Область техники, к которой относится изобретение
Настоящее изобретение относится к области детекторов непрерывного излучения, предусмотренных для обнаружения несанкционированных предметов или материалов в зоне защищенного доступа.
Уровень техники
В настоящее время представляется необходимым с высокой степенью надежности контролировать попытки внести определенные изделия, например, но не ограничиваясь этим, оружие или взрывные устройства в уязвимые зоны, либо вынести из них.
Поставленная таким образом задача охватывает очень широкий спектр ситуаций, в том числе, но не ограничиваясь этим, попытку ввоза изделий в защищенную зону, такую как магазин, школа, вокзал, государственная или частная организация, или попытку вывоза изделий за пределы определенного периметра, например, в случае кражи с предприятия или защищенной территории.
В частности, в течение многих лет использовались арочные металлодетекторы непрерывного излучения (англ. "continuous wave"), т.е. арочные металлодетекторы, использующие волны постоянной амплитуды и частоты, обычно в диапазоне частот 70-50 кГц, в отличие от импульсных детекторов, которые работают во временной области и используют "импульсы" магнитного поля длительностью прибл. 100-500 пс и приемник для контроля ослабления магнитного поля.
Общая структура и функционирование такого оборудования непрерывного излучения хорошо известны специалистам в данной области. По сути, арочный металлодетектор состоит из передающего узла, расположенного в первой колонне и содержащего передающие катушки, которые генерируют магнитное поле, и приемного узла, расположенного во второй колонне и содержащего приемные катушки, которые обнаруживают возмущения этого поля из-за металлических предметов, переносимых лицом, проходящим через арочный металлодетектор. Первая и вторая колонны соединены вместе поперечиной, на которой могут находиться дополнительные принадлежности, например, камера, звуковая и/или визуальная сигнализация. Примеры таких арочных металлодетекторов можно найти в ЕР 1750147 и ЕР 1892542.
Питание и управление передающих и приемных катушек обеспечивает электронный блок управления. Для того чтобы обеспечить демодулирование (детектирование) сигнала, принимаемого приемными катушками, и обнаружить с меньшим числом ложных срабатываний металлические предметы, проносимые через арочный металлодетектор, управляющие сигналы передающих катушек должны иметь одинаковую частоту и фазу, когерентную частоте и фазе демодулирующих сигналов приемных катушек. Это требование выполняется за счет использования одного и того же тактового генератора для определения электрических сигналов, передаваемых на передающие катушки, и для демодуляции электрических сигналов, передаваемых приемными катушками, а также за счет проводного подсоединения блока управления одновременно к передающему узлу и приемному узлу.
Однако в нынешней обстановке, характеризующейся различными нападениями в общественных местах, необходима возможность быстрого развертывания контрольно-пропускных пунктов и постов безопасности, позволяющих обнаруживать оружие при входе в общественные места, такие как стадионы, концертные залы, торговые центры и т.д. Действительно, наблюдение за этими общественными местами требует быстрой установки и демонтажа досмотрового оборудования, поскольку вход в эти общественные места часто служит также аварийным выходом, поэтому необходима возможность мгновенного устранения всех препятствий (в том числе досмотрового оборудования).
Однако традиционные арочные металлодетекторы не подходят для таких ситуаций, поскольку их установка и демонтаж требуют систематической сборки и разборки компонентов. То есть необходимо привезти и смонтировать две колонны, перекладину, а также интерфейс управления на месте досмотра, а затем разобрать их, уложить в ящик для хранения и увезти после завершения досмотра.
Ранее уже были предложения поставлять арочные металлодетекторы в собранном виде и хранить их на специальных тележках, чтобы сократить время монтажа. Однако такое решение является неосуществимым, когда общественное место большое или когда оно не имеет подходящей зоны для хранения громоздких тележек и предварительно собранных арочных металлодетекторов.
Раскрытие сущности изобретения
Целью изобретения является создание системы обнаружения на основе непрерывного излучения для обнаружения металлических предметов, которая может быть быстро развернута и демонтирована на заданной площади, обеспечивая при этом эффективное обнаружение металлических предметов с уменьшенным количеством ложных срабатываний.
С этой целью, согласно первому аспекту изобретения, предложена система обнаружения на основе непрерывного излучения для обнаружения металлических предметов, содержащая передающий узел и приемный узел, причем:
- передающий узел содержит по меньшей мере одну передающую катушку, расположенную в первой колонне, первый тактовый генератор, выполненный с возможностью излучения первого электрического сигнала с первой заданной частотой, по меньшей мере один первый генератор частоты, выполненный с возможностью передачи на соответствующую передающую катушку электрического сигнала, имеющего частоту, синхронизированную с первой частотой, так что передающая катушка излучает магнитное поле,
- приемный узел содержит:
- по меньшей мере одну приемную катушку, расположенную во второй колонне, отдельной от первой колонны, причем указанная приемная катушка выполнена с возможностью выдачи электрического сигнала в зависимости от магнитного поля, излучаемого передающей катушкой, второй тактовый генератор, выполненный с возможностью излучения второго сигнала со второй заданной частотой, и по меньшей мере один второй генератор частоты, выполненный с возможностью определения электрического сигнала, имеющего частоту, синхронизированную со второй частотой, и
- сравнивающее устройство для сравнения электрического сигнала, выдаваемого приемной катушкой, с электрическим сигналом, определяемым вторым генератором частоты.
Кроме того, система содержит:
- детектор, выполненный с возможностью обнаружения момента пересечения нуля набором электрических сигналов, передаваемых по меньшей мере одним первым генератором частоты или по меньшей мере одним вторым генератором частоты,
- генератор сигналов, выполненный с возможностью генерирования сигнала фазового выравнивания, синхронизированного с моментом пересечения нуля, обнаруженного детектором, и
- передающие средства, содержащие беспроводной коммуникационный интерфейс и выполненные с возможностью передачи на передающий узел или приемный узел соответствующего сигнала фазового выравнивания для фазового выравнивания первого тактового генератора и второго тактового генератора.
Ниже приведены некоторые предпочтительные, но не ограничивающие признаки раскрытой выше системы обнаружения на основе непрерывного излучения, по отдельности или в комбинации:
- вторая заданная частота по существу равс первой заданной частотой,
- первый тактовый генератор размещен в первой колонне, а второй тактовый генератор - во второй колонне,
- первый тактовый генератор и второй тактовый генератор перемещены за пределы первой колонны и второй колонны,
- детектор выполнен с возможностью обнаружения момента пересечения нуля набором электрических сигналов, передаваемых первым генератором частоты или вторым генератором частоты, когда указанные сигналы имеют положительный наклон.
