Изобретение относится к области электромеханики и может быть использовано в системах точного позиционирования для линейного и вращательного перемещения различных объектов в прецизионном приборостроении в условиях высоких температур и радиации.
Известные способы крепления пьезоэлемента в инерционных пьезоэлектрических двигателях в основном сводятся к тому, что связь пьезоэлемента с другими элементами двигателя (опорой, основанием или кареткой) осуществляется путем их взаимной жесткой фиксации, обычно осуществляемой клеевым способом.
При этом в различных конструкциях двигателей пьезоэлемент может как фиксироваться на основании и, следовательно, оставаться неподвижным, так и фиксироваться на каретке и перемещаться вместе с ней.
В первом варианте один конец пьезоэлемента крепится к основанию, а ко второму его концу крепится опора и осуществляется прижим опоры к фрикционной поверхности перемещаемой каретки.
Во втором варианте один конец пьезоэлемента фиксируется на каретке, а к другому концу крепится опора, которую прижимают к фрикционной поверхности основания.
В обоих вариантах при подаче на пьезоэлемент асимметричного пилообразного напряжения каретка перемещается относительно основания.
Известен способ жесткого крепления пьезоэлемента, осуществленный в устройстве перемещения, включающем пьезоэлемент с опорой на одном из своих концов, элемент с фрикционной поверхностью, прижимной элемент, осуществляющий прижим опоры к фрикционной поверхности, основание, расположенную между пьезоэлементом и основанием вставку, жесткую вдоль оси перемещения и имеющую степень свободы в направлении приложения сил прижима к опоре (см. патент РФ на изобретение №2490752, кл. МПК H01L 37/00, публ. 20.08.2013).
Известен способ жесткого крепления пьезоэлемента, осуществленный в устройстве для механического перемещения объекта вдоль одной координаты, содержащем основание, пьезоэлемент, подвижную каретку, прижим (см. патент РФ №2297072, кл. H01L 37/28, H01L 41/095 публ. 10.04.2007).
Недостатком известных способов крепления пьезоэлемента является жесткая фиксация пьезоэлемента к другим элементам двигателя, осуществляемая в основном клеевым способом, что может быть не приемлемо при эксплуатации двигателя в условиях высоких температур и радиации, когда эти соединения могут стать ненадежными.
Известен способ крепления пьезоэлемента в инерционном пьезоэлектрическом двигателе, основанный на формировании функциональной связи между пьезоэлементом, основанием и направляющей (см. патент РФ №2461098, кл. H01L 41/09, 10.09.2012 - прототип), осуществленный в устройстве, включающем основание, на котором первым концом закреплен первый пьезоэлемент, соединенный вторым концом с первым концом направляющей, сопряженной с подвижной кареткой, кронштейн, закрепленный на основании и сопряженный со вторым концом направляющей.
В данном устройстве, наряду с вариантами жесткого крепления пьезоэлемента, осуществляемого клеевым способом и дополнительным преднатягом пьезоэлемента пружиной, предложен и вариант, не использующий клеевые соединения. Для этого в конструкцию двигателя введен второй пьезоэлемент, соединенный со вторым концом направляющей, на который подают асимметричное пилообразное напряжение, синхронизированное с асимметричным пилообразным напряжением, подаваемым на первый пьезоэлемент (см. патент РФ №2461098, кл. H01L 41/09, 10.09.2012 - прототип).
Недостатком известных технических решений является использование клеевых соединений для крепления пьезоэлемента к другим элементам двигателя, что может быть неприемлемо при эксплуатации двигателя в условиях высоких температур и радиации, когда эти соединения могут стать ненадежными, а также значительное усложнение конструкции двигателя в вариантах, не использующих клеевые соединения.
Целью предлагаемых технических решений является повышение стабильности и надежности работы двигателя в сложных условиях эксплуатации при высоких температурах и радиации.
