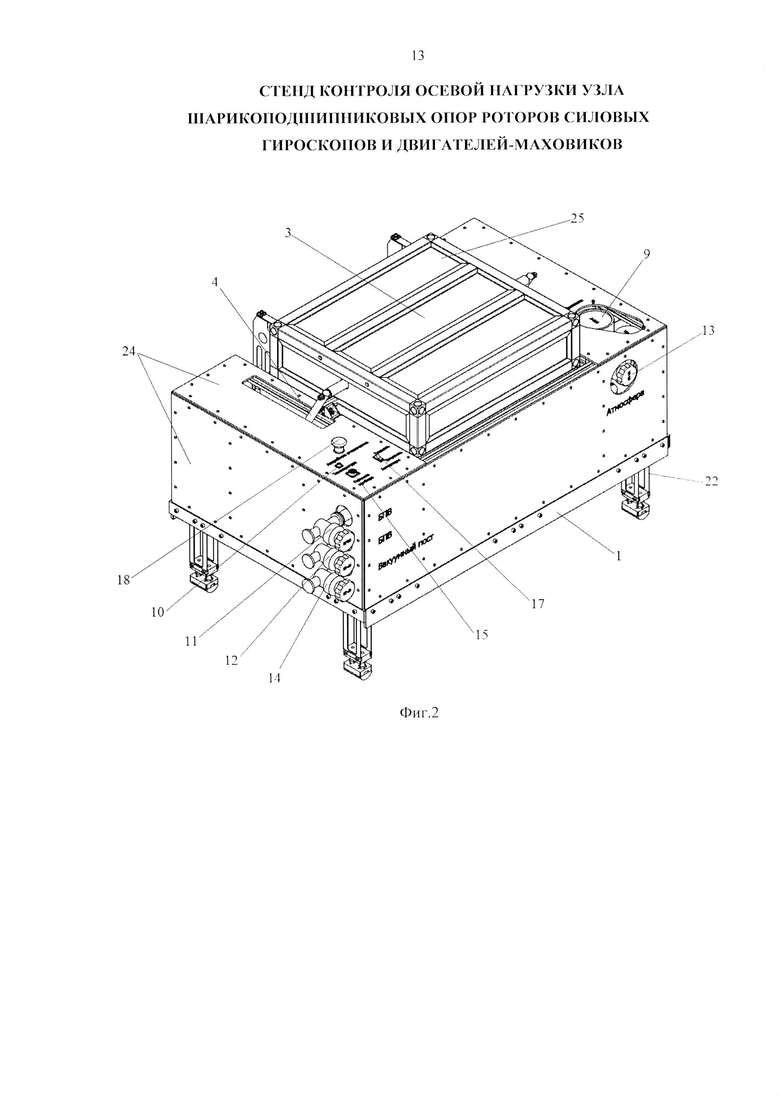
- на фиг. 2 изображен изометрический вид механической части стенда;
- на фиг. 3 изображен изометрический вид механической части стенда без крышки;
- на фиг. 4 сечение вида спереди механической части стенда без крышки, внешних кожухов и теплоизоляции;
- на фиг. 5 изображена схема системы терморегуляции стенда;
- на фиг. 6 изображена схема вакуумная стенда. Установка оснащена системой управления (СУ) которая:
- в системе терморегулирования обеспечивает контроль за значением температуры внутри полости камеры стенда с помощью датчика температуры и вывод на экран рекомендаций оператору по управлению камерой тепла и холода (КТХ) и блока принудительной вентиляции (БПВ);
- в системе вакуумирования и контроля вакуума обеспечивает контроль за уровнем давления внутри камеры стенда с помощью датчиков давления и вывод на экран рекомендаций оператору по управлению вакуумным насосом;
- в системе создания и контроля вибраций:
1) задает амплитуду управляющего воздействия, диапазон частот и шаг, с которым происходит воздействие возбуждающей силы на подвес;
2) получает данные с вибропреобразователя со встроенной электроникой через аналого-цифровой преобразователь (АЦП) для анализа и контроля уровня рабочего ускорения, создаваемого возбуждающей силой на подвес стенда;
3) получает данные с трехосного вибропреобразователя через АЦП для анализа и контроля величины поперечной составляющей толкающей силы;
- от системы регистрации вибраций СУ получает данные с магнитоэлектрического преобразователя виброскорости через АЦП для анализа и определения осевой собственной частоты вынужденных колебаний ротора.
