[0001] Настоящая заявка испрашивает приоритет по заявке на патент Китая №202010456541.0, поданной в Национальное управление интеллектуальной собственности Китая 26 мая 2020 года и озаглавленной «Способ и устройство для управления боковым движением самоуправляемого транспортного средства и самоуправляемое транспортное средство», все содержание которой включено в настоящий документ путем ссылки.
Область техники
[0002] Настоящее изобретение относится к технической области самоуправляемых транспортных средств, в частности, к способу и устройству для управления боковым движением самоуправляемого транспортного средства, и к самоуправляемому транспортному средству.
Уровень техники
[0003] Система управления боковым движением самоуправляемого транспортного средства вычисляет желаемую команду рулевого управления в режиме реального времени в соответствии с запланированной траекторией и информацией верхнего уровня о положении транспортного средства и управляет транспортным средством для движения по целевой траектории. В настоящее время оптимальный коэффициент усиления параметра управления обычно получают путем решения уравнения Риккати в режиме онлайн, что требует большого объема вычислений и требует большего количества вычислительных ресурсов.
Раскрытие сущности изобретения
[0004] Настоящее изобретение направлено на решение или исправление по меньшей мере одной из вышеупомянутых технических проблем.
[0005] Для этого первая задача настоящего изобретения заключается в обеспечении способа управления боковым движением самоуправляемого транспортного средства.
[0006] Вторая задача настоящего изобретения заключается в создании устройства для управления боковым движением самоуправляемого транспортного средства.
[0007] Третья задача настоящего изобретения заключается в создании самоуправляемого транспортного средства.
[0008] Для решения первой задачи настоящего изобретения варианты осуществления настоящего изобретения обеспечивают способ управления боковым движением самоуправляемого транспортного средства, включающий: установку параметров управления линейно-квадратичного регулятора; получение общих параметров транспортного средства; получение коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства; получение коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления; получение величины обратной связи по ошибке состояния, кривизны траектории и угла наклона транспортного средства; получение управляющей величины и компенсирующей величины в соответствии с коэффициентом усиления параметра управления в режиме реального времени, величиной обратной связи по ошибке состояния, кривизной траектории и углом наклона транспортного средства; и получение ожидаемого угла поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной и вывод ожидаемого угла поворота рулевого колеса в систему рулевого управления по проводам.
[0009] Данный вариант осуществления позволяет реализовать оптимальное управление боковым движением самоуправляемого транспортного средства без статической ошибки, значительно сократить объем вычислений, обеспечить сходимость оптимального коэффициента усиления системы управления и учитывать влияние кривизны дороги, уклона дороги и неопределенности общих параметров транспортного средства для достижения высокой надежности и высокой точности отслеживания желаемой траектории движения.
[0010] Кроме того, варианты осуществления, предусмотренные вышеупомянутыми вариантами осуществления настоящего изобретения, могут также иметь следующие дополнительные технические признаки.
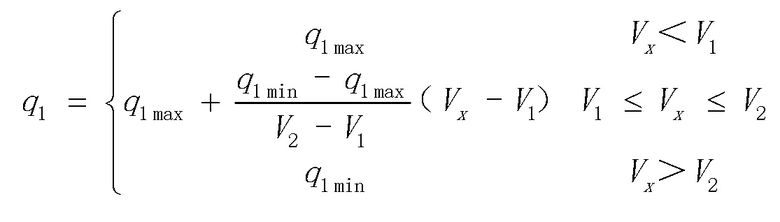
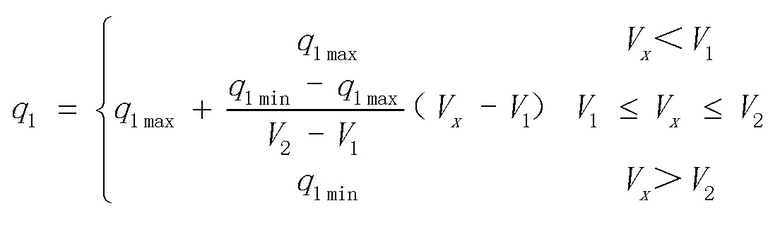
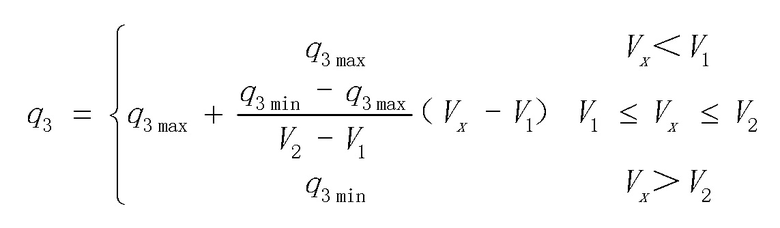
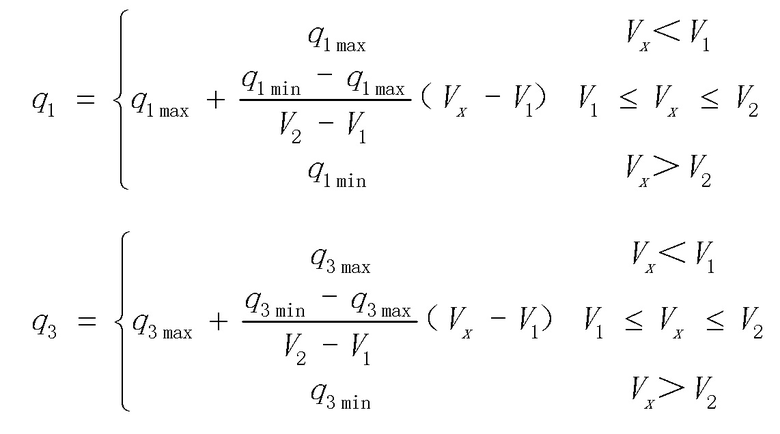
[0011] В вышеупомянутом варианте осуществления этап установки параметров управления линейно-квадратичного регулятора включает: параметры управления включают первую весовую матрицу Q и вторую весовую матрицу R, Q=diag[q1, q2, q3, q4], R=[r], где q1, q2, q3, q4 и r являются пятью параметрами управления, соответственно, q2, q4 и r устанавливаются на фиксированные значения, a q1, q3 получают в соответствии со следующей формулой:
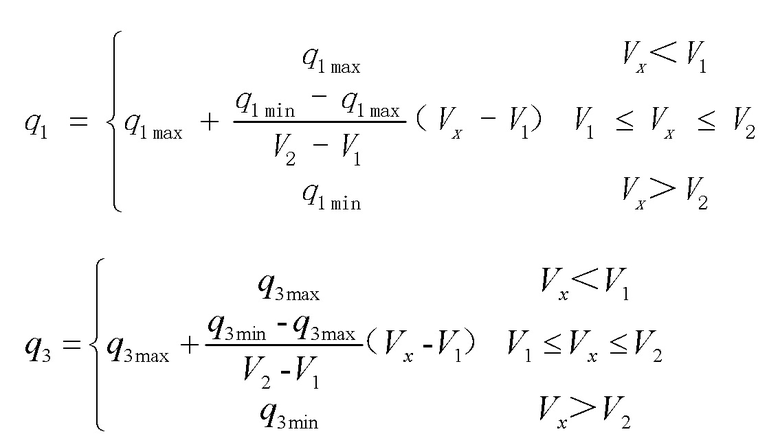
[0012] Где q1max - максимальное значение q1, q1min - минимальное значение q1, q3max - максимальное значение q3, q3min - минимальное значение q3, Vx - продольная скорость транспортного средства, V1 - первое пороговое значение скорости, a V2 - второе пороговое значение скорости.
