Изобретение относится к области электромеханики и может быть использовано в системах точного позиционирования для линейного и вращательного перемещения различных объектов в условиях высоких температур и радиации.
Известно устройство перемещения, включающее пьезоэлемент с опорой на одном их своих концов, элемент с фрикционной поверхностью, прижимной элемент, осуществляющий прижим опоры к фрикционной поверхности, основание, расположенную между пьезоэлементом и основанием вставку, жесткую вдоль оси перемещения и имеющую степень свободы в направлении приложения сил прижима к опоре (см. патент РФ на изобретение №2490752, кл. МПК H01L 37/00, публ. 20.08.2013).
Известно устройство, включающее основание, на котором первым концом закреплен первый пьезоэлемент, соединенный вторым концом с первым концом направляющей, сопряженной с подвижной кареткой, кронштейн, закрепленный на основании и сопряженный со вторым концом направляющей и его вариант, в котором введен второй пьезоэлемент, соединенный со вторым концом направляющей, на который подают асимметричное пилообразное напряжение, синхронизированное с асимметричным пилообразным напряжением, подаваемым на первый пьезоэлемент (см. патент РФ №2461098, кл. H01L 41/09, 10.09.2012 - прототип).
Недостатком известных технических решений является использование жестких клеевых соединений для крепления пьезоэлемента к другим элементам двигателя, что может быть неприемлемо при эксплуатации двигателя в условиях высоких температур и радиации, когда эти соединения могут стать не надежными, а также значительное усложнение конструкции двигателя в вариантах, не использующих клеевые соединения.
Целью предлагаемых технических решений является повышение стабильности и надежности работы двигателя в сложных условиях эксплуатации при высоких температурах и радиации, достижение оптимальных значений его параметров по ресурсу работы, тяговым усилиям, скорости линейного перемещения или вращения.
Указанная цель достигается тем, что в известном техническом решении (инерционный пьезоэлектрический двигатель), включающем основание, каретку, опору, прижатую к фрикционной поверхности каретки или основания, пьезоэлемент, упруго зажатый между опорой и основанием или опорой и кареткой соответственно посредством зажимающего элемента, выполненным так, что величина развиваемой им зажимающей силы превосходит величину максимальной силы трения покоя между опорой и фрикционной поверхностью и при резком уменьшении размеров пьезоэлемента обеспечивается проскальзывание опоры относительно этой поверхности, в котором согласно изобретению опора состоит из двух частей, одна из которых контактирует с зажимающим элементом, а другая с фрикционной поверхностью каретки или основания, причем между частями опоры выполнена зацепная или фрикционная связь, препятствующая их относительному смещению.
Кроме того, по крайней мере, хотя бы в одной из частей опоры выполнены выступы и/или пазы, посредством которых осуществлена зацепная связь между частями опоры.
Кроме того, фрикционная связь между частями опоры выполнена так, что максимальная сила трения покоя между ними превосходит по величине максимальную силу трения покоя между частью опоры и контактирующей с ней фрикционной поверхностью каретки или основания.
Кроме того, часть опоры, контактирующая с фрикционной поверхностью, выполнена в виде оконечного участка пьезоэлемента, противоположного участку, прижатому к основанию или каретке.
Кроме того, зажимающий элемент имеет жесткость меньшую, чем жесткость пьезоэлемента, а его предварительная деформация превышает максимальную деформацию пьезоэлемента.
Кроме того, зажимающий элемент выполнен в виде плоской пружины или упругого шарнира.
Кроме того, на одном или двух концах пьезоэлемента выполнены выступы, препятствующие смещению пьезоэлемента в боковые стороны от направления его деформации.
Кроме того, к одной из частей опоры и/или каретке или основанию прикреплены ограничители, препятствующие смещению пьезоэлемента в боковые стороны от направления его деформации.
Кроме того, противоположные концы пьезоэлемента свободно вставлены в пазы, выполненные в основании или каретке и/или одной из частей опоры.
Кроме того, часть основания или каретки, контактирующая с пьезоэлементом, выполнена в виде плоской пружины или упругого шарнира, прижимающих опору к фрикционной поверхности каретки или основания соответственно.
Кроме того, часть основания или каретки, контактирующая с пьезоэлементом и включающая плоскую пружину или упругий шарнир, прижимающих опору к фрикционной поверхности, выполнена съемной и жестко прикреплена винтами к остальной части основания или каретки соответственно.
