Изобретение относится к радиотехнике, а именно к области пеленгации, и может быть использовано для пеленгации (измерение азимутов) и измерения углов места ионосферных сигналов в условиях приема как одного, так и двух интерферирующих лучей в широком частотном диапазоне. При приеме ионосферных сигналов в точку приема, как правило, приходят несколько лучей, отраженных от разных слоев ионосферы, с азимутами, находящимися в области главного лепестка диаграммы направленности (~5÷10 градусов). Вследствие интерференции лучей суммарный главный лепесток диаграммы направленности антенной системы, состоящий из суммы диаграмм направленности отдельных лучей, существенно меняется. В результате возникают ложные пеленги, отличающиеся от истинных пеленгов на десятки градусов. Наличие ложных пеленгов значительно снижает достоверность получаемой информации об азимуте и угле места ионосферного сигнала.
Известны фазовые способы пеленгации, осуществляемые путем измерений разности фаз между вибраторами антенной системы и оценки по этим измерениям азимутов и углов места (Патент RU №2263327, опубликован 27.10.2005 г.; Патент RU №2365931, опубликован 27.08.2009 г.; Патент RU №2429500, опубликован 20.09.2011; Патент RU №2450283, опубликован 10.05.2012 г.; Заявка на изобретение RU №2010143935, опубликована 10.05.2012 г.; Заявка RU №2003108306 от 25.03.2003 г., G01S 3/14, опубликована 10.10.2004 г.). Недостатком вышеуказанных способов является то, что используется для определения угловых параметров сигнала только фазовая информация. Однозначное определение фазы волны на вибраторах возможно на интервале 0÷360°. Это требует малого, по сравнению с длиной волны, пространственного разнесения вибраторов 
Известны способы пеленгации по максимуму диаграммы направленности антенной системы (Патент RU №2144200, опубликован 10.01. 2000 г.; Патент RU №2258241, опубликован 10.08.2005 г.; Патент RU №2419805, опубликован 27.05.2011 г.; Патент RU №2201599, опубликован 27.03.2003 г.; Патент RU №2004100714, опубликован 20.06.2005 г.). В этом случае используется временное преобразование Фурье для частотного выделения сигнала от отдельных вибраторов антенной системы и различные формы пространственной обработки данных. Наилучшим образом диаграмма направленности формируется при использовании пространственного преобразования Фурье. В результате создается двумерный комплексный угловой спектр (диаграмма направленности антенной системы). При использовании пространственного преобразования Фурье диаграмма направленности формируется по выражению (комплексный вид):

где:



α', β' - оценочные значения азимута и угла места ионосферного сигнала.
Квадрат модуля нормированной диаграммы направленности (расчетная форма) определяется выражением

где черта сверху означает суммирование по индексу «n».
Недостатком способов пеленгации по максимуму диаграммы направленности антенной системы, связанных с пространственным преобразованием Фурье, является неустойчивость решения при наличии двух лучевой интерференции при разности фаз между лучами ~180°. При приеме двух интерферирующих лучей ионосферного сигнала (различие в азимутах меньше ширины диаграммы направленности) суммарная диаграмма направленности за счет изменения разности фаз между лучами (в области ~180 градусов) в значительной степени подавляется. Боковые или задние лепестки суммарной диаграммы направленности в этих условиях становятся больше, чем основной лепесток диаграммы направленности. В результате азимут (пеленг) в амплитудном способе пеленгации определяется по максимальному боковому или заднему лепестку диаграммы направленности антенной системы. Отклонения азимута (ложные пеленги) достигают десятков градусов. В результате достоверность оценок азимутов и углов места ионосферных сигналов оказывается низкой. Кроме того, невозможно обеспечить работоспособность пеленгатора в широком частотном диапазоне 2+30 МГц. Требования точности измерения пеленга в низкочастотной части диапазона (3÷4 МГц) определяют базу антенной системы R≥150 м. Однако при количестве вибраторов ~16 в высокочастотной части диапазона (20+30 МГц) диаграмма направленности не формируется в связи с большим пространственным разнесением вибраторов по сравнению с длиной волны, что ограничивает частотный диапазон сверху.
Известны способы пеленгации, антенная система в которых состоит из ограниченного количества вибраторов (3÷5 вибратора) (Патент RU №2262119, опубликован 10.10.2005 г.; Патент RU №2253877, опубликован 10.06.2005 г.). Недостатками этого способа пеленгации является малая помехоустойчивость, вследствие отсутствия статистической обработки данных, и наличие ложных пеленгов при приеме двух близких по азимуту лучей ионосферного сигнала.
Известны способы пеленгации, антенная система в которых состоит из двух взаимно перпендикулярных линейных эквидистантных антенных решеток (Патент RU №2192651, опубликован 05.10.2000 г.). Способ включает в себя прием сигнала с помощью антенной системы, многоканального приемника, преобразование аналоговых сигналов в каждом канале в цифровую форму, использование двумерного углового преобразования Фурье, которое создает диаграмму направленности антенной системы. Максимум диаграммы направленности позволяет оценить азимут (пеленг) и угол места. Недостатком этого способа пеленгации является зависимость точности измерения пеленга от взаимной ориентации антенной системы и пеленга. При пеленгации ионосферных сигналов в условиях приема двух интерферирующих лучей могут возникать ложные пеленги, что значительно снижает достоверность оценок азимутов и углов места ионосферных сигналов.
Наиболее близким (прототип) к предлагаемому способу пеленгации при приеме как одного луча, так и двух лучей ионосферных сигналов является «Способ пеленгации с учетом корреляционной взаимосвязи между лучами», патент RU №2305294, МПК G01S 3/16, опубликован 27.08.2007 г. Он включает в себя следующую последовательность действий.
С помощью антенной решетки, состоящей из N-вибраторов, расположенных равномерно по окружности радиуса R (пространственная база сигнала) 1) принимают ионосферные сигналы, 2) преобразуют их по частоте, 3) усиливают посредством многоканального приемника. Аналоговые сигналы на выходе многоканального приемника в каждом канале (от каждого вибратора) 4) преобразуют в цифровую форму посредством многоканального аналого-цифрового преобразователя (АЦП). 5) Определяют амплитуды En и фазы Ψn принятого ионосферного сигнала в каждом канале (от каждого вибратора) с помощью временного преобразования Фурье. 6) Формируют суммарную четырехмерную (для двух лучей) диаграмму направленности с учетом коэффициента корреляции между лучами по выражениям.