[0013] В данном варианте осуществления q2, q4, и r устанавливают на фиксированные значения, выполняют линейную регулировку параметров q1, q3 в соответствии с продольной скоростью Vx транспортного средства, то есть весовая матрица параметров управления линейно-квадратичного регулятора использует метод линейной регулировки скорости, который может значительно уменьшить объем вычислений.
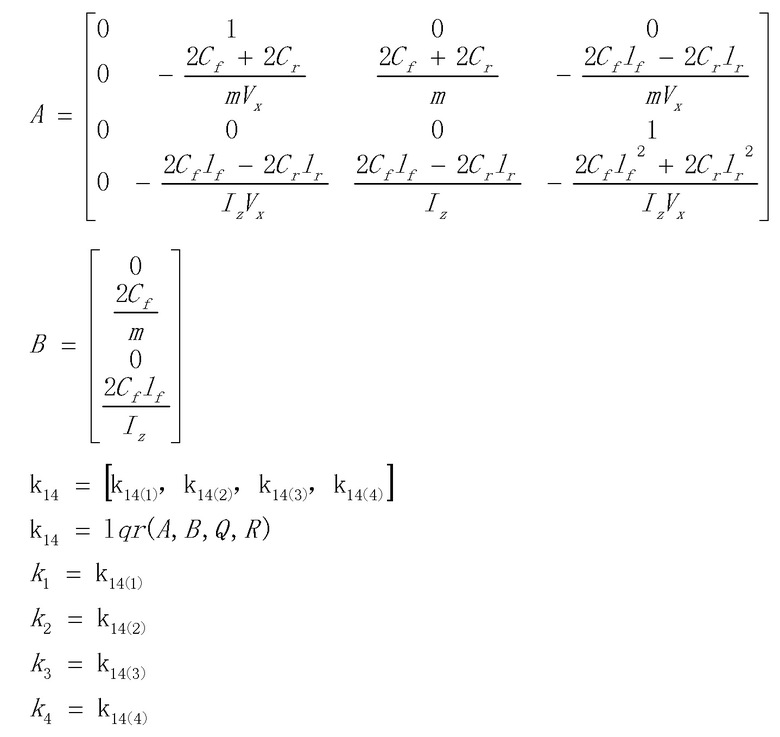
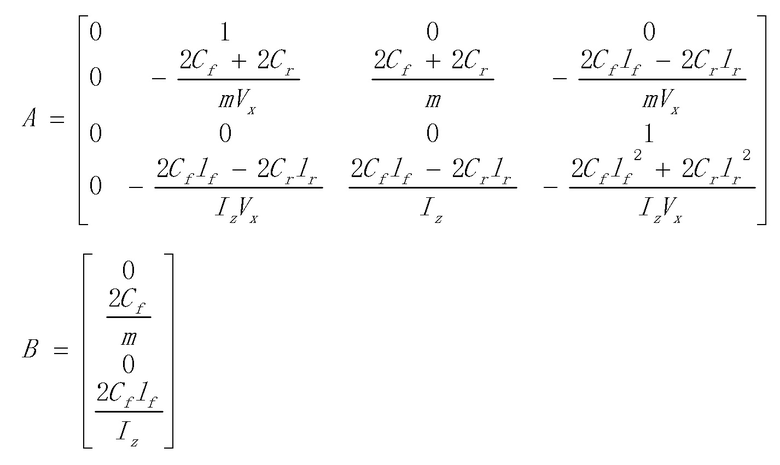
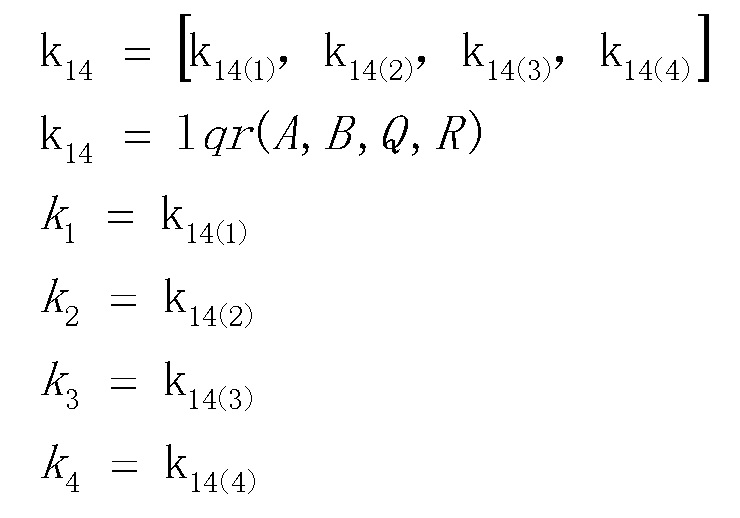
[0014] В любом из вышеупомянутых вариантов осуществления этап получения коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства включает: получение коэффициента усиления параметра управления в соответствии со следующей формулой:
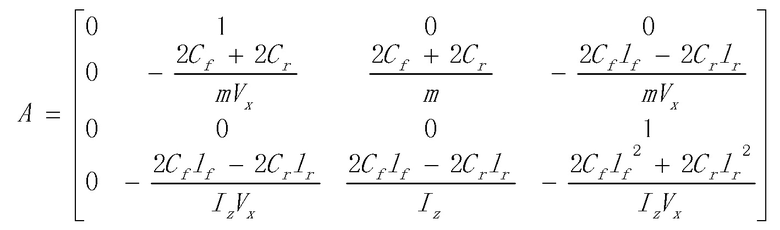
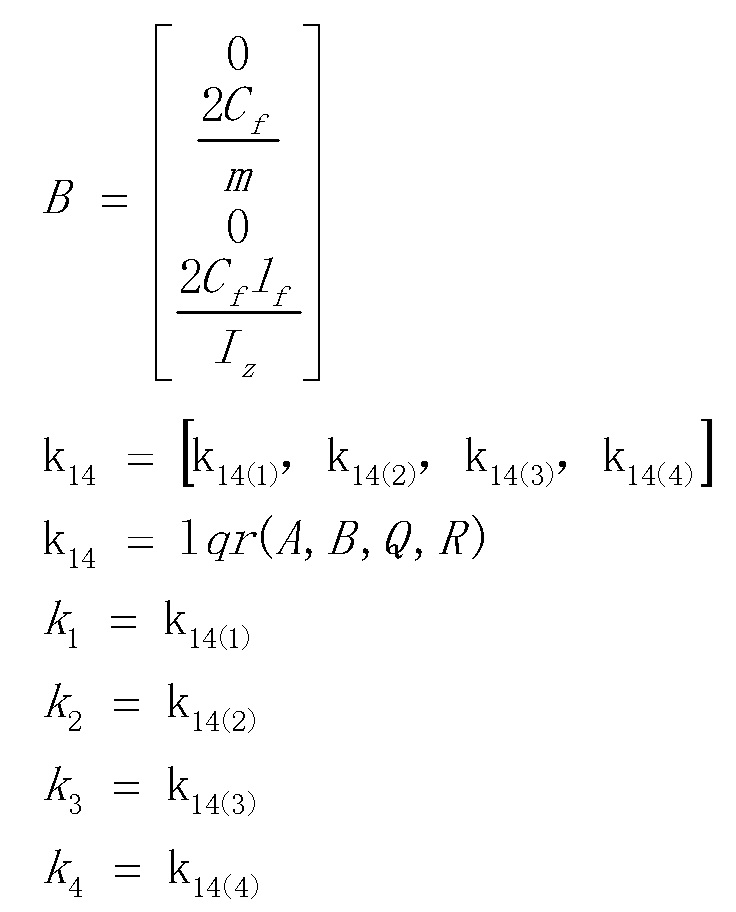
[0015] Где m - масса транспортного средства, Iz - инерция вращения транспортного средства вокруг вертикального направления, If - расстояние от передней оси транспортного средства до центра масс, Ir - расстояние от задней оси транспортного средства до центра масс, Cf - жесткость переднего колеса при прохождении поворотов и Cr - жесткость заднего колеса при прохождении поворотов, Vx - продольная скорость транспортного средства, k14 - матрица сходимости коэффициента усиления системы управления, k14(1), k14(2), k14(3) и k14(4) - четыре элемента в матрице сходимости коэффициента усиления системы управления, соответственно, k1, k2, k3 и k4 - четыре коэффициента усиления параметра управления, соответственно.
[0016] Общие параметры транспортного средства включают массу транспортного средства и/или инерцию вращения транспортного средства вокруг вертикального направления и/или расстояние от передней оси транспортного средства до центра масс и/или расстояние от задней оси транспортного средства до центра масс и/или жесткость передних колес при прохождении поворотов и/или жесткость задних колес при прохождении поворотов. В соответствии с общими параметрами транспортного средства и моделью управляемого объекта оптимальные коэффициенты k1, k2, k3 и k4 усиления параметра управления вычисляют в режиме офлайн с помощью функции Iqr в MATLAB, что значительно сокращает объем вычислений по сравнению с решением коэффициента усиления параметров управления в режиме онлайн.
[0017] В любом из вышеупомянутых вариантов осуществления этап получения коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления включает: принятие скорости в качестве независимой переменной и выполнение полиномиальной аппроксимации коэффициента усиления параметра управления для получения первого полинома; и получение коэффициента усиления параметра управления в режиме реального времени в соответствии с первым полиномом и продольной скоростью транспортного средства в режиме реального времени.
[0018] Для получения коэффициента усиления параметра управления в режиме реального времени применяют метод вычисления полиномиальной аппроксимации на основе коэффициента усиления параметра управления, полученного в режиме офлайн, и оптимизируют величину вычисления.
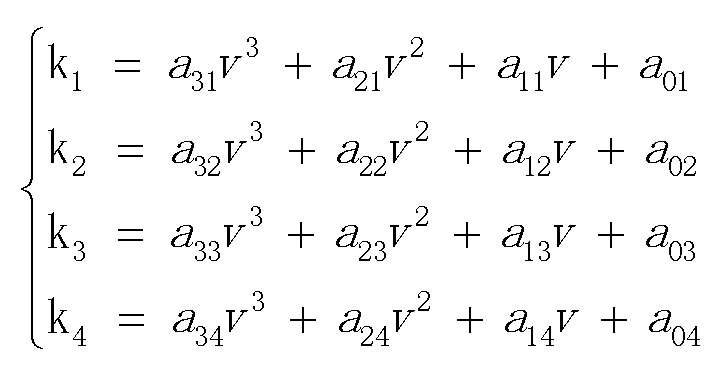
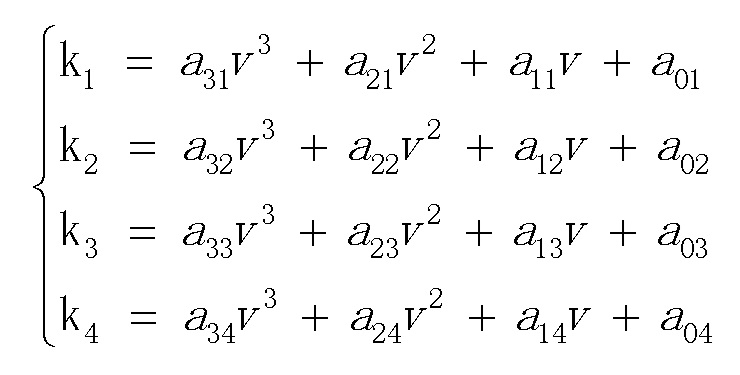
[0019] В любом из вышеупомянутых вариантов осуществления этап получения коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления включает: принятие скорости в качестве независимой переменной и выполнение полиномиальной аппроксимации коэффициента усиления параметра управления третьего порядка, и первый полином получают в виде:
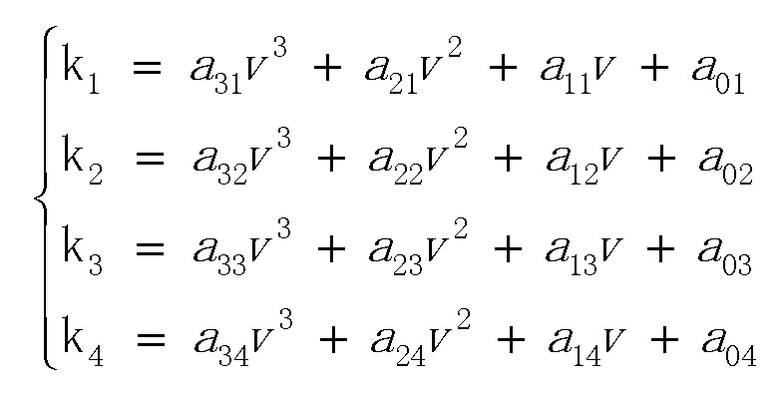
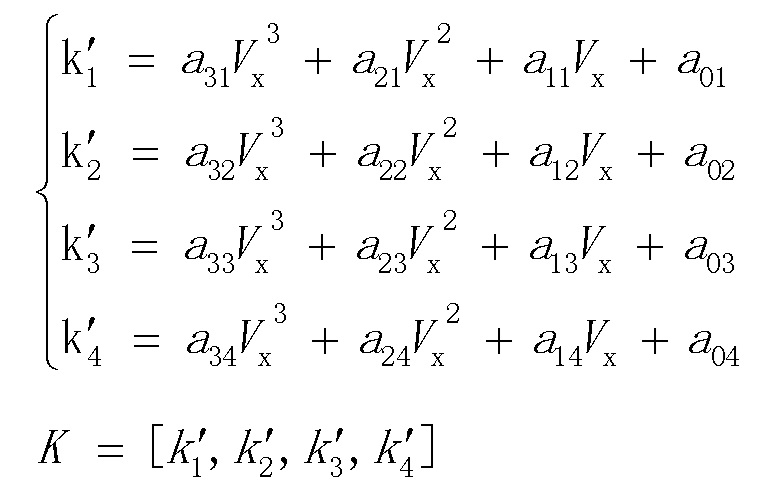
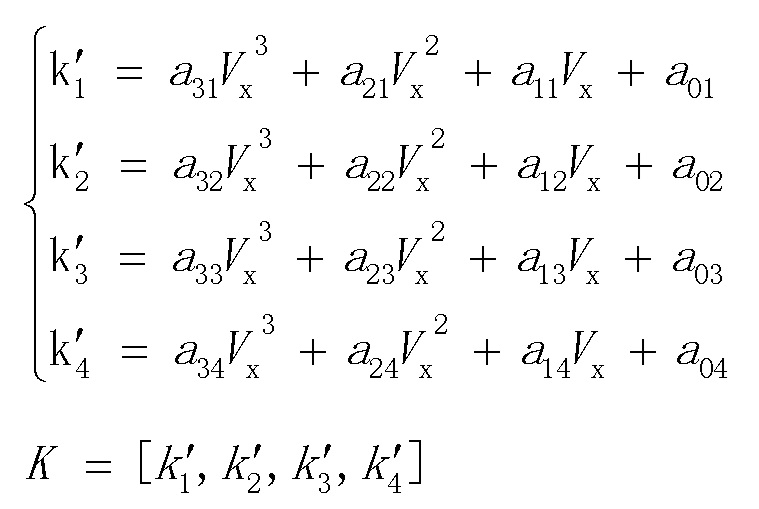
[0020] Где а31, a21, a11 и a01 - полиномиальные коэффициенты параметров k1 управления третьего порядка, а32, a22, а12 и а02 - полиномиальные коэффициенты параметров k2 управления третьего порядка, а33, а23, a13 и а03 - полиномиальные коэффициенты параметров k3 управления третьего порядка, а34, a24, a14 и а04 - полиномиальные коэффициенты параметров k4 управления третьего порядка, v - скорость; получение коэффициента K усиления параметра управления в режиме реального времени в соответствии с первым полиномом и продольной скоростью транспортного средства в режиме реального времени:
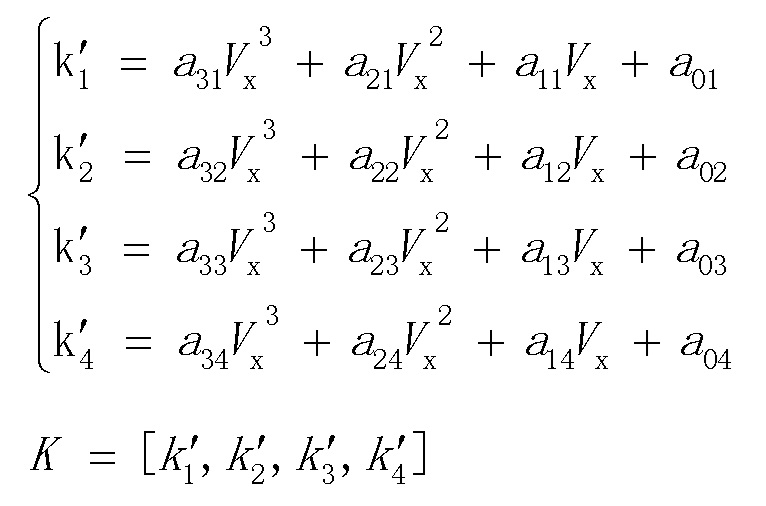
[0021] Где Vx - продольная скорость транспортного средства.