Кроме того, все элементы двигателя выполнены из высокотемпературных и радиационно-стойких материалов.
Работа двигателя будет наиболее эффективной и надежной при жесткости зажимающего элемента значительно меньшей жесткости пьезоэлемента и при предварительной деформации зажимающего элемента, многократно превышающей максимальную рабочую деформацию пьезоэлемента (для получения необходимого значения зажимающей силы).
Принципиальные схемы вариантов предлагаемого двигателя и элементы их конструкций приведены на фиг. 1-4, где:
1 - основание;
2 - каретка;
3 - пьезоэлемент;
4 - опора;
5 - часть опоры, контактирующая с фрикционной поверхностью;
6 - часть опоры, контактирующая с зажимающим элементом;
7 - зажимающий элемент;
8 - выступ, выполненный на части опоры;
9 - паз;
10 - часть основания, выполненная в виде плоской пружины;
11 - выступы на концах пьезоэлемента;
12 - крепежные отверстия;
13 - боковые ограничители;
14 - часть основания, выполненная в виде упругого шарнира;
F - сила, прижимающая опору к фрикционной поверхности.
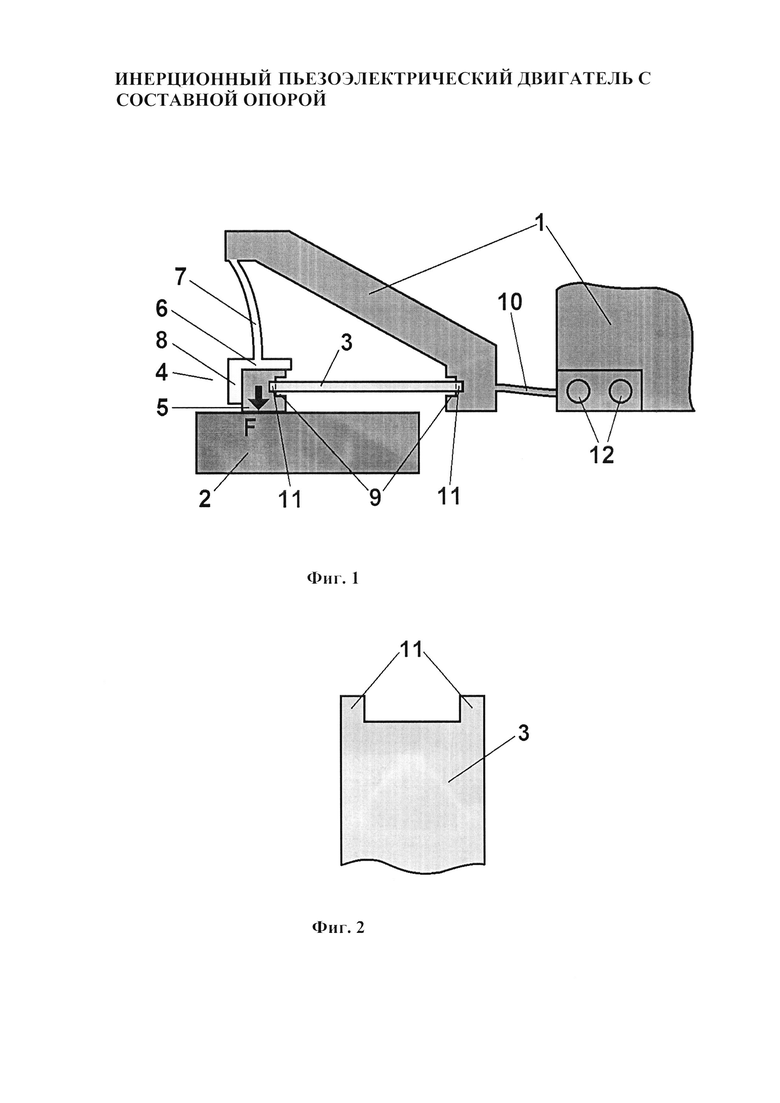
На фиг. 1 приведен вариант двигателя, состоящего из основания 1, линейно перемещающейся или вращающейся относительно основания 1 каретки 2, пьезоэлемента 3 в виде пластины, опоры 4, первая часть которой 5 контактирует с поверхностью каретки 2, а вторая часть 6 контактирует с зажимающим элементом 7, выполненным в виде плоской пружины и зажимающим пьезоэлемент 3 между опорой 4 и основанием 1. Выступ 8, выполненный на первой части опоры 6, препятствует относительному смещению частей опоры 5 и 6 при деформации пьезоэлемента 3. Концы пьезоэлемента 3 свободно вставлены в пазы 9, выполненные в основании 1 и части опоры 5 для предотвращения его изломов при зажатии. Опора 4 прижата к каретке 2 силой F посредством плоской пружины 10, выполненной в части основания 1. Выступы 11, выполненные на концах пьезоэлемента 3, препятствуют его боковому смещению относительно направления его деформации. Съемная часть основания 1 прикреплена винтами (не указаны) через крепежные отверстия 12 к остальной части основания 1 (для удобства изготовления частей двигателя и их монтажа).