где











Черта сверху означает суммирование по индексу n.
Знак * означает комплексное сопряжение,
Знак ∧ означает комплексную величину.
7) Производят сканирование диаграммой направленности в четырехмерном пространстве за счет изменения оценочных азимутов и углов места 




Недостатком этого способа является большая трудоемкость, продолжительность расчетов, связанная с необходимостью перебора (сканирования диаграммой направленности) двух азимутов и двух углов места (



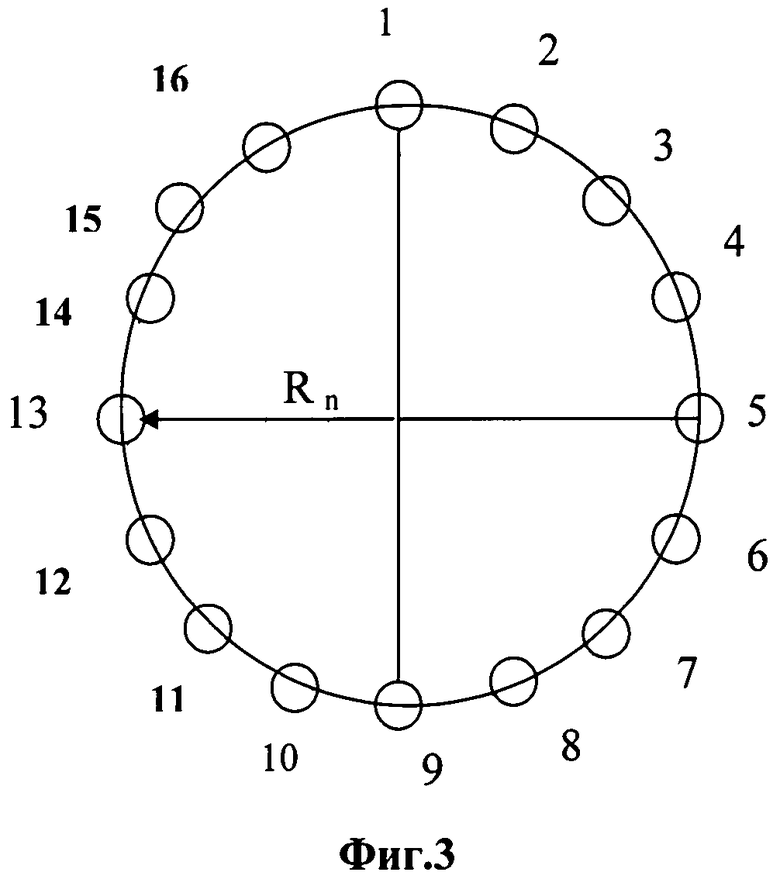
Блок схема данного способа пеленгации (прототипа) представлена на фиг.1. Согласно данному способу пеленгации последовательность действий следующая.
1. Принимают сигналы с помощью круговой антенной системы, состоящей из N-вибраторов 
2. С помощью многоканального приемника преобразуют сигналы от каждой антенны по частоте, усиливают и фильтруют (блок 2).
3. Преобразуют аналоговые сигналы на выходах многоканального приемника от каждого вибратора в цифровую форму с помощью многоканального аналого-цифрового преобразователя (АЦП) (блок 3).
4. Определяют амплитуды En и фазы ψn сигналов от каждого вибратора (в каждом канале), например с помощью временного преобразования Фурье (блок 4).
5. Задают точку в пространстве оценочных азимутов 