Указанная цель достигается тем, что в известном способе крепления пьезоэлемента в инерционном пьезоэлектрическом двигателе, основанном на формировании функциональной связи между пьезоэлементом, основанием и кареткой двигателя, а также между пьезоэлементом и опорой, прижатой к фрикционной поверхности каретки или основания, согласно изобретению пьезоэлемент упруго зажимают соответственно между опорой и основанием или опорой и кареткой, причем величину зажимающей силы выбирают так, чтобы она превосходила величину максимальной силы трения покоя между опорой и фрикционной поверхностью и при резком уменьшении размеров пьезоэлемента обеспечивала проскальзывание опоры относительно этой поверхности.
Кроме того, части опоры и/или основания придают степень свободы перемещения в направлении действия сил прижима опоры к фрикционной поверхности.
Кроме того, пьезоэлемент изготовляют из высокотемпературной и радиационно-стойкой пьезокерамики, а остальные элементы двигателя выполняют из высокотемпературных радиационно стойких материалов.
Предлагаемый способ крепления пьезоэлемента реализован в инерционном пьезоэлектрическом двигателе, включающем основание, каретку, пьезоэлемент, опору, прижатую к фрикционной поверхности каретки или основания, в котором согласно изобретению пьезоэлемент упруго зажат между опорой и основанием или опорой и кареткой соответственно посредством зажимающего элемента, причем зажимающий элемент выполнен так, что величина развиваемой им зажимающей силы превосходит величину максимальной силы трения покоя между опорой и фрикционной поверхностью и при резком уменьшении размеров пьезоэлемента обеспечивается проскальзывание опоры относительно фрикционной поверхности.
Кроме того, зажимающий элемент выполнен в виде плоской пружины, или упругого шарнира, или спиральной пружины.
Кроме того, зажимающий элемент имеет жесткость меньшую, чем жесткость пьезоэлемента, а его предварительная деформация превышает максимальную деформацию пьезоэлемента.
Кроме того, противоположные концы пьезоэлемента свободно вставлены в пазы, выполненные в опоре и в основании или каретке.
Кроме того, часть основания и/или опоры, с которой контактирует пьезоэлемент, выполнена так, что опора имеет степень свободы перемещения в направлении действия сил прижима опоры к фрикционной поверхности.
Кроме того, часть основания и/или опоры, контактирующая с пьезоэлементом, выполнена в виде плоской пружины или упругого шарнира.
Кроме того, пьезоэлемент выполнен из высокотемпературной и радиационно стойкой пьезокерамики, а другие элементы двигателя выполнены из высокотемпературных радиационно стойких материалов
Превышение величины зажимающей силы, развиваемой зажимающим элементом, над величиной максимальной силы трения покоя между опорой и основанием или опорой и кареткой является необходимым, но не достаточным условием работы двигателя. Необходимо также соблюсти соотношения между величиной максимальной деформации пьезоэлемента и величиной максимального смещения между фрикционными парами при трении покоя, между массой каретки и массой опоры (оптимально значительное превышение первой над второй) и т.д., что, в общем, требуется и при работе инерционных двигателей и с жесткой фиксацией пьезоэлемента.
Работа двигателя будет наиболее эффективной и надежной при жесткости зажимающего элемента значительно меньшей жесткости пьезоэлемента (в этом случае упругий зажим пьезоэлемента не скажется на величине его рабочих деформаций) и при предварительной деформации зажимающего элемента, многократно превышающей максимальную рабочую деформацию пьезоэлемента (для получения необходимого значения зажимающей силы).