Работа устройства осуществляется следующим образом.
На пьезоэлемент 3 подается асимметричное пилообразное напряжение.
Во время длинной фазы пилы пьезоэлемент 3 медленно деформируется, при этом суммарная сила, действующая на опору 4 со стороны пьезоэлемента 3 и сжимающего элемента 7, не превосходит максимальную силу трения покоя между частью опоры 5 и фрикционной поверхностью каретки 2, поэтому опора 4 и каретка 2 остаются неподвижными друг относительно друга и при этом перемещаются относительно основания 1 на расстояние, равное величине деформации пьезоэлемента.
Во время короткой фазы пилы на опору 4 со стороны пьезоэлемента 3 и зажимающего элемента 7 действует суммарная сила, превышающая максимальную силу трения покоя между частью опоры 5 и поверхностью каретки 2, а на каретку 2 действует только сила трения со стороны части опоры 5, не превышающая максимальную силу трения покоя между ними, в результате чего приобретаемое опорой 4 ускорение превышает ускорение, приобретаемое кареткой 2, и опора 4 проскальзывает относительно каретки 2, которая практически остается на месте.
При следующем пилообразном импульсе процесс перемещения повторяется.
Изменение направления перемещения достигается изменением порядка следования длинной и короткой фаз пилообразного напряжения, подаваемого на пьезоэлемент 3, или же изменением его полярности.
На фиг. 2 приведен один из концов пьезоэлемента 3 с выполненными на нем выступами 11, препятствующими смещению пьезоэлемента 3 в стороны от направления его деформации.
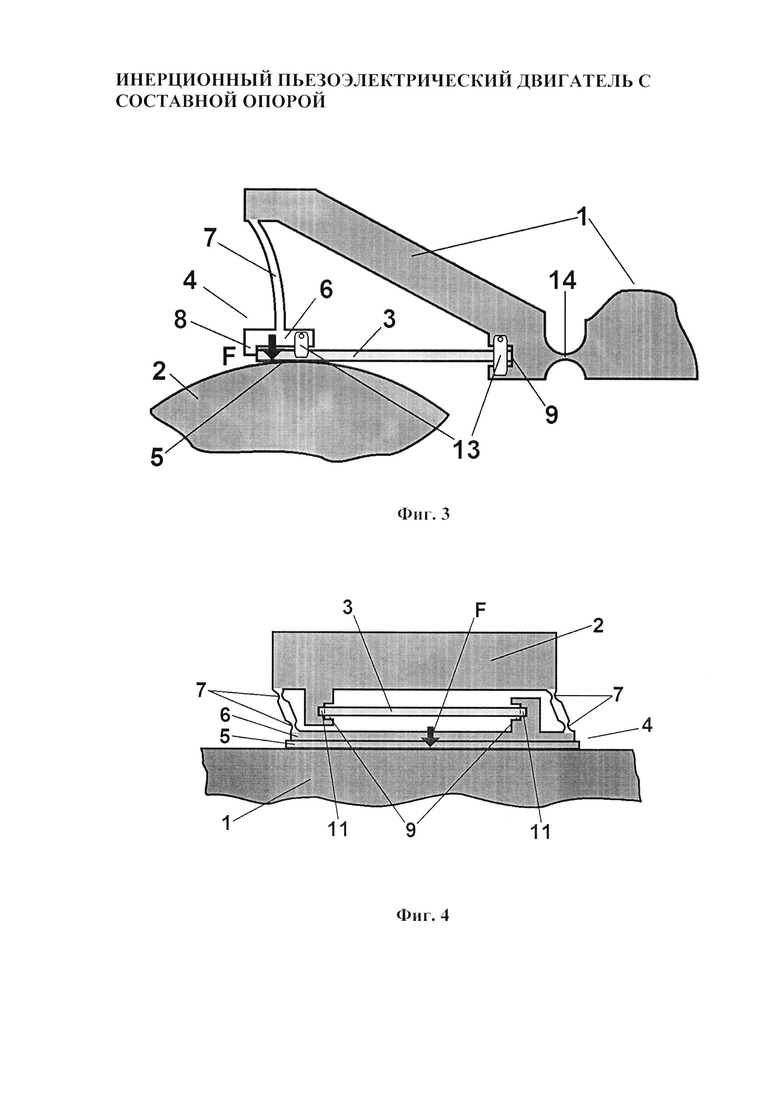
На фиг. 3 приведен вариант двигателя, в котором часть опоры 5, прижатая к каретке 2, выполнена в виде оконечной части пьезоэлемента 3. К части опоры 6 и основанию 1 прикреплены боковые ограничители 13 (например, с помощью конденсаторной микросварки), препятствующие смещению пьезоэлемента 3 в боковые стороны от направления его деформации. Опора 4 прижата к каретке 2 силой F посредством упругого шарнира 14, выполненного в части основания 1.