- первая колонна отделена от второй колонны так, что система обнаружения не имеет физического соединения между первой и второй колонной.
- передающий узел содержит по меньшей мере две передающие катушки и столько же соответствующих первых генераторов частоты, приемный узел содержит по меньшей мере две приемные катушки и столько же соответствующих вторых генераторов частоты.
- беспроводной коммуникационный интерфейс содержит по меньшей мере один из следующих элементов: радиочастотный интерфейс, оптический интерфейс и/или индуктивный интерфейс. И/или
беспроводной коммуникационный интерфейс представляет собой индуктивный интерфейс, который содержит по меньшей мере одну из передающих катушек и приемных катушек передающего узла и приемного узла, соответственно.
Согласно второму аспекту, изобретение предлагает способ обнаружения металлических предметов с помощью системы обнаружения на основе непрерывного излучения, как раскрыто выше, указанный способ включает следующие этапы:
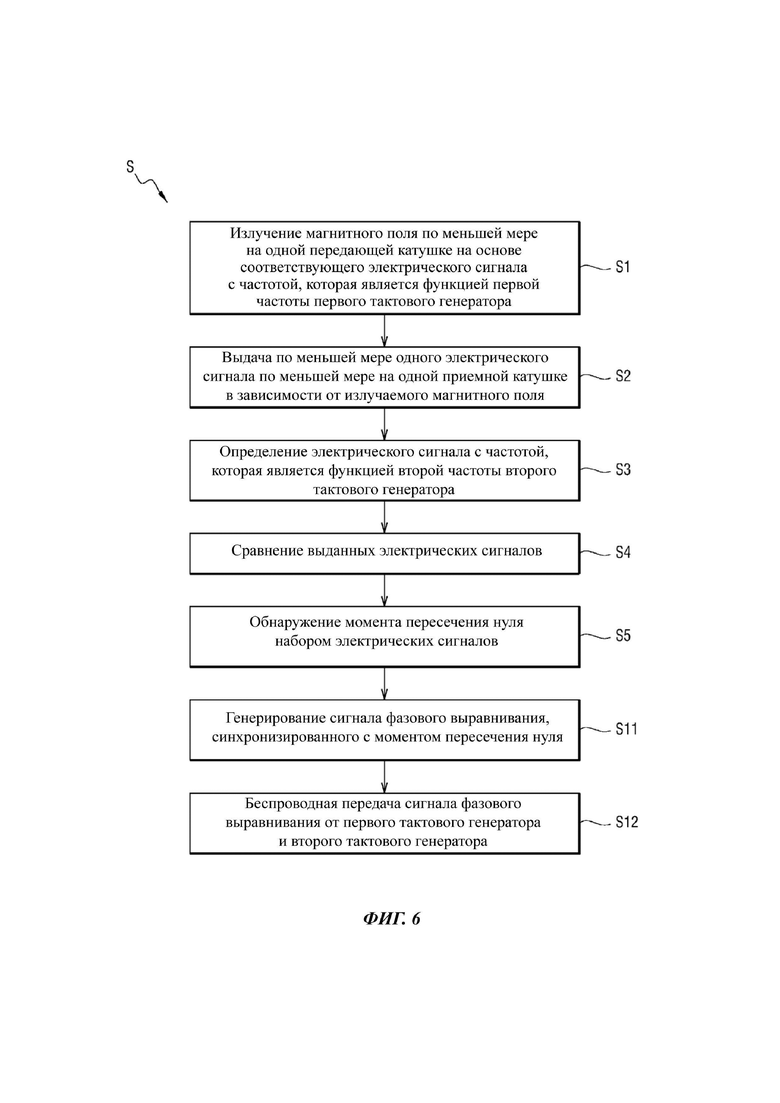
S1: излучение магнитного поля по меньшей мере на одной передающей катушке на основе соответствующего электрического сигнала, имеющего частоту, которая является функцией первой частоты первого тактового генератора;
S2: выдача по меньшей мере одного электрического сигнала по меньшей мере на одной приемной катушке в зависимости от магнитного поля, излучаемого на этапе S1;
S3: определение электрического сигнала, имеющего частоту, которая является функцией второй частоты второго тактового генератора:
S4: сравнение электрического сигнала, выданного на этапе S2, и электрического сигнала, определенного на этапе S3;
S5: обнаружение момента пересечения нуля набором электрических сигналов, частота которых является функцией первой частоты, или набором электрических сигналов, частота которых является функцией второй частоты;
S6: генерирование сигнала фазового выравнивания, синхронизированного с моментом пересечения нуля, обнаруженным на этапе S5, и
S7: передача с помощью беспроводного коммуникационного интерфейса сигнала фазового выравнивания первого тактового генератора и второго тактового генератора на передающий узел или приемный узел.
Ниже приведены некоторые предпочтительные, но не ограничивающие признаки способа, по отдельности или в комбинации:
- этапы S2 и S3 выполняются одновременно.
- на этапе S5, момент пересечения нуля обнаруживается, когда набор электрических сигналов, частота которых является функцией первой частоты, или набор электрических сигналов, частота которых является функцией второй частоты, имеют положительный наклон.
- на этапе S6 сигнал фазового выравнивания генерируется на передающем узле и передается на приемный узел, чтобы выровнять фазу второго тактового генератора с фазой первого тактового генератора. И/или
- на этапе S6 сигнал фазового выравнивания генерируется на приемном узле и передается на передающий узел, чтобы выровнять фазу первого тактового генератора с фазой второго тактового генератора.