6. Повторяют действия (5) с другими значениями параметров

7. 0пределяют максимальное значение четырехмерной диаграммы направленности и фиксируют параметры 





8. Определяют ранг поля (однолучевое или двулучевое) по условию U01/U02≥3 и оставляют решения, удовлетворяющие этому условию (блок 8).
Целью предлагаемого изобретения (технический результат) является сокращение времени расчета угловых параметров двулучевого ионосферного сигнала в прототипе «Способ пеленгации с учетом корреляционной взаимосвязи между лучами».
Технический результат достигается тем, что алгоритмически формируют дополнительную антенную систему с минимальной базой. По максимальному значению двумерной диаграммы направленности 







где:
En, Ψn - амплитуда и фаза, измеренные на n-вибраторе,
Rn - радиус вектор, определяющий расположение вибратора,



Областью определения устойчивого однолучевого решения
Сокращение времени расчета обеспечивается тем, что наиболее трудоемкий расчет четырехмерной диаграммы направленности по выражению (3) производится на ограниченной площадке, а не на всем угловом диапазоне азимутов и углов места.
Обоснованием устойчивого однолучевого способа пеленгации в условиях двулучевого приема является следующее.
Запишем сигнал на n-вибраторе 

где 
α0y, β0y - устойчивые значения азимута и угла места ионосферного сигнала в условиях двух лучевого приема,

В выражении (5) изменим индекс «и» на единицу и исключим

На основании выражения (6) составим функционал правдоподобия

При возведении в квадрат (7) получим:

Черта сверху означает суммирование по N-вибраторам (по индексу n).
При нормировке (8) на сумму первых двух слагаемых получим:

Второе слагаемое в (9) определяет квадрат нормированной диаграммы направленности (4).