[0022] В данном варианте осуществления применяют полиномиальную аппроксимацию третьего порядка, и оптимальный коэффициент усиления параметра управления вычисляют в режиме реального времени в соответствии с фактической скоростью, передаваемой обратно транспортным средством, что не только уменьшает объем вычислений оптимального коэффициента усиления параметра управления, но также обеспечивает сходимость и надежность оптимального коэффициента усиления параметра управления.
[0023] В любом из вышеупомянутых вариантов осуществления этап получения величины обратной связи по ошибке состояния включает:
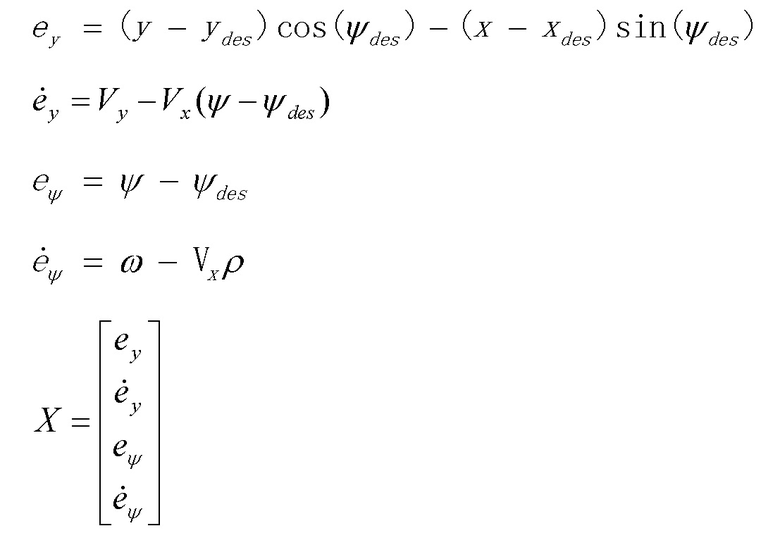
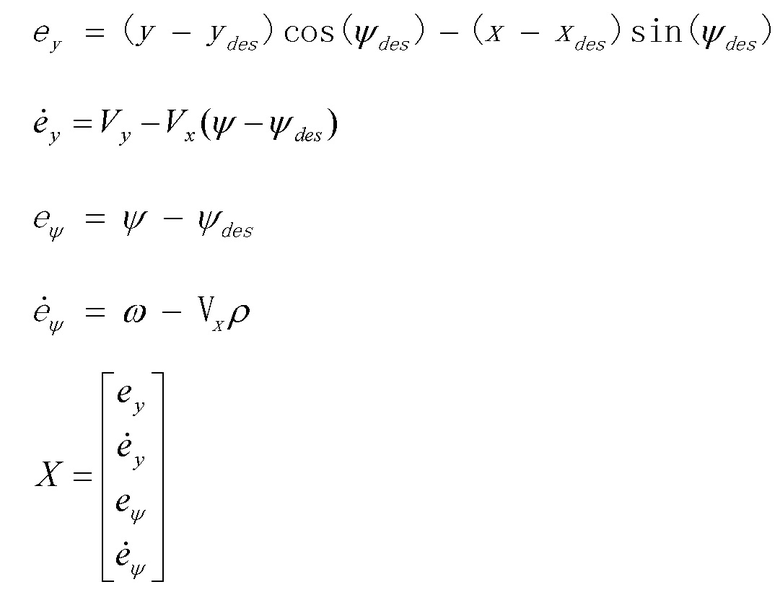
[0024] получение величины обратной связи по ошибке состояния в соответствии со следующей формулой:
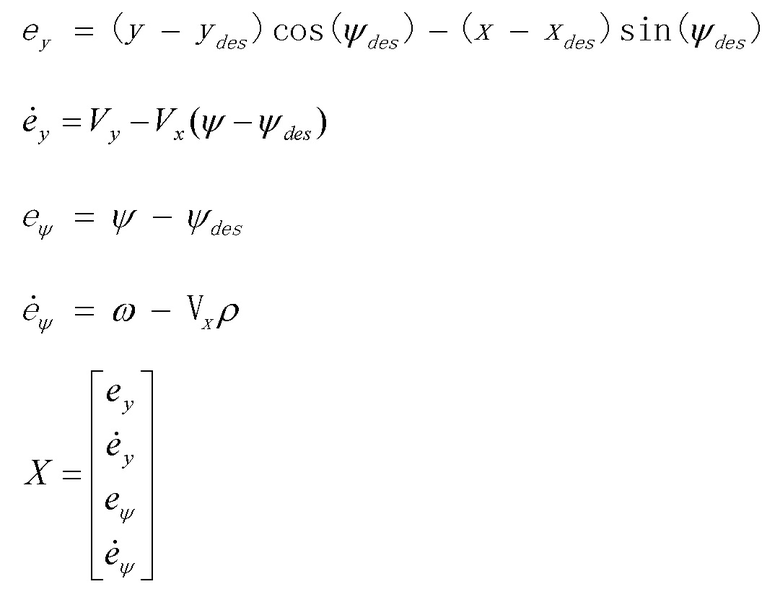
[0025] Где ey - отклонение бокового положения, - скорость изменения отклонения бокового положения, eψ - отклонение курсового угла,
- скорость изменения отклонения бокового положения, eψ - отклонение курсового угла,  - скорость изменения отклонения курсового угла, X - величина обратной связи по ошибке состояния, Vx - продольная скорость транспортного средства, Vy - боковая скорость транспортного средства, (х,y) - положение транспортного средства в текущий момент, (xdes,ydes) - желаемое положение траектории, ψ - курсовой угол транспортного средства в текущий момент, ψdes - курсовой угол желаемой траектории, ω - скорость рыскания транспортного средства и ρ - кривизна желаемой целевой точки.
- скорость изменения отклонения курсового угла, X - величина обратной связи по ошибке состояния, Vx - продольная скорость транспортного средства, Vy - боковая скорость транспортного средства, (х,y) - положение транспортного средства в текущий момент, (xdes,ydes) - желаемое положение траектории, ψ - курсовой угол транспортного средства в текущий момент, ψdes - курсовой угол желаемой траектории, ω - скорость рыскания транспортного средства и ρ - кривизна желаемой целевой точки.
[0026] За счет обновления ошибки состояния и передачи ее обратно в коэффициент усиления системы управления эффект бокового управления становится более точным.
[0027] В любом из вышеупомянутых вариантов осуществления этап получения управляющей величины и компенсирующей величины в соответствии с коэффициентом усиления параметра управления, коэффициентом усиления параметра управления в режиме реального времени, ошибкой состояния, кривизной траектории и углом наклона транспортного средства включает:
[0028] получение управляющей величины обратной связи в соответствии с коэффициентом усиления параметра управления в режиме реального времени и величиной обратной связи по ошибке состояния, составляющей:
δsw_b=-KX
[0029] где K - коэффициент усиления параметра управления в режиме реального времени, X - величина обратной связи по ошибке состояния;
[0030] получение управляющей величины суммарной ошибки положения в соответствии с суммарной ошибкой положения, составляющей:

[0031] где ki - коэффициент суммирования, ey - отклонение бокового положения, Т - период управления,  - величина периода управления предыдущего цикла, составляющее δsw_i.
- величина периода управления предыдущего цикла, составляющее δsw_i.
[0032] получение величины упреждающей компенсации кривизны дороги в соответствии с кривизной траектории, составляющей:

[0033] где m - масса транспортного средства, Vx - продольная скорость транспортного средства, If - расстояние от передней оси транспортного средства до центра масс, Ir - расстояние от задней оси транспортного средства до центра масс, Cf - жесткость переднего колеса при прохождении поворотов, Cr - жесткость заднего колеса при прохождении поворотов, Rdes - радиус траектории, L - сумма If и Ir;
[0034] получение величины упреждающей компенсации уклона дороги в соответствии углом наклона транспортного средства, составляющей:

[0035] где A(i,j) параметр, соответствующий i-й строке и j-му столбцу матрицы A, B(i,j) - параметр, соответствующий i-й строке и j-му столбцу матрицы В, g - ускорение силы тяжести, γ - угол наклона транспортного средства.
[0036] Конкретные способы получения управляющей величины обратной связи, управляющей величины суммарной ошибки положения, величины упреждающей компенсации кривизны дороги, величины упреждающей компенсации уклона дороги представлены вышеупомянутыми формулами. В данном варианте осуществления кривизна дороги, определяемая желаемой траекторией, используется для выполнения упреждающей компенсации кривизны дороги, информация о положении используется для выполнения упреждающей компенсации уклона дороги, и вводится элемент суммарного отклонения положения для уменьшения ошибки положения. И всесторонне учитывают влияние неопределенности кривизны дороги, уклона дороги и общих параметров транспортного средства для достижения высокой надежности и высокой точности отслеживания желаемой траектории движения.
[0037] В любом из вышеупомянутых вариантов осуществления этап получения ожидаемого угла поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной и вывод ожидаемого угла поворота рулевого колеса в систему рулевого управления по проводам включает:
[0038] получение ожидаемого угла поворота рулевого колеса в соответствии со следующей формулой:

[0039] где δsw_b - управляющая величина обратной связи, δsw_i - управляющая величина суммарной ошибки положения, δsw_c - величина упреждающей компенсации кривизны дороги, δsw_r - величина упреждающей компенсации уклона дороги, I - передаточное отношение рулевого колеса.
[0040] В соответствии с результатами расчета управляющей величины обратной связи, величины упреждающей компенсации кривизны дороги, величины упреждающей компенсации уклона дороги и управляющей величины суммарного положения, результаты вычислений суммируются и затем умножаются на передаточное отношение рулевого колеса для получения окончательного ожидаемого угла поворота рулевого колеса, который выводится в систему рулевого управления по проводам, для обеспечения отслеживания траектории, чтобы гарантировать, что ошибка установившегося режима все же может быть полностью устранена, если общие параметры транспортного средства не определены.