Краткое описание чертежей
Дополнительные признаки, цели и преимущества изобретения будут очевидны из следующего раскрытия, которое является исключительно иллюстративным и не ограничивающим, и которое следует рассматривать в сочетании с прилагаемыми чертежами, на которых:
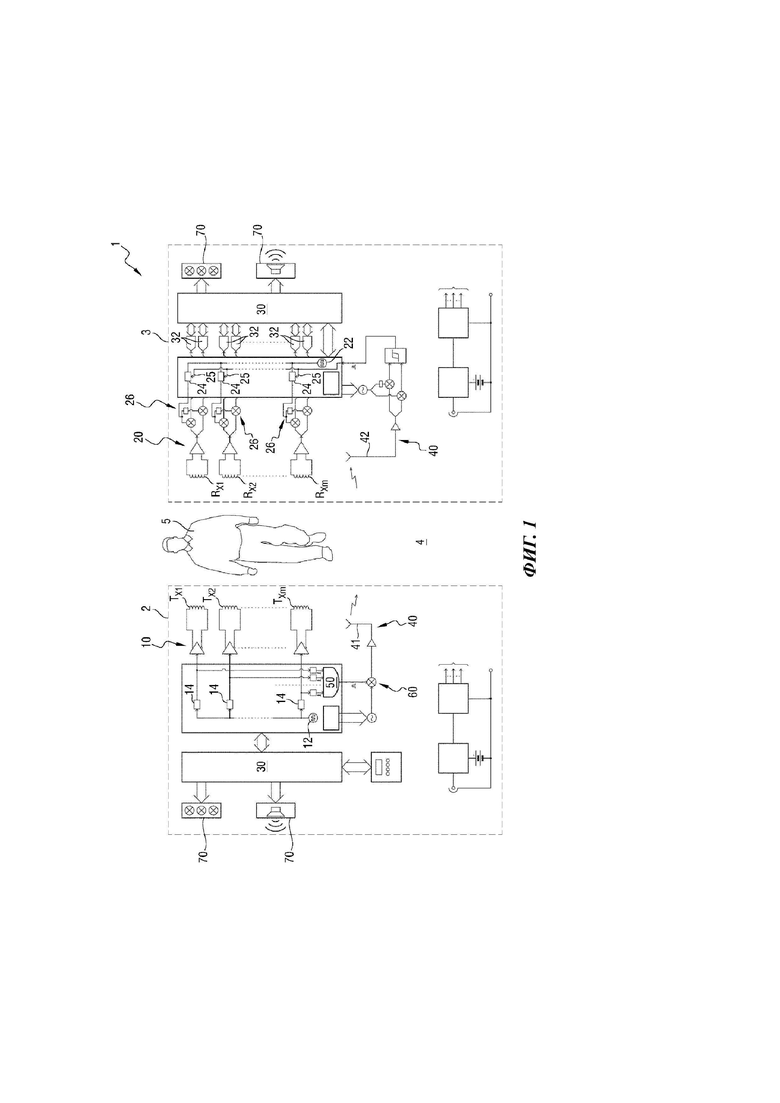
На фиг.1 схематически показана система обнаружения в соответствии с первым вариантом осуществления изобретения;
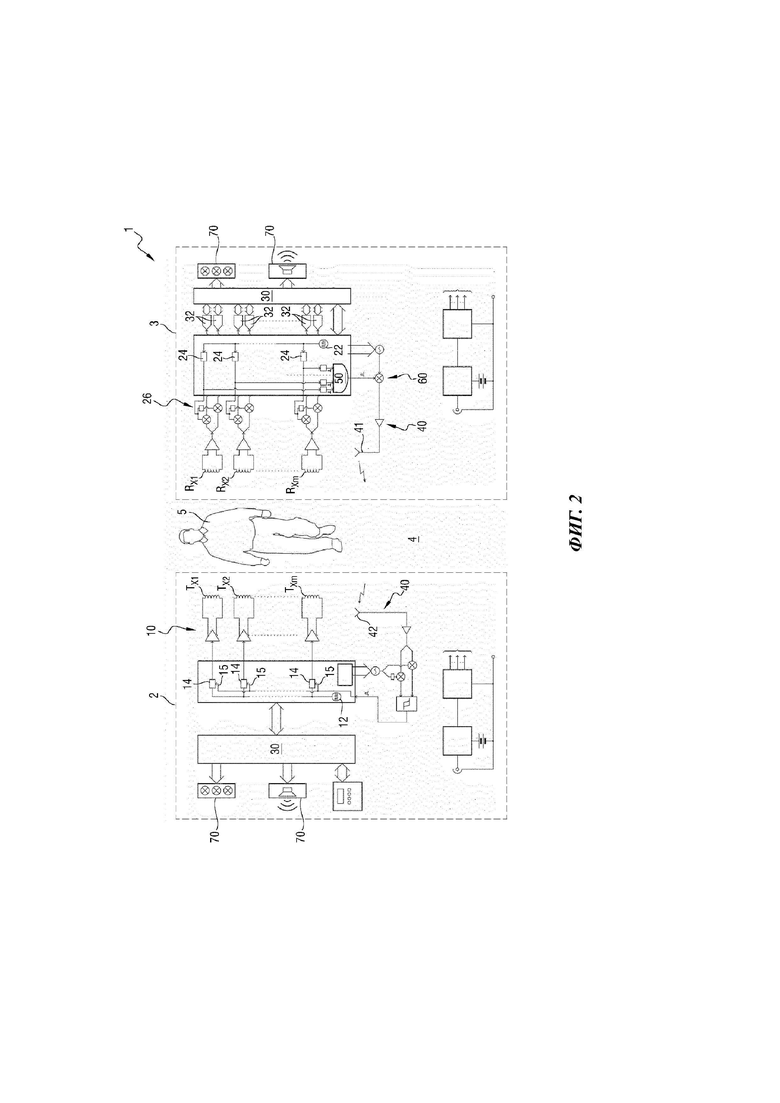
На фиг.2 схематично показана система обнаружения в соответствии со вторым вариантом осуществления изобретения;
На фиг.3 показана частота электрического сигнала, передаваемого на три передающие катушки, соответствующие импульсы, получаемые на входе детектора, а также импульсы, генерируемые генератором сигналов в соответствии с одним из примеров осуществления системы обнаружения согласно изобретению.
На фиг.4 показаны синусоидальные частоты трех электрических сигналов с фиг.3, а также момент пересечения нуля с положительным наклоном для этих трех электрических сигналов.
На фиг.5 показан пример узла обнаружения, содержащего три системы обнаружения в соответствии с изобретением, и
На фиг.6 показана блок-схема этапов процесса обнаружения в соответствии с одним из вариантов осуществления изобретения.
На всех чертежах аналогичные элементы имеют одинаковые ссылки.
Осуществление изобретения
На прилагаемых чертежах, в частности на фиг.1, показана система обнаружения на основе непрерывного излучения в соответствии с настоящим изобретением, содержащая две колонны 2, 3, определяющие между собой канал 4, по которому могут проходить лица 5, подлежащие контролю. В качестве неограничивающего примера, высота колонн 2, 3 может составлять 150-200 см, преимущественно 150-180 см, а расстояние между двумя колоннами 2, 3 преимущественно составляет 70-100 см.