Если волновой вектор

Принципиальным для устойчивости решения является наличие разности измеренных фаз на соседних вибраторах ψn+1-ψn в выражении (4). Она существенно уменьшает зависимость азимута и угла места от разности фаз отдельных лучей ионосферного сигнала. Кроме того, разность радиус-векторов 
Сущность способа поясняется следующими рисунками и диаграммами. На фиг.1 представлена структурная схема устройства, с помощью которого реализуется прототип «Способ пеленгации с учетом корреляционной взаимосвязи между лучами».
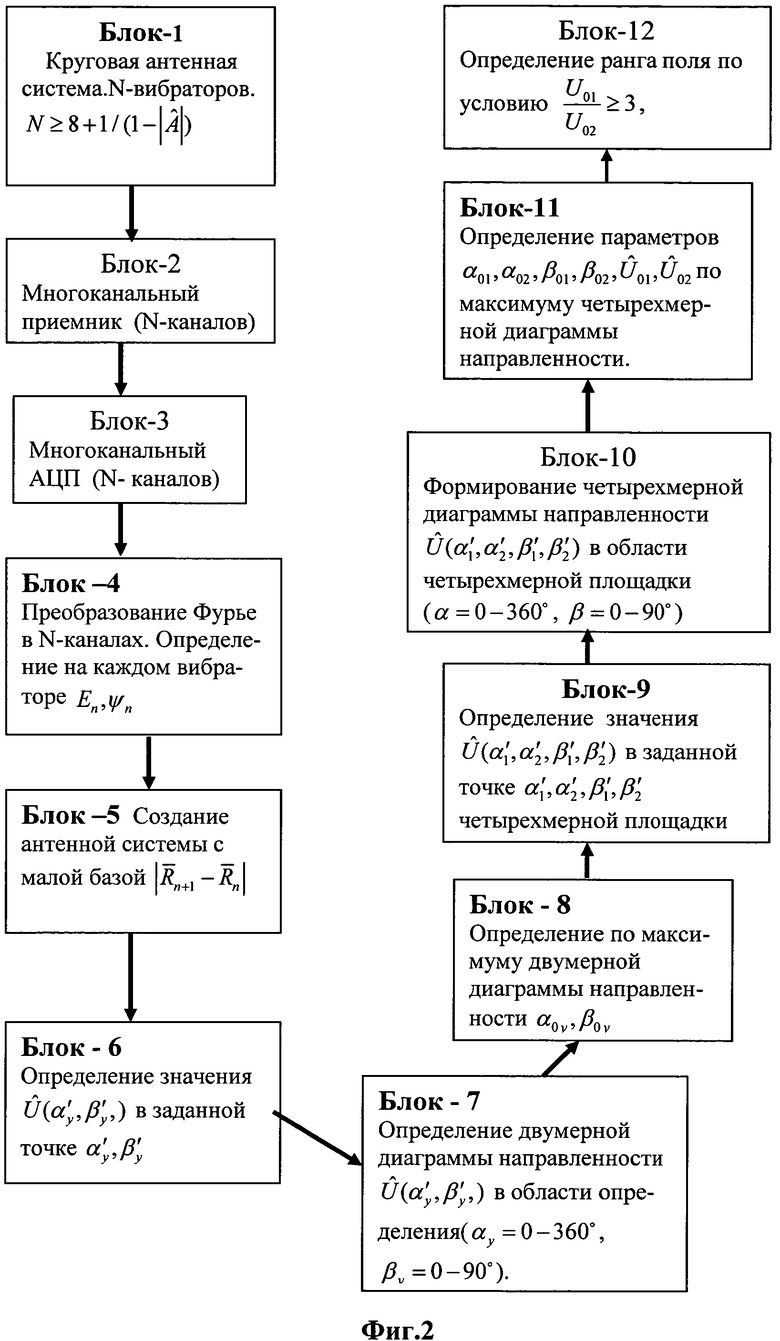
На фиг.2 представлена структурная схема устройства, с помощью которого реализуется предлагаемый способ пеленгации. По сравнению с прототипом добавляются четыре блока действий, связанных с оценкой устойчивых значений азимута и угла места.
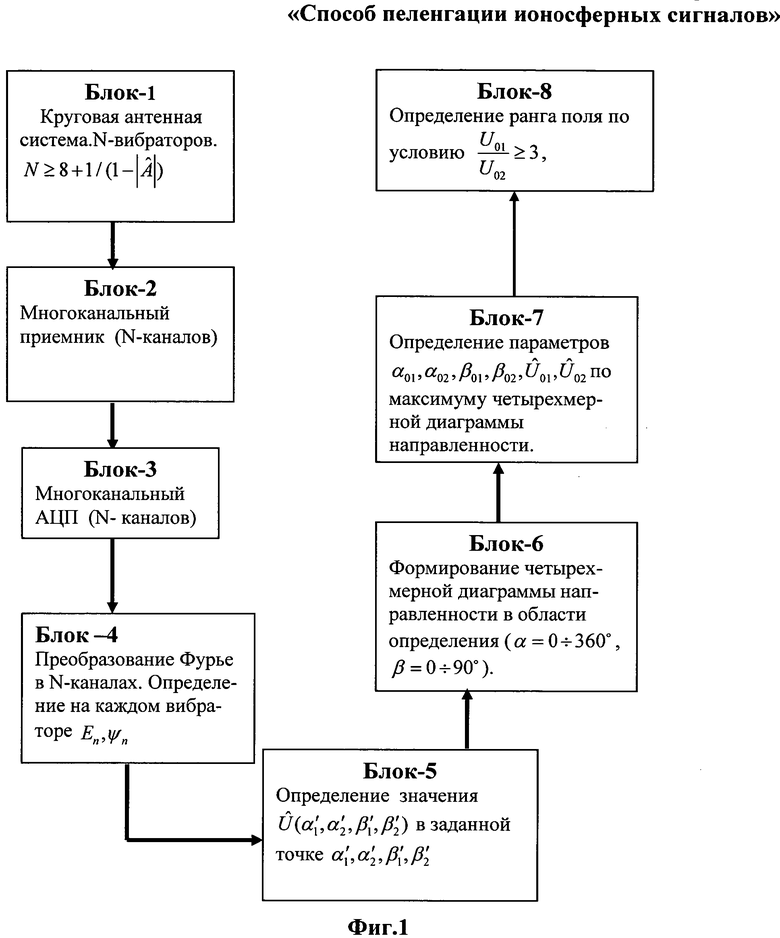
На фиг.3 представлено расположение вибраторов антенной системы на поверхности земли. Диаметр окружности равен 130 м, количество вибраторов 16.
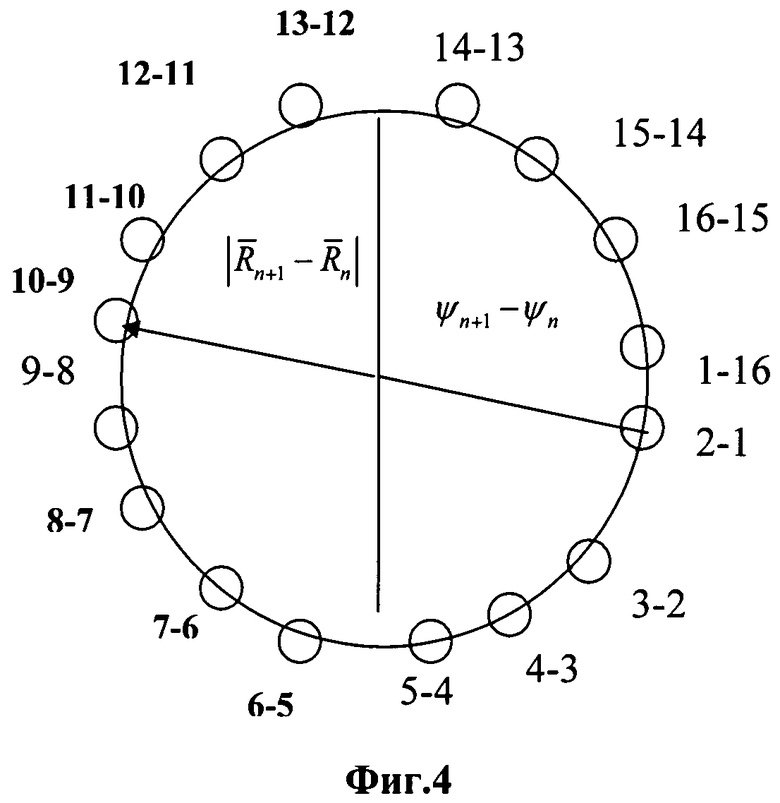
На фиг.4 показано расположение вибраторов новой антенной системы с минимальной базой. Диаметр окружности в этом случае равен 50.72 м., количество вибраторов остается равным 16. Распределение фаз на вибраторах новой антенной системы ψn+1-ψn.
С помощью модельных расчетов сравним решения (2) и (4). Будем называть решение (2) методом Фурье, а решение (4) однолучевым методом максимального правдоподобия.
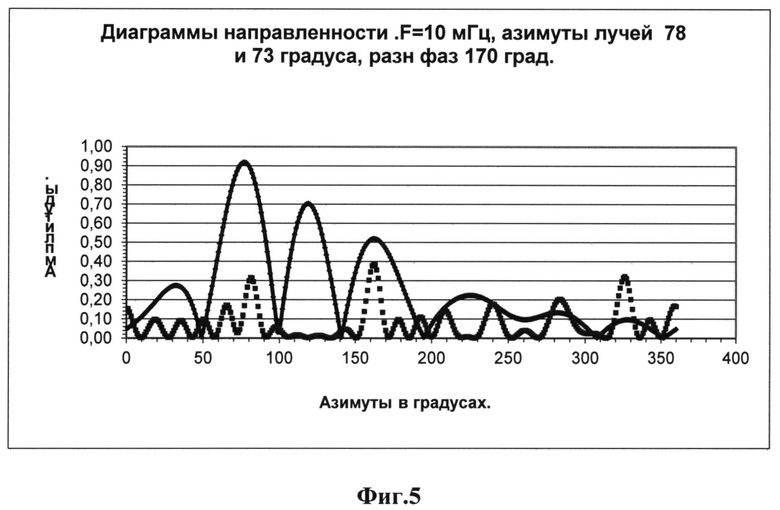
На фиг.5 показана азимутальная диаграмма направленности, рассчитанная согласно (4) (сплошная линия) при условии двулучевого поля с азимутами 78° и 73° и разностью фаз между лучами 180°. Основной лепесток диаграммы направленности больше по амплитуде, чем боковые лепестки. Пеленг (азимут) определяется правильно. При расчете диаграммы направленности согласно выражению (2) (пунктирная линия на фиг.5) основной лепесток диаграммы направленности подавлен в результате интерференции двух лучей. Боковой лепесток (α~160°) существенно превышает по амплитуде основной лепесток. В результате пеленг будет ~160°.
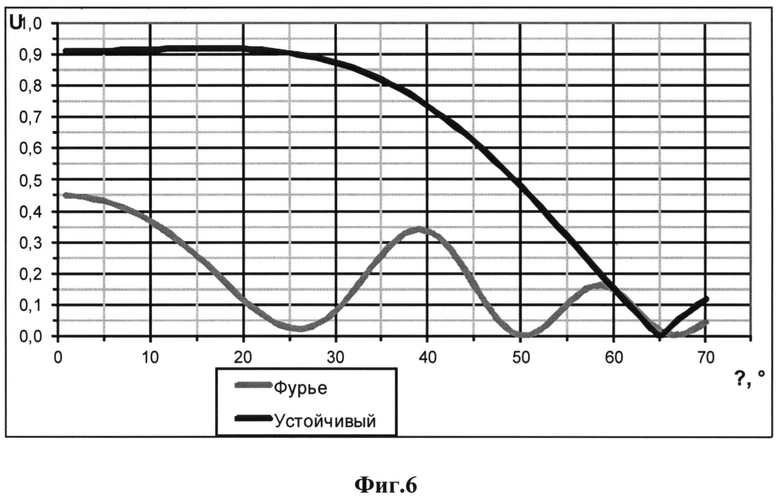
