Уровень техники
Настоящее изобретение относится к морской прибрежной сейсморазведке и, в частности, к системам и способам управления распределением буксируемых сейсмических кос.
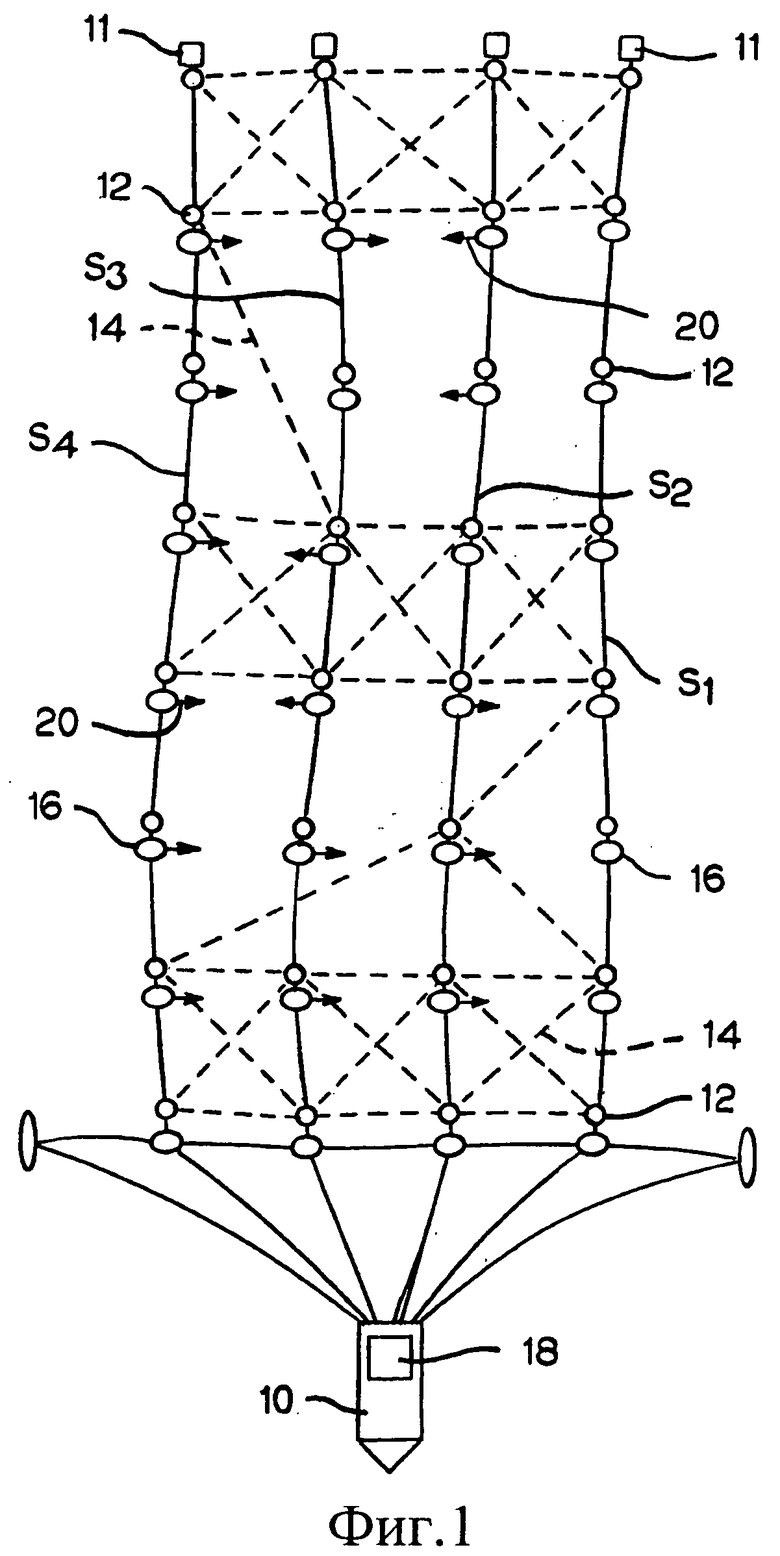
При поиске углеводородных месторождений под морским дном исследовательское судно 10, как показано на фиг.1, буксирует один или более сейсмических источников (не показаны на чертеже) и один или более кабелей сейсмических кос S1-S4, оснащенных гидрофонами и другими датчиками. В системах с несколькими сейсмическими косами сейсмические косы буксируют под водой позади исследовательского судна практически параллельно друг другу. Хвостовое окончание каждой сейсмической косы привязывают к хвостовому бую 11, который отмечает ее положение. Сейсмический источник периодически испускает сейсмическую волну, которая распространяется в морском дне и отражается геологическими образованиями. Отраженные сейсмические волны принимают гидрофонами на сейсмических косах. Данные гидрофонов собирают и впоследствии обрабатывают для получения карты земной коры в зоне исследований.
Качество исследований зависит, помимо прочего, от знания точного положения каждого гидрофона. Датчики положения, такие как датчики курса или акустические дальномеры 12, расположенные вдоль длин сейсмических кос, применяют для определения форм сейсмических кос и относительных расстояний между ними. Акустические дальномеры обычно являются акустическими приемопередатчиками, работающими в диапазоне каналов, по которым они передают друг другу и принимают друг от друга акустические сигналы измерения дальности для получения точных расстояний 14 между их положениями на сейсмических косах. Множество расстояний (из них только некоторые показаны на фиг.1), а также данные о курсе сейсмических кос, полученные от множества датчиков курса, используют для вычисления сетевого решения, определяющего формы индивидуальных сейсмических кос и их относительные положения. Если какая-либо точка массива сейсмических кос привязана к геодезическому ориентиру, предоставляемому, например, GPS-приемником, то может быть определено абсолютное положение каждого гидрофона.
