Изобретение относится к измерительной технике, в частности к испытательным стендам для контроля гироскопов.
Известен стенд для комплексных испытаний бесплатформенных инерциальных измерительных блоков на основе микромеханических гироскопов, содержащий основание с термокамерой, смонтированную на основании в термокамере поворотную платформу, соединенную с приводом, размещенный на платформе двухкоординатный карданный подвес с пластиной для установки изделия. Режимы испытания изделия задаются с персонального компьютера и проводятся по заложенной в него программе. Компьютер и механическая часть стенда связаны друг с другом через аналого-цифровой преобразователь (см. патент РФ, №2256880, G01C 21/00, 2004 г.) - наиболее близкий аналог.
В результате анализа известного решения необходимо отметить, что известный стенд сложен конструктивно, неудобен в эксплуатации и имеет довольно низкую точность измерения.
Задачей настоящего изобретения является разработка стенда контроля механических параметров гироскопов, достаточно простого конструктивно, удобного в эксплуатации, но в то же время позволяющего проводить измерения с высокой точностью.
Поставленная задача обеспечивается тем, что в стенде контроля механических параметров гироскопов, состоящем из состыкованных друг с другом электронного модуля и механической части, представляющей собой основание с подвижным элементом, предназначенным для размещения на нем контролируемого изделия, новым является то, что подвижный элемент смонтирован на основании посредством упругого подвеса, выполненного в виде закрепленного на основании корпуса, на котором концами закреплены пендельфедеры и торсион, предназначенные соответственно для восприятия поперечной и осевой нагрузок подвижного элемента и имеющие возможность соединения с ним, причем стенд снабжен датчиком углового положения подвижного элемента, датчиком его угловой скорости, магнитоэлектрическими датчиками момента, а также усилителями, подвижные элементы датчиков угла и скорости установлены на подвижном элементе, а неподвижные - на основании, при этом датчики связаны соответственно со входами усилителя сигналов углового положения подвижного элемента и его угловой скорости, а выходы этих усилителей связаны с магнитоэлектрическими датчиками момента, катушки которых установлены на подвижном элементе, при этом стенд может быть снабжен потенциометрами, выход которых соединен с входом усилителя угловой скорости, и элементом «установки нуля» показаний моментомера, связанного через усилитель с магнитоэлектрическими датчиками момента.
При проведении патентных исследований из уровня техники не выявлены решения, идентичные заявленному, а следовательно, заявленное изобретение соответствует условию охраноспособности «новизна».
Сущность заявленного изобретения не следует явных образом из решений, известных из уровня техники, а следовательно, заявленное изобретение соответствует условию охраноспособности «изобретательский уровень».
Сведений, изложенных в материалах заявки, достаточно для практического осуществления изобретения.
Сущность заявленного изобретения поясняется графическими материалами, на которых:
на фиг.1 - компоновка стенда;
на фиг.2 - механическая часть стенда (кожух снят);
на фиг.3 - упругий подвес стенда;
на фиг.4 - механическая часть стенда с установленным изделием;
на фиг.5 - блок-схема стенда;
на фиг.6 - график записи моментных характеристик контролируемого изделия.
Стенд контроля механических параметров гироскопов комплектуется из механической части 1, электронного модуля 2 и компьютера с аналого-цифровым преобразователем 3 и соответствующим программным обеспечением.
Механическая часть стенда содержит основание 4, на котором смонтирован чувствительный элемент 5. Монтаж чувствительного элемента 5 осуществляется посредством упругого подвеса 6.
На основании 4 размещен арретирующий механизм 7.
На основании 1 также установлены магнитные системы 8 и неподвижные элементы датчиков угла 9 отклонения чувствительного элемента.
На чувствительном элементе 5 размещены измерительные 10 и силовые 11, 12, 13 катушки, а также подвижные элементы 14 датчиков угла.