На фиг.6 показана угломестная диаграмма направленности, полученная методом Фурье (по выражению (2)) и методом максимального правдоподобия (по выражению (4)). Рабочая частота равна 10 МГц (λ=30 м). В результате интерференции двух лучей главный лепесток диаграммы направленности, определенной методом Фурье, оказывается подавленным. В данных условиях угол места будет равен нулю, что неверно. Диаграмма направленности, определенная методом максимального правдоподобия, позволяет определить угол места β=15°. Модельное значение углов места двух лучей равны 10° и 30°, азимут равен 76°, разность фаз 180°.
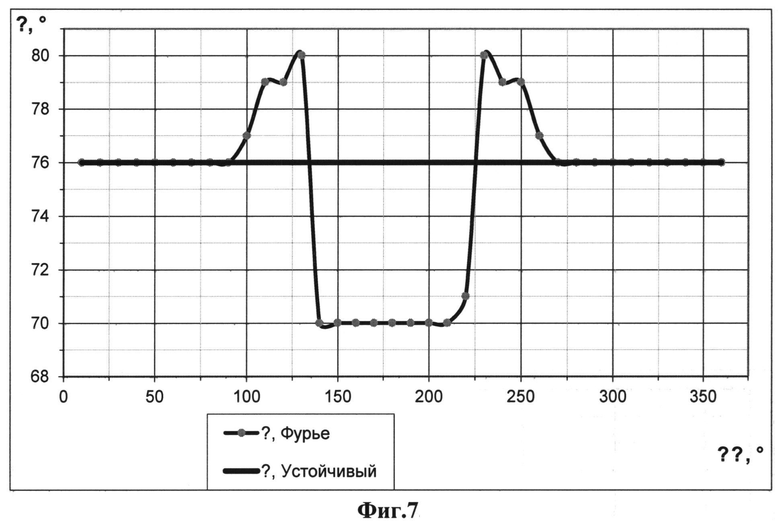
На фиг.7 показаны изменения азимутов в зависимости от разности фаз между лучами. Точками отмечены азимуты, полученные методом Фурье(выражение (2)). В области Δφ~180° азимуты сильно отклоняются от истинных значений. Линией показан азимут, полученный методом максимального правдоподобия (выражение (4)). Он равен 76°. Это средний азимут двух лучей, и он практически не имеет зависимости от разности фаз. При изменении соотношения амплитуд этот азимут меняется от значения 78° до значения 73°.
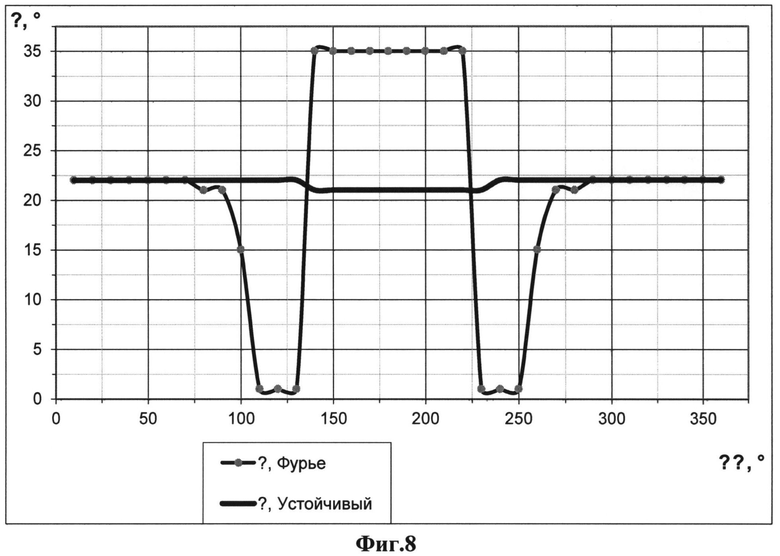
На фиг.8 показаны изменения углов места в зависимости от разности фаз двух лучей. Угол места, определенный методом Фурье (точки, выражение (2)) в области 180° разности фаз имеет сильные отклонения. Угол места, определенный методом максимального правдоподобия (выражение (4)) почти не меняется при изменении разности фаз между лучами. Таким образом, новый алгоритм обработки позволяет существенно уменьшить зависимость решения задачи оценки азимутов и углов места от разности фаз в условиях двулучевого приема.
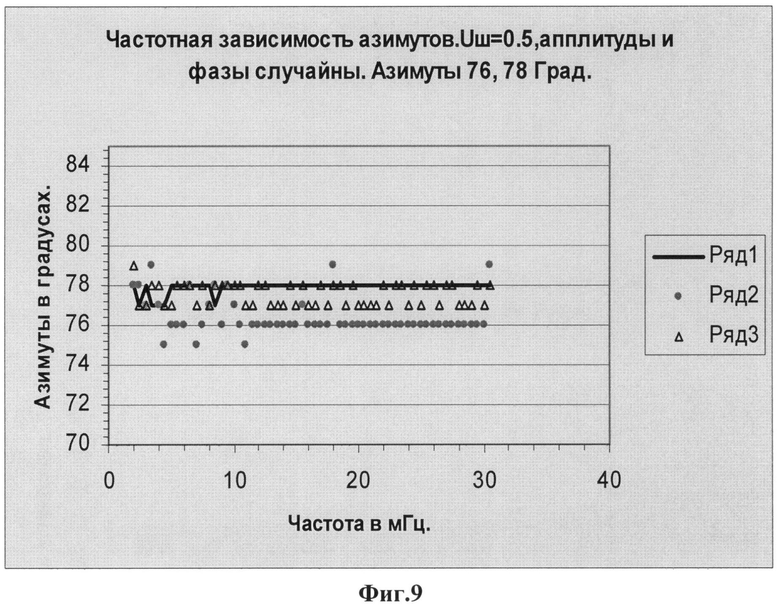
На фиг.9 показана частотная зависимость азимутов. В модельных расчетах заданы два луча с азимутами 76 и 78 градусов. Добавлена шумовая составляющая. Расчет устойчивых значений азимута проведен в соответствии с выражением (4) (Линия с треугольным маркером (ряд 3)). Расчет азимутов первого и второго лучей проведен в соответствии с выражением (3) (Линия с точками и сплошная линия). Как видно из рисунка устойчивые значения азимутов находятся в пределах азимутов первого и второго лучей. Ложные азимуты не отмечаются во всем частотном диапазоне 2÷30 МГц. Время расчета в соответствии с прототипом составляет около трех часов на ЭВМ типа «Пентиум». Время расчета в соответствие с предлагаемым способом составляет 0.5 с.