[0041] Для решения второй задачи настоящего изобретения варианты осуществления настоящего изобретения обеспечивают устройство для управления боковым движением самоуправляемого транспортного средства, содержащее: модуль установки; первый модуль получения; второй модуль получения; третий модуль получения; четвертый модуль получения; пятый модуль получения и шестой модуль получения, причем параметры управления линейно-квадратичного регулятора устанавливаются модулем установки, первый модуль получения выполнен с возможностью получения общих параметров транспортного средства, второй модуль получения выполнен с возможностью получения коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства, второй модуль получения выполнен с возможностью получения коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства, третий модуль получения выполнен с возможностью получения коэффициент усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления, четвертый модуль получения выполнен с возможностью получения ошибки состояния, кривизны траектории и угла наклона транспортного средства, пятый модуль получения выполнен с возможностью получения управляющей величины и компенсирующей величины в соответствии с коэффициентом усиления параметра управления, коэффициентом усиления параметра управления в режиме реального времени, ошибкой состояния, кривизной траектории и углом наклона транспортного средства, шестой модуль получения выполнен с возможностью получения ожидаемого угла поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной и вывода ожидаемого угла поворота рулевого колеса в систему рулевого управления по проводам.
[0042] Данный вариант осуществления позволяет реализовать оптимальное управление боковым движением самоуправляемого транспортного средства без статической ошибки, значительно сократить объем вычислений, обеспечить сходимость оптимального коэффициента усиления системы управления и учитывать влияние кривизны дороги, уклона дороги и неопределенности общих параметров транспортного средства для достижения высокой надежности и высокой точности отслеживания желаемой траектории движения.
[0043] Для решения третьей задачи настоящего изобретения, вариант осуществления настоящего изобретения предусматривает самоуправляемое транспортное средство, содержащее: корпус транспортного средства и управляющее устройство; причем управляющее устройство выполнено с возможностью управления перемещением корпуса транспортного средства с использованием способа управления боковым движением самоуправляемого транспортного средства, как описано в любом из вариантов осуществления настоящего изобретения.
[0044] Самоуправляемое транспортное средство, предусмотренное вариантами осуществления настоящего изобретения, реализует этапы способа управления боковым движением самоуправляемого транспортного средства, как и в любом варианте осуществления настоящего изобретения. Следовательно, оно обладает всеми полезными эффектами способа управления боковым движением самоуправляемого транспортного средства, как и в любом варианте осуществления настоящего изобретения, которые не будут повторяться в данном документе.
[0045] Дополнительные аспекты и преимущества настоящего изобретения станут очевидными в нижеследующем описании или будут изучены путем реализации настоящего изобретения на практике.
Краткое описание чертежей
[0046] Дополнительные аспекты и преимущества настоящего изобретения станут очевидными в нижеследующем описании или будут изучены путем реализации настоящего изобретения на практике.
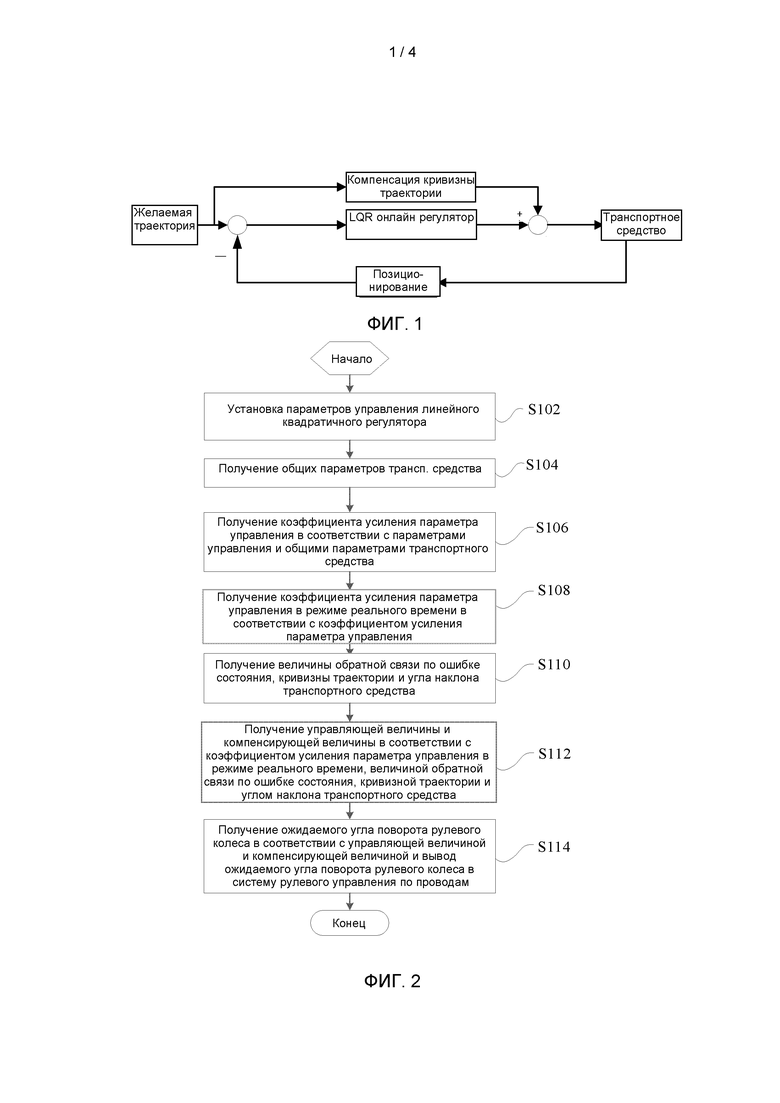
[0047] На фиг. 1 представлено схематическое изображение управления боковым движением самоуправляемого транспортного средства соответствующего уровня техники;
[0048] на фиг. 2 представлена блок-схема способа управления боковым движением самоуправляемого транспортного средства одного варианта осуществления настоящего изобретения;
[0049] на фиг. 3 представлена блок-схема способа получения коэффициента усиления параметра управления в режиме реального времени одного варианта осуществления настоящего изобретения;
[0050] на фиг. 4 представлена блок-схема способа получения управляющей величины и компенсирующей величины одного варианта осуществления настоящего изобретения;
[0051] на фиг. 5 представлена структурная функциональная схема устройства для управления боковым движением самоуправляемого транспортного средства одного варианта осуществления настоящего изобретения;
[0052] на фиг. 6 представлена структурная функциональная схема самоуправляемого транспортного средства одного варианта осуществления настоящего изобретения;
[0053] на фиг. 7 представлено схематическое изображение управления боковым движением самоуправляемого транспортного средства конкретного варианта осуществления настоящего изобретения; и
[0054] на фиг. 8 представлена блок-схема способа управления боковым движением самоуправляемого транспортного средства конкретного варианта осуществления настоящего изобретения.
[0055] Соответствующая взаимосвязь между ссылочными обозначениями и названиями компонентов на фиг. 1-8 является следующей:
[0056] 100: устройство для управления боковым движением самоуправляемого транспортного средства, 110: модуль установки, 120: первый модуль получения, 130: второй модуль получения, 140: третий модуль получения, 150: четвертый модуль получения, 160: пятый модуль получения, 170: шестой модуль получения, 200: самоуправляемое транспортное средство, 210: корпус транспортного средства, 220: управляющее устройство.
Осуществление изобретения
[0057] Для того, чтобы вышеупомянутые задачи, особенности и преимущества настоящего изобретения могли быть поняты более четко, дальнейшее подробное описание настоящего изобретения будет дано ниже в связи с прилагаемыми чертежами и конкретными вариантами осуществления. Следует отметить, что варианты осуществления настоящего изобретения и признаки в вариантах осуществления могут быть объединены друг с другом, если отсутствует конфликт.
[0058] В последующем описании изложены многочисленные конкретные детали для того, чтобы обеспечить полное понимание настоящего изобретения. Однако настоящее изобретение также может быть реализовано другими способами, отличными от описанных в настоящем документе. Следовательно, объем защиты настоящего изобретения не ограничивается конкретными вариантами осуществления, раскрытыми ниже.
[0059] Способ и устройство для управления боковым движением самоуправляемого транспортного средства в некоторых вариантах осуществления настоящего изобретения описаны ниже со ссылкой на фиг. 1-8.
[0060] Система управления боковым движением самоуправляемого транспортного средства вычисляет желаемую команду рулевого управления в режиме реального времени в соответствии с запланированной траекторией и информацией верхнего уровня о местоположении транспортного средства и управляет транспортным средством для управления движением по целевой траектории. В настоящее время линейно-квадратичное оптимальное управление (linear quadratic optimal control, LQR) широко используется для управления боковым движением самоуправляемого транспортного средства. Как показано на фиг. 1, существуют в основном следующие проблемы:
[0061] (1) Оптимальный коэффициент усиления системы управления обычно получают путем решения уравнения Риккати в режиме онлайн, что требует большего количества вычислительных ресурсов и не обязательно гарантирует сходимость коэффициента усиления системы управления.
[0062] (2) В настоящее время большинство систем управления боковым движением самоуправляемых транспортных средств используют внедрение упреждающей компенсации кривизны дороги для уменьшения ошибки установившегося режима и не учитывают ошибку бокового установившегося режима, вызванную уклоном дороги, что снижает качество системы бокового управления транспортным средством.
[0063] (3) Существует определенная неопределенность в общих параметрах транспортного средства, и нельзя гарантировать полное устранение ошибки установившегося режима бокового управления транспортным средством.
[0064] Соответствующий уровень техники представляет собой параметрически адаптивный способ LQR-управления боковым движением для автономных транспортных средств. Метод регулировки параметров LQR-управления, основанный на ошибке отслеживания пути и взаимосвязи положения транспортного средства и дороги, определяет параметры регулятора в текущем состоянии. В соответствии с определенными параметрами управления вычисляют управляющую величину для рулевого управления автономного транспортного средства, и она передается на исполнительный механизм рулевого управления для выполнения, что отличается от данного варианта осуществления в том, что:
[0065] (1) Методы регулировки параметров различаются. Эта соответствующая технология использует метод регулировки параметров ошибки отслеживания пути и взаимосвязи положения транспортного средства и дороги, и в данном варианте осуществления используется метод регулировки параметров скорости.
[0066] (2) Процесс вычисления оптимального коэффициента усиления системы управления является другим. Эта соответствующая технология решает уравнение Риккати в режиме онлайн, чтобы получить оптимальный коэффициент усиления системы управления. В данном варианте осуществления оптимальный коэффициент усиления системы управления вычисляют в режиме офлайн, и затем используют полиномиальную аппроксимацию для управления коэффициентом усиления и его обновления в режиме реального времени.
[0067] (3) Угол поворота рулевого колеса является другим. Эта соответствующая технология учитывает только управляющую величину обратной связи по ошибке состояния. На основе управляющей величины обратной связи по ошибке состояния, данный вариант осуществления также учитывает величину упреждающей компенсации кривизны дороги, величину упреждающей компенсации уклона дороги и управляющую величину суммарной ошибки положения.
[0068] В целом, задачей данного варианта осуществления является решение по меньшей мере одной из нижеперечисленных проблем.
[0069] (1) Решение уравнения Риккати в режиме онлайн для получения оптимального коэффициента усиления системы управления требует большого объема вычислений.
[0070] (2) Ошибка бокового установившегося режима, вызываемая уклоном дороги, не учитывается.
[0071] Вариант осуществления 1
[0072] Как показано на фиг. 2, данный вариант осуществления обеспечивает способ управления боковым движением самоуправляемого транспортного средства, включающий:
[0073] Этап S102 установки параметров управления линейно-квадратичного регулятора;
[0074] Этап S104 получения общих параметров транспортного средства;
[0075] Этап S106 получения коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства;
[0076] Этап S108 получения коэффициента усиления параметра управления в режиме реального времени, в соответствии с коэффициентом усиления параметра управления;
[0077] Этап S110 получения величины обратной связи по ошибке состояния, кривизны траектории и угла наклона транспортного средства;
[0078] Этап S112 получения управляющей величины и компенсирующей величины в соответствии с коэффициентом усиления параметра управления в режиме реального времени, величиной обратной связи по ошибке состояния, кривизной траектории и углом наклона транспортного средства; и
[0079] Этап S114 получения ожидаемого угла поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной и вывод ожидаемого угла поворота рулевого колеса в систему рулевого управления по проводам.
