Изобретение относится к механизации технологических процессов и может быть использовано при разработке сборочных устройств для групповой сборки резьбовых деталей.
Известен многошпиндельный гайковерт для завинчивания крепежных элементов (А.с. №1340961, кл. B23P 19/06, 1987 г.), расположенных под острым углом друг к другу, содержащий расположенные на передних плитах два ряда шпинделей и средство подвески, при этом каждый ряд шпинделей подвижен относительно другого, каждый шпиндель оснащен инструментом для захвата одного из завинчивающих элементов, а плиты каждого ряда шпинделей шарнирно соединены между собой осью, закрепленной на средстве подвески, и опираются на регулировочные элементы.
Недостатком данного устройства является невозможность одновременной доориентации соединяемых деталей при групповой сборке при относительных смещениях осей более чем на 1 мм.
Наиболее близким по технической сущности к предлагаемому изобретению является многошпиндельный гайковерт для завинчивания шпилек с угловым рассогласованием осей (Патент РФ №2327556, кл. B23P 19/06, 2008 г.), в корпусе которого установлены подвижные шпиндели, каждый из которых имеет привод, снабженный фланцем, установленным на держателе. На шпинделе закреплен инструмент для захвата деталей, содержащий пружину. В зазоре между держателем и фланцем закреплена пружина подвеса. Фланец и держатель соединены между собой с образованием зазора средствами подвески.
Недостатками данного устройства являются сложность конструкции, вызванные наличием автономных приводов для каждого шпинделя, и ограниченные технологические возможности устройства, обусловленные невозможностью переналадки гайковерта на требуемые межцентровые расстояния, а также невозможностью завинчивания групповых резьбовых соединений с малыми межцентровыми расстояниями из-за больших габаритов приводов.
Задачей, решаемой изобретением, является устранение указанных недостатков.
Это достигается тем, что многошпиндельный гайковерт, содержащий корпус, размещенные в нем привод и несколько подвижных шпинделей с инструментом для захвата шпильки, оснащен центральной шестерней, кинематически связанной с приводом, муфтами, кинематически связанными с центральной шестерней с одной стороны и со шпинделями с другой стороны, зубчатыми передачами, расположенными на выходных валах муфт, подпружиненными карданными валами, шарнирно связанными со шпинделями с одной стороны и с выходными валами зубчатых передач с другой стороны, и рамой, закрепленной в зоне завинчивания. На раме установлены с возможностью поперечного перемещения планки. На планках с возможностью продольного перемещения установлены пластины с направляющими втулками под шпиндели.
Введение в кинематическую схему гайковерта центральной шестерни, связанной с приводом, и зубчатых передач, связанных с одной стороны с центральной шестерней, а с другой - со шпинделями, позволяет использовать только один привод, а не автономные для каждого шпинделя, как в прототипе, что значительно упрощает конструкцию и уменьшает габариты гайковерта по сравнению с прототипом.
Муфты предельного момента зубчатого типа, кинематически связанные со шпинделями, обеспечивают проскальзывание полумуфт при достижении на осях муфт требуемых значений моментов затяжки, что позволяет отключить вращение каждого шпинделя гайковерта по мере завершения процессов завинчивания и затяжки шпилек.
Карданные валы, обеспечивая угловую и относительную податливость соединяемых резьбовых деталей относительно отверстия на собираемом узле в процессе завинчивания и затяжки, позволяют изменять межцентровые расстояния между шпинделями гайковерта и настраивать его на сборочные узлы с разными межцентровыми расстояниями, что, в свою очередь, расширяет его технологические возможности по сравнению с прототипом.
Рама, закрепленная в зоне завинчивания, с размещенными в ней с возможностью поперечного перемещения планками, на которых с возможностью продольного перемещения установлены пластины с направляющими втулками под шпиндели, обеспечивает возможность переналадки гайковерта на завинчивание шпилек с произвольными значениями межцентрового расстояния между осями, что также расширяет технологические возможности заявляемого гайковерта по сравнению с прототипом.