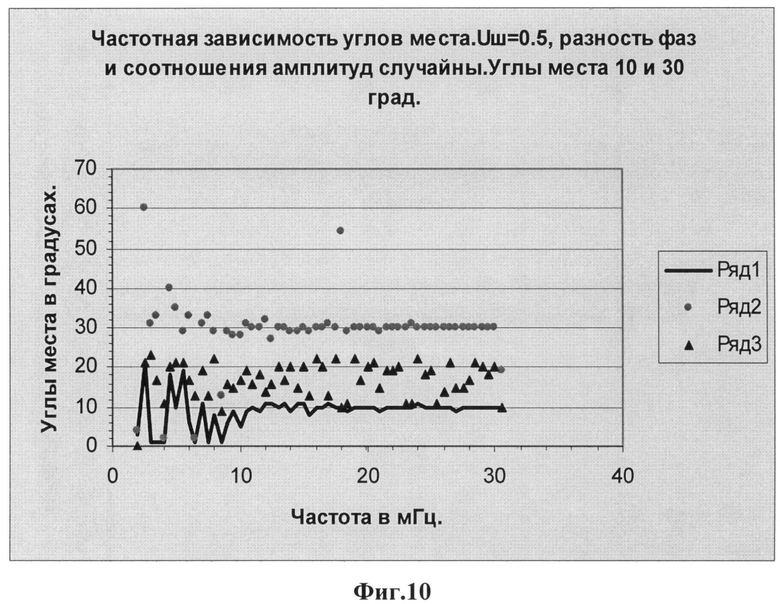
На фиг.10 показан частотный диапазон изменений устойчивых углов места (линия с треугольными маркерами, ряд 3). В модели сигнала заданы два луча с углами места 30° и 10°. Частотные зависимости оценочных углов места, определенных предлагаемым способом представлены сплошной линией (ряд 1, луч с углом места 10 градусов) и линией с точечными маркерами (ряд 2, луч с углом места 30 градусов). В этих расчетах устойчивые углы места располагаются в области, ограниченной углами места первого и второго лучей. Значительных отклонений углов места не отмечается.
Предлагаемый способ пеленгации (Фиг.2) осуществляется следующим образом.
1. Принимают сигналы с помощью круговой антенной системы, состоящей из N-вибраторов, расположенных на поверхности земли равномерно по окружности радиуса R (блок 1).
2. С помощью многоканального приемника преобразуют сигналы от каждой антенны по частоте, усиливают и фильтруют (блок 2).
3. Преобразуют аналоговые сигналы на выходе многоканального приемника от каждого вибратора в цифровую форму с помощью многоканального аналого-цифрового преобразователя (АЦП) (блок 3).
4. Определяют амплитуды и фазы сигналов от каждого вибратора (в каждом канале), например с помощью временного преобразования Фурье (блок 4).
5. Создают алгоритмически новую антенную систему с минимальной базой, вибраторы которой расположены по окружности с радиусом 
6. Задают точку в пространстве оценочных азимутов (0÷360°) и углов места (0÷90°) и вычисляют согласно (4) в точке значение двумерной диаграммы направленности по выборке данных и оценочному волновому вектору луча и запоминают значения, (блок 6).
7. Повторяют действия (6) с другими значениями параметров из области их определения (0÷360° по азимуту и 0÷90° по углу места) и создают поверхность в двумерном пространстве азимутов и углов места (двумерную диаграмму направленности) (блок 7).
8. Определяют максимальное значение двумерной диаграммы направленности и фиксируют параметры (блок 8).
9. Задают точку на ограниченной четырехмерной площадке оценочных азимутов и углов места и вычисляют согласно (3) в точке 