Упругий подвес 6 представляет собой корпус 15, зафиксированный на основании 4. На корпусе расположена втулка 16. Подвес также содержит пендельфедеры 17 и 18, торсион 19 с зажимами 20. Один конец каждого пендельфедера закреплен на корпусе 15, а другой - на втулке 16 таким образом, что все пендельфедеры (три верхних и три нижних) пересекаются на оси торсиона. Пендельфедеры воспринимают поперечную нагрузку, а торсион - продольную.
Подлежащее контролю изделие 21 устанавливают на чувствительном элементе 5 стенда.
Электронный модуль 2 представляет собой блок 23 усилителей обратной связи, содержащий усилитель 24 сигналов углового канала, усилитель 25 сигналов канала угловой скорости. Данный блок также содержит элемент 26 установки нуля. На лицевую панель 27 модуля 2 выведена ручка 28 установки нуля, а также потенциометры «Демпфирование»: 29 - «грубо» и 30 - «точно». Ручка 28 связана с блоком установки нуля. Потенциометры 29 и 30 связаны с первым входом блока 25, второй вход которого связан с измерительными катушками 12.
Выход блока 26 связан с силовыми катушками 11, а выход блока 24 - с силовыми катушками 13. Вход блока 24 связан с неподвижными элементами 9 датчиков угла.
Силовые катушки 11, 12, 13, а также измерительные катушки 10 и подвижные элементы 14 размещены на чувствительном элементе 5.
Выполнение блоков электронного модуля и элементов механической части, не раскрытое в материалах настоящей заявки, является известным из уровня техники и не составляет предмета патентной охраны в данной заявке.
Стенд контроля механических параметров гироскопов функционирует следующим образом.
Контролируемое изделие 21 при помощи переходника 22 устанавливается на чувствительном элементе 5.
Действие стенда основано на регистрации компьютером величины момента, действующего на подвижную часть стенда контроля механических параметров гироскопов. Момент, действующий на подвижную часть стенда, образуется в соответствии с основным законом динамики твердого тела, вращающегося вокруг оси, то есть:

где H - момент импульса системы (кинетический момент системы);
H=J*w;
Mвнеш - момент внешних сил относительно оси вращения;
Mвнеш=Mэд-Mнн;
J - осевой момент инерции вращающейся части (ротора электродвигателя);
w - скорость вращения твердого тела (ротора электродвигателя).
Мэд - момент, развиваемый электродвигателем;
Mнн - момент нагрузки на «валу» испытываемого электродвигателя.
Если момент инерции вращающейся части принять постоянным, можно записать:

Следовательно, для любого изменения скорости твердого тела необходимо наличие внешнего вращающего момента. То есть стенд может быть использован для регистрации момента, развиваемого испытываемым гироскопом:
- в процессе пуска и последующего разгона ротора;
- в процессе выбега (торможения силами сопротивления, развиваемыми элементами конструкции гироскопа без участия внешних источников энергии и других специально создаваемых сил);
- в установившемся режиме вращения ротора (рабочем режиме).
В процессе пуска и разгона ротора (участок 1 фиг.6) стенд измеряет избыточный момент, создаваемый испытываемым гироскопом.
В процессе выбега (участок 3 фиг.6) стенд измеряет момент нагрузки на валу.
В установившемся режиме (участок 2 фиг.6) вращения ротора стенд измеряет момент внешней нагрузки на валу гироскопа.
Преобразование момента в электрическую величину (напряжение) представлено на блок-схеме стенда (фиг.5).
Момент, действующий на подвижную часть моментомера, вызывает смещение от нейтрального положения ротора фотоэлектрических датчиков углового положения.
Фотоэлектрические датчики углового положения вырабатывают фототок, пропорциональный возникшему смещению. Фототок датчиков углового положения преобразуется в напряжение усилителями сигналов углового канала, расположенных на плате усилителей обратной связи. Выход усилителя мощности углового канала подключен к катушке магнитоэлектрического датчика момента таким образом, что создаваемый им (датчиком момента) момент компенсирует действующий измеряемый момент.