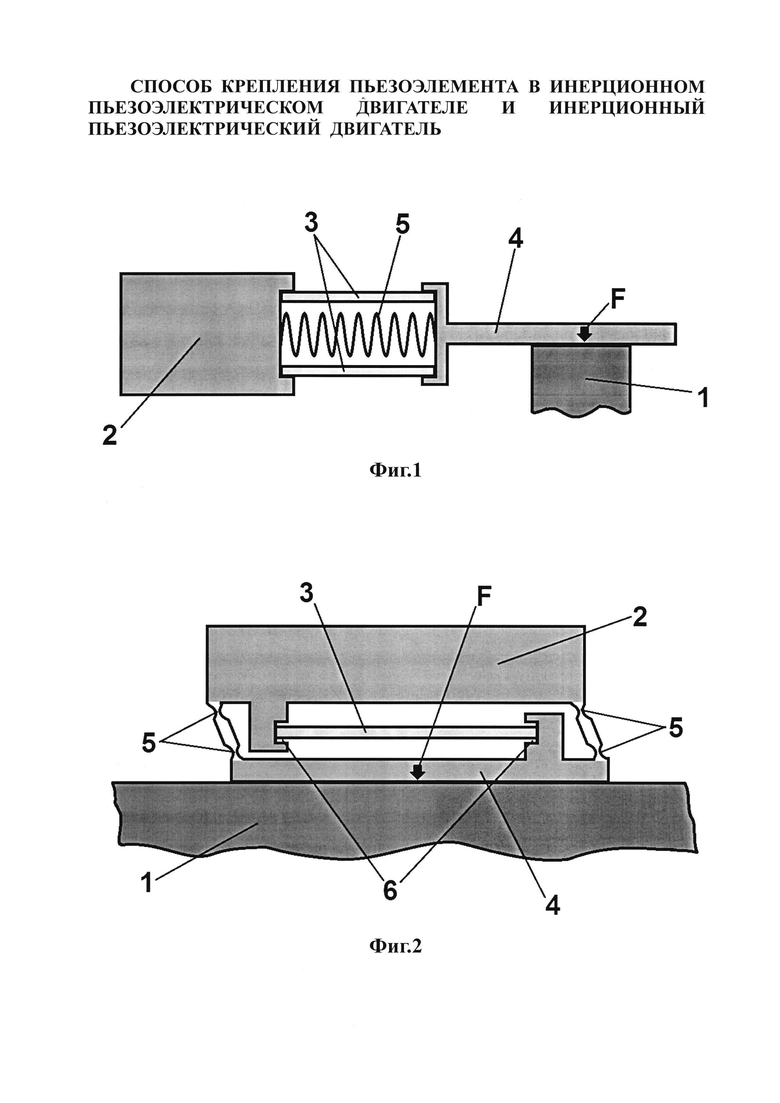
Принципиальные схемы вариантов предлагаемого двигателя, работающего на заявляемом способе, приведены на фиг. 1-4, где:
1 - основание;
2 - каретка;
3 - пьезоэлемент;
4 - опора;
5 - зажимающий элемент;
6 - паз;
7 - элемент основания в виде плоской пружины;
8 - элемент опоры в виде упругого шарнира;
F - сила, прижимающая опору к фрикционной поверхности.
На фиг. 1 приведен вариант двигателя, состоящего из основания 1, каретки 2, пьезоэлемента 3 в форме полого цилиндра, опоры 4, прижатой к поверхности основания 1 силой F (прижимной элемент не указан). Каретка 2 и опора 4 расположены на противоположных концах пьезоэлемента 3, который упруго зажат между ними зажимающим элементом 5 в виде спиральной пружины, расположенной внутри цилиндрической полости пьезоэлемента 3 и прикрепленной к каретке 2 и опоре 4.
Работа устройства осуществляется следующим образом.
На пьезоэлемент 3 подается асимметричное пилообразное напряжение.
Во время длинной фазы пилы напряжение на пьезоэлементе медленно возрастает и он медленно сокращается. При этом на каретку 2 и опору 4 со стороны сжимающего элемента 5 и пьезоэлемента 3 действуют силы, суммарно не превышающие максимальную силу трения покоя между опорой 4 и основанием 5. В результате чего каретка 2 смещается вправо на величину деформации пьезоэлемента 5, а опора 4, на которую, кроме указанных сил, действует и сила трения покоя со стороны основания 4, остается на месте.