Стенд контроля осевой нагрузки узла шарикоподшипниковых опор роторов силовых гироскопов и двигателей-маховиков содержит основание 1 (фиг. 1), на котором расположена теплоизолированная вакуумная камера 2 с откидывающейся крышкой 3, соединенной с актуаторами 4, расположенными на основании 1. Стенд также содержит магнитоэлектрический преобразователь 5 и магнитоэлектрический обратный преобразователь 6, систему подвеса 7, размещенную в полости вакуумной камеры 2. систему терморегулирования 8, расположенную снаружи стенда. На корпусе стенда имеются: выводы из вакуумной камеры разъемов для чувствительных элементов датчиков давления 9 и температуры 10; вводы для клапанов откачки 11 и подачи воздуха 12 от системы терморегулирования 8, клапан 13 для подачи воздуха из атмосферы, клапан 14 для откачки воздуха из камеры; разъем 15 для питания контролируемого объекта 16 (силового гироскопа или двигателя-маховика); кнопка 17 для поднятия и опускания актуаторов 4; кнопка 18 аварийного отключения питания стенда. В комплект стенда входит стойка 19 с электронно-вычислительным оборудованием (система управления). Стенд оснащен вибропреобразователями 20 и 21. Основание установлено на гибких регулируемых по высоте опорах 22.
Внешние стенки вакуумной камеры 2 и крышки 3 покрыты теплоизолятором 23 и закрыты кожухами 24 и 25.
Система терморегуляции 8 состоит из КТХ 26 и БПВ 27, связанных между собой и вакуумной камерой гибкими шлангами и клапанами 11 и 12.
Система подвеса 7 состоит из подвеса 28, упругих стержней 29 для регулировки по высоте, стержней 30 для регулировки в горизонтальной плоскости, гибких пластин 31 для обеспечения создания колебаний в осевом направлении.
МЭП 5 и МЭОП 6 связаны с системой подвеса 7 через фланцы 32, толкатели 33 и упругие герметичные элементы 34 (сильфоны), которые установлены на вакуумную камеру 2 и позволяют передавать вибрационное воздействие от устройства возбуждения колебаний - МЭОП 6, к МЭП 5. Упругие герметичные элементы 34 (сильфоны) расположены на одной оси и компенсируют односторонние осевые движения МЭП 5 и МЭОП 6. МЭП 5 установлен на стойку 35 с гибкими пластинами на основание 1. МЭОП 6 установлен на жесткую стойку 36 на основании 1. Стойки 35 и 36 позволяют регулировать положение МЭП 5 и МЭОП 6 соответственно по длине, высоте и ширине (с помощью пазов).
Вибропреобразователь 20 установлен на фланце 32, соединенным с катушкой МЭП 5, и связан через блок питания 37 вибропреобразователя с АЦП 38, установленным на стойке 19.
Вибропреобразователь 21 расположен на подвесе 28, связан через блок питания 37 вибропреобразователя с АЦП 38, установленным на стойке 19.
На стойке 19 также размещены генератор 39, усилитель мощности 40, вычислительная мощность 41 (компьютер), блок управляющей электроники 42.
Снаружи стенда размещен вакуумный насос 43.
Стенд контроля осевой нагрузки узла шарикоподшипниковых опор роторов силовых гироскопов и двигателей-маховиков работает следующим образом.
В зависимости от требований испытаний конкретного контролируемого объекта 16 возможно шесть вариантов использования стенда контроля осевой нагрузки
- испытания без нагрева с вакуумированием;
- испытания с нагревом с вакуумированием;
- испытания с охлаждением с вакуумированием;
- испытания с нагревом без вакуумирования;
- испытания с охлаждением без вакуумирования;
- испытания без нагрева без вакуумирования.