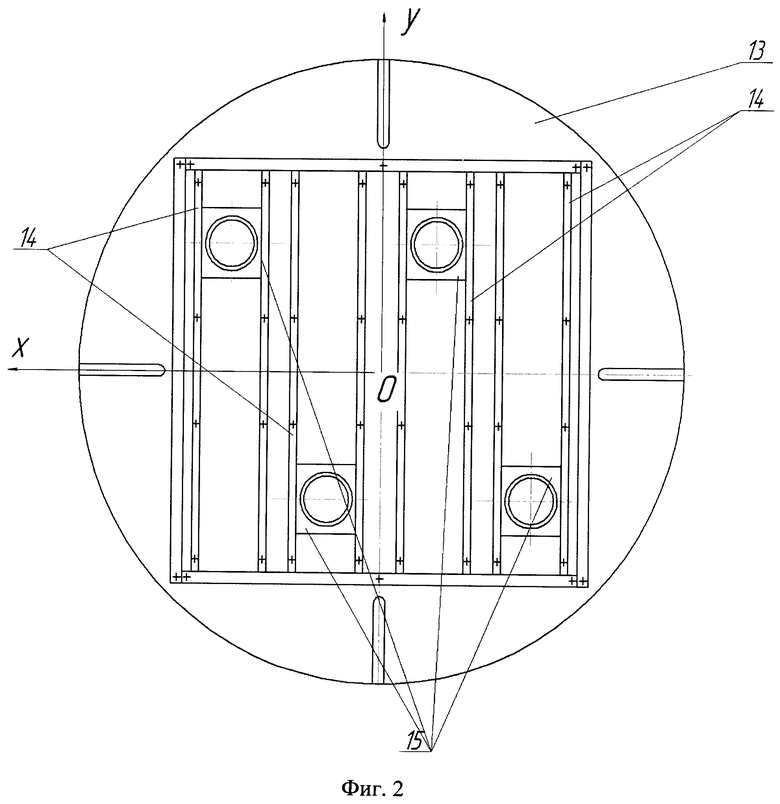
На фиг.1 изображена кинематическая схема многошпиндельного гайковерта.
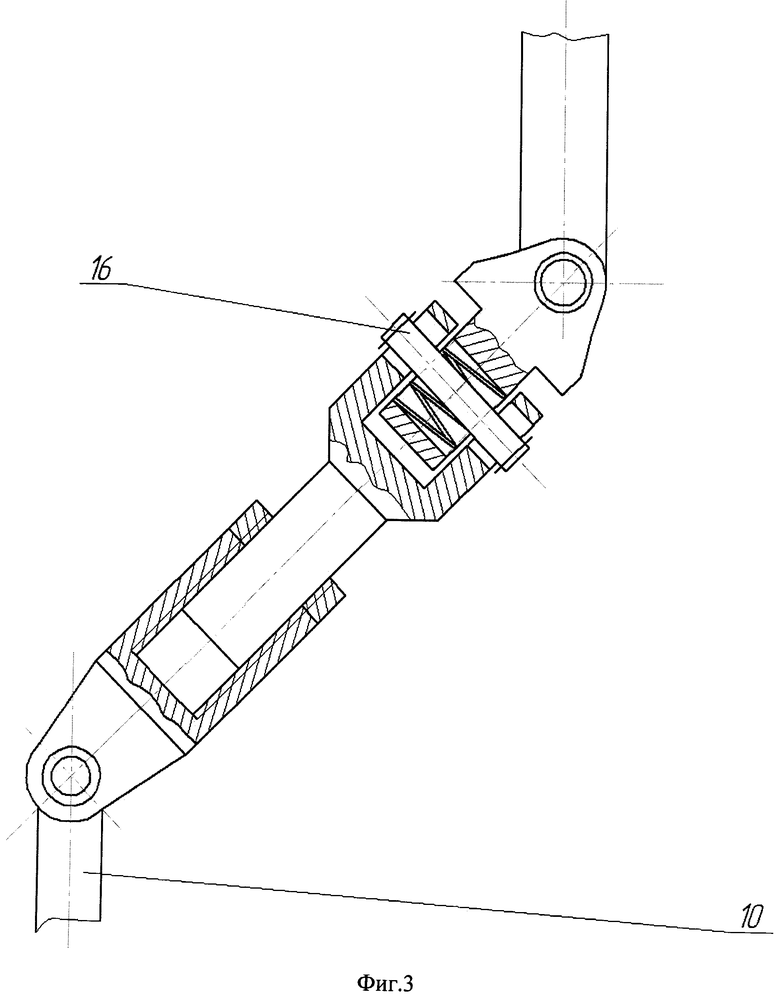
На фиг.2 - вид сверху на раму 13.
На фиг.3 - конструкция карданного вала.