[0080] Данный вариант осуществления позволяет реализовать оптимальное управление боковым движением самоуправляемого транспортного средства без статической ошибки, значительно сократить объем вычислений, обеспечить сходимость оптимального коэффициента усиления системы управления и учитывать влияние кривизны дороги, уклона дороги и неопределенности общих параметров транспортного средства для достижения высокой надежности и высокой точности отслеживания желаемой траектории движения.
[0081] Вариант осуществления 2
[0082] В дополнение к техническим признакам вышеописанных вариантов осуществления данный вариант осуществления дополнительно включает нижеследующие технические признаки.
[0083] В вышеупомянутом варианте осуществления этап установки параметров управления линейно-квадратичного регулятора включает: параметры управления включают первую весовую матрицу Q и вторую весовую матрицу R, Q=diag[q1, q2, q3, q4], R=[r], где q1, q2, q3, q4 и r представляют собой пять параметров управления, соответственно, причем q2, q4 и r устанавливают на фиксированные значения, a q1, q3 получают в соответствии со следующей формулой:
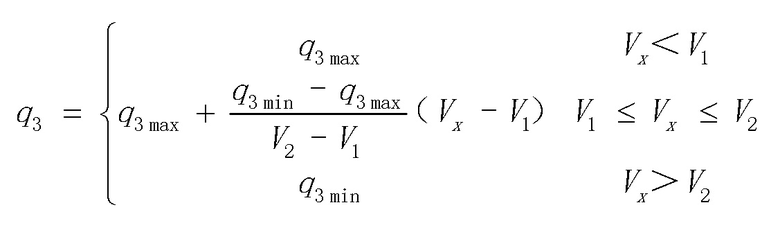
[0084] Где q1max - максимальное значение q1, q1min - минимальное значение q1, q3max - максимальное значение q3, q3min - минимальное значение q3, Vx - продольная скорость транспортного средства, V1 - первое пороговое значение скорости, и V2 - второе пороговое значение скорости.
[0085] В данном варианте осуществления q2, q4 и r устанавливают на фиксированные значения, только для q1, q3, выполняют линейную регулировку параметров в соответствии с продольной скоростью Vx транспортного средства, то есть, весовая матрица параметров управления линейно-квадратичного регулятора использует метод линейной регулировки скорости, который позволяет уменьшить объем вычислений.
[0086] Вариант осуществления 3
[0087] В дополнение к техническим признакам вышеописанных вариантов осуществления данный вариант осуществления дополнительно включает нижеследующие технические признаки.
[0088] Этап получения коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства включает: получение коэффициента усиления параметра управления в соответствии со следующей формулой:
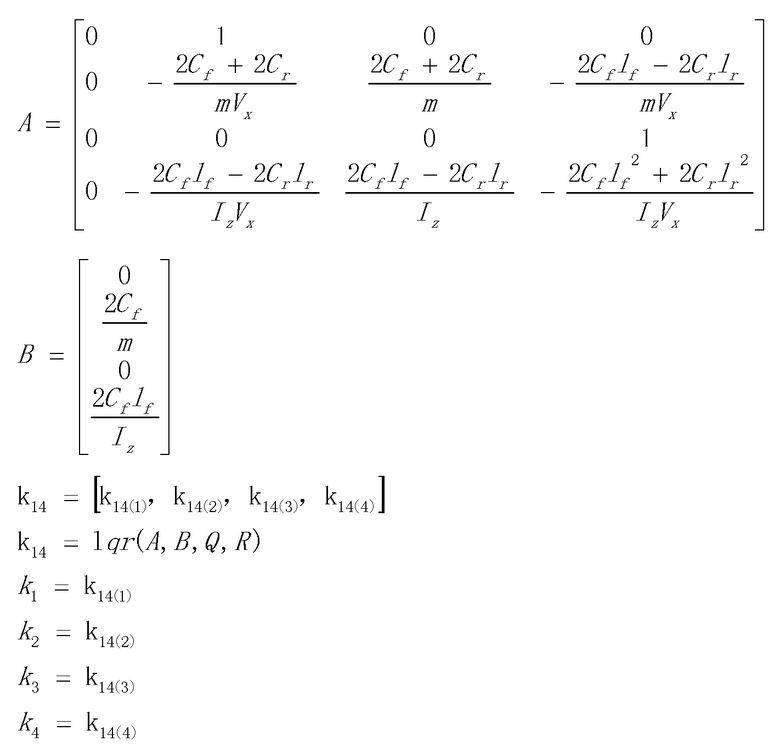
[0089] Где m - масса транспортного средства, Iz - инерция вращения транспортного средства вокруг вертикального направления, If - расстояние от передней оси транспортного средства до центра масс, Ir - расстояние от задней оси транспортного средства до центра масс, Cf - жесткость переднего колеса при прохождении поворотов, и Cr - жесткость заднего колеса при прохождении поворотов, Vx - продольная скорость транспортного средства, k14 - матрица сходимости коэффициента усиления системы управления, k14(1), k14(2), k14(3) и k14(4) - четыре элемента в матрице сходимости коэффициента усиления системы управления, соответственно, k1, k2, k3 и k4 - четыре коэффициента усиления параметра управления, соответственно, k14 - матрица сходимости оптимального коэффициента усиления системы управления, вычисленная с помощью MATLAB, и k1, k2, k3 и k4 - четыре коэффициента усиления параметра управления, соответственно.
[0090] Причем общие параметры транспортного средства включают массу транспортного средства и/или инерцию вращения транспортного средства вокруг вертикального направления и/или расстояние от передней оси транспортного средства до центра масс и/или расстояние от задней оси транспортного средства до центра масс и/или жесткость передних колес при прохождении поворотов и/или жесткость задних колес при прохождении поворотов. Получают общие параметры транспортного средства, получают коэффициент усиления параметра управления в режиме офлайн в соответствии с общими параметрами транспортного средства и уменьшают сложность вычисления способа данного варианта осуществления.
[0091] В соответствии с общими параметрами транспортного средства и моделью управляемого объекта, оптимальные коэффициенты k1, k2, k3 и k4 усиления параметра управления вычисляют в режиме офлайн с помощью функции Iqr в MATLAB, что значительно сокращает объем вычислений по сравнению с решением коэффициента усиления параметров управления в режиме онлайн.
[0092] Вариант осуществления 4
[0093] Как показано на фиг. 3, в дополнение к техническим признакам вышеописанных вариантов осуществления данный вариант осуществления дополнительно включает нижеследующие технические признаки.
[0094] Этап получения коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления включает:
[0095] Этап S202 принятия скорости в качестве независимой переменной и выполнение полиномиальной аппроксимации коэффициента усиления параметра управления для получения первого полинома; и
[0096] Этап S204 получения коэффициента усиления параметра управления в режиме реального времени в соответствии с первым полиномом и продольной скоростью транспортного средства в режиме реального времени.
[0097] Для получения коэффициента усиления параметра управления в режиме реального времени применяют метод вычисления полиномиальной аппроксимации на основе коэффициента усиления параметра управления, полученного в режиме офлайн, и оптимизируют объем вычислений.
[0098] Вариант осуществления 5
[0099] В дополнение к техническим признакам вышеописанных вариантов осуществления данный вариант осуществления дополнительно включает нижеследующие технические признаки.
[0100] Этап получения коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления включает: принятие скорости в качестве независимой переменной и выполнение полиномиальной аппроксимации коэффициента усиления параметра управления третьего порядка, и первый полином получают в виде:
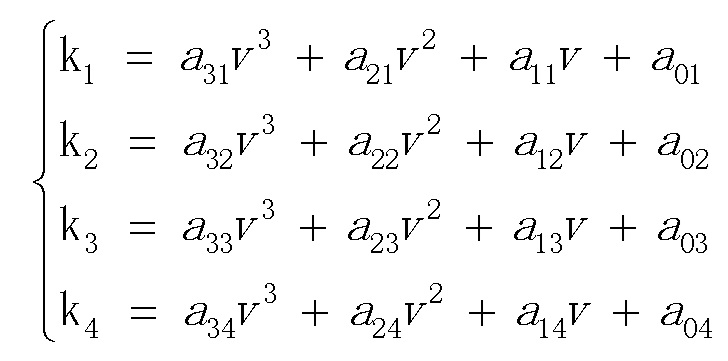
[0101] Где а31, a21, a11 и a01 - полиномиальные коэффициенты параметров k1 управления третьего порядка, а32, a22, a12 и а02 - полиномиальные коэффициенты параметров k2 управления третьего порядка, а33, а23, a13 и а03 - полиномиальные коэффициенты параметров k3 управления третьего порядка, а34, a24, a14 и а04 - полиномиальные коэффициенты параметров k4 управления третьего порядка, v - скорость; получение коэффициента K усиления параметра управления в режиме реального времени в соответствии с первым полиномом и продольной скоростью транспортного средства в режиме реального времени:
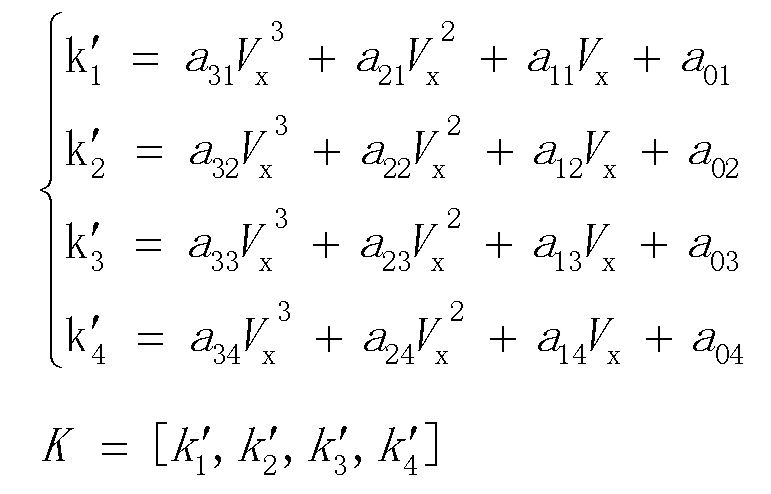
[0102] Где Vx - продольная скорость транспортного средства.
[0103] В данном варианте осуществления применяют полиномиальную аппроксимацию третьего порядка и оптимальный коэффициент усиления параметра управления вычисляют в режиме реального времени в соответствии с фактической скоростью, передаваемой обратно транспортным средством, что не только уменьшает объем вычислений оптимального коэффициента усиления параметра управления, но также обеспечивает сходимость и надежность оптимального коэффициента усиления параметра управления.
[0104] Вариант осуществления 6
[0105] В дополнение к техническим признакам вышеописанных вариантов осуществления данный вариант осуществления дополнительно включает нижеследующие технические признаки.
[0106] Этап получения величины обратной связи по ошибке состояния включает:
[0107] получение величины обратной связи по ошибке состояния в соответствии со следующей формулой:
[0108] Где ey - отклонение бокового положения,  - скорость изменения отклонения бокового положения, eψ - отклонение курсового угла,
- скорость изменения отклонения бокового положения, eψ - отклонение курсового угла,  - скорость изменения отклонения курсового угла, X - величина обратной связи по ошибке состояния, Vx - продольная скорость транспортного средства, Vy - боковая скорость транспортного средства, (x,y) - положение транспортного средства в текущий момент, (xdes,ydes) - желаемое положение траектории, ψ - курсовой угол транспортного средства в текущий момент, ψdes - курсовой угол желаемой траектории, ω - скорость рыскания транспортного средства, и ρ - кривизна желаемой целевой точки.