Во время короткой фазы пилы пьезоэлемент резко возвращается в исходное состояние, на каретку 2 и опору 4 со стороны сжимающего элемента 5 и пьезоэлемента 3 действуют силы, суммарно превышающие максимальную силу трения покоя между опорой 4 и основанием 5. При этом каретка 2, благодаря своей инертной массе, практически остается на месте, а опора 4 проскальзывает относительно основания 1 вправо.
При следующем пилообразном импульсе процесс перемещения вправо повторяется.
Если поменять порядок следования длинных и коротких фаз пилообразного напряжения, то во время короткой фазы напряжение на пьезоэлементе резко возрастает, и он резко сжимается. На каретку 2 и опору 4 со стороны стягивающего элемента 5 и пьезоэлемента 3 действуют силы, суммарно превышающие максимальную силу трения покоя между опорой 4 и основанием 5, при этом каретка 2, благодаря своей инертной массе, практически остается на месте, а опора 4 проскальзывает относительно основания 1 влево.
Во время длинной фазы пилы пьезоэлемент медленно возвращается в исходное состояние, действующие суммарные силы на каретку 2 и опору 4 со стороны сжимающего элемента 5 и пьезоэлемента 3 не превышают максимальной силы трения покоя между опорой 4 и основанием 1. В результате чего каретка 2 смещается влево на величину деформации пьезоэлемента 5, а опора 4, на которую, кроме указанных сил, действует и сила трения со стороны основания 4, остается на месте.
При следующем пилообразном импульсе процесс перемещения влево повторяется.
Изменение направления перемещения можно также достичь и изменением полярности подаваемого на пьезоэлемент 3 напряжения.
На фиг. 2 приведен вариант двигателя, в котором пьезоэлемент 3 в форме пластины свободно вставлен в пазы 6 каретки 2 и опоры 4 и зажат между ними стягивающим элементом 5, которым в данном варианте являются упругие шарниры, расположенные на концах опоры 4 и предварительно деформируемые. Опора 4 прижата к поверхности основания 1 силой F (прижимной элемент не указан).
Концы пьезоэлемента 3 свободно вставлены в пазы 6 для предотвращения возможных изломов пьезоэлемента 3 при его зажатии.
В этом варианте пьезоэлемент 3 вместе с кареткой 2 перемещаются относительно основания 1 и работа двигателя аналогична работе, описанной в предыдущем варианте.
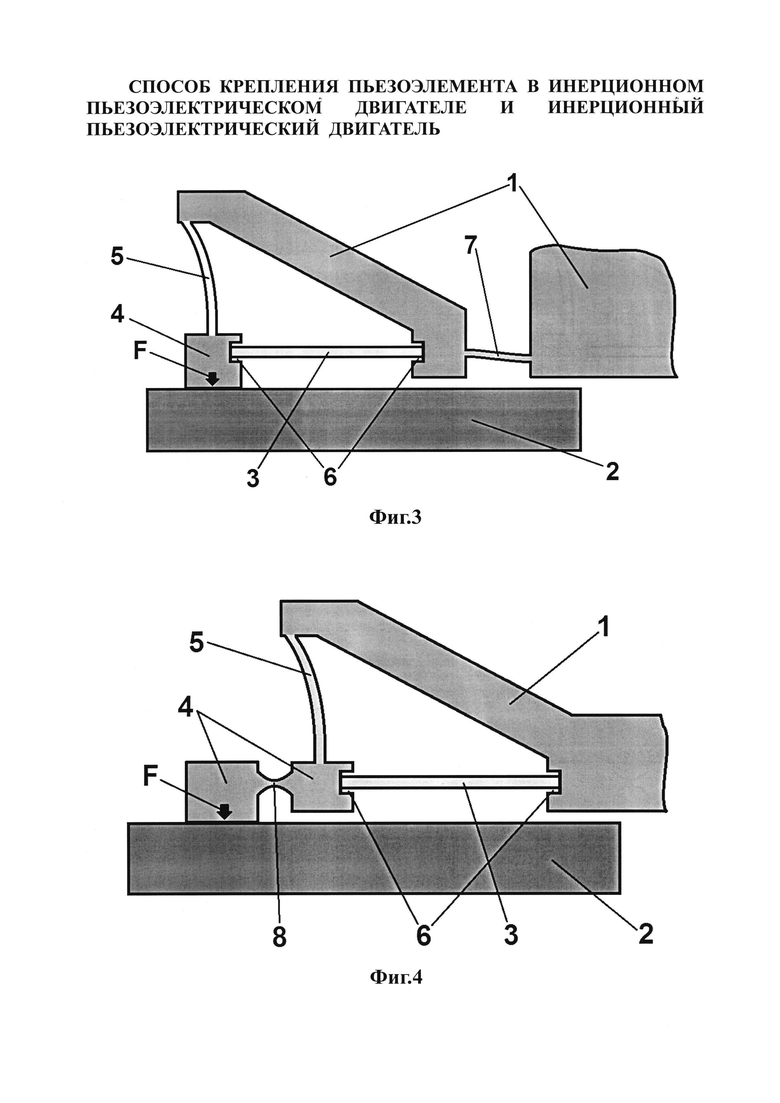