Многошпиндельный гайковерт содержит корпус 1 с размещенным в нем двигателем 2, который через зубчатые передачи 3 и 4 связан с центральной шестерней 5, которая, в свою очередь, связана одновременно с несколькими зубчатыми колесами 6, число которых определяется максимальным количеством завинчиваемых деталей, разделяя вращательное движение на столько же кинематических ветвей через муфты предельного момента 7, зубчатые передачи 8, шарнирно закрепленные карданные валы 9 к шпинделям 10 с патронами 11. В нижней части корпуса 1 в зоне завинчивания с возможностью регулирования положения штырями 12 со штифтами установлена рама 13, в которой расположены с возможностью перемещения вдоль оси X планки 14, в которых крепятся пластины 15 с отверстиями под патроны 11 с возможностью перемещения вдоль оси У. Карданные валы 9 состоят из двух частей, шарнирно соединенных между собой подпружиненной осью 16, и шарнирно осями крепятся к выходным валам гайковерта с одной стороны и к шпинделям 10 с другой.
Гайковерт работает следующим образом.
При включении двигателя 2 вращение от него через зубчатые передачи 3 и 4, центральную шестерню 5, зубчатые колеса 6, муфты предельного момента 7, зубчатые передачи 8, карданные валы 9 передается на шпиндели 10 с патронами 11 к собираемому узлу, в резьбовые отверстия которого наживлены шпильки.
Патроны 11 своими разрезными кулачками доориентируются относительно наживленных шпилек и захватывают их за резьбовые части.
Начинается процесс завинчивания с непрерывной доориентацией патронов относительно ввинчиваемых шпилек за счет карданных валов 9 с учетом наличия в их подвижных элементах зазоров и пружин, позволяющих изменять угол перекоса и относительное смещение осей. По мере окончания завинчивания и затяжки шпилек резко возрастают моменты сопротивления вращению в каждой из четырех кинематических ветвей, начинается проскальзывание полумуфт муфт предельного момента 7 и прекращается передача момента затяжки на шпильки. Процесс завинчивания и затяжки шпилек завершен. Отключается двигатель 2.
Процесс переналадки шпинделей на новые положения с учетом изменения межцентровых расстояний осуществляется следующим образом. Предварительно под гайковерт на специально ориентированное основание (условно не показано) устанавливается новый собираемый узел с наживленными шпильками. На раме 13 раскрепляются штыри 12 со штифтами. Штыри по пазам смещают таким образом, чтобы их штифты попали в штифтовые отверстия узла. Затем штыри 12 жестко закрепляются. В случае необходимости изменения диаметральных размеров штифтов они выворачиваются, вворачиваются новые штифты в резьбовые отверстия штырей. Раскрепляются подвижные планки 14 и пластины 15, а также вынимаются оси 16 в карданных валах 9. Планки 14 и пластины 15 перемещают таким образом, чтобы патроны 11 разрезными резьбовыми кулачками наделись на резьбовую часть наживленных шпилек (фиг.2). После совмещения патронов 11 относительно шпилек планки 14 и пластины 15 закрепляются. В случае замены патронов 11 на другие, у которых изменен наружный диаметр, заменяются пластины 15. Длину карданных валов 9 изменяют путем ввинчивания или вывинчивания валов (фиг.3), добиваясь такого положения, при котором шпиндели 10 с патронами 11, надетыми резьбовыми кулачками на наживленные шпильки, имели возможность в пределах упругой податливости валов за счет перемещения подпружиненных осей 16 свободно смещаться в плоскостях, перпендикулярных шпинделям по пазам валов в любом направлении.
В случае, если необходимо перенастроить гайковерт на завинчивание меньшего количества шпилек, любые из колес 6 выводятся из зацепления с центральной шестерней 5, а их патроны снимаются со шпинделей.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2012 |
|
RU2508978C2 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2005 |
|
RU2288834C1 |
| УСТРОЙСТВО ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК | 2006 |
|
RU2323077C2 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2007 |
|
RU2360784C2 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2007 |
|
RU2345880C1 |
| ГАЙКОВЕРТ | 2011 |
|
RU2473417C1 |
| ИНЕРЦИОННЫЙ ГАЙКОВЕРТ | 2013 |
|
RU2535835C2 |
| Многошпиндельный гайковерт для завинчивания шпилек | 1988 |
|
SU1620261A1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК С УГЛОВЫМ РАССОГЛАСОВАНИЕМ ОСЕЙ | 2006 |
|
RU2327556C2 |
| СТАНОК ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК | 2001 |
|
RU2197368C2 |
Изобретение относится к механизации технологических процессов и может быть использовано при разработке сборочных устройств для групповой сборки резьбовых деталей. Многошпиндельный гайковерт содержит корпус 1, размещенные в нем привод и несколько подвижных шпинделей 10
с инструментом 11
для захвата шпильки. Гайковерт оснащен центральной шестерней 5, кинематически связанной с приводом, муфтами 7, кинематически связанными с центральной шестерней 5 с одной стороны и со шпинделями 10
- с другой стороны, зубчатыми передачами 8, расположенными на выходных валах муфт 7, подпружиненными карданными валами 9,
шарнирно связанными со шпинделями 10
с одной стороны и с выходными валами зубчатых передач 8
с другой стороны, и рамой 13,
закрепленной в зоне завинчивания. На раме 13
установлены с возможностью поперечного перемещения планки 14.