- скорость изменения отклонения курсового угла, X - величина обратной связи по ошибке состояния, Vx - продольная скорость транспортного средства, Vy - боковая скорость транспортного средства, (x,y) - положение транспортного средства в текущий момент, (xdes,ydes) - желаемое положение траектории, ψ - курсовой угол транспортного средства в текущий момент, ψdes - курсовой угол желаемой траектории, ω - скорость рыскания транспортного средства, и ρ - кривизна желаемой целевой точки.
[0109] За счет обновления ошибки состояния и передачи ее обратно в коэффициент усиления системы управления эффект бокового управления становится более точным.
[0110] Вариант осуществления 7
[0111] Как показано на фиг. 4, в дополнение к техническим признакам вышеописанных вариантов осуществления данный вариант осуществления дополнительно включает нижеследующие технические признаки.
[0112] Этап получения управляющей величины и компенсирующей величины в соответствии с коэффициентом усиления параметра управления, коэффициентом усиления параметра управления в режиме реального времени, ошибкой состояния, кривизной траектории и углом наклона транспортного средства включает:
[0113] Этап S302 получения управляющей величины обратной связи в соответствии с коэффициентом усиления параметра управления в режиме реального времени и величиной обратной связи по ошибке состояния, составляющей:
δsw_b=-KX
[0114] где K - коэффициент усиления параметра управления в режиме реального времени, X - величина обратной связи по ошибке состояния;
[0115] Этап S304 получения управляющей величины суммарной ошибки положения в соответствии с суммарной ошибкой положения, составляющей:

[0116] где ki - коэффициент суммирования, ey - отклонение бокового положения, Т - период управления,  - величина периода управления предыдущего цикла of δsw_i;
- величина периода управления предыдущего цикла of δsw_i;
[0117] Этап S306 получения величины упреждающей компенсации кривизны дороги в соответствии с кривизной траектории, составляющей:

[0118] где m - масса транспортного средства, Vx - продольная скорость транспортного средства, If - расстояние от передней оси транспортного средства до центра масс, Ir - расстояние от задней оси транспортного средства до центра масс, Cf - жесткость переднего колеса при прохождении поворотов, Cr - жесткость заднего колеса при прохождении поворотов, Rdes - радиус траектории, L - сумма If и Ir;
[0119] Этап S308 получения величины упреждающей компенсации уклона дороги в соответствии углом наклона транспортного средства, составляющей:

[0120] где A(i,j) параметр, соответствующий i-й строке и j-му столбцу матрицы А, B(i,j) - параметр, соответствующий i-й строке и j-му столбцу матрицы В, g - ускорение силы тяжести, γ - угол наклона транспортного средства.
[0121] Конкретные способы получения управляющей величины обратной связи, управляющей величины суммарной ошибки положения, величины упреждающей компенсации кривизны дороги, величины упреждающей компенсации уклона дороги представлены вышеупомянутыми формулами. В данном варианте осуществления кривизна дороги, определяемая желаемой траекторией, используется для выполнения упреждающей компенсации кривизны дороги, информация о положении используется для выполнения упреждающей компенсации уклона дороги и вводится элемент суммарного отклонения положения для уменьшения ошибки положения. И всесторонне учитывается влияние неопределенности кривизны дороги, уклона дороги и общих параметров транспортного средства для достижения высокой надежности и высокой точности отслеживания желаемой траектории движения.
[0122] Данный вариант осуществления вводит элемент суммарного отклонения положения для уменьшения ошибки положения, чтобы гарантировать, что ошибка установившегося режима все же может быть полностью устранена, если общие параметры транспортного средства не определены.
[0123] Вариант осуществления 8
[0124] В дополнение к техническим признакам вышеописанных вариантов осуществления данный вариант осуществления дополнительно включает нижеследующие технические признаки.
[0125] Этап получения ожидаемого угла поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной, и вывод ожидаемого угла поворота рулевого колеса в систему рулевого управления по проводам включает:
[0126] получение ожидаемого угла поворота рулевого колеса в соответствии со следующей формулой:

[0127] Где δsw_b - управляющая величина обратной связи, δsw_i - управляющая величина суммарной ошибки положения, δsw_c - величина упреждающей компенсации кривизны дороги, δsw_r величина упреждающей компенсации уклона дороги, I - передаточное отношение рулевого колеса.
[0128] В соответствии с результатами расчета управляющей величины обратной связи, величины упреждающей компенсации кривизны дороги, величины упреждающей компенсации уклона дороги и управляющей величины суммарного положения, результаты вычислений суммируются и затем умножаются на передаточное отношение рулевого колеса для получения окончательного ожидаемого угла поворота рулевого колеса, который выводится в систему рулевого управления по проводам, для обеспечения отслеживания траектории, чтобы гарантировать, что ошибка установившегося режима может быть полностью устранена, когда общие параметры транспортного средства не определены.
[0129] Вариант осуществления 9
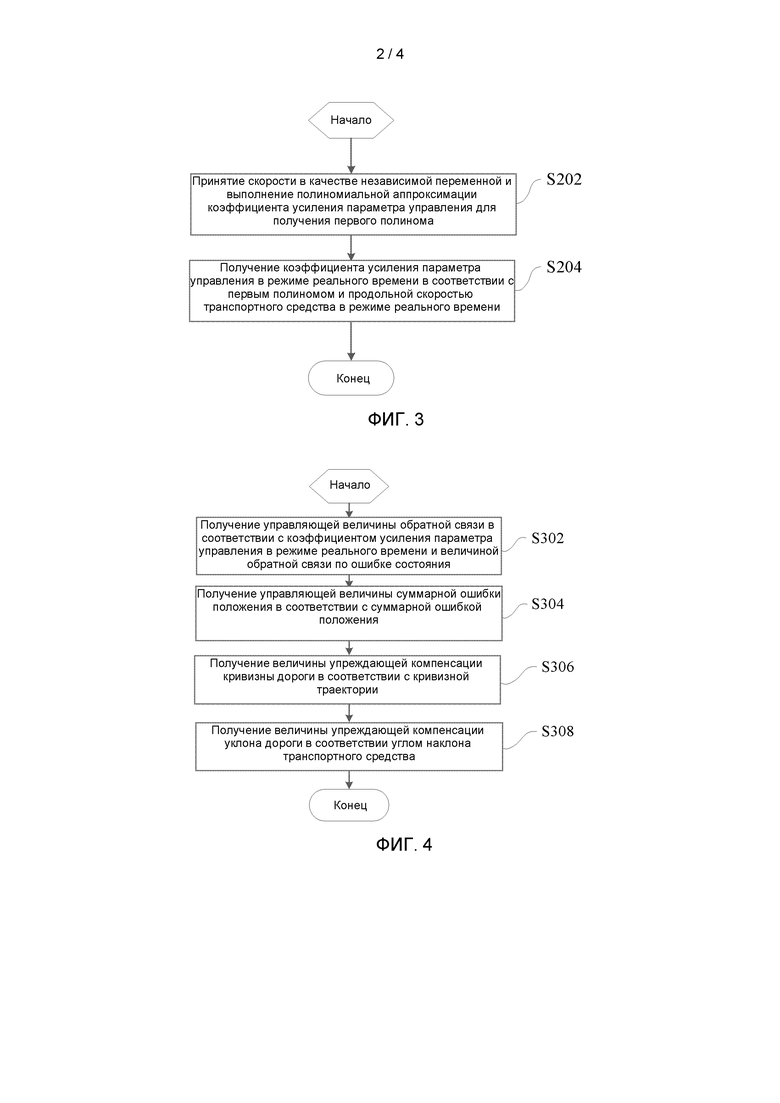
[0130] Как показано на фиг. 5, данный вариант осуществления предусматривает устройство 100 для управления боковым движением самоуправляемого транспортного средства, содержащее: модуль 110 установки; первый модуль 120 получения; второй модуль 130 получения; третий модуль 140 получения; четвертый модуль 150 получения; пятый модуль 160 получения и шестой модуль 170 получения, причем параметры управления линейно-квадратичного регулятора устанавливаются модулем 110 установки, первый модуль 120 получения получает общие параметры транспортного средства, второй модуль 130 получения получает коэффициент усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства, второй модуль 130 получения получает коэффициент усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства, третий модуль 140 получения получает коэффициент усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления, четвертый модуль 150 получения получает ошибку состояния, кривизну траектории и угол наклона транспортного средства, пятый модуль 160 получения получает управляющую величину и компенсирующую величину в соответствии с коэффициентом усиления параметра управления, коэффициентом усиления параметра управления в режиме реального времени, ошибкой состояния, кривизной траектории и углом наклона транспортного средства, шестой модуль 170 получения получает ожидаемый угол поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной и выводит ожидаемый угол поворота рулевого колеса в систему рулевого управления по проводам.
[0131] Данный вариант осуществления позволяет реализовать оптимальное управление боковым движением самоуправляемого транспортного средства без статической ошибки, значительно сократить объем вычислений, обеспечить сходимость оптимального коэффициента усиления системы управления и учитывать влияние кривизны дороги, уклона дороги и неопределенности общих параметров транспортного средства для достижения высокой надежности и высокой точности отслеживания желаемой траектории движения.
[0132] Вариант осуществления 10
[0133] Как показано на фиг. 6, данный вариант осуществления предусматривает самоуправляемое транспортное средство 200, содержащее: корпус 210 транспортного средства и управляющее устройство 220; причем управляющее устройство управляет перемещением корпуса 210 транспортного средства с использованием способа управления боковым движением самоуправляемого транспортного средства, как описано в любом из вариантов осуществления настоящего изобретения.
[0134] Конкретный вариант осуществления
[0135] Данный вариант осуществления обеспечивает способ управления боковым движением самоуправляемого транспортного средства (т.е. оптимальный способ управления без боковой статической ошибки), который может в достаточной степени уменьшить объем вычислений оптимального коэффициента усиления системы управления и обеспечить сходимость коэффициента усиления системы управления, а также учесть влияние неопределенности кривизны дороги, наклона дороги и общих параметров для достижения высокой надежности и высокой точности отслеживания желаемой траектории движения.