На фиг. 3 приведен вариант двигателя, в котором, для обеспечения лучшей стабильности фрикционного контакта между кареткой 2, перемещающейся по направляющим (не указаны), и прижатой к ней опорой 4, часть основания 1, контактирующая с пьезоэлементом 3, выполнена виде плоской пружины 7, деформирующейся в направлении сил прижима опоры 4 к поверхности каретки 2 и жесткой в направлении перемещения каретки 2. Пьезоэлемент 3 в форме пластины зажат между опорой 4 и основанием 1 зажимающим элементом 5 в виде плоской пружины. В данном варианте небольшие отклонения от плоскостности перемещения каретки 2 относительно основания 1 не сказываются на тяговых характеристиках двигателя, при этом часть основания 1, выполненная в виде плоской пружины 7, осуществляет одновременно и прижим опоры 4 к поверхности каретки 2 силой F.
Перемещение каретки 2 относительно основания 1 осуществляется следующим образом:
Во время длинной фазы пилы пьезоэлемент 3 медленно деформируется, при этом суммарная сила, действующая на опору 4 со стороны пьезоэлемента 3 и сжимающего элемента 5, не превосходит максимальную силу трения покоя между опорой 4 и фрикционной поверхностью каретки 2, поэтому опора 4 и каретка 2 остаются неподвижными друг относительно друга и при этом перемещаются относительно основания 1 на расстояние, равное величине деформации пьезоэлемента.
Во время короткой фазы пилы на опору 4 со стороны пьезоэлемента 3 и зажимающего элемента 5 действует суммарная сила, превышающая максимальную силу трения покоя между опорой 4 и поверхностью каретки 2, а на каретку 2 действует только сила трения со стороны опоры 4, не превышающая максимальную силу трения покоя между ними, в результате чего приобретаемое опорой 4 ускорение превышает ускорение, приобретаемое кареткой 2, и опора 4 проскальзывает относительно каретки 2, которая практически остается на месте.
На фиг. 4 приведен вариант двигателя, в котором для обеспечения лучшей стабильности фрикционного контакта между кареткой 2 и прижатой к ней опорой 4 часть опоры 4, контактирующая с пьезоэлементом 3, выполнена в виде упругого шарнира 8, деформирующегося в направлении сил прижима опоры 4 к поверхности каретки 2 и жесткого в направлении перемещения каретки 2. Пьезоэлемент 3 в форме пластины зажат между опорой 4 и основанием 1 зажимающим элементом 5 в виде плоской пружины. В данном варианте небольшие отклонения от плоскостности перемещения каретки 2 относительно основания 1 не сказываются на тяговых характеристиках двигателя, при этом часть опоры 4, выполненная в виде упругого шарнира 8, осуществляет одновременно и прижим опоры 4 к поверхности каретки 2 силой F.