Под колонной 2, 3 здесь понимают любое основание, независимо от его формы, способное вместить средства обнаружения и определить канал прохода для лиц, подлежащих контролю. Таким образом, колонна может также иметь форму по существу цилиндрической или трубчатой стойки, а также панелей, по существу плоских или отграничивающих пространство стрельчатой или эллиптической формы и т.д.
Система 1 обнаружения содержит передающий узел 10, приемный узел 20 и средства 30 анализа. Передающий узел 10 содержит по меньшей мере одну передающую катушку Тх1, …, Txm, расположенную в первой колонне 2 и выполненную с возможностью излучения магнитного поля. Приемный узел 20 содержит по меньшей мере одну приемную катушку Rx1, …, Rxn, расположенную во второй колонне 3, отдельной от первой колонны 2, при этом приемная катушка выполнена с возможностью обнаружения возмущений магнитного поля, вызванных металлическими предметами. Наконец, средства 30 анализа адаптированы для анализа сигналов, исходящих от приемных катушек с целью обнаружения присутствия металлических предметов, переносимых лицом 5, проходящим по указанному каналу, образованному между двумя колоннами 2, 3.
Передающие катушки Тх1, …, Txm и приемные катушки Rx1, …, Rxn предпочтительно расположены по всей высоте колонн 2, 3. Они могут быть объектом многочисленных известных вариантов осуществления, которые используют сегодня в традиционных арочных металлодетекторах. Их функционирование также является традиционным. Поэтому структура и функционирование передающих катушек Тх1, …, Txm и приемных катушек Rx1, …, Rxn ниже подробно не раскрыты. Однако следует отметить, что предпочтительно каждая передающая катушка Тх1, …, Txm или приемная катушка Rx1, …, Rxn может быть образована несколькими отдельными обмотками, относительное распределение которых по высоте колонн 2, 3 адаптировано для оптимизации обнаружения, и регулируется средствами 30 анализа для излучения переменных индуктивных полей в диапазоне частот и для приема всех этих переменных индуктивных полей в указанном диапазоне частот, соответственно.
Предпочтительно индуктивные поля металлодетекторов, генерируемые передающими катушками Тх1, …, Txm и приемными катушками Rx1, …, Rxn, находятся в диапазоне частот 70 Гц-50 кГц, более предпочтительно 100 Гц-50 кГц.
Для того чтобы быстро развернуть и демонтировать систему 1 на контрольно-пропускном пункте, первая колонна 2 и вторая колонна 3 системы 1 являются отдельными и разделенными, то есть они больше физически не связаны друг с другом перекладиной или электрическими кабелями, а сигналы передающего узла 10 и приемного узла 20 выровнены по фазе благодаря беспроводным передающим средствам 40.
Для этого передающий узел 10 дополнительно содержит первый тактовый генератор 12, выполненный с возможностью передачи первого электрического сигнала с первой заданной частотой F1, и по меньшей мере один первый генератор 14 частоты, выполненный с возможностью передачи на соответствующую передающую катушку Тх1, …, Txm электрического сигнала, имеющего частоту, синхронизированную с первой частотой F1, так что передающая катушка Тх1, …, Txm излучает магнитное поле.
Кроме того, приемный узел 20 содержит второй тактовый генератор 22, выполненный с возможностью излучения второго сигнала со второй заданной частотой F2, по существу равной первой заданной частоте F1, и по меньшей мере один второй генератор 24 частоты, выполненный с возможностью определения электрического сигнала, имеющего частоту, синхронизированную со второй частотой F2, а также сравнивающее устройство для сравнения электрического сигнала, выданного приемной катушкой Rx1, …, Rxn, с электрическим сигналом, определенным вторым генератором 24 частоты.
Наконец, система 1 также содержит:
- детектор 50, выполненный с возможностью обнаружения момента пересечения нуля набором электрических сигналов, передаваемых первым генератором 14 частоты или вторым генератором 24 частоты,
- генератор 60 сигналов, выполненный с возможностью генерирования сигнала фазового выравнивания, синхронизированного с моментом пересечения нуля, обнаруженного детектором 50, и
- беспроводные передающие средства 40, выполненные с возможностью передачи на передающий узел 10 или приемный узел 20 сигнала для фазового выравнивания первого тактового генератора 12 и второго тактового генератора 22.
Следует понимать, что первый тактовый генератор 12 и второй тактовый генератор 22 не обязательно расположены в первой колонне 2 и второй колонне 3, но могут быть закреплены снаружи этих колонн 2, 3 или, как вариант, отдельно от указанных колонн 2, 3 и соединены проводным или беспроводным образом с соответствующими генераторами частоты и беспроводными передающими средствами 40.
Ниже для простоты изобретение раскрыто для случая, когда первый тактовый генератор 12 и второй тактовый генератор 22 расположены в первой колонне 2 и во второй колонне 3, соответственно. Кроме того, изобретение раскрыто для случая, когда первый и второй генераторы 14, 24 частоты содержат делители частоты. Однако это не является ограничением, поскольку может быть использовано любое программируемое логическое устройство, способное генерировать синхронизированные частоты, начиная с одного и того же тактового генератора 12, 22.
Первый тактовый генератор 12 и второй тактовый генератор 22 выдают электрические сигналы с первой и второй частотой F1, F2, соответственно. В одном из вариантов осуществления первая частота F1 по существу идентична второй частоте F2. Однако следует отметить, что поскольку частота тактовых генераторов 14, 24 обычно основана на механическом резонансе кристаллов кварца, то первая и вторая частоты F1, F2 обязательно немного отличаются из-за смещения, вызванного колебаниями кристаллов кварца. Это объясняет необходимость фазового выравнивания первого тактового генератора 12 и второго тактового генератора 22 для обеспечения демодуляции сигналов, полученных приемными катушками Rx1, …, Rxn.
Передающий узел 10
Передающий узел 10, расположенный в первой колонне 2 системы 1, содержит по меньшей мере одну передающую катушку Тх1, …, Txm.
Предпочтительно передающий узел 10 содержит несколько передающих катушек Тх1, …, Txm, например, от четырех до десяти.
Каждая передающая катушка Тх1, …, Txm выполнена с возможностью приема электрического сигнала и с возможностью излучения магнитного поля, которое зависит от частоты принятого электрического сигнала. Предпочтительно все частоты электрических сигналов, передаваемых на передающие катушки Тх1, …, Txm, различны, оставаясь при этом субгармоникой первой частоты F1 первого тактового генератора 12. Для этого первый тактовый генератор 12 подсоединен ко всем первым делителям 14 частоты, каждый из которых связан с соответствующей передающей катушкой Тх1, …, Txm и каждый соответствует различной уставке деления N1, …, Nm.