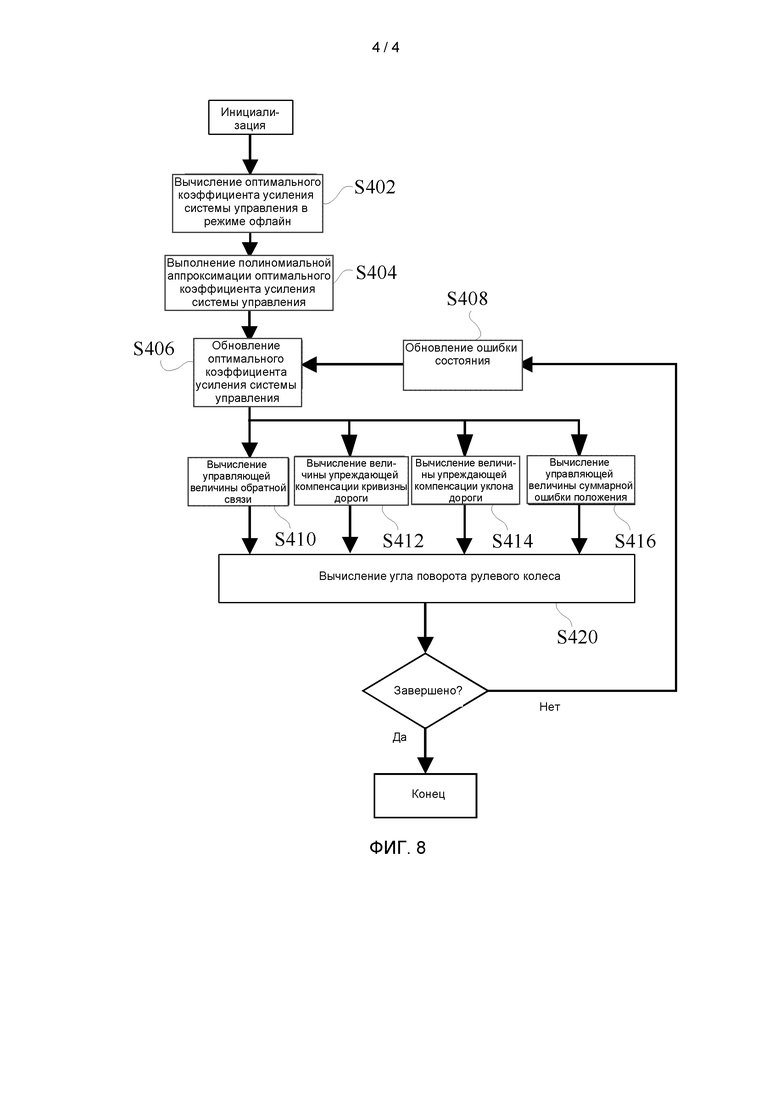
[0136] Как показано на фиг. 7, данный вариант осуществления сначала вычисляет оптимальный коэффициент усиления системы управления в режиме офлайн, затем использует полином для подбора коэффициента усиления системы управления и сохраняет его в вычислительном блоке, и затем обновляет оптимальный коэффициент усиления системы управления и величину ошибки состояния в режиме реального времени в соответствии со скоростью, передаваемой обратно транспортным средством. Кривизна дороги упреждающе компенсируется кривизной дороги, определяемой желаемой траекторией, а уклон дороги упреждающе компенсируется углом наклона транспортного средства, полученным из информации о позиционировании. Кроме того, вводится элемент суммарного отклонения положения для уменьшения ошибки положения, чтобы гарантировать, что ошибка установившегося режима все же может быть полностью устранена, если общие параметры транспортного средства не определены. Как показано на фиг. 8, этапы реализации следующие:
[0137] Этап S402 вычисления оптимального коэффициента усиления системы управления в режиме офлайн и весовой матрицы, при этом параметры управления, задействованные в LQR-регуляторе бокового движения, содержат первую весовую матрицу Q и вторую весовую матрицу R. В частности, существует Q=diag[q1, q2, q3, q4], R=[r], то есть в общей сложности 5 параметров q1, q2, q3, q4 и r; в соответствии с физическим количеством, связанным с параметрами управления, определяется их важность, и q2, q4 и r задаются как фиксированные значения, только для q1, q3 параметры регулируются в соответствии со скоростью транспортного средства.
[0138] Вычисление в режиме офлайн: в соответствии с общими параметрами транспортного средства и моделью управляемого объекта вычисляют оптимальные коэффициенты k1, k2, k3 и k4 усиления системы управления в режиме офлайн с помощью функции Iqr в MATLAB.
[0139] Этап S404 полиномиальной аппроксимации: выполнение полиномиальной аппроксимации третьего порядка оптимального коэффициента усиления системы управления по скорости в соответствии с результатами расчета оптимального коэффициента усиления системы управления.
[0140] Этап S406 обновления коэффициента усиления: вычисление оптимального коэффициента K усиления системы управления в режиме реального времени в соответствии с фактической скоростью, передаваемой обратно колесным спидометром транспортного средства.
[0141] Этап S408 обновления ошибки состояния: вычисление отклонения бокового положения ey, скорости изменения отклонения бокового положения  , отклонения курсового угла eψ, скорости изменения отклонения курсового угла
, отклонения курсового угла eψ, скорости изменения отклонения курсового угла  , величины X обратной связи по ошибке состояния в соответствии с положением транспортного средства, скоростью и ориентацией, выдаваемой системой позиционирования в режиме реального времени, и ожидаемой информацией о планируемой траектории.
, величины X обратной связи по ошибке состояния в соответствии с положением транспортного средства, скоростью и ориентацией, выдаваемой системой позиционирования в режиме реального времени, и ожидаемой информацией о планируемой траектории.
[0142] Этап S410 вычисления управляющей величины обратной связи: умножение оптимального коэффициента усиления системы управления и величины обратной связи по ошибке состояния для вычисления величины обратной связи по ошибке состояния.
δsw_b=-KX
[0143] Этап S412 вычисления величины упреждающей компенсации кривизны дороги: вычисление компенсирующей величины кривизна дороги в соответствии с кривизной траектории предоставленной системой планирования.

[0144] Этап S414 вычисления величины упреждающей компенсации уклона дороги: вычисление величины упреждающей компенсации уклона дороги в соответствии с углом наклона транспортного средства, предоставленным системой позиционирования.

[0145] Этап S416 вычисления управляющей величины суммарной ошибки положения: ввод суммарной ошибки положения и вычисление величины суммирования, обусловленной ошибкой положения, с использованием инкрементного суммирования.

[0146] Этап S420 вычисления угла поворота рулевого колеса: суммирование результатов вычислений управляющей величины упреждающей компенсации кривизны дороги, величины упреждающей компенсации уклона дороги и управляющей величины суммарного положения, в соответствии с управляющей величиной обратной связи с последующим умножением на передаточное отношение рулевого колеса для получения окончательного ожидаемого угла поворота рулевого колеса и вывод в систему рулевого управления по проводам, реализующую отслеживание траектории.

[0147] В приведенной выше формуле i - передаточное отношение рулевого механизма, m представляет массу транспортного средства; Iz представляет инерцию вращения транспортного средства вокруг вертикального направления; ω представляет скорость рыскания транспортного средства; If и Ir представляют расстояние от передней и задней осей транспортного средства до центра масс соответственно; Cf и Cr - жесткость при прохождении поворотов передних и задних колес соответственно, γ - угол наклона, предоставляемый позиционированием, ψ, ψdes - курсовой угол транспортного средства в текущий момент и курсовой угол желаемой траектории, соответственно, (x,y), (xdes,ydes) - положение транспортного средства в текущий момент и положение ожидаемой траектории, ki - коэффициент суммирования, Т - период управления,  - величина периода управления предыдущего цикла 0f δsw_i, A(i, j), B(i, j) - параметр, соответствующий i-й строке и j-му столбцу матриц А и В, соответственно, и g - ускорение силы тяжести.
- величина периода управления предыдущего цикла 0f δsw_i, A(i, j), B(i, j) - параметр, соответствующий i-й строке и j-му столбцу матриц А и В, соответственно, и g - ускорение силы тяжести.
[0148] Подводя итог, можно сказать, что полезные эффекты вариантов осуществления настоящего изобретения следующие:
[0149] 1. Данный вариант осуществления позволяет реализовать оптимальное управление боковым движением самоуправляемого транспортного средства без статической ошибки, значительно сократить объем вычислений, обеспечить сходимость оптимального коэффициента усиления системы управления и учитывать влияние кривизны дороги, уклона дороги и неопределенности общих параметров транспортного средства для достижения высокой надежности и высокой точности отслеживания желаемой траектории движения.
[0150] 2. Данный вариант осуществления обеспечивает свободный от статических ошибок способ и вводит элемент суммарного отклонения положения для уменьшения ошибки положения, чтобы гарантировать, что ошибка установившегося состояния все же может быть полностью устранена, когда общие параметры транспортного средства неопределенны.
[0151] 3. Вычисляется оптимальный коэффициент усиления системы управления в режиме реального времени в соответствии с фактической скоростью, передаваемой обратно транспортным средством, что не только уменьшает объем вычислений оптимального коэффициента усиления системы управления, но также обеспечивает сходимость и надежность оптимального коэффициента усиления системы управления.
[0152] В этой заявке термины «первый», «второй» и «третий» используются только в описательных целях и не должны толковаться как указывающие или подразумевающие относительную важность; термин «множественность» относится к двум или более двух, если иное прямо не определено. Термины «установленный», «подключенный», «подключение», «фиксированный» и т.д. следует понимать в широком смысле. Например, «подключенный» может быть фиксированным соединением, разъемным соединением или цельным соединением; «соединение» может быть подключено напрямую или подключено не напрямую через промежуточное соединение. Для специалистов в данной области конкретные значения вышеуказанных терминов в настоящем изобретении могут быть поняты в соответствии с конкретными ситуациями.
[0153] В описании настоящего изобретения термин «множество» относится к двум или более, если четко не определено иное, и следует понимать, что отношения ориентации или положения, обозначенные терминами «верхний», «нижний», «левый», «правый» и т.п., являются отношениями ориентации или положения на основе того, что показано на чертежах, приведены просто для удобства описания настоящего изобретения и упрощения описания, и не указывают и не подразумевают, что упомянутое устройство или блок должны иметь определенное направление, и сконструированы и эксплуатируются в определенной ориентации, и, следовательно, не могут рассматриваться как ограничение настоящего изобретения.
[0154] В описании настоящего изобретения описания выражений "один вариант осуществления", "некоторые варианты осуществления" и "конкретные вариант осуществления" и т.п. означают, что конкретные признаки, структуры, материалы или характеристики, описанные в сочетании с вариантом(ами) осуществления или примером (примерами), содержатся по меньшей мере в одном варианте или примере. В спецификации схематическое представление вышеуказанных терминов не обязательно относится к одному и тому же варианту осуществления или примеру. Более того, описанные конкретные признаки, структуры, материалы или характеристики могут быть объединены подходящим образом в любом одном или более вариантах осуществления или примерах.
[0155] Приведенные выше описания являются только предпочтительными вариант осуществления настоящего изобретения, которые не используются для ограничения настоящего изобретения. Для специалиста в данной области настоящее изобретение может иметь различные изменения и вариации. Любые модификации, эквивалентные замены, улучшения и т.д. в духе и принципе настоящего изобретения все должно быть включено в объем охраны настоящего изобретения.