Перемещение каретки 2 относительно основания 1 в этом варианте двигателя осуществляется аналогично перемещению, описанному в варианте, изображенном на фиг. 1.
На фиг. 4 приведен вариант двигателя, в котором пьезоэлемент 3 в форме пластины свободно вставлен в пазы 9, выполненные в каретке 2 и части опоры 6, и зажат между ними зажимающим элементом 7, которым в данном варианте являются упругие шарниры, расположенные на концах части опоры 6 и каретки 2 и предварительно деформируемые. Опора 4 прижата к основанию 1 силой F (прижимной элемент не указан). Части опоры 5 и 6 фрикционно взаимодействуют между собой с максимальной силой трения покоя, большей, чем максимальная сила трения покоя между частью опоры 5 и основанием 1.
Таким образом, использование предлагаемого изобретения позволит создавать инерционные пьезоэлектрические двигатели, способные стабильно и надежно работать в условиях высоких температур и радиации, в которых за счет оптимального выбора трущихся пар опора - фрикционная поверхность или использования в качестве части опоры оконечного участка пьезоэлемента будут существенно улучшены эксплуатационные параметры по ресурсу работы, тяговым усилиям, скорости линейного перемещения или вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КРЕПЛЕНИЯ ПЬЕЗОЭЛЕМЕНТА В ИНЕРЦИОННОМ ПЬЕЗОЭЛЕКТРИЧЕСКОМ ДВИГАТЕЛЕ И ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2015 |
|
RU2587984C1 |
| СПОСОБ РЕАЛИЗАЦИИ ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2011 |
|
RU2457608C1 |
| ПЬЕЗОУСТРОЙСТВО ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2516258C1 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД (ВАРИАНТЫ) | 2012 |
|
RU2490752C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ УЛЬТРАЗВУКОВОЙ ДВИГАТЕЛЬ | 2009 |
|
RU2411630C1 |
| ПЬЕЗОДВИГАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2377703C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| ПЬЕЗОДВИГАТЕЛЬ | 2018 |
|
RU2686091C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2004 |
|
RU2286001C2 |
Изобретение относится к электротехнике и может быть использовано в системах точного позиционирования для линейного и вращательного перемещения различных объектов. Техническим результатом является увеличение ресурса работы и улучшение рабочих параметров в условиях высоких температур и радиации. Инерционный пьезоэлектрический двигатель включает основание, каретку, опору, прижатую к фрикционной поверхности каретки или основания, пьезоэлемент, упруго зажатый между опорой и основанием или опорой и кареткой соответственно посредством зажимающего элемента, выполненного так, что величина развиваемой им зажимающей силы превосходит величину максимальной силы трения покоя между опорой и фрикционной поверхностью. При резком уменьшении размеров пьезоэлемента обеспечивается проскальзывание опоры относительно этой поверхности. Опора состоит из двух частей, одна из которых контактирует с зажимающим элементом, а другая - с фрикционной поверхностью каретки или основания. Между частями опоры выполнена зацепная или фрикционная связь, препятствующая их относительному смещению. Часть опоры, контактирующая с фрикционной поверхностью, выполнена в виде оконечного участка пьезоэлемента. 11 з.п. ф-лы, 4 ил.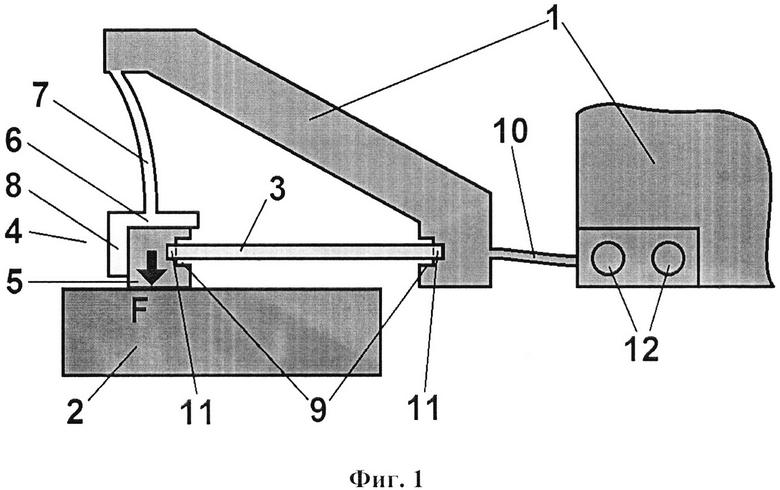