Движение подвижной части моментомера прекратится в том случае, если создаваемый стендом компенсирующий момент станет равным действующему внешнему моменту. Зависимость момента, создаваемого датчиком момента, от конструкции и параметров его питания описывается зависимостью:
M=K*B*L*I;
где М - развиваемый момент;
К - коэффициент использования момента, развиваемого датчиком момента;
В - магнитная индукция в рабочем зазоре датчика момента;
L - длина провода в рабочем зазоре датчика момента;
I - ток, протекающий в катушке датчика момента.
Величины К, В, L являются постоянными для выбранной конструкции датчика момента, и, следовательно, момент, развиваемый датчиком момента, определяется величиной и направлением тока, протекающего в его катушке.
Таким образом, протекающий в катушке датчика момента ток (в состоянии равенства измеряемого и компенсирующего моментов) пропорционален компенсирующему моменту и, следовательно, измеряемому моменту. В моментомере протекающий в катушке датчика момента ток преобразуется в напряжение, которое при помощи аналого-цифрового преобразователя, установленного в компьютере, преобразуется в цифровой код и накапливается. Посредством программного обеспечения полученная информация обрабатывается, выводится на экран в единицах вращающего момента - Г*см, представляется в виде графика и записывается в файл для хранения.
Угловое движение подвижной части 5 воспринимается датчиками 10 угловой скорости. Датчики 10 вырабатывают напряжение, пропорциональное величине и направлению угловой скорости поворота подвижной части 5, которое усиливается усилителем обратной связи канала угловой скорости 25 блока 23. Выход усилителя канала угловой скорости 25 подключен к катушкам магнитоэлектрических датчиков 12 момента таким образом, что создаваемый ими (датчиками момента) момент направлен против направления движения подвижной части 5. Действие контура аналогично действию жидкости и приводит к потере кинетической энергии подвижной части, то есть к затуханию (демпфированию) ее колебаний. Эффективность демпфирования (потери кинетической энергии подвижной частью) зависит от коэффициента усиления контура. Для оперативной регулировки демпфирования (коэффициента усиления контура) на лицевую панель 27 электронного модуля выведены рукоятки потенциометров 29 и 30 «Демпфирование».
В процессе эксплуатации на подвижную часть стенда могут действовать различные «паразитные» моменты, действие которых выражается в смещении ее нулевых показаний.
Для компенсации действия паразитных моментов, имеющих постоянный характер, в электронном модуле 2 стенда предусмотрен канал установки нуля. Информацией для регулировки нуля является величина момента, измеряемого моментомером в покое. Наблюдая за показаниями моментомера, оператор вручную вращает рукоятку потенциометра «Установка 0» 28, установленного на лицевой панели 27 электронного модуля, и добивается допустимых (нулевых) показаний моментомера. При этом напряжение поступает на вход канала 26 установки нуля, выход которого подключен к катушкам магнитоэлектрических датчиков 11 момента таким образом, что создаваемый ими (датчиками момента) момент направлен против действующего паразитного момента. Наблюдая за изменениями показаний стенда и плавно вращая рукоятку потенциометра, добиваются допустимых (нулевых) показаний стенда.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА | 2012 |