Изобретение относится к самоуправляемым ТС. В способе управления боковым движением самоуправляемого ТС устанавливают параметры управления линейно-квадратичного регулятора; получают общие параметры ТС и коэффициент усиления параметра управления в соответствии с параметрами управления и общими параметрами. Получают коэффициент усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления. Получают величину обратной связи по ошибке состояния, кривизну траектории и угол наклона ТС. Получают управляющую и компенсирующую величины в соответствии с коэффициентом усиления параметра управления в режиме реального времени, величиной обратной связи по ошибке состояния, кривизной траектории и углом наклона ТС. Получают ожидаемый угол поворота рулевого колеса в соответствии с управляющей и компенсирующей величиной и выводят ожидаемый угол поворота рулевого колеса в систему рулевого управления по проводам. Снижается объем вычислений и вычислительных ресурсов. 3 н. и 7 з.п. ф-лы, 8 ил.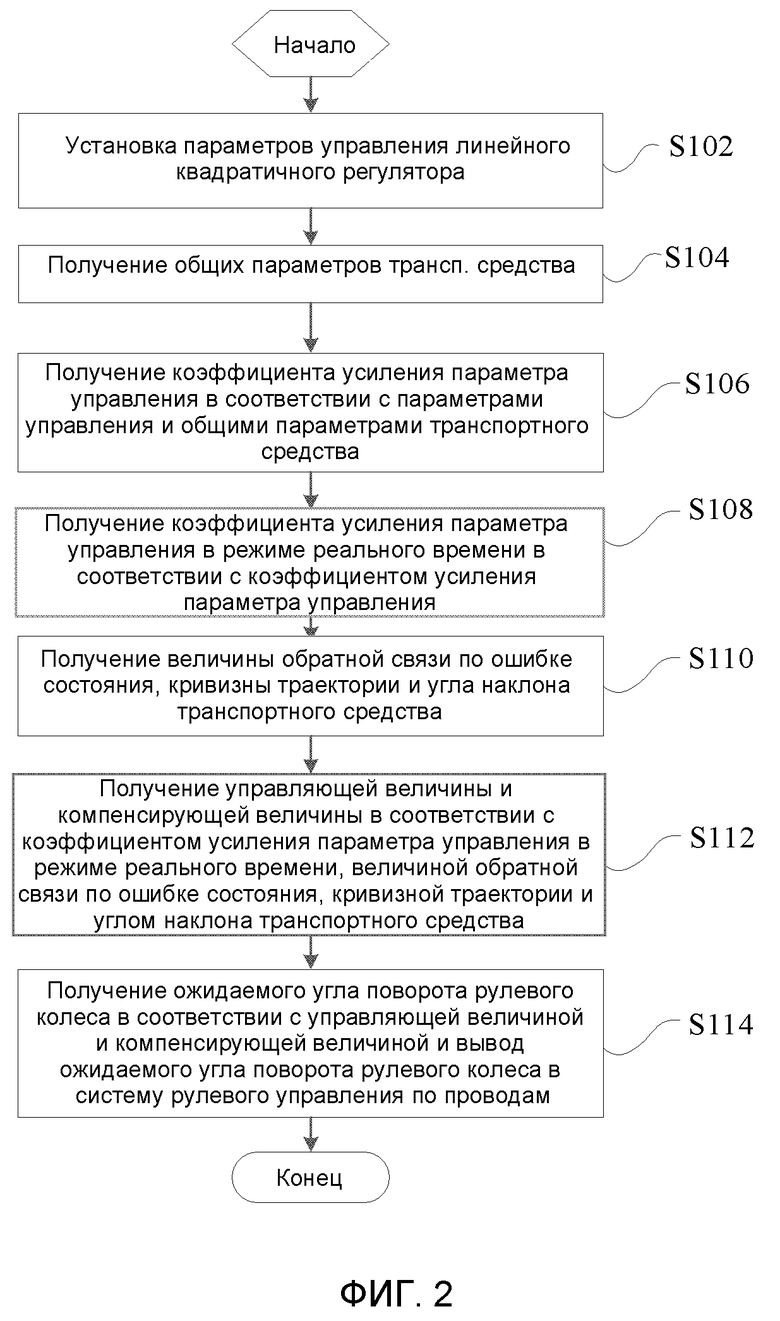
1. Способ управления боковым движением самоуправляемого транспортного средства, включающий:
установку параметров управления линейно-квадратичного регулятора;
получение общих параметров транспортного средства;
получение коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства;
получение коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления;
получение величины обратной связи по ошибке состояния, кривизны траектории и угла наклона транспортного средства;
получение управляющей величины и компенсирующей величины в соответствии с коэффициентом усиления параметра управления в режиме реального времени, величиной обратной связи по ошибке состояния, кривизной траектории и углом наклона транспортного средства; и
получение ожидаемого угла поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной и вывод ожидаемого угла поворота рулевого колеса в систему рулевого управления по проводам.
2. Способ управления боковым движением самоуправляемого транспортного средства по п. 1, в котором этап установки параметров управления линейно-квадратичного регулятора включает:
параметры управления включают первую весовую матрицу Q и вторую весовую матрицу R, Q=diag[q1, q2, q3, q4], R=[r], где q1, q2, q3, q4 и r представляют собой пять параметров управления, соответственно, причем q2, q4 и r устанавливают на фиксированные значения, a q1, q3 получают в соответствии со следующей формулой:
где q1max - максимальное значение q1, q1min - минимальное значение q1, q3max - максимальное значение q3, q3min - минимальное значение q3, Vx - продольная скорость транспортного средства, V1 - первое пороговое значение скорости и V2 - второе пороговое значение скорости.
3. Способ управления боковым движением самоуправляемого транспортного средства по п. 1, в котором этап получения коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства включает:
коэффициент усиления параметра управления получают в соответствии со следующей формулой:
где m - масса транспортного средства, Iz - инерция вращения транспортного средства вокруг вертикального направления, lf - расстояние от передней оси транспортного средства до центра масс, lr - расстояние от задней оси транспортного средства до центра масс, Cf - жесткость переднего колеса при прохождении поворотов и Cr - жесткость заднего колеса при прохождении поворотов, Vx продольная скорость транспортного средства, k14 - матрица сходимости коэффициента усиления системы управления, k14(1), k14(2), k14(3) и k14(4) - четыре элемента в матрице сходимости коэффициента усиления системы управления, соответственно, k1, k2, k3 и k4 - четыре коэффициента усиления параметра управления, соответственно.
4. Способ управления боковым движением самоуправляемого транспортного средства по п. 1, в котором этап получения коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления включает:
принятие скорости в качестве независимой переменной и выполнение полиномиальной аппроксимации коэффициента усиления параметра управления для получения первого полинома; и
получение коэффициента усиления параметра управления в режиме реального времени в соответствии с первым полиномом и продольной скоростью транспортного средства в режиме реального времени.
5. Способ управления боковым движением самоуправляемого транспортного средства по п. 4, в котором этап получения коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления включает:
принятие скорости в качестве независимой переменной и выполнение полиномиальной аппроксимации коэффициента усиления параметра управления третьего порядка, и первый полином получают в виде:
где a31, a21, a11 и a01 - полиномиальные коэффициенты параметров k1 управления третьего порядка, a32, а22, а12 и а02 - полиномиальные коэффициенты параметров k2 управления третьего порядка, а33, а23, a13 и а03 - полиномиальные коэффициенты параметров k3 управления третьего порядка, а34, a24, а14 и а04 - полиномиальные коэффициенты параметров k4 управления третьего порядка, v - скорость;
получение коэффициента K усиления параметра управления в режиме реального времени в соответствии с первым полиномом и продольной скоростью транспортного средства в режиме реального времени:
где Vx - продольная скорость транспортного средства.
6. Способ управления боковым движением самоуправляемого транспортного средства по п. 1, в котором этап получения величины обратной связи по ошибке состояния включает:
получение величины обратной связи по ошибке состояния в соответствии со следующей формулой:
где еу - отклонение бокового положения,  - скорость изменения отклонения бокового положения, eψ - отклонение курсового угла,
- скорость изменения отклонения бокового положения, eψ - отклонение курсового угла,  - скорость изменения отклонения курсового угла, X - величина обратной связи по ошибке состояния, Vx - продольная скорость транспортного средства, Vy - боковая скорость транспортного средства, (x,у) - положение транспортного средства в текущий момент, (xdes,ydes) - желаемое положение траектории, ψ - курсовой угол транспортного средства в текущий момент, ψdes - курсовой угол желаемой траектории, ω представляет скорость рыскания транспортного средства, и ρ представляет кривизну желаемой целевой точки.
- скорость изменения отклонения курсового угла, X - величина обратной связи по ошибке состояния, Vx - продольная скорость транспортного средства, Vy - боковая скорость транспортного средства, (x,у) - положение транспортного средства в текущий момент, (xdes,ydes) - желаемое положение траектории, ψ - курсовой угол транспортного средства в текущий момент, ψdes - курсовой угол желаемой траектории, ω представляет скорость рыскания транспортного средства, и ρ представляет кривизну желаемой целевой точки.
7. Способ управления боковым движением самоуправляемого транспортного средства по п. 1, в котором этап получения управляющей величины и компенсирующей величины в соответствии с коэффициентом усиления параметра управления, коэффициентом усиления параметра управления в режиме реального времени, ошибкой состояния, кривизной траектории и углом наклона транспортного средства включает:
получение управляющей величины обратной связи в соответствии с коэффициентом усиления параметра управления в режиме реального времени и величиной обратной связи по ошибке состояния, составляющей:
δsw_b = -KX,
где K - коэффициент усиления параметра управления в режиме реального времени, X - величина обратной связи по ошибке состояния;
получение управляющей величины суммарной ошибки положения в соответствии с суммарной ошибкой положения, составляющей:
 ,
,
где ki - коэффициент суммирования, ey - отклонение бокового положения, Т - период управления,  - величина периода управления предыдущего цикла, составляющая δsw_i;
- величина периода управления предыдущего цикла, составляющая δsw_i;
получение величины упреждающей компенсации кривизны дороги в соответствии с кривизной траектории, составляющей:
 ,
,
где m - масса транспортного средства, Vx - продольная скорость транспортного средства, lf - расстояние от передней оси транспортного средства до центра масс, lr - расстояние от задней оси транспортного средства до центра масс, Cf - жесткость переднего колеса при прохождении поворотов, Cr - жесткость заднего колеса при прохождении поворотов, Rdes - радиус траектории, L - сумма lf и lr; и
получение величины упреждающей компенсации уклона дороги в соответствии с углом наклона транспортного средства, составляющей:
 ,
,
где A(i,j) - параметр, соответствующий i-й строке и j-му столбцу матрицы A, B(i,j) - параметр, соответствующий i-й строке и j-му столбцу матрицы В, g - ускорение силы тяжести, γ - угол наклона транспортного средства.
8. Способ управления боковым движением самоуправляемого транспортного средства по п. 1, в котором этап получения ожидаемого угла поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной и вывод ожидаемого угла поворота рулевого колеса в систему рулевого управления по проводам включает:
получение ожидаемого угла поворота рулевого колеса в соответствии со следующей формулой:
 ,
,
где δsw_b - управляющая величина обратной связи,  - управляющая величина суммарной ошибки положения,
- управляющая величина суммарной ошибки положения,  - величина упреждающей компенсации кривизны дороги, δsw_r - величина упреждающей компенсации уклона дороги, I - передаточное отношение рулевого колеса.
- величина упреждающей компенсации кривизны дороги, δsw_r - величина упреждающей компенсации уклона дороги, I - передаточное отношение рулевого колеса.
9. Устройство (100) для управления боковым движением самоуправляемого транспортного средства, содержащее:
модуль (110) установки;
первый модуль (120) получения;
второй модуль (130) получения;
третий модуль (140) получения;
четвертый модуль (150) получения;
пятый модуль (160) получения и
шестой модуль (170) получения,
причем параметры управления линейно-квадратичного регулятора устанавливаются модулем (110) установки,
первый модуль (120) получения выполнен с возможностью получения общих параметров транспортного средства;
второй модуль (130) получения выполнен с возможностью получения коэффициента усиления параметра управления в соответствии с параметрами управления и общими параметрами транспортного средства;
третий модуль (140) получения выполнен с возможностью получения коэффициента усиления параметра управления в режиме реального времени в соответствии с коэффициентом усиления параметра управления;
четвертый модуль (150) получения выполнен с возможностью получения ошибки состояния, кривизны траектории и угла наклона транспортного средства;
пятый модуль (160) получения выполнен с возможностью получения управляющей величины и компенсирующей величины в соответствии с коэффициентом усиления параметра управления, коэффициентом усиления параметра управления в режиме реального времени, ошибкой состояния, кривизной траектории и углом наклона транспортного средства; и
шестой модуль (70) получения выполнен с возможностью получения ожидаемого угла поворота рулевого колеса в соответствии с управляющей величиной и компенсирующей величиной и вывода ожидаемого угла поворота рулевого колеса в систему рулевого управления по проводам.
10. Самоуправляемое транспортное средство (200), содержащее:
корпус (210) транспортного средства;
управляющее устройство (220);
причем управляющее устройство (220) выполнено с возможностью управления перемещением корпуса (210) транспортного средства с использованием способа управления боковым движением самоуправляемого транспортного средства по любому из пп. 1-8.
| CN 110568758 A, 13.12.2019 | |||
| CN 109683614 A, 26.04.2019 | |||
| CN 110979305 A, 10.04.2020 | |||
| JP 2015217707 A, 07.12.2015. |