Устройства позиционирования, такие как регуляторы глубины погружения косы и устройства 16 рулевого управления в поперечном направлении, расположенные в узлах вдоль длин сейсмических кос, используют для управления глубиной сейсмических кос и расстоянием между ними. Устройства позиционирования могут оснащаться акустическими дальномерами для измерения расстояний до других аналогично оснащенных устройств позиционирования, а также до выделенных акустических дальномеров. Точное позиционирование сейсмических кос важно в течение проходов с линейной расстановкой точек наблюдения для получения высококачественных карт. Однако поперечные течения вызывают отклонение сейсмических кос от прямых линий, параллельных курсу буксирующего судна. Сейсмические косы могут выходить под углом из точек буксирования или принимать изогнутую форму, при которой их хвостовые окончания отклоняются от упомянутых прямых линий. Такое кулисообразное расположение сейсмоприемников, как правило, нежелательно при проходах с линейной расстановкой точек наблюдения. Точное позиционирование также важно при поворотах между проходами с линейной расстановкой точек наблюдения для уменьшения времени поворота без запутывания сейсмических кос.
В существующих системах позиционирования сейсмических кос одну из сейсмических кос, в данном примере крайнюю по левому борту сейсмическую косу S1, используют в качестве опорной сейсмической косы. Судовой контроллер 18 собирает данные от датчиков положения и вычисляет сетевое решение, представляющее формы сейсмических кос и расстояния между ними. Из этого сетевого решения и целевых расстояний между соответствующими узлами устройства рулевого управления на сейсмических косах, которые прямо или косвенно соотносятся с точками на опорной сейсмической косе, судовой контроллер производит команды рулевого управления для каждого устройства рулевого управления в поперечном направлении. Команды рулевого управления передают в устройства рулевого управления для регулировки их управляющих плоскостей, или килей, для управления положением сейсмических кос в поперечном направлении, как показано стрелками 20, для поддержания упомянутых целевых расстояний.
В существующих системах оператор управляет опорной сейсмической косой путем передачи команд рулевого управления в поперечном направлении контроллерам положения в поперечном направлении для управления положением опорной сейсмической косы для подстройки отклонения от курса. Затем остальные сейсмические косы автоматически перемещаются для достижения выбранных расстояний прямо или косвенно от опорной сейсмической косы. Однако ручное позиционирование опорной косы требует много времени и при поворотах может происходить слишком резко.
Сущность изобретения
Этот и другие недостатки могут быть преодолены с помощью способа позиционирования одной или более сейсмических кос позади исследовательского судна, который реализует технические признаки настоящего изобретения. Способ включает буксирование первой действительной сейсмической косы, оснащенной устройствами рулевого управления в поперечном направлении, расположенными в разнесенных положениях вдоль длины сейсмической косы; задание мнимой сейсмической косы, имеющей определенную форму и положение позади исследовательского судна; определение формы и положения первой действительной сейсмической косы; задание целевого расстояния в поперечном направлении между мнимой сейсмической косой и первой действительной сейсмической косой; и передачу команд рулевого управления в поперечном направлении в устройства рулевого управления в поперечном направлении для управления положением первой действительной сейсмической косы для достижения целевого расстояния в поперечном направлении от мнимой сейсмической косы.
В другом аспекте настоящего изобретения предлагается система для управления распределением множества сейсмических кос, буксируемых позади исследовательского судна. Система включает множество действительных кос, головные окончания которых смещены друг от друга в поперечном направлении. Каждая действительная сейсмическая коса имеет множество устройств рулевого управления в поперечном направлении и датчиков положения, размещенных вдоль ее длины. Контроллер принимает данные о положении от датчиков положения. Контроллер включает средства автоматического рулевого управления, которые вычисляют форму и положение мнимой сейсмической косы, буксируемой исследовательским судном. Контроллер также включает сетевые вычислительные средства, определяющие формы и положения действительных сейсмических кос исходя из данных о положении, а также вычисляет расстояния в поперечном направлении для каждой действительной сейсмической косы относительно формы и положения мнимой сейсмической косы, принятых от средств автоматического рулевого управления. Контроллер затем передает команды рулевого управления в поперечном направлении в устройства рулевого управления в поперечном направлении в соответствии с вычисленными расстояниями в поперечном направлении.
В другом аспекте настоящего изобретения способ управления распределением N действительных сейсмических кос Sl-SN включает: задание формы и положения мнимой сейсмической косы Gr; определение форм и положений действительных сейсмических кос Sl-SN; регулировку упомянутого расстояния действительной опорной сейсмической косы Sr от мнимой сейсмической косы Gr; и регулировку расстояния между действительной сейсмической косой Sn и другой действительной сейсмической косой Si для n∈{1, 2,…, N}, где n≠r, и i ∈{1, 2, …, N}, i≠n, при этом по меньшей мере в одном случае i=r.
Краткое описание чертежей
Признаки и аспекты настоящего изобретения, а также его преимущества будут понятны из последующего описания, приложенной формулы изобретения и сопровождающих чертежей.
На фиг.1 представлен вид сверху исследовательского судна, буксирующего сеть сейсмических кос, иллюстрирующий обычную акустическую крестовую связь и рулевое управление в поперечном направлении сейсмическими косами с использованием опорной сейсмической косы.
На фиг.2 представлен вид сверху, аналогичный показанному на фиг.1, иллюстрирующий использование виртуальной сейсмической косы, которая служит эталоном опорной косы в соответствии с настоящим изобретением.
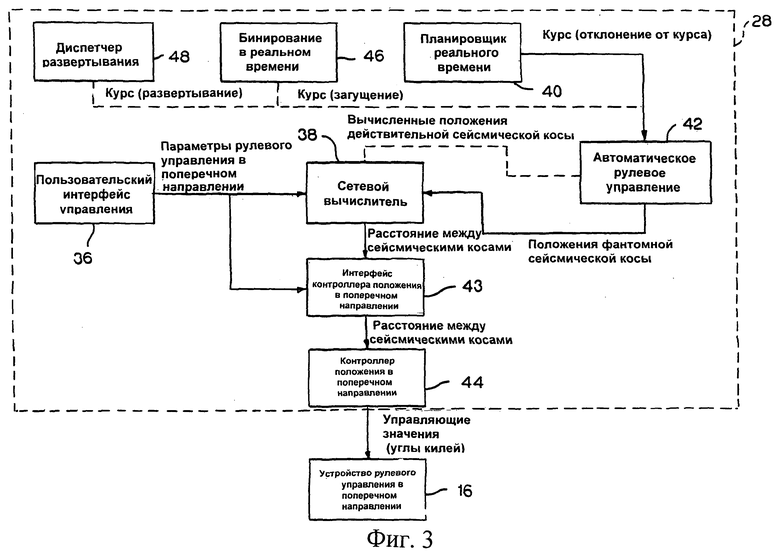
На фиг.3 представлена структурная схема системы управления позиционированием сейсмических кос, применимой для сети сейсмических кос, показанной на фиг.2.