В качестве неограничивающего примера, частота Fi электрического сигнала, полученного данной передающей катушкой Txi (где i находится в диапазоне от 1 до т), равна отношению частоты первого тактового генератора 12 и заранее определенной уставки деления Ni, где уставка деления Ni изменяется от одного делителя 14 частоты к другому. Предпочтительно частоты Fi, генерируемые первыми делителями 14 частоты, отличаются друг от друга (Ni ≠ Nj ∀ (i, j) ∈ [1; m])
Кроме того, каждая передающая катушка Txi может быть возбуждена по меньшей мере одной из этих частот
Fi (i ∈ [1; m]))
Приемный узел 20
Приемный узел 20, расположенный во второй колонне 3 системы 1, содержит по меньшей мере одну приемную катушку Rx1, …, Rxn. Предпочтительно, приемный узел 20 содержит несколько приемных катушек Rx1, …, Rxn, например, от четырех до десяти. Приемный узел 20 может содержать столько приемных катушек Rx1, …, Rxn, сколько передающий узел 10 содержит передающих катушек Тх1, …, Txm, или другое число (m ≠ n).
Каждая приемная катушка Rx1, …, Rxn выполнена с возможностью обнаружения возмущений в магнитном поле, вызванных металлическими предметами, и генерирования электрического сигнала, частота которого зависит от обнаруженного магнитного поля.
Второй тактовый генератор 22 выдает второй электрический сигнал со второй заданной частотой F2. Этот электрический сигнал передается на вторые делители 24 частоты, и они генерируют на выходе электрический сигнал, частота которого является субгармоникой второй частоты F2.
Частоты, полученные таким образом вторыми делителями 24 частоты, передаются для каждой приемной катушки Rx1, …, Rxn и каждого второго делителя 24 частоты на соответствующее сравнивающее устройство 26, целью которого является демодуляция электрического сигнала, генерируемого приемной катушкой Rx1, …, Rxn. Для этого сравнивающее устройство 26 сравнивает для каждой приемной катушки Rx1, …, Rxn электрический сигнал, выданный этой приемной катушкой Rx1, …, Rxn, с электрическим сигналом, определенным вторым делителем 24 частоты. Затем эта информация сообщается средствам 30 анализа, которые на ее основании делают вывод, было ли магнитное поле, генерируемое передающим узлом 10, нарушено металлическими предметами.
Например, сравнивающее устройство 26 может содержать вычитающее устройство, выполненное с возможностью различать электрический сигнал, выдаваемый приемной катушкой Rx1, …, Rxn, и электрический сигнал, определенный вторым делителем 24 частоты.
В примере осуществления, показанном на чертежах, сравнивающее устройство 26 содержит смеситель, связанный с каждой катушкой Rx1, …, Rxn, выполненный с возможностью определения синфазной (ln-phase, I) и квадратурной (Q) составляющей электрического сигнала путем смешивания электрического сигнала, выдаваемого приемной катушкой Rx1, …, Rxn, и электрического сигнала, определенного вторым делителем 24 частоты, причем это смешивание достигается путем приложения, с одной стороны, опорной фазы, а с другой стороны, фазового сдвига π/2 к электрическому сигналу, генерируемому соответствующим вторым делителем 24 частоты. Затем эти компоненты поступают на аналого-цифровой преобразователь 32, который преобразует их в цифровые данные и затем передает их на средства 30 анализа.
Следует отметить, что, аналогично передающему узлу 10, частоты, генерируемые вторыми делителями 24 частоты, соответствуют частотам, генерируемым первыми делителями 14 частоты, и что каждая катушка Rx1, …, Rxn может быть демодулирована одной или несколькими из этих частот.
Детектор 50
Детектор 50 выполнен с возможностью обнаружения момента пересечения нуля набором электрических сигналов, передаваемых первым делителем 14 частоты или вторым делителем 24 частоты (см. фиг.3 и 4).
В примере осуществления, показанном на фиг.1, фаза второго тактового генератора 22 выровнена с фазой первого тактового генератора 12. Поэтому детектор 50 принимает набор электрических сигналов, передаваемых первым делителем (первыми делителями) 14 частоты, и определяет момент пересечения нуля этими электрическими сигналами. Как вариант, на фиг.2 фаза первого тактового генератора 12 выровнена с фазой второго тактового генератора 22. Поэтому детектор 50 принимает набор электрических сигналов, передаваемых вторым делителем (вторыми делителями) 24 частоты, и определяет момент пересечения нуля этими электрическими сигналами.
Поскольку электрические сигналы являются синусоидальными (фиг.4), то каждый электрический сигнал последовательно принимает нулевое значение с положительным и отрицательным наклоном. Другими словами, значение сигнала может, например, начинаться с нуля, увеличиваться (положительный наклон) до достижения локального максимума, а затем уменьшаться до достижения локального минимума (отрицательный наклон), пройдя через нуль. Из этого вытекает, что существует несколько моментов пересечения нуля набором электрических сигналов, когда одни сигналы имеют отрицательный наклон, в то время как другие имеют положительный наклон. Чтобы выровнять фазу электрического сигнала второго тактового генератора 22 с фазой электрического сигнала первого тактового генератора 12, детектор 50 выполнен с возможностью обнаружения момента пересечения нуля набором электрических сигналов, передаваемых первым или вторым делителем 14, 24 частоты, когда все эти сигналы имеют положительный наклон. Разумеется, очевидно, что детектор 50, как вариант, также может быть выполнен с возможностью обнаружения момента пересечения нуля этими сигналами, когда все они имеют отрицательный наклон.
Генератор 60 сигналов
Как только этот момент обнаружен, генератор 60 сигналов генерирует сигнал фазового выравнивания. Этот сигнал синхронизирован с моментом пересечения нуля, обнаруженным детектором 50.
В частности, сигнал фазового выравнивания может представлять собой импульс (фиг.3).
Генератор 60 сигналов и детектор 50 предпочтительно расположены в колонне 2, 3, содержащей делители 14, 24 частоты, у которых детектор 50 обнаружил момент пересечения нуля.