1. Инерционный пьезоэлектрический двигатель с составной опорой, включающий основание, каретку, опору, прижатую к фрикционной поверхности каретки или основания, пьезоэлемент, упруго зажатый между опорой и основанием или опорой и кареткой соответственно посредством зажимающего элемента, выполненного так, что величина развиваемой им зажимающей силы превосходит величину максимальной силы трения покоя между опорой и фрикционной поверхностью и при резком уменьшении размеров пьезоэлемента обеспечивается проскальзывание опоры относительно этой поверхности, отличающийся тем, что опора состоит из двух частей, одна из которых контактирует с зажимающим элементом, а другая с фрикционной поверхностью каретки или основания, причем между частями опоры выполнена зацепная или фрикционная связь, препятствующая их относительному смещению.
2. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что, по крайней мере, хотя бы в одной из частей опоры выполнены выступы и/или пазы, посредством которых осуществлена зацепная связь между частями опоры.
3. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что фрикционная связь между частями опоры выполнена так, что максимальная сила трения покоя между ними превосходит по величине максимальную силу трения покоя между частью опоры и контактирующую с ней фрикционной поверхностью каретки или основания.
4. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что часть опоры, контактирующая с фрикционной поверхностью каретки или основания, выполнена в виде оконечного участка пьезоэлемента, противоположного участку, прижатому к основанию или каретке.
5. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что зажимающий элемент имеет жесткость меньшую, чем жесткость пьезоэлемента, а его предварительная деформация превышает максимальную деформацию пьезоэлемента.
6. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что зажимающий элемент выполнен в виде плоской пружины или упругого шарнира.
7. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что на одном или двух концах пьезоэлемента выполнены выступы, препятствующие смещению пьезоэлемента в боковые стороны от направления его деформации.
8. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что к одной из частей опоры и/или каретке или основанию прикреплены ограничители, препятствующие смещению пьезоэлемента в боковые стороны от направления его деформации.
9. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что противоположные концы пьезоэлемента свободно вставлены в пазы, выполненные в основании или каретке и/или одной из частей опоры.
10. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что часть основания или каретки, контактирующая с пьезоэлементом, выполнена в виде плоской пружины или упругого шарнира, прижимающих опору к фрикционной поверхности каретки или основания соответственно.
11. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что часть основания или каретки, контактирующая с пьезоэлементом и включающая плоскую пружину или упругий шарнир, прижимающие опору к фрикционной поверхности, выполнена съемной и жестко прикреплена к остальной части основания или каретки соответственно.
12. Инерционный пьезоэлектрический двигатель по п. 1, отличающийся тем, что все элементы двигателя выполнены из высокотемпературных и радиационно-стойких материалов.
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД (ВАРИАНТЫ) | 2012 |
|
RU2490752C1 |
| RU 24610980 С2, 10.09.2012 | |||
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| Способ изготовления трубных плетей | 1973 |
|
SU640829A1 |