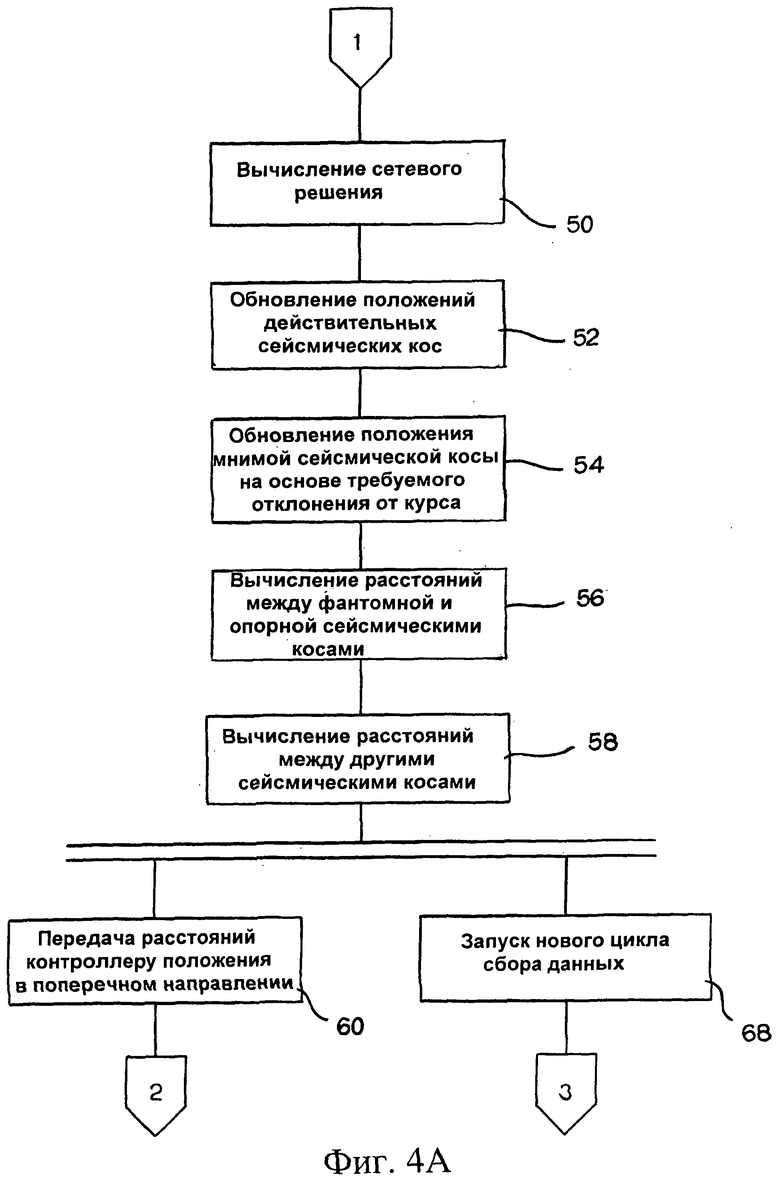
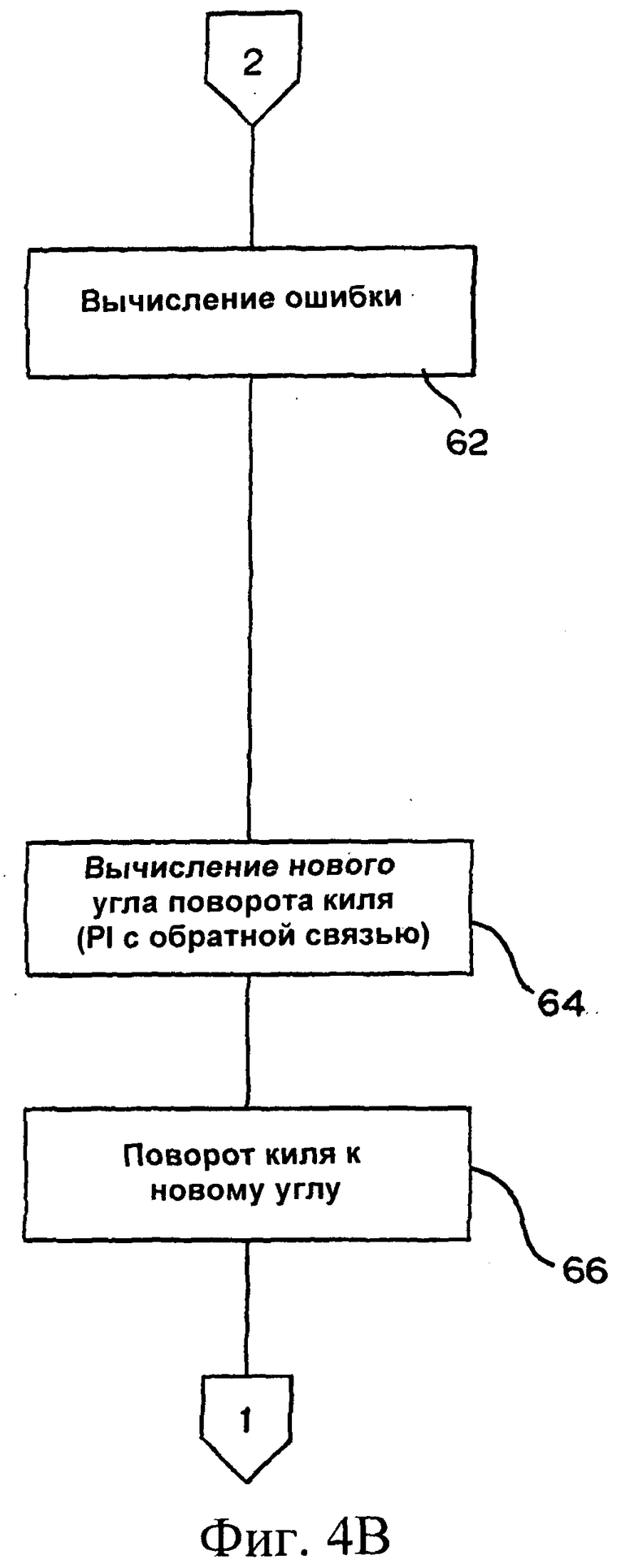
На фиг.4А-4С представлены блок-схемы управляющей последовательности для системы управления, показанной на фиг.3.