Перемещение каретки 2 относительно основания 1 осуществляется аналогично перемещению, описанному в предыдущем варианте.
Созданные авторами образцы инерционных пьезоэлектрических двигателей с упруго зажатыми между основанием и опорой или между кареткой и опорой пьезоэлементами имеют характеристики, не уступающие приводам с жесткими креплениями пьезоэлементов, и при этом способны работать в экстремальных условиях высоких температур и радиации.
Таким образом, использование предлагаемого изобретения позволит создавать инерционные пьезоэлектрические двигатели без жесткой фиксации используемых в них пьезоэлементов, что существенно расширит область эксплуатации подобных двигателей, в частности, позволит их использовать в условиях высоких температур и радиации, а также повысит надежность и стабильность их работы, не предъявляя при этом высоких требований к плоскостности используемых направляющих.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ С СОСТАВНОЙ ОПОРОЙ | 2016 |
|
RU2635341C2 |
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД (ВАРИАНТЫ) | 2012 |
|
RU2490752C1 |
| ПЬЕЗОУСТРОЙСТВО ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ | 2012 |
|
RU2516258C1 |
| СПОСОБ РЕАЛИЗАЦИИ ПОШАГОВОГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2011 |
|
RU2457608C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ УЛЬТРАЗВУКОВОЙ ДВИГАТЕЛЬ | 2009 |
|
RU2411630C1 |
| ПЬЕЗОДВИГАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2377703C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2004 |
|
RU2286001C2 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
Изобретение относится к электротехнике и может быть использовано в системах точного позиционирования для линейного и вращательного перемещения различных объектов. Техническим результатом является повышение стабильности и надежности работы в условиях высоких температур и радиации. В способе крепления пьезоэлемента в инерционном пьезоэлектрическом двигателе, основанном на формировании функциональной связи между пьезоэлементом, основанием и кареткой двигателя, а также между пьезоэлементом и опорой, прижатой к фрикционной поверхности каретки или основания, пьезоэлемент упруго зажимают соответственно между опорой и основанием или опорой и кареткой. Величину зажимающей силы выбирают так, чтобы она превосходила величину максимальной силы трения покоя между опорой и фрикционной поверхностью и при резком уменьшении размеров пьезоэлемента обеспечивала проскальзывание опоры относительно этой поверхности. Части опоры и/или основания придают степень свободы перемещения в направлении действия сил прижима опоры к фрикционной поверхности. Развивающий зажимающую силу элемент имеет жесткость меньшую, чем жесткость пьезоэлемента, а деформацию, превышающую максимальную рабочую деформацию пьезоэлемента, и выполнен в виде плоской пружины, или упругого шарнира, или спиральной пружины. Все элементы двигателя выполнены из высокотемпературных, радиационно стойких материалов. 2 н. и 8 з.п. ф-лы, 4 ил.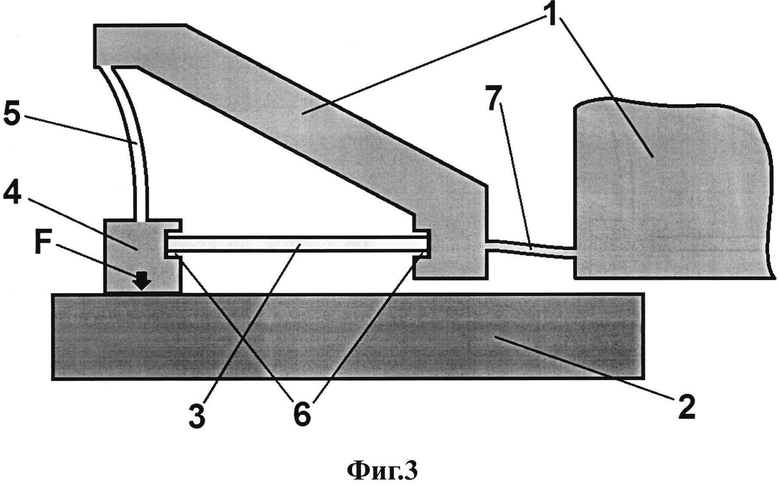