10. Повторяют действия (9) с другими значениями параметров и из области их определения (ограниченная четырехмерная площадка) и создают часть поверхности в четырехмерном пространстве азимутов и углов места (четырехмерную диаграмму направленности вблизи максимума) (блок 10).
11. Определяют максимальное значение четырехмерной диаграммы направленности и фиксируют параметры α01, α02, β01, β02, 

12. Определяют ранг поля (однолучевое или двулучевое) по условию 
Время расчета азимутов и углов места по предлагаемому способу сокращается на пять порядков по сравнению с временем расчета по прототипу. По результатам модельных расчетов технический результат заявляемого способа пеленгации вполне достигается.
С учетом всего вышеизложенного можно утверждать, что поставленная цель - сокращение времени расчета азимутов и углов места ионосферного сигнала в условиях двулучевого приема за счет предварительной оценки устойчивых значений азимута и угла места вполне достигается с сохранением высоких точностей оценок азимутов и углов места первого и второго лучей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГАЦИИ ИОНОСФЕРНЫХ СИГНАЛОВ В УСЛОВИЯХ ИНТЕРФЕРЕНЦИИ ЛУЧЕЙ | 2012 |
|
RU2516688C1 |
| СПОСОБ ОЦЕНКИ УГЛОВЫХ ПАРАМЕТРОВ ИОНОСФЕРНЫХ СИГНАЛОВ | 2012 |
|
RU2518013C1 |
| СПОСОБ ПЕЛЕНГАЦИИ С УЧЕТОМ КОРРЕЛЯЦИОННОЙ ВЗАИМОСВЯЗИ МЕЖДУ ЛУЧАМИ | 2005 |
|
RU2305294C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГАЦИОННОЙ ПАНОРАМЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2528177C2 |
| СПОСОБ МНОГОСИГНАЛЬНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ ДЛЯ КРУГОВОЙ АНТЕННОЙ СИСТЕМЫ | 2012 |
|
RU2497141C1 |
| СПОСОБ МНОГОСИГНАЛЬНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2008 |
|
RU2382379C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ПРИХОДА РАДИОСИГНАЛА | 2021 |
|
RU2787952C1 |
| СПОСОБ ДОПЛЕРОВСКОЙ ФИЛЬТРАЦИИ ИОНОСФЕРНЫХ СИГНАЛОВ | 2012 |
|
RU2516589C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
Изобретение относится к радиотехнике, а именно к области пеленгации, и может быть использовано для пеленгации (измерения азимутов) и измерения углов места ионосферных сигналов в условиях приема как одного, так и двух лучей в широком частотном диапазоне. Достигаемый технический результат - сокращение времени определения угловых параметров двулучевого ионосферного сигнала. Указанный результат достигается тем, что формируется новая антенная система с минимальной базой. По максимальному значению двумерной диаграммы направленности