Передающие средства 40
Передающие средства 40 содержат коммуникационные интерфейсы 41, 42, выполненные с возможностью передачи на коммуникационный интерфейс передающего узла 10 или приемного узла 20 сигнала фазового выравнивания, чтобы выровнять фазу первого тактового генератора 12 и второго тактового генератора 22. Коммуникационные интерфейсы 41, 42 подсоединены либо к генератору 60 сигналов (когда коммуникационный интерфейс 41 выполнен с возможностью передачи сигнала фазового выравнивания), либо к делителям 14, 24 частоты (когда коммуникационный интерфейс 42 выполнен с возможностью приема сигнала фазового выравнивания). Коммуникационные интерфейсы 41, 42 являются беспроводными, чтобы обеспечить простую и быструю установку системы 1 обнаружения, например, это может быть радиочастотный интерфейс, Wi-Fi, Bluetooth, оптический тип связи (обычно инфракрасный с использованием, например, фотодиодов) или индуктивный и т.д. Следует отметить, что в случае оптической связи Заявитель обнаружил, что возможная временная маскировка инфракрасных беспроводных интерфейсов не наносит ущерба работе системы, поскольку тактовые генераторы 12, 22 остаются очень точными и могут перестраиваться в соответствии со следующим сигналом фазового выравнивания. В тех случаях, когда коммуникационные интерфейсы являются индуктивными, то указанный индуктивный интерфейс может дополнительно содержать по меньшей мере одну из передающих катушек Тх1, …, Txm и приемных катушек Rx1, …, Rxn передающего узла 10 и приемного узла 20, соответственно. Другими словами, индуктивный интерфейс может использовать все или некоторые передающие катушки Тх1, …, Txm и приемные катушки Rx1, …., Rxn системы 1 обнаружения для передачи и приема соответствующего сигнала для фазового выравнивания первого тактового генератора 12 и второго тактового генератора 22.
Например, коммуникационные интерфейсы 41, 42 передающих средств 40 содержат модулятор 41, выполненный с возможностью модуляции несущего сигнала с помощью сигнала фазового выравнивания от генератора для передачи его, например, по радиочастоте, на передающий узел 10 или приемный узел 20, и демодулятор 42, выполненный с возможностью демодуляции несущего сигнала и извлечения сигнала фазового выравнивания, а затем его передачи на приемный узел 20 или передающий узел 10, соответственно.
Затем демодулятор 42 передает этот сигнал выравнивания на набор делителей 14 24, частоты, которыми управляет тактовый генератор 12, 22, фаза которого должна быть выровнена. Как правило, в примере осуществления, показанном на фиг.1, сигнал выравнивания передается на набор вторых делителей 24 частоты. Точнее, сигнал выравнивания передается на вход сброса на нуль вторых делителей 24 частоты, чтобы выровнять их по фазе и таким образом обеспечить фазовую когерентность в системе 1 обнаружения.
Средства 30 анализа
Как было указано ранее, сравнивающее устройство 26, связанное с каждой приемной катушкой Rx1, …, Rxn, передает на средства 30 анализа информацию об электрическом сигнале, генерируемом соответствующей приемной катушкой Rx1, …, Rxn и демодулированном с помощью электрического сигнала, определенного вторым делителем 24 частоты. Затем средства 30 анализа делают вывод, было ли магнитное поле, генерируемое передающим узлом 10, нарушено металлическими предметами.
Когда средства 30 анализа определяют, что магнитное поле было нарушено одним или несколькими металлическими предметами, средства 30 анализа посылают инструкции для генерирования сигнала тревоги (звукового и/или оптического) на один или несколько передатчиков 70 (громкоговоритель, СД (светоизлучающий диод), мигающую лампу и т.д.). Передатчики 70 могут быть расположены во второй колонне 3 и/или в первой колонне 2. Когда сигнальные передатчики 70 полностью или частично расположены в первой колонне 2, инструкции по генерированию сигнала тревоги передаются на передатчики 70 в первой колонне 2 через передающие средства 40 (см. фиг.3).
Средства 30 анализа могут, в частности, содержать компьютер типа процессора, микропроцессора, микроконтроллера и т.д., предусмотренный для выполнения инструкций.
Следует отметить, что коммуникационные интерфейсы 41, 42 передающих средств 40 при необходимости могут быть дополнительно выполнены с возможностью передачи и приема диагностических сигналов или для обеспечения связи системы 1 обнаружения с другой системой 1 обнаружения, аналогичным образом содержащей передающий узел 10, приемный узел 20, детектор 50, генератор 60 сигналов и передающие средства 40. При необходимости настройки систем 1 обнаружения могут быть синхронизированы беспроводным способом благодаря наличию у них коммуникационного интерфейса 41, 42. Например, передающий узел 10 первой системы 1 обнаружения может передавать информацию синхронизации передающему узлу 10 второй системы 1 обнаружения посредством соответствующего коммуникационного интерфейса 41, 42.
Так на фиг.5 показан узел обнаружения, содержащий три системы 1 обнаружения в соответствии с изобретением. Каждая система 1 обнаружения содержит передающий узел 10 и приемный узел 20, каждый из которых в свою очередь содержит коммуникационный интерфейс 41, 42, соответственно, для отправки и приема сигнала фазового выравнивания своих соответствующих тактовых генераторов 12, 22. Кроме того, передающий узел 10 каждой системы 1 обнаружения передает через свой коммуникационный интерфейс 41, 42 информацию о синхронизации на передающий узел соседней системы обнаружения (коммуникационный канал 43).
Способ S обнаружения
Обнаружение металлических предметов с помощью системы 1 обнаружения на основе непрерывного излучения может быть осуществлено, в частности, в соответствии с перечисленными ниже этапами. Ниже изобретение раскрыто для случая, когда передающий узел 10 содержит несколько передающих катушек Тх1, …, Txm, а приемный узел 20 содержит несколько приемных катушек Rx1, …, Rxn. Однако, как говорилось выше, это не является ограничивающим фактором.
На первом этапе S1 передающие катушки Тх1, …, Txm излучают магнитное поле на основе электрического сигнала с частотой, которая является функцией первой частоты F1 первого тактового генератора 12.
Для этого первый тактовый генератор 12 посылает первый электрический сигнал с заданной первой частотой F1 на первые делители 14 частоты. Затем каждый первый делитель 14 частоты делит первую частоту F1 на соответствующую уставку деления Ni, …, Nm. Для каждой передающей катушки Тх1, …, Txm генератор колебаний выдает электрический сигнал, частота которого определяется соответствующим первым делителем 14 частоты, и передает его на передающую катушку Тх1, …, Txm для генерирования магнитного поля.
На втором этапе S2 магнитные поля, излучаемые на этапе S1, индуцируют электрический сигнал в каждой приемной катушке Rx1, …, Rxn.
На третьем этапе S3, который выполняется одновременно со вторым этапом S2, второй тактовый генератор 22 посылает второй электрический сигнал с заданной второй частотой F2 на вторые делители 24 частоты. Затем каждый второй делитель 24 частоты делит вторую частоту F2 на соответствующую уставку деления Ni, …, Nm. Таким образом, для каждой приемной катушки Rx1, …, Rxn генератор колебаний выдает электрический сигнал, частота которого определяется соответствующим вторым делителем 24 частоты.
На четвертом этапе S4 электрический сигнал, индуцированный в каждой приемной катушке Rx1, …, Rxn, сравнивается с электрическим сигналом, определенным соответствующим вторым делителем 24 частоты.
При этом для каждой приемной катушки Rx1, …, Rxn сравнивающее устройство 26 получает на входе электрический сигнал, индуцированный в приемной катушке Rx1, …, Rxn, и электрический сигнал, определенный соответствующим вторым делителем 24 частоты. Затем сравнивающее устройство 26 определяет синфазную (I) и квадратурную (Q) составляющие электрического сигнала.
Синфазные (I) и квадратурные (Q) составляющие каждого определенного таким образом электрического сигнала затем передаются на соответствующий аналого-цифровой преобразователь 32, который преобразует их в цифровые данные и затем передает их на средства 30 анализа.
После чего средства 30 анализа обычным образом делают вывод, не нарушено ли магнитное поле, генерируемое передающим узлом 10, металлическими предметами.
На пятом этапе S5 детектор 50 обнаруживает момент пересечения нуля набором электрических сигналов, частота которых является функцией первой частоты F1, или набором электрических сигналов, частота которых является функцией второй частоты F2.
Когда фаза второго тактового генератора 22 выровнена с фазой первого тактового генератора 12 (фиг.1), на пятом этапе детектор 50 обнаруживает момент пересечения нуля набором электрических сигналов, передаваемых первым делителем (первыми делителями) 14 частоты. Когда фаза первого тактового генератора 12 выровнена с фазой второго тактового генератора 22 (фиг.2), на пятом этапе S5 детектор 50 обнаруживает момент пересечения нуля набором электрических сигналов, передаваемых вторым делителем (вторыми делителями) 24 частоты.
В одном из вариантов осуществления изобретения момент пересечения нуля обнаруживается, когда все указанные электрические сигналы (передаваемые первыми или вторыми делителями 14, 24 частоты) имеют положительный наклон (то есть значение сигнала отрицательно непосредственно перед пересечением нуля и положительно непосредственно после него). Как вариант, момент пересечения нуля может быть обнаружен, когда все указанные электрические сигналы (передаваемые первыми или вторыми делителями частоты 10, 24) имеют отрицательный наклон.
На шестом этапе S6 генерируется сигнал фазового выравнивания, синхронизированный с моментом пересечения нуля, обнаруженным на этапе S5. Этот сигнал фазового выравнивания генерируется генератором 60 сигналов.
На седьмом этапе S7 сигнал фазового выравнивания передается на передающий узел 10 или на передающий узел 10 для фазового выравнивания первого тактового генератора 12 и второго тактового генератора 22.
Например, когда фаза второго тактового генератора 22 выравнивается с фазой первого тактового генератора 12 (фиг.1), то сигнал фазового выравнивания генерируется на передающем узле 10. Затем этот сигнал передается на коммуникационный интерфейс 41 передающего узла 10, который в этом случае является модулятором, так что он модулирует несущий сигнал с помощью сигнала фазового выравнивания от генератора, чтобы передать его на коммуникационный интерфейс 42 приемного узла 20. Последний содержит демодулятор 42, выполненный с возможностью демодуляции принятого таким образом несущего сигнала и извлечения сигнала фазового выравнивания.
Демодулированный таким образом сигнал передается на вход 25 сброса на нуль набора вторых делителей 24 частоты, чтобы выровнять их по фазе с первым тактовым генератором 12 и тем самым обеспечить фазовую когерентность в системе 1 обнаружения.
Как вариант, когда фаза первого тактового генератора 12 выровнена с фазой второго тактового генератора 22 (фиг.2), сигнал фазового выравнивания генерируется на приемном узле 20. Затем этот сигнал передается на коммуникационный интерфейс 41 приемного узла 20, который в этом случае является модулятором и передает его на коммуникационный интерфейс 42 передающего узла 10 аналогичным образом, как было раскрыто выше. Демодулированный таким образом сигнал затем передается на вход 15 сброса на нуль набора первых делителей 14 частоты, чтобы выровнять их по фазе со вторым тактовым генератором 22 и тем самым обеспечить фазовую когерентность в системе 1 обнаружения.



Использование: для обнаружения металлических предметов. Сущность изобретения заключается в том, что система обнаружения на основе непрерывного излучения для обнаружения металлических предметов содержит передающий узел, содержащий передающие катушки (Тх1, …, Txm) и первый тактовый генератор, приемный узел, содержащий приемные катушки (Rx1, … Rxn), расположенные в отдельной второй колонне, и второй тактовый генератор, детектор, выполненный с возможностью обнаружения момента пересечения нуля набором электрических сигналов передающего узла и приемного узла, генератор сигналов, выполненный с возможностью генерирования сигнала фазового выравнивания, синхронизированного с этим моментом пересечения нуля, и беспроводной коммуникационный интерфейс, выполненный с возможностью передачи соответствующего сигнала фазового выравнивания для фазового выравнивания первого тактового генератора и второго тактового генератора. Технический результат: создание системы обнаружения на основе непрерывного излучения для обнаружения металлических предметов, которая может быть быстро развернута и демонтирована на заданной площади, обеспечивая при этом обнаружение металлических предметов с уменьшенным количеством ложных срабатываний. 2 н. и 12 з.п. ф-лы, 6 ил.
1. Система (1) обнаружения на основе непрерывного излучения для обнаружения металлических предметов, содержащая передающий узел (10) и приемный узел (20), при этом:
- передающий узел (10) содержит по меньшей мере одну передающую катушку (Тх1, …, Txm), расположенную в первой колонне (2), первый тактовый генератор (12), выполненный с возможностью излучения первого электрического сигнала с первой заданной частотой (F1), по меньшей мере один первый генератор (14) частоты, выполненный с возможностью передачи на соответствующую передающую катушку (Тх1, …, Txm) электрического сигнала с частотой, синхронизированной с первой частотой (F1), так чтобы передающая катушка (Тх1, …, Txm) излучала магнитное поле; и
- приемный узел (20) содержит:
• по меньшей мере одну приемную катушку (Rx1, …, Rxn), расположенную во второй колонне (3), отдельной от первой колонны (2), причем указанная приемная катушка (Rx1, …, Rxn) выполнена с возможностью выдачи электрического сигнала в зависимости от магнитного поля, излучаемого передающей катушкой (Тх1, …, Txm), второй тактовый генератор (22), выполненный с возможностью излучения второго сигнала со второй заданной частотой (F2), и по меньшей мере один второй генератор (24) частоты, выполненный с возможностью определения электрического сигнала, имеющего частоту, синхронизированную со второй частотой (F2); и
• сравнивающее устройство (26) для сравнения электрического сигнала, выдаваемого приемной катушкой (Rx1, …, Rxn), с электрическим сигналом, определенным вторым генератором (24) частоты;
причем система (1) обнаружения отличается тем, что она дополнительно содержит:
- детектор (50), выполненный с возможностью обнаружения момента пересечения нуля набором электрических сигналов, передаваемых по меньшей мере одним первым генератором (14) частоты или по меньшей мере одним вторым генератором (24) частоты;
- генератор (60) сигналов, выполненный с возможностью генерирования сигнала фазового выравнивания, синхронизированного с моментом пересечения нуля, обнаруженного детектором (50); и
- передающие средства (40), содержащие беспроводной коммуникационный интерфейс (41, 42), выполненный с возможностью передачи на передающий узел (10) или на приемный узел (20) сигнала фазового выравнивания для фазового выравнивания первого тактового генератора (12) и второго тактового генератора (22).
2. Система (1) по п. 1, в которой вторая заданная частота (F2) по существу равна заданной первой частоте (F1).
3. Система (1) по п. 1 или 2, в которой первый тактовый генератор (12) расположен в первой колонне (2), а второй тактовый генератор (22) расположен во второй колонне (3).
4. Система (1) по п. 1 или 2, в которой первый тактовый генератор (12) и второй тактовый генератор (22) перемещены за пределы первой колонны (2) и второй колонны (3).
5. Система (1) по любому из пп. 1-4, в которой детектор (50) выполнен с возможностью обнаружения момента пересечения нуля набором электрических сигналов, передаваемых первым генератором (14) частоты или вторым генератором (24) частоты, когда указанные сигналы имеют положительный наклон.
6. Система (1) по любому из пп. 1-5, в которой первая колонна (2) отделена от второй колонны (3) таким образом, что система (1) обнаружения не имеет физического соединения между первой колонной (2) и второй колонной (3).
7. Система (1) по любому из пп. 1-6, в которой передающий узел (10) содержит по меньшей мере две передающие катушки (Тх1, …, Txm) и столько же соответствующих первых генераторов (14) частоты, приемный узел (20) содержит по меньшей мере две приемные катушки (Rx1, …, Rxn) и столько же соответствующих вторых генераторов (24) частоты.
8. Система (1) по любому из пп. 1-7, в которой беспроводной коммуникационный интерфейс (41, 42) содержит по меньшей мере один из следующих элементов: радиочастотный интерфейс, оптический интерфейс и/или индуктивный интерфейс.
9. Система (1) по п. 8, в которой беспроводной коммуникационный интерфейс (41, 42) содержит индуктивный интерфейс, причем указанный индуктивный интерфейс содержит по меньшей мере одну из передающих катушек (Тх1, …, Txm) и приемных катушек (Rx1, …, Rxn) передающего узла (10) и приемного узла (20), соответственно.
10. Способ (S) обнаружения металлических предметов с помощью системы (1) обнаружения на основе непрерывного излучения по любому из пп. 1-8, причем указанный способ (S) включает следующие этапы:
S1: излучение магнитного поля по меньшей мере на одной передающей катушке (Тх1, …, Txm) на основе соответствующего электрического сигнала, имеющего частоту, которая является функцией первой частоты (F1) первого тактового генератора (12);
S2: выдача по меньшей мере одного электрического сигнала по меньшей мере на одной приемной катушке (Rx1, …, Rxn) в зависимости от магнитного поля, излучаемого на этапе S1;
S3: определение электрического сигнала, имеющего частоту, которая является функцией второй частоты (F2) второго тактового генератора (22); S4: сравнение электрического сигнала, выданного на этапе S2, и электрического сигнала, определенного на этапе S3;
S5: обнаружение момента пересечения нуля набором электрических сигналов, частота которых является функцией первой частоты (F1), или набором электрических сигналов, частота которых является функцией второй частоты (F2);
S6: генерирование сигнала фазового выравнивания, синхронизированного с моментом пересечения нуля, обнаруженным на этапе S5, и
S7: передача с помощью беспроводного коммуникационного интерфейса (41, 42) сигнала фазового выравнивания первого тактового генератора (12) и второго тактового генератора (22) на передающей узел (10) или приемный узел (20).
11. Способ по п. 10, в котором этапы S2 и S3 выполняют одновременно.
12. Способ по п. 10 или 11, в котором на этапе S5 момент пересечения нуля обнаруживают, когда набор электрических сигналов, частота которых является функцией первой частоты (F1), или набор электрических сигналов, частота которых является функцией второй частоты (F2), имеют положительный наклон.
13. Способ по любому из пп. 10-12, в котором на этапе S6 сигнал фазового выравнивания генерируют на передающем узле (10) и передают на приемный узел (20), чтобы выровнять фазу второго тактового генератора (22) с фазой первого тактового генератора (12).
14. Способ по любому из пп. 10-12, в котором на этапе S6 сигнал фазового выравнивания генерируют на приемном узле (20) и передают на передающий узел (10), чтобы выровнять фазу первого тактового генератора (12) с фазой второго тактового генератора (22).
| EP 1750147 A1, 07.02.2007 | |||
| EP 1892542 A2, 27.02.2008 | |||
| US 2009021252 A1, 22.01.2009 | |||
| US 9207315 B1, 08.12.2015 | |||
| МЕТАЛЛОДЕТЕКТОР | 2014 |
|
RU2560246C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЗАПРЕЩЁННЫХ ПРЕДМЕТОВ АРОЧНЫМ МЕТАЛЛОДЕТЕКТОРОМ | 2015 |
|
RU2589238C1 |