1. Способ крепления пьезоэлемента в инерционном пьезоэлектрическом двигателе, основанный на формировании функциональной связи между пьезоэлементом, основанием и кареткой двигателя, а также между пьезоэлементом и опорой, прижатой к фрикционной поверхности каретки или основания, отличающийся тем, что пьезоэлемент упруго зажимают соответственно между опорой и основанием или опорой и кареткой, причем величину зажимающей силы выбирают так, чтобы она превосходила величину максимальной силы трения покоя между опорой и фрикционной поверхностью и при резком уменьшении размеров пьезоэлемента обеспечивала проскальзывание опоры относительно этой поверхности.
2. Способ по п. 1, отличающийся тем, что части опоры и/или основания придают степень свободы перемещения в направлении действия сил прижима опоры к фрикционной поверхности.
3. Способ по п. 1, отличающийся тем, что пьезоэлемент изготовляют из высокотемпературной и радиационно стойкой пьезокерамики, а другие элементы двигателя выполняют из высокотемпературных радиационно стойких материалов.
4. Инерционный пьезоэлектрический двигатель, включающий основание, каретку, пьезоэлемент, опору, прижатую к фрикционной поверхности каретки или основания, отличающийся тем, что пьезоэлемент упруго зажат между опорой и основанием или опорой и кареткой соответственно посредством зажимающего элемента, причем зажимающий элемент выполнен так, что величина развиваемой им зажимающей силы превосходит величину максимальной силы трения покоя между опорой и фрикционной поверхностью и при резком уменьшении размеров пьезоэлемента обеспечивается проскальзывание опоры относительно этой поверхности.
5. Инерционный пьезоэлектрический двигатель по п. 4, отличающийся тем, что зажимающий элемент выполнен в виде плоской пружины, или упругого шарнира, или спиральной пружины.
6. Инерционный пьезоэлектрический двигатель по п. 4, отличающийся тем, что зажимающий элемент имеет жесткость меньшую, чем жесткость пьезоэлемента, а его предварительная деформация превышает максимальную деформацию пьезоэлемента.
7. Инерционный пьезоэлектрический двигатель по п. 4, отличающийся тем, что противоположные концы пьезоэлемента свободно вставлены в пазы, выполненные в опоре и в основании или каретке.
8. Инерционный пьезоэлектрический двигатель по п. 4, отличающийся тем, что часть основания и/или опоры, с которой контактирует пьезоэлемент, выполнена так, что опора имеет степень свободы перемещения в направлении действия сил прижима опоры к фрикционной поверхности.
9. Инерционный пьезоэлектрический двигатель по п. 4, отличающийся тем, что часть основания и/или опоры, контактирующая с пьезоэлементом, выполнена в виде плоской пружины или упругого шарнира.
10. Инерционный пьезоэлектрический двигатель по п. 4 отличающийся тем, что пьезоэлемент выполнен из высокотемпературной и радиационно стойкой пьезокерамики, а другие элементы двигателя выполнены из высокотемпературных радиационно стойких материалов.
| ИНЕРЦИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД (ВАРИАНТЫ) | 2012 |
|
RU2490752C1 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2461098C2 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| Трубопровод с двойными стенками | 1979 |
|
SU823738A1 |
| US 5157256 A, 20.10.1992. | |||