|
RU2499984C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| ДВУХОСНЫЙ ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ СКОРОСТЕЙ С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2118796C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| СТЕНД КОНТРОЛЯ ОСЕВОЙ НАГРУЗКИ УЗЛА ШАРИКОПОДШИПНИКОВЫХ ОПОР РОТОРОВ СИЛОВЫХ ГИРОСКОПОВ И ДВИГАТЕЛЕЙ-МАХОВИКОВ | 2015 |
|
RU2608719C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
Изобретение относится к измерительной технике, в частности к испытательным стендам для контроля гироскопов. Технический результат - расширение функциональных возможностей. Для достижения данного результата стенд состоит из состыкованных друг с другом электронного модуля и механической части. Механическая часть содержит основание с подвижным элементом, предназначенным для размещения на нем контролируемого изделия. Подвижный элемент смонтирован на основании посредством упругого подвеса, выполненного в виде закрепленного на основании корпуса. Причем стенд снабжен датчиком углового положения подвижного элемента, датчиком угловой скорости, магнитоэлектрическими датчиками момента, усилителями. Подвижные элементы датчиков угла и скорости установлены на подвижном элементе, а неподвижные - на основании. 2 з.п. ф-лы, 6 ил.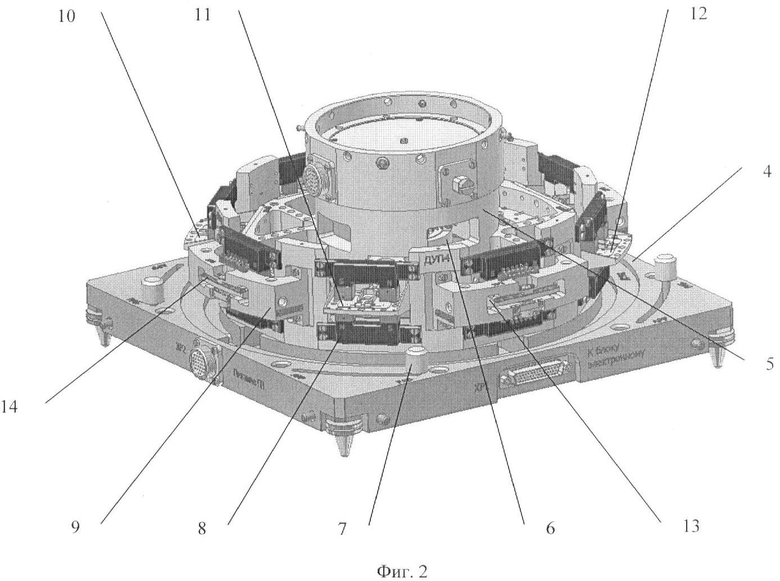
1. Стенд контроля механических параметров гироскопов, состоящий из состыкованных друг с другом электронного модуля и механической части, представляющей собой основание с подвижным элементом, предназначенным для размещения на нем контролируемого изделия, отличающийся тем, что подвижный элемент смонтирован на основании посредством упругого подвеса, выполненного в виде закрепленного на основании корпуса, на котором концами закреплены пендельфедеры и торсион, предназначенные соответственно для восприятия поперечной и осевой нагрузок подвижного элемента и имеющие возможность соединения с ним, причем стенд снабжен датчиком углового положения подвижного элемента, датчиком его угловой скорости, магнитоэлектрическими датчиками момента, а также усилителями, подвижные элементы датчиков угла и скорости установлены на подвижном элементе, а неподвижные - на основании, при этом датчики связаны соответственно со входами усилителя сигналов углового положения подвижного элемента и его угловой скорости, а выходы этих усилителей связаны с магнитоэлектрическими датчиками момента, катушки которых установлены на подвижном элементе.
2. Стенд по п.1, отличающийся тем, что он снабжен потенциометрами, выход которых соединен с входом усилителя угловой скорости.
3. Стенд по п.1, отличающийся тем, что он снабжен элементом «установки нуля» показаний моментомера, связанного через усилитель с магнитоэлектрическими датчиками момента.
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| Шепелев Н.И | |||
| Сборка, регулировка и испытание гироскопических приборов | |||
| - М.: Машиностроение, 1977, с.153-170, 192 | |||
| Ягодкин В.В., Хлебников Г.А | |||
| Гироскопические приборы баллистических ракет | |||
| - М.: Военное издание, 1967, с.54-77, 216 | |||
| Матвеев С.С | |||
| Гирокомпасы и | |||