В общем случае определение осевой нагрузки на шарикоподшипниковые опоры роторов силовых гироскопов и двигателей-маховиков, вращающихся на рабочих оборотах и не вращающихся, методом контроля осевой собственной частоты вынужденных колебаний ротора на стенде проводится в следующей последовательности:
1. Подготовка стенда к проведению испытаний. Подготовка включает в себя: включение в сеть всех агрегатов установки, размещенных на стойке 19, включение блока управления 42, вычислительной мощности 41 (компьютера).
2. Установка на силовой гироскоп или двигатель-маховик технологического приспособления для закрепления. Операция включает в себя установку вручную технологического приспособления для закрепления силового гироскопа или двигателя-маховика.
3. Установка контролируемого объекта 16 на подвес 28 вакуумной камеры. Операция включает в себя установку силового гироскопа или двигателя-маховика с помощью технологического приспособления на систему подвеса 7.
4. Герметизация камеры. Герметизация камеры включает в себя закрытие и прижатие крышки 3 на вакуумную камеру 2 с помощью актуаторов 4.
5. Нагрев/охлаждение контролируемого объекта 16 до заданной температуры. Проверяется схема соединения системы терморегулирования в соответствии с фиг. 5. Включается камера тепла и холода 26, блок принудительной вентиляции 27, открываются ручные клапаны 11 и 12. Далее снимается информация о температуре с чувствительного элемента датчика температуры 10, которая обрабатывается системой управления. При достижении температуры внутри камеры 2 заданного значения через блок управления 42 происходит вывод информации оператору на вычислительную мощность 41 об отключении камеры тепла и холода 26 и БПВ 27 и закрытии клапанов 11 и 12. Система терморегуляции 8 обеспечивает нагрев полости вакуумной камеры 2 до +50°C и охлаждение ее до -20°C.
6. Вакуумирование камеры. Вакуумирование камеры включает в себя открытие ручного клапана 14 для откачки воздуха, включение вакуумного насоса 43 на откачивание воздуха из камеры. Далее снимается информация о давлении внутри камеры с чувствительного элемента датчика давления 9, которая обрабатывается системой управления. При достижении заданного испытаниями значения давления, оператором выключается вакуумный насос 43, закрывается клапан 14 откачки воздуха.
7. Включение силового гироскопа или двигателя-маховика. Операция включает в себя подачу питания на разъем 15 для питания силового гироскопа или двигателя-маховика.
8. Настройка стенда на определение осевой собственной частоты колебаний ротора силового гироскопа или двигателя-маховика.
Установить на вычислительной мощности 41 в окне специального программно-математического обеспечения:
- рабочий диапазон частот (в Гц), в котором требуется определить собственную частоту колебаний ротора;
- шаг (в Гц), с которым необходимо сканировать рабочий диапазон;
- максимальное значение рабочего ускорения (в м/с2, не более 9.8 м/с2).
Нажать кнопку «Пуск» для автоматической работы стенда.
Синусоидальное электрическое напряжение, дискретно регулируемое по частоте, подается от генератора 39 через усилитель мощности 40 на возбудитель механических колебаний - магнитоэлектрический обратный преобразователь 6, который вызывает колебания контролируемого объекта 16 через систему подвеса 7. Выходное напряжение с МЭОП 6 подается на блок управления 42, АЦП 38 и на вычислительную мощность 41. Величина создаваемого вибрационного воздействия поддерживается постоянной величиной использованием программно-математического обеспечения.
В процессе создания вибраций происходит измерение и контроль величины виброускорения, снимаемого с вибропреобразователя 20. Выходное напряжение с вибропреобразователя 20 подается на предварительный усилитель, АЦП 38 и далее - на вычислительную мощность 41.