На планках с возможностью продольного перемещения установлены пластины 15
с направляющими втулками под шпиндели 10. Технический результат заключается в возможности переналадки гайковерта на требуемые межцентровые расстояния и возможности завинчивания групповых резьбовых соединений с малыми межцентровыми расстояниями. 3 ил.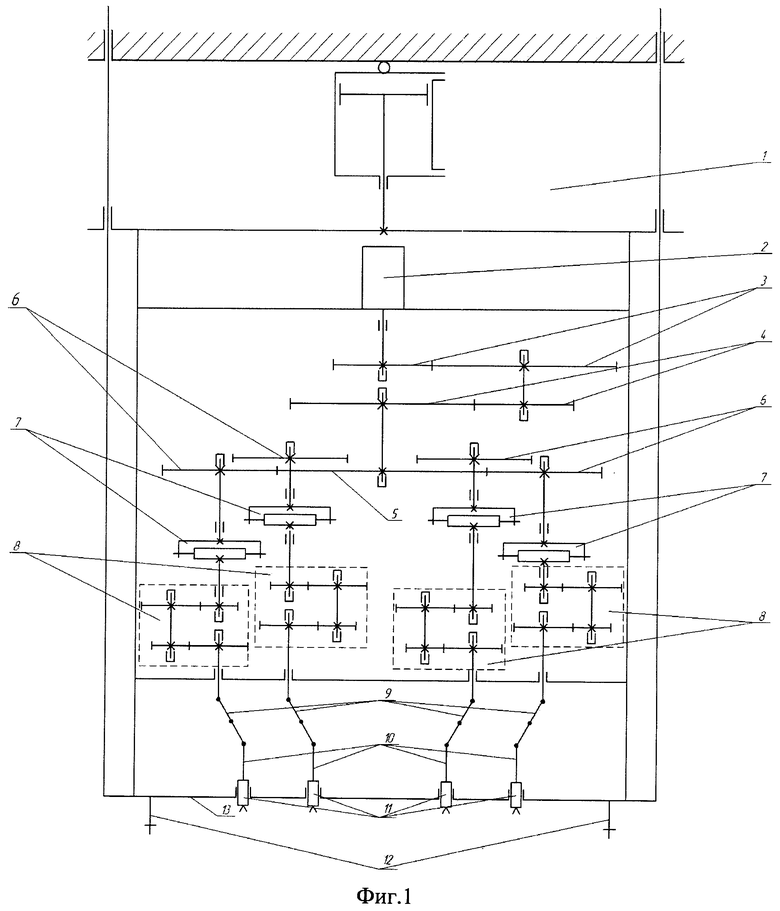
Многошпиндельный гайковерт для завинчивания шпилек с угловым рассогласованием осей, содержащий корпус, размещенные в нем привод и несколько подвижных шпинделей с инструментом для захвата шпильки, отличающийся тем, что он снабжен центральной шестерней, кинематически связанной с приводом, муфтами, кинематически связанными с центральной шестерней с одной стороны и со шпинделями - с другой стороны, зубчатыми передачами, расположенными на выходных валах муфт, подпружиненными карданными валами, шарнирно связанными со шпинделями с одной стороны и с выходными валами зубчатых передач с другой стороны, и рамой, закрепленной в зоне завинчивания, на которой установлены с возможностью поперечного перемещения планки, на которых установлены с возможностью продольного перемещения пластины с направляющими втулками под шпиндели.
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК С УГЛОВЫМ РАССОГЛАСОВАНИЕМ ОСЕЙ | 2006 |
|
RU2327556C2 |
| Инерционный гайковерт | 1986 |
|
SU1414911A1 |
| Многошпиндельный гайковерт | 1986 |
|
SU1340961A1 |
| US 0005993364 A1, 30.11.1999 | |||