Подробное описание изобретения
Функционирование системы рулевого управления сейсмическими косами в соответствии с настоящим изобретением описано на примере системы с четырьмя сейсмическими косами, показанной на фиг.2. (Схема расположения сейсмических кос такая же, как на фиг.1). Исследовательское судно 10 буксирует четыре сейсмические косы S1-S4 (в общем случае, Sl-SN для системы с N сейсмическими косами), хвостовые окончания 22 которых привязаны к хвостовым буям 11. Головные окончания 23 сейсмических кос соединены с системой 24 буксировочных канатов и тросов, закрепленных на задней палубе судна. Параваны 26 используют для поддержания широкого распределения развернутой сети сейсмических кос. Устройства 16 рулевого управления в поперечном направлении, размещенные в разнесенных положениях или узлах рулевого управления, например, через каждые 300 м вдоль длины каждой сейсмической косы, прикладывают поперечные силы 20 для перемещения сейсмической косы в сторону правого или левого борта судна. Судовой контроллер 28, связанный с датчиками положения, устройствами рулевого управления в поперечном направлении и сейсмическими косами с помощью линии связи, например проводной линии 30, проложенной вдоль буксировочных канатов и через сейсмические косы, принимает данные позиционирования и другие данные от датчиков положения, а также передает по упомянутой линии связи команды рулевого управления в устройства рулевого управления в поперечном направлении.
Как и в случае системы сейсмических кос, показанной на фиг.1, система, показанная на фиг.2, назначает одну сейсмическую косу, в данном примере крайнюю по правому борту сейсмическую косу S1, в качестве опорной сейсмической косы Sr. Ближайшей соседней сейсмической косой S2 управляют для достижения выбранного расстояния D от опорной сейсмической косы S1. В соответствии с фиг.2, узел для головного устройства 16А рулевого управления в поперечном направлении, расположенного на сейсмической косе S2, находится дальше наименьшего расстояния с опорной сейсмической косой S1, чем выбранное расстояние. Следовательно, судовой контроллер выдает команду рулевого управления головному устройству 16А рулевого управления в поперечном направлении для перемещения сейсмической косы в сторону левого борта судна, что обозначено стрелкой 32. Так как хвостовой узел рулевого управления для устройства 16 В рулевого управления в поперечном направлении, расположенного на сейсмической косе S2, находится ближе к расстоянию наибольшего приближения к опорной сейсмической косе S1, чем выбранное расстояние, как показано на фиг.2, судовой контроллер выдает команду рулевого управления хвостовому устройству 16 В рулевого управления в поперечном направлении на сейсмической косе S2, для смещения ее в сторону правого борта судна, что обозначено стрелкой 33. Команды рулевого управления содержат, например, управляющие значения, такие как значения углов поворота килей, которые связаны с ошибкой расстояния, вычисленной из требуемого целевого расстояния и фактического расстояния между узлом на сейсмической косе, в котором расположено данное устройство рулевого управления в поперечном направлении, и ближайшей точкой на сейсмической косе, которая служит эталоном. Длина стрелок 32, 33 пропорциональна амплитуде изменений установок углов поворота килей, которые управляют азимутом управляющих поверхностей каждого устройства рулевого управления в поперечном направлении. Поскольку средние части сейсмических кос S1 и S2 находятся на требуемом расстоянии D, как показано на фиг.2, установка углов килей для устройства 16С рулевого управления в поперечном направлении не требует изменения.
Аналогично тому, как сейсмической косой S2 управляют относительно формы и положения опорной сейсмической косы S1, сейсмической косой S3, соседней по правому борту для S2, управляют относительно положения и формы сейсмической косы S2. А крайнюю по правому борту судна сейсмическую косу S4 позиционируют относительно S3. Такой режим работы является предпочтительным, так как расстояния между близко расположенными, соседними, сейсмическими косами, полученные от акустических дальномеров, как правило, более точные, чем расстояния между расположенными далеко друг от друга, несмежными, сейсмическими косами. В данном примере всеми сейсмическими косами S2-S4 управляют для поддержания требуемого расстояния от соседней сейсмической косы по левому борту судна. Опорная сейсмическая коса S1, таким образом, служит прямым эталоном для сейсмической косы S2 и непрямым эталоном для остальных сейсмических кос.
В одном из известных вариантов системы рулевого управления опорной сейсмической косой управляет оператор, вручную задавая команды посредством судового контроллера для регулировки отклонения от эталонного курса, что заставляет сейсмическую косу принять соответствующую форму и положение. В соответствии с настоящим изобретением позиционирование опорной сейсмической косы автоматизировано посредством использования для нее заранее заданной мнимой сейсмической косы Gr в качестве эталона. Эту мнимую, или виртуальную, или фантомную, сейсмическую косу задают посредством судового контроллера в соответствии с выбираемыми критериями, например целевым отклонением от курса. После выбора критериев судовой контроллер автоматически управляет опорной сейсмической косой Sr для достижения заранее выбранного расстояния, которое может быть нулевым, от фантомной сейсмической косы Gr (на фиг.2 r=1). Другими сейсмическими косами S2-S4 управляют стандартным образом в соответствии с предыдущим описанием. Как показано на фиг.2, фантомную косу G1 выбирают так, что ее головное окончание 23' совпадает с точкой 34 буксирования опорной косы S1. В этом примере показана коса G1, которая также имеет определенное отклонение F от курса. (Однако в альтернативном варианте коса G1 может быть выбрана как развертываемая прямо за судном или смещенная от точки буксирования косы S1.)