Измерение и контроль величины поперечных составляющих толкающей силы происходит с помощью трехосного вибропреобразователя 21. Выходное напряжение с трехосного вибропреобразователя 21 подается на предварительный усилитель, АЦП 38 и далее - на вычислительную мощность 41. Колебания подвеса, с установленным на нем контролируемым объектом 16, воспринимаются магнитоэлектрическим датчиком виброскорости 5. Выходное напряжение с МЭП 5 подается блок управления 42, на АЦП 38, и далее на вычислительную мощность 41, в которой программно-математическое обеспечение вычисляет разность между фазой возбуждающей силой и фазой реакции на возбуждение и определяет значение осевой собственной частоты колебаний ротора контролируемого объекта 16 по переходу через 0° полученной фазовой характеристики. Результаты измерений сохраняются на вычислительной мощности 41 и выводятся оператору, который, анализируя данную информацию, принимает решение о проведении измерения собственной частоты или изменении настроек стенда и повтор действий по п. 8.
9. Определение осевой собственной частоты колебаний ротора. Для определения значения собственной частоты колебаний задать на вычислительной мощности 41 в окне специального программно-математического обеспечения рабочий диапазон (в Гц), установить шаг (в Гц), обеспечивающий требуемую точность измерений, и нажать кнопку «Пуск» для автоматической работы стенда. Работа стенда продолжится в автоматическом режиме, как в п. 8. Результаты измерений сохраняются на вычислительной мощности 41 и выводятся оператору.
10. Контроль измеренного значения осевой собственной частоты колебаний ротора силового гироскопа или двигателя-маховика с паспортным значением. Сравнивая измеренное значение осевой собственной частоты колебаний ротора силового гироскопа или двигателя-маховика с паспортным значением, определенным при изготовлении прибора на стадии выставки осевой нагрузки шарикоподшипникового узла, судят о величине осевой нагрузки при различных испытаниях и на разных стадиях сборки прибора.
11. Подготовка системы к извлечению силового гироскопа или двигателя-маховика. Включает в себя выключение всех агрегатов стенда, размещенных на стойке 19, кроме блока управления 42. Открывают клапан 13 для подачи воздуха из атмосферы. Снимают информацию о давлении внутри камеры 2 с чувствительного элемента датчика давления 9. При достижении значения давления, равного давлению в помещении, в котором проводятся испытания, закрывают клапан 13 для подачи воздуха.
12. Извлечение контролируемого объекта 16 камеры 2. Выполняется в следующей последовательности: с помощью актуаторов 4 откидывается крышка 3, выдерживается время, когда температура в помещении и температура в камере выровняется, после чего извлекают из камеры силовой гироскоп или двигателя - маховик. Выключают все электронно-вычислительные приборы.
Стенд позволяет определять осевую нагрузку на узлы шарикоподшипниковых опор роторов силовых гироскопов и двигателей-маховиков, в том числе вращающихся на рабочих оборотах, методом контроля осевой собственной частоты вынужденных колебаний ротора. Стенд позволяет определять осевую нагрузку на различных этапах сборки силовых гироскопов и двигателей-маховиков в условиях вакуума, высоких и низких температур, что расширяет функциональные возможности проведения испытаний. Использование стенда позволит повысить эксплуатационные характеристики и долговечность силовых гироскопов и двигателей-маховиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ СОБСТВЕННОЙ ЧАСТОТЫ КОЛЕБАНИЙ РОТОРОВ СИЛОВЫХ ГИРОСКОПОВ | 2012 |