Способ пеленгации ионосферных сигналов, включающий прием ионосферного сигнала с помощью антенной системы, состоящей из N-вибраторов, расположенных равномерно по окружности радиуса R, преобразование по частоте и усиление сигналов от каждого вибратора с помощью многоканального приемника, преобразование аналоговых сигналов на выходе многоканального приемника в каждом канале в цифровую форму с помощью многоканального аналого-цифрового преобразователя, определение амплитуды En и фазы ψn принятого ионосферного сигнала в каждом канале, формирование четырехмерной диаграммы направленности






| СПОСОБ ПЕЛЕНГАЦИИ С УЧЕТОМ КОРРЕЛЯЦИОННОЙ ВЗАИМОСВЯЗИ МЕЖДУ ЛУЧАМИ | 2005 |
|
RU2305294C2 |
| ОДНОПУНКТОВЫЙ СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1993 |
|
RU2054690C1 |
| RU 2005121771 A, 20.01.2007 | |||
| СПОСОБ ОДНОПУНКТОВОГО МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА АТМОСФЕРИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2090903C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ МОЛНИЕВЫХ РАЗРЯДОВ | 1999 |
|
RU2152054C1 |
| JP 2006266858 B2, 31.08.2006 | |||
| US 5313210 A, 17.05.1994 | |||
| WO 2006075992 A2, 20.07.2006 | |||
| US 6914553 B1, 05.07.2005 | |||