Обычно для системы с N действительными сейсмическими косами S1-SN одну из сейсмических кос назначают опорной сейсмической косой Sr. В предпочтительном варианте r=1 или N для назначения крайней сейсмической косы по левому или правому борту, S1 или SN, в качестве опорной для сейсмических кос, последовательно расположенных по направлению от левого к правому борту S1-SN. Тогда соответствующими фантомными сейсмическими косами являются G1 или GN. Если опорная фантомная сейсмическая коса Gr=G1, то коса G1 является эталоном для действительной сейсмической косы S1, а коса Sn-1 является эталоном для косы Sn для n∈{2,3,N}. В более общем случае, если фантомная сейсмическая коса Gr является эталоном для опорной сейсмической косы Sr, то другая действительная сейсмическая коса Si будет эталоном для действительной сейсмической косы Sn для n∈{1,2, N}, n ≠ r, и i∈ {1,2,.... N}, i ≠ n, при этом по меньшей мере в одном случае i=r.
Структурная схема системы рулевого управления сейсмическими косами показана на фиг.3. Судовой контроллер, который может включать один или более процессоров, выполняет набор отдельных процессов для управления формой и расстоянием между сейсмическими косами. Пользовательский интерфейс 36 управления позволяет оператору устанавливать различные параметры рулевого управления в поперечном направлении. Параметры могут включать следующие:
a) параметр «Фантомная сейсмическая коса включена/выключена» включает или выключает рулевое управление опорной сейсмической косы относительно фантомной сейсмической косы;
b) параметр «Опорная коса» выбирает, какую сейсмическую косу использовать в качестве опорной сейсмической косы Sr при автоматическом управлении расстоянием между сейсмическими косами;
c) параметр «Максимальный угол килей для косы Sr» - максимальное значение угла килей, используемое для опорной сейсмической косы во время работы с линейным движением (для ограничения смещения диапазона управления углами килей и для ограничения потокового шума, возникающего вследствие поперечных смещений сейсмической косы);
d) параметр «Режим» задает режим работы с линейным движением (режим «веера» или даже режим распределения в пространстве для формы сейсмических кос и расстояния между ними);
e) параметр «Отклонение от курса» - ручная установка желаемого отклонения от курса для линии 3D-исследований.
Некоторые из этих параметров передают в сетевые вычислительные средства 38, которые вычисляют текущие положения всех действительных сейсмических кос Si-Sn. (В настоящем описании и в формуле изобретения "положение" означает положение и форму сейсмической косы, за исключением явного использования вместе с "формой".) Сетевой вычислитель затем вычисляет упомянутые расстояния между действительными сейсмическими косами и их соответствующими целевыми сейсмическими косами.
В течение обычного исследования планировщик 40 реального времени задает курс следования судна. Каждый курс состоит из последовательности поворотов, за которыми следует линейные проходы. Планировщик определяет точки съемки вдоль линейной части курса и на концах поворотов, а также отклонившиеся от линейного направления положения судна во время оставшихся частей поворотов. В 3D-исследованиях конечное целевое значение отклонения от курса при выходе из поворота является значением, вводимым вручную посредством пользовательского интерфейса. В 4D-исследованиях целевые углы отклонения от курса устанавливают и подстраивают вдоль линии наблюдения на основе углов отклонений от курса, записанных во время базового исследования, которое рассматриваемое новое исследование предназначено воспроизвести.
Планировщик реального времени передает вычисленные установки курса, включающие ассоциацию соответствия отклонений от курса, в средства 42 автоматического рулевого управления, которые вычисляют требуемые будущие положения фантомных сейсмических кос. Средства автоматического рулевого управления являются процессом, вычисляющим расстояние и направление от каждого узла с датчиком положения, а также от узлов для других устройств, на каждой сейсмической косе, по отношению к расстоянию наибольшего приближения к сейсмической косе, являющемуся целевым для данной сейсмической косы, при этом другая сейсмическая коса может быть действительной сейсмической косой или виртуальной (фантомной) сейсмической косой, связанной с действительной сейсмической косой. Процесс автоматического рулевого управления вычисляет также форму и положение фантомной косы G1, которая является эталоном, например, для опорной сейсмической косы S1. Процесс автоматического рулевого управления может также опционально вычислять фантомные сейсмические косы G2-GN, связанные с каждой из других действительных сейсмических кос S2-SN, исходя из вычисленных положений действительных сейсмических кос, принятых от сетевого вычислителя (см. фиг.2 для примера одной из других фантомных сейсмических кос G4, показанной для иллюстрации без отклонения от курса судна.) Это позволяет менять фантомную и опорную косы, например, с крайней по левому борту на крайнюю по правому борту. Процесс автоматического рулевого управления обновляет форму и положения фантомной сейсмической косы через практически постоянные интервалы времени при поворотах и вне линейного движения, а также, как правило, один раз на съемку в течение линейного движения.
Интерфейс 43 рулевого управления в поперечном направлении принимает значения расстояния между сейсмическими косами и, под управлением пользовательского интерфейса управления, передает их в контроллер 44 положения в поперечном направлении, который преобразует значения расстояния между сейсмическими косами для каждого узла в команды рулевого управления сейсмическими косами в поперечном направлении, включающие, например, команды углов поворота килей, и передает их по линии 30 связи в устройства 16 рулевого управления в поперечном направлении, которые соответственно корректируют углы поворота своих килей.
Иногда во время линейного прохода сильные течения или проблемы с навигацией или оборудованием могут привести к неадекватному покрытию зоны исследований сетью сейсмических кос. Зону исследований разбивают на сетку бинов (bin). Если в некоторых бинах был собран недостаточный объем данных, проход должен быть повторен, по меньшей мере частично, для заполнения этих бинов данными. Процесс повторения частей линейных проходов в последующих линейных проходах для завершения набора данных называют загущением (infill). Процесс 46 диспетчера бинирования в реальном времени контролирует бины в течение линейного прохода и регулирует распределение сейсмических кос для минимизации объема необходимого загущения. Требуемый курс, вычисленный исходя из данных бинирования, для выполнения требований загущения передают процессу автоматического рулевого управления, который затем вычисляет соответствующую фантомную косу для этого прохода.
Другой процесс используют для контроля распределения системы сейсмических кос во время ее развертывания для облегчения автоматизации распределения расстояний между сейсмическими косами во время их размотки с задней палубы исследовательского судна. Диспетчер 48 развертывания передает данные о курсе и развертывании процессу автоматического рулевого управления, который вычисляет положение фантомной косы для сетевого вычислителя для управления устройствами рулевого управления в поперечном направлении.
Блок-схема процесса рулевого управления сейсмическими косами, который выполняют один раз для каждой точки съемки при линейном движении, или через постоянные промежутки времени вне линейного движения, а также при поворотах, показан на фиг.4А-4С. Сначала судовой контроллер вычисляет сетевое решение (шаг 50) исходя из данных о расстояниях, собранных от акустических дальномеров, и данных о курсах, полученных от датчиков курса. На основе этого сетевого решения обновляют (шаг 52) положения действительных сейсмических кос. Эти шаги выполняет сетевой вычислитель. Затем процесс автоматического рулевого управления обновляет положение фантомной сейсмической косы на основе требуемого отклонения от курса судна (шаг 54). После этого сетевой вычислитель вычисляет расстояние между фантомной косой и опорной косой (шаг 56) (например, между каждым узлом на косе S1 и его ближайшей точкой к косе G1, а также расстояния между каждой из других действительных сейсмических кос и соседней сейсмической косой (шаг 58) (между узлами на косе Sn и их ближайшими точками к косе Sn-1). После того как вычислены упомянутые расстояния для каждого узла сети, интерфейс рулевого управления в поперечном направлении, под управлением пользовательского интерфейса управления, передает (шаг 60) эти расстояния контроллеру положения в поперечном направлении.
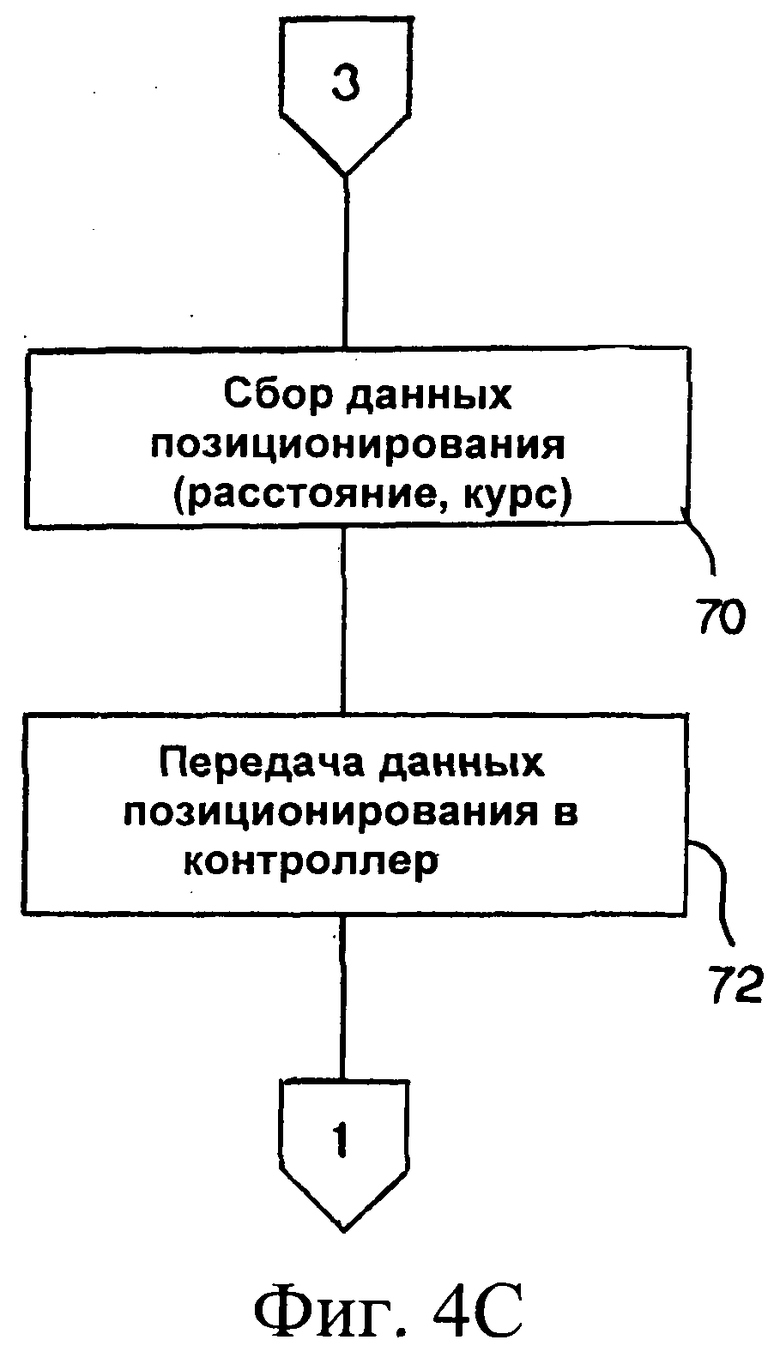
Контроллер положения в поперечном направлении вычисляет (шаг 62) элементы "расстояние-ошибка", соответствующие расстояниям между устройствами рулевого управления в поперечном направлении и одной или более действительными или фантомными сейсмическими косами. Элементы управления с обратной связью, например пропорционально-интегральный элемент (proportional-integral, PI) управления с обратной связью, вычисляет (шаг 64) новые углы поворота килей для управляющих плоскостей устройств. Мотор каждого устройства рулевого управления в поперечном направлении перемещает киль к новому углу киля (шаг 66). Во время контроля устройствами рулевого управления в поперечном направлении для рулевого управления сейсмическими косами судовой контроллер запускает новый цикл (шаг 68) сбора данных, в течение которого датчики положения (датчики курса и акустические дальномеры) получают данные о положении сейсмической косы (курс и акустические расстояния) (шаг 70). Затем датчики положения передают (шаг 72) по линии связи данные о положении в контроллер, чтобы сетевой вычислитель мог вычислить сетевое решение в течение следующего цикла обновления данных позиционирования, как правило, выполняющегося один раз на съемку при линейном движении и с постоянной частотой вне линейного движения или при поворотах.
Несмотря на то, что настоящее изобретение было описано со ссылками на предпочтительный вариант его осуществления, возможны и другие варианты. Например, пропорционально-интегральные элементы управления с обратной связью, работающие в судовом контроллере положения в поперечном направлении, могут функционировать отдельно в каждом устройстве рулевого управления в поперечном направлении, расположенном на сейсмических косах. В таком случае устройства рулевого управления в поперечном направлении могут принимать необходимые значения расстояния от судового контроллера в командном сообщении. В другом примере рассматриваемая система может быть адаптирована для исследований с применением нескольких судов, при этом большинство функций судового контроллера выполняет главный контроллер, размещенный на борту одного из судов и связанный с подчиненными бортовыми контроллерами остальных судов. Подчиненные контроллеры в таком случае, главным образом, будут предназначены для взаимодействия с датчиками положения и устройствами рулевого управления в поперечном направлении. Главный контроллер будет выполнять большинство остальных функций, например, вычисление полного сетевого решения, задание курса для каждой сейсмической косы и определение фантомной сейсмической косы для сети сейсмических кос каждого судна. Линия радиосвязи или другой беспроводной связи будет обеспечивать связь главного контроллера с подчиненными контроллерами на других судах. В качестве другого примера структурная схема определяет набор дискретных блоков, выполняющих конкретные функции. Названия этих блоков и функции, которые они выполняют, выбраны произвольно для упрощения описания системы. Тот же эффект можно получить, распределив различные процессы между блоками множеством способов. Таким образом, как следует из этих нескольких примеров, объем формулы изобретения не ограничен подробно описанным предпочтительным вариантом осуществления изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления сейсмоакустическими косами и устройство позиционирования для его осуществления | 2015 |
|
RU2607076C1 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| ГРУППА ИСТОЧНИКОВ ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2017 |
|
RU2739725C2 |
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| СЕЙСМОКОСА, ОТСЛЕЖИВАЮЩАЯ МОРСКОЕ ДНО | 2007 |
|
RU2451309C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| СИСТЕМА ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2008 |
|
RU2392643C2 |
Изобретение относится к области геофизики и может быть использовано при проведении морских прибрежных сейсморазведочных работ. Предлагаются способ и система для управления формой и расстояниями в схеме расположения сейсмических кос, буксируемых позади исследовательского судна (10). Каждой сейсмической косой управляют посредством устройств (16) рулевого управления в поперечном направлении, размещенных вдоль ее длины в конкретных узлах, для достижения заданного расстояния от соседней сейсмической косы. Одной из этих действительных сейсмических кос, используемой в качестве опорной для других действительных сейсмических кос, управляют для достижения заданного расстояния от мнимой, или фантомной, сейсмической косы, виртуально буксируемой вместе с действительными сейсмическими косами. Технический результат - повышение точности разведочных данных. 2 н. и 10 з.п. ф-лы, 6 ил.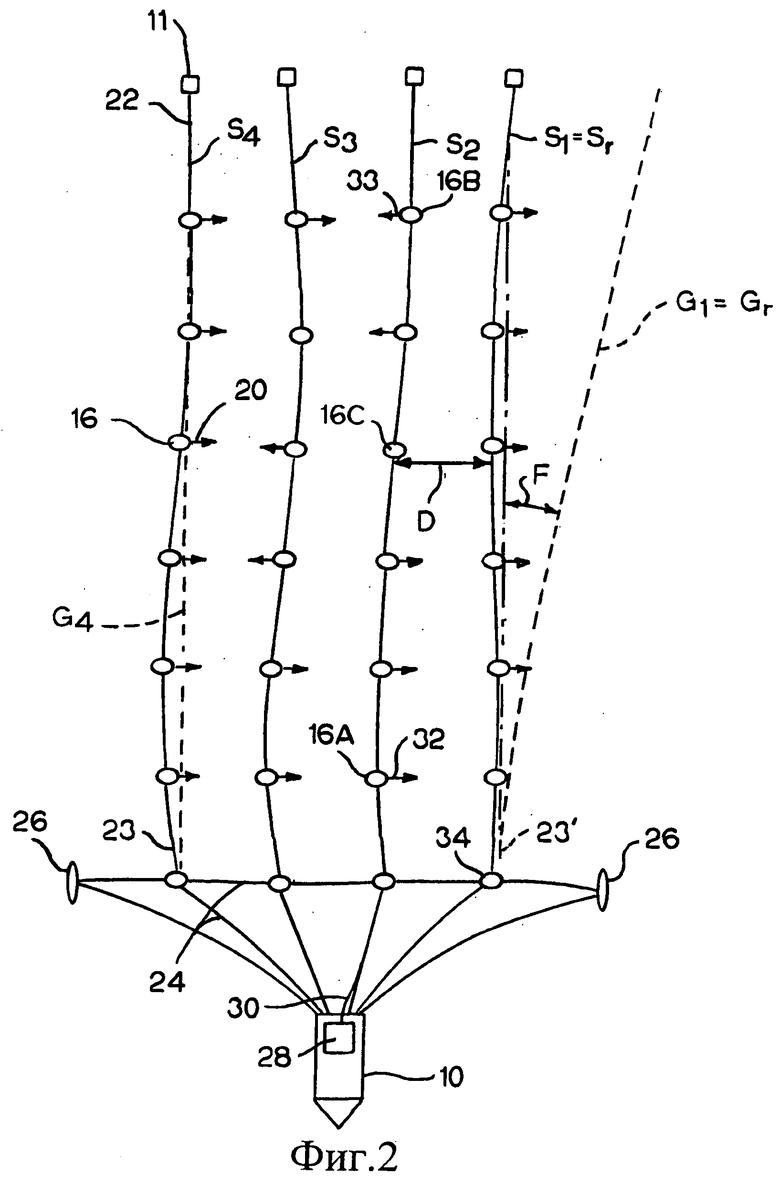
1. Способ позиционирования одной или более сейсмических кос позади исследовательского судна (10), включающий:
буксирование первой действительной сейсмической косы (S1), оснащенной устройствами (16) рулевого управления в поперечном направлении, расположенными в разнесенных положениях вдоль длины сейсмической косы (S1);
задание мнимой сейсмической косы (Gr), имеющей форму и положение позади исследовательского судна (10);
определение формы и положения первой действительной сейсмической косы (S1);
задание целевого расстояния (D) в поперечном направлении между мнимой сейсмической косой (Gr) и первой действительной сейсмической косой (S1);
передачу команд рулевого управления в поперечном направлении в устройства (16) рулевого управления в поперечном направлении для управления первой действительной сейсмической косой (S1) для достижения целевого расстояния (D) в поперечном направлении от мнимой сейсмической косы (Gr),
буксирование множества действительных сейсмических кос (S1-SN), смещенных в поперечном направлении от первой действительной сейсмической косы (S1) и оснащенных устройствами (16) рулевого управления в поперечном направлении, расположенными в разнесенных положениях вдоль длин сейсмических кос (S1-SN),
определение форм и положений действительных сейсмических кос (S1-SN),
задание целевых расстояний (D) в поперечном направлении между каждой сейсмической косой из упомянутого множества действительных сейсмических кос и другой действительной сейсмической косой, включая указанную первую действительную сейсмическую косу (S1),
передачу команд рулевого управления в поперечном направлении в устройства (16) рулевого управления в поперечном направлении для управления множеством действительных сейсмических кос (S1-SN) для достижения соответствующих целевых расстояний (D) в поперечном направлении.
2. Способ по п.1, в котором одно из целевых расстояний в поперечном направлении является расстоянием между первой действительной сейсмической косой и соседней сейсмической косой из упомянутого множества действительных сейсмических кос.
3. Способ по п.1, в котором целевое расстояние в поперечном направлении для каждой действительной сейсмической косы является расстоянием между этой сейсмической косой и соседней сейсмической косой.
4. Способ по любому из пп.1-3, включающий задание мнимой сейсмической косы исходя из заранее заданного курса и данных об отклонении от курса.
5. Способ по любому из пп.1-3, включающий задание мнимой сейсмической косы и целевых расстояний в поперечном направлении для минимизации необходимости последующего загущения.
6. Способ по любому из пп.1-3, включающий задание мнимой сейсмической косы и целевых расстояний в поперечном направлении для рулевого управления множеством сейсмических кос при повороте.
7. Способ по любому из пп.1-3, включающий использование целевого угла отклонения от курса для определения формы мнимой сейсмической косы.
8. Система для управления распределением множества сейсмических кос (S1-SN), буксируемых позади исследовательского судна (10), включающая:
множество действительных сейсмических кос (S1-SN), буксируемых исследовательским судном (10) и имеющих смещенные друг от друга в поперечном направлении головные окончания (23), при этом каждая действительная сейсмическая коса (S1-SN) имеет множество устройств (16) рулевого управления в поперечном направлении и датчиков положения, размещенных вдоль ее длины;
контроллер (28), принимающий данные о положении от упомянутых датчиков положения и включающий:
средства (42) автоматического рулевого управления для вычисления формы и положения мнимой сейсмической косы (Gr), буксируемой исследовательским судном (10);
сетевые вычислительные средства, которые определяют формы и положения действительных сейсмических кос (S1-SN) исходя из данных о положении и вычисляют расстояния (D) в поперечном направлении для каждой из действительных сейсмических кос, при этом расстояние в поперечном направлении для первой действительной сейсмической косы определяют относительно формы и положения мнимой сейсмической косы (Gr), принятых от системы автоматического рулевого управления, а расстояния (D) в поперечном направлении для других действительных сейсмических кос (S1-SN) определяют относительно одной из действительных сейсмических кос, включая указанную первую действительную сейсмическую косу (S1);
при этом контроллер передает команды рулевого управления в поперечном направлении в устройства рулевого управления в поперечном направлении в соответствии с упомянутыми вычисленными расстояниями в поперечном направлении.
9. Система по п.8, в которой контроллер (28) включает один или более процессоров и средства автоматического рулевого управления, а сетевые вычислительные средства являются процессами, исполняемыми одним или более процессорами.
10. Система по п.8 или 9, в которой контроллер (28) включает планировщик (40) реального времени, который задает курс следования судна (10) во время исследования и при поворотах, а также передает этот курс в средства (42) автоматического рулевого управления для вычисления формы и положения мнимой сейсмической косы (Gr).
11. Система по п.8 или 9, в которой контроллер (28) включает диспетчер (46) бинирования, который передает курс, выведенный из данных бинирования, в средства (42) автоматического рулевого управления для вычисления формы и положения мнимой сейсмической косы (Gr) для минимизации необходимости последующего загущения.
12. Система по п.8, в которой контроллер (28) включает диспетчер развертывания, который задает курс следования судна (10) во время разматывания и извлечения действительных сейсмических кос, а также передает этот курс в средства (42) автоматического рулевого управления для вычисления формы и положения мнимой сейсмической косы (Gr).
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| WO 2005096018 A1, 13.10.2005, | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ С РАСШИРЕННЫМ ДИАПАЗОНОМ АКТИВНОЙ РАБОТЫ | 2007 |
|
RU2331971C1 |
| US 20070064526 A1 , 22.03.2007 | |||