|
RU2515424C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2158902C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2002 |
|
RU2235976C2 |
| СТЕНД КОНТРОЛЯ МЕХАНИЧЕСКИХ ПАРАМЕТРОВ ГИРОСКОПОВ | 2007 |
|
RU2363930C1 |
| ИЗМЕРИТЕЛЬ ПРОСТРАНСТВЕННЫХ ВИБРАЦИЙ | 2010 |
|
RU2454644C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Способ уменьшения вибрационных погрешностей гироплатформы на динамически настраиваемых гироскопах | 2020 |
|
RU2750180C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |




Изобретение относится к измерительной технике и может быть использовано для определения осевой нагрузки на шарикоподшипниковые опоры роторов, а также для определения и контроля собственных частот колебаний роторов небольших механизмов и приборов. Устройство содержит магнитоэлектрический преобразователь, связанный с системой подвеса для установки силового гироскопа или двигателя-маховика, устройство возбуждения колебаний, теплоизолированную вакуумную камеру, систему терморегуляции полости камеры, систему управления работой стенда. Дополнительно устройство оснащено теплоизолированной вакуумной камерой, внутри камеры располагается на упругих элементах система подвеса, связанная с магнитоэлектрическим преобразователем и устройством возбуждения вибраций через упругие герметичные элементы, например сильфоны. Также устройство оснащено внешней системой терморегулирования полости теплоизолированной вакуумной камеры, состоящей из камеры тепла и холода и блока принудительной вентиляции. Технический результат заключается в расширении функциональных возможностей стенда, увеличении помехозащищенности, повышении точности измерений. 1 з.п. ф-лы, 6 ил. 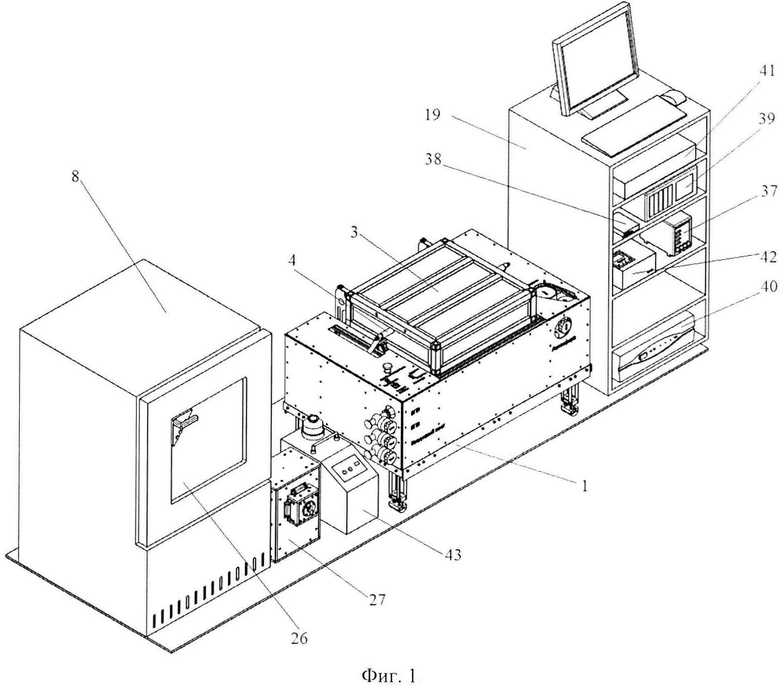
1. Стенд контроля осевой нагрузки узла шарикоподшипниковых опор роторов силовых гироскопов и двигателей-маховиков, содержащий магнитоэлектрический преобразователь, связанный с системой подвеса для установки силового гироскопа или двигателя-маховика, устройство возбуждения колебаний, теплоизолированную вакуумную камеру, систему терморегуляции полости камеры, систему управления работой стенда, отличающийся тем, что стенд оснащен теплоизолированной вакуумной камерой, внутри камеры располагается на упругих элементах система подвеса, связанная с магнитоэлектрическим преобразователем и устройством возбуждения вибраций через упругие герметичные элементы, например сильфоны, также стенд оснащен внешней системой терморегулирования полости теплоизолированной вакуумной камеры, состоящей из камеры тепла и холода и блока принудительной вентиляции.
2. Стенд по п. 1, отличающийся тем, что на основании камеры стенда размещены упругие ножки, имеющие не жесткую неметаллическую цилиндрическую опору и возможность регулировки по высоте.
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ СОБСТВЕННОЙ ЧАСТОТЫ КОЛЕБАНИЙ РОТОРОВ СИЛОВЫХ ГИРОСКОПОВ | 2012 |
|
RU2515424C1 |
| US 6286374 B1, 11.09.2001 | |||
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |

