Настоящее изобретение относится к способу для оценивания параметров скорости и силы в произвольном месте движущейся бурильной колонны на основании тех же параметров, измеренных на поверхности.
Типовая бурильная колонна, используемая для бурения нефтяных и газовых скважин, представляет собой исключительно тонкую и гибкую конструкцию с соответственно сложным динамическим поведением. В качестве примера, колонна длиной 5000 м, состоящая главным образом из буровых труб диаметром 127 мм, имеет отношение длины к диаметру приблизительно 40000. Большинство скважин являются искривленными, что означает, что их траектории и точки вскрытия проектного горизонта существенно отклонены от прямой вертикальной скважины. Вследствие этого такой колонне свойственны сравнительно высокие контактные силы, действующие вдоль колонны. Когда колонну вращают и перемещают в осевом направлении, эти контактные силы порождают крутящий момент и силу сопротивления значительного уровня. Кроме того, колонна также взаимодействует с пластом через буровое долото, и с текучей средой, циркулирующей вниз и вверх вдоль колонны в кольцевом промежутке. Все эти составляющие трения являются нелинейными, что означает, что их изменение не пропорционально скорости. Такое нелинейное трение делает динамику буровой колонны весьма сложной, даже если пренебречь поперечными вибрациями колонны, и ограничить анализ только торсионными и продольными модами. Одним явлением, которое вызвано сочетанием нелинейного трения и высокой упругости колонны, являются крутильные колебания, вызванные движением типа «проскальзывание-застой» или прерывистым скольжением. Они характеризуются значительными вариациями поверхностного крутящего момента и скорости внутрискважинного вращения, и считаются основной причиной множества проблем, таких как неудовлетворительная скорость бурения и преждевременный выход из строя буровых долот и различного скважинного инструмента. Данные проблемы видимо тесно связаны с пиковыми скоростями вращения в фазе скольжения, если предположить, что имеет место сильная связь между высокими скоростями вращения и сильными поперечными вибрациями. Выше определенных критических скоростей вращения поперечные вибрации приводят к высоким ударным нагрузкам, вызванным вихревым и хаотичным движением бурильной колонны. Поэтому было бы очень ценно иметь возможность обнаруживать такие вариации скорости, проводя измерения на поверхности. Хотя функция измерений во время бурения (ИВБ) иногда может давать информацию об уровнях скважинных вибраций, скорость передачи данных при телеметрии по гидроимпульсному каналу связи настолько низка (обычно 0,02 Гц), что невозможно получить исчерпывающую картину вариаций скорости.
Мониторинг и точное измерение вариаций внутрискважинной скорости важно не только для количественного оценивания и раннего обнаружения прерывистого скольжения. Это также ценный инструментарий для оптимизации и оценивания ремонтных средств, таких как программа, предназначенная для демпфирования крутильных колебаний за счет интеллектуальных функций управления верхним силовым приводом. Верхний силовой привод (ВСП) - это общепринятое наименование привода, расположенного на поверхности, который используется для вращения бурильной колонны.
Уровень техники включает в себя два немного различающихся способа, раскрытых в документах US 2011/0245980 и ЕР 2364397. В первом документе раскрыт способ для оценивания мгновенного значения скорости вращения бурового долота на основании крутящего момента ВСП. В данный крутящий момент вносят поправку на инерцию и потери в передаточном механизме, чтобы обеспечить косвенное измерение крутящего момента на выходном валу ВСП. Этот расчетный момент дополнительно обрабатывают полосовым фильтром, центральная частота которого лежит близко к наименьшей частоте собственных крутильных колебаний колонны, и таким образом селективно выделяют вариации крутящего момента, вызванные колебаниями, которые вызваны прерывистым скольжением. Наконец, отфильтрованный крутящий момент умножают на крутильную податливость колонны и угловую частоту, чтобы получить угловую динамическую скорость нижнего конца колонны. Данный способ дает сравнительно хорошую оценку скорости вращения бурового долота для установившихся колебаний, вызванных прерывистым скольжением, но не позволяет предсказывать скорость в переходных режимах при больших изменениях скорости на поверхности, а также, когда крутящий момент более изменчив с низкой периодичностью.
Во втором документе раскрыт слегка усовершенствованный способ, в котором используется более совершенная методика полосовой фильтрации. Способ также оценивает мгновенную скорость вращения долота по данным измерения крутящего момента, выполняемого на поверхности, при этом способ сосредоточен только на одной частотной компоненте. Хотя способ дает мгновенное значение скорости вращения долота, де факто он дает оценку скорости, которая имела место в момент, отстоящий по фазе на полпериода назад. Поэтому, способ работает довольно хорошо для установившихся колебаний, вызванных прерывистым скольжением, но он не работает в случаях, когда скорость в забое и крутящий момент наверху изменчивы в большей степени.
Дополнительно к неудовлетворительным результатам в переходных режимах, например, в время пусков и изменений скорости вращения на поверхности, вышеуказанным способам присущи слабые места, состоящие в том, что точность оценки скорости в забое зависит от типа управления скоростью. Мягкое управление скоростью при больших вариациях скорости на поверхности дает менее надежные оценки скорости в забое. Это объясняется тем, что колонна и ВСП взаимодействуют друг с другом, а эффективная взаимная податливость, которую определяют, как отношение скручивания колонны к крутящему моменту на поверхности, зависит от эффективной мобильности ВСП.
Целью изобретения является исправление или ослабление по меньшей мере одного из недостатков уровня техники, или по меньшей мере создание полезной альтернативы уровню техники.
Указанная цель достигается благодаря отличительным признаков, которые конкретно рассмотрены в нижеприведенном описании и последующей формуле изобретения.
Изобретение определяется независимыми пунктами формулы изобретения. Зависимые пункты формулы изобретения определяют предпочтительные варианты осуществления изобретения.
В своем первом аспекте изобретение относится к способу оценивания параметров внутрискважинных скорости и сил в произвольном месте движущейся бурильной колонны на основании данных измерения тех же параметров на поверхности, при этом способ содержит этапы, на которых:
а) используют геометрию и упругие свойства бурильной колонны для расчета передаточных функций, описывающих зависящие от частоты амплитудные и фазовые соотношения между взаимными комбинациями параметров скорости и силы на поверхности и в забое;
b) выбирают базовый период времени;
c) измеряют, напрямую или косвенно, скоростные и силовые параметры на поверхности, предварительно обрабатывают указанные измеренные данные путем применения сглаживающих и/или прореживающих фильтров, и сохраняют предварительно обработанные данные в средствах хранения данных, которые хранят предварительно обработанные данные измерений на поверхности по меньшей мере на протяжении последнего завершившегося базового периода времени;
d) при обновлении содержимого средств хранения данных - вычисляют внутрискважинные параметры в частотной области путем применения интегрального преобразования, такого как преобразование Фурье, к параметрам, полученным на поверхности, перемножают результаты с указанными передаточными функциями, применяют обратное интегральное преобразование к суммам связанных членов, и выявляют точки в указанных базовых периодах времени, чтобы получить задержанные по времени оценки параметров динамической скорости и силы.
Связанные члены в данном контексте означают члены, представляющие компоненты того же самого внутрискважинного параметра, но происходящие от различных параметров, измеренных на поверхности.
Средняя скорость равна средней скорости на поверхности, а средняя сила равна средней силе на поверхности минус контрольная сила, умноженная на коэффициент глубины, зависящий от траектории ствола скважины и геометрии бурильной колонны.
Согласно предпочтительному варианту осуществления вышеуказанное интегральное преобразование может представлять собой преобразование Фурье, но изобретение не ограничивается каким-то конкретным интегральным преобразованием. В ином варианте осуществления может быть использовано преобразование Лапласа.
Подробное описание того, как может быть осуществлено интеллектуальное управление ВСП на основании вышеуказанных оценок параметров скорости и силы, ниже дано не будет, однако для получения дополнительных деталей можно обращаться к документам WO 2013/112056, WO 2010064031 и WO 2010063982, права на которые принадлежат заявителю настоящего изобретения, а также к документам US 5117926 и US 6166654, права на которые принадлежат компании Shell International Research.
В своем втором аспекте изобретение относится к системе для оценивания внутрискважинных скоростных и силовых параметров в произвольном месте движущейся бурильной колонны на основании данных измерения тех же параметров на поверхности, при этом система содержит:
- средства приведения бурильной колонны в движение;
- средства измерения скорости для измерения указанной скорости на поверхности или вблизи поверхности;
- средства измерения силы для измерения указанной силы на поверхности или вблизи поверхности;
- управляющее устройство для выборки, обработки и сохранения, по меньшей мере временного, данных, собранных от указанных средств измерения скорости и силы, причем управляющее устройство дополнительно приспособлено для:
- использования геометрии и упругих свойств бурильной колонны для расчета передаточных функций, описывающих зависящие от частоты амплитудные и фазовые соотношения между взаимными комбинациями параметров скорости и силы на поверхности и в забое;
- выбора или получения базового периода времени в качестве входного параметра;
- предварительной обработки указанных данных, собранных при помощи средств измерения скорости и силы, путем применения сглаживающих и/или прореживающих фильтров, и сохранения предварительно обработанных данных измерения на поверхности по меньшей мере на протяжении последнего завершившегося базового периода времени; и
- при обновлении указанных сохраненных данных - вычисления внутрискважинных параметров в частотной области путем применения интегрального преобразования, такого как преобразование Фурье, параметров, полученных на поверхности, перемножения результатов с указанными передаточными функциями, применения обратного интегрального преобразования к суммам связанных членов, и выявления точек в указанном базовом периоде времени, чтобы получить задержанные по времени оценки динамических параметров скорости и силы.
Некоторые основные преимущества, которые дает настоящее изобретение по сравнению с уровнем техники, приведены ниже:
• изобретение решает задачу причинно-следственной связи путем вычисления задержанных оценок внутрискважинных параметров, но не мгновенных оценок, которые отрицали бы конечность скорости распространения волн;
• изобретение рассматривает множество частотных компонент, а не только низшую частоту собственных колебаний;
• изобретение дает информацию о крутящем моменте в забое, а не только о частоте вращения;
• изобретение применимо к любому месту на бурильной колонне, а не только к нижнему концу;
• изобретение может оперировать с любыми условиями на верхнем конце фактически с любой вариацией скорости, а не только почти с фиксированными условиями на конце и пренебрежимо малыми вариациями скорости на поверхности;
• изобретение применимо также к осевым и гидравлическим модам, а не только к угловой моде.
Для удобства, приводимый ниже анализ будет ограничен только угловой модой и оцениванием скорости вращения и крутящего момента. На протяжении описания будет использован короткий термин «скорость» в значении скорости вращения. Термин «поверхность» будет использован в значении верхнего конца бурильной колонны. Верхний силовой привод (ВСП) означает установленный на поверхности приводной механизм, используемый для вращения бурильной колонны.
Ниже изобретение будет подробно рассмотрено на примере пяти (5) этапов.
Этап 1: Рассмотрение колонны, как линейного волновода
В свете того, что было изложено выше в отношении нелинейного трения и нелинейного взаимодействия с текучими средами и пластом, может показаться, что трактовка колонны, как линейного волновода противоречит сама себе. Однако, доказано, что это очень полезная аппроксимация, и это подтверждено тем фактом, что нелинейные эффекты часто могут быть линеаризованы в существенном диапазоне значений. Контактную силу трения в стволе скважины можно рассматривать, как кулоновское трение, которое имеет постоянную величину, но меняет направление при изменениях направления скорости. Когда скорость вращения колонны является вполне определенной, момент сил трения в стволе скважины и соответствующее скручивание колонны постоянны. Момент сил, вызванный взаимодействием с текучими средами, также нелинеен, но иным образом. Он увеличивается почти пропорционально скорости вращения в степени, показатель которой обычно лежит между 1,5 и 2. Следовательно, для ограниченного диапазона скоростей момент, вызванный взаимодействием с текучими средами, может быть линеаризован и аппроксимирован постоянным членом (который добавляется к моменту ствола скважины) плюс членом, пропорциональным отклонению скорости, которое равно скорости за вычетом средней скорости. Наконец, момент, создаваемый на долоте, можно рассматривать, как неизвестный источник вибраций. Несмотря на то, что источники вибраций представляют сильно нелинейные процессы, отклик вдоль колонны может быть описан линейной теорией. Цель состоит в описании как момента (подводимого воздействия), так и скорости вращения в забое на основании результатов измерений на поверхности. В случаях сильного прерывистого скольжения, т.е. когда скорость вращения нижнего конца колонны скачет между фазой залипания, при которой скорость вращения фактически равна нулю, и фазой скольжения с вполне определенной скоростью вращения, нелинейностью трения в стволе скважины пренебречь нельзя. Однако, в силу того, что компоновка низа бурильной колонны (КНБК), гораздо более жесткая (в отношении кручения), чем бурильные трубы, ее можно рассматривать, как сосредоточенную массу, при этом величина момента трения КНБК суммируется с моментом (подводимым воздействием) на долоте.
Также предполагается, что колонну можно аппроксимировать цепочкой из конечного числа n однородных участков. Это допущение справедливо для частот в интервале от низких до средних также для участков, которые строго не являются однородными, например, для бурильных труб с равномерно расположенными бурильными замками. Ниже это будет рассмотрено более подробно. Другим примером является КНБК, которая обычно не однородна, а состоит из набора различных инструментов и узлов. Допущение однородности хорошо работает, если податливость и инерционные свойства идеализированной КНБК соответствуют средним значениям реальной КНБК.
Этап 2: Построение системы линейных уравнений
Аппроксимация колонны линейным волноводом предполагает, что скорость вращения или момент могут быть описаны суммой волн с различными частотами. Каждая частотная компонента может быть описана множеством 2n парциальных волн, что будет рассмотрено ниже, где n - число однородных секций.
Вывод или изложение в явном виде волнового уравнения для крутильных колебаний в однородном стержне можно найти во многих учебниках по механике волновых процессов, и поэтому в данном описании рассматриваться не будет. Можно начать с факта, что передающая линия представляет собой носитель энергии, и что данная энергия может быть выражена, как произведение «вынуждающего» параметра и параметра «отклика». В данном случае вынуждающим параметром является крутящий момент, в то время как параметром отклика является скорость вращения. Энергия передается в обоих направлениях, и поэтому представлена суперпозицией двух распространяющихся волн для каждого параметра, что в виде формул можно записать, как:


Здесь Ω↓ и Ω↑ - комплексные амплитуды волн, распространяющихся соответственно вниз и вверх (стрелки в индексе показывают направление распространения), Z - характеристическая жесткость (импеданс) для кручения (будет определен ниже), ω - угловая частота, k=ω/с - волновое число (с - скорость распространения волны),  - мнимая единица и
- мнимая единица и  - оператор действительной части (показывает, что берется действительная часть выражения в фигурных скобках). Переменная х положения в данном случае является положительной, увеличивается вниз (вдоль колонны), и равна нулю наверху колонны. В дальнейшем для удобства будет опущен зависящий от времени множитель
- оператор действительной части (показывает, что берется действительная часть выражения в фигурных скобках). Переменная х положения в данном случае является положительной, увеличивается вниз (вдоль колонны), и равна нулю наверху колонны. В дальнейшем для удобства будет опущен зависящий от времени множитель  и линейный оператор действительной части. Тогда скорость вращения и момент могут быть представлены комплексными амплитудами, которые зависят от местоположения:
и линейный оператор действительной части. Тогда скорость вращения и момент могут быть представлены комплексными амплитудами, которые зависят от местоположения:
 и
и

соответственно.
Характеристический импеданс для кручения представляет собой соотношение между крутящим моментом и угловой скоростью в крутильной волне, распространяющейся в положительном направлении. В дальнейшем тексте импеданс для кручения будет называться просто «импеданс». Он может быть выражен разными способами, например, как:

где ρ - плотность материала трубы,  - полярный момент инерции сечения (D и d - наружный и внутренний диаметры, соответственно), a G - модуль упругости при сдвиге. Импеданс, который в системе СИ измеряется в Н*м*с представляет собой действительную величину для стержня (колонны) без потерь, и комплексную величину, если имеет место линейное затухание. Влияние бурильных замков и линейного затухания будет более подробно рассмотрено ниже.
- полярный момент инерции сечения (D и d - наружный и внутренний диаметры, соответственно), a G - модуль упругости при сдвиге. Импеданс, который в системе СИ измеряется в Н*м*с представляет собой действительную величину для стержня (колонны) без потерь, и комплексную величину, если имеет место линейное затухание. Влияние бурильных замков и линейного затухания будет более подробно рассмотрено ниже.
Общее одночастотное решение для всей колонны из n секций состоит из 2n парциальных волн, представленных множеством комплексных амплитуд  где индекс i пробегает по всем n секциям. Эти амплитуды можно считать неизвестными параметрами, которые должны быть найдены из множества 2n граничных условий: 2 внешних (по одному на каждом конце) и 2n-2 внутренних условий.
где индекс i пробегает по всем n секциям. Эти амплитуды можно считать неизвестными параметрами, которые должны быть найдены из множества 2n граничных условий: 2 внешних (по одному на каждом конце) и 2n-2 внутренних условий.
Условие для верхнего конца (при х=0) может быть найдено из уравнения движения ВСП. Подробности будут опущены, но его можно записать в компактной форме:

где mt - приведенная мобильность ВСП, которая определяется как:

Здесь Z1 - характеристический импеданс верхней секции колонны, Ztd - представляет импеданс верхнего привода, Р и I - соответствующие пропорциональный и интегральный коэффициенты регулятора скорости ПИ-типа, а J - действующий момент инерции верхнего привода.
Из вышеприведенного уравнения видно, что mt становится действительной величиной и достигает своего максимума, когда угловая частота равна  . Из верхнего граничного условия (6), которое можно преобразовать в верхний коэффициент отражения,
. Из верхнего граничного условия (6), которое можно преобразовать в верхний коэффициент отражения,

можно также сделать вывод, что rt является действительной величиной, а ее модуль |rt| имеет минимум при той же самой частоте. Модуль коэффициента отражения меньший единицы означает поглощение энергии крутильной волны и затухание крутильных колебаний. Данный факт используется как основа для настройки параметров регулятора скорости, так чтобы мобильность верхнего привода была близка к действительной величине, и была достаточно высокой для низшей частоты свободных колебаний. Динамическая настройка также означает, что мобильность может изменяться во времени. В этом также заключается причина того, что экспериментальное определение мобильности ВСП предпочтительно по сравнению с теоретическим подходом.
Если нижнее граничное положение секции номер i обозначить xi, то неразрывность скорости и момента на внутренних границах может быть выражена математически следующим образом:

и

На нижнем конце колонны соответствующее граничное условие заключается в том, что момент равен данному (еще неизвестному) моменту на долоте:

Все указанные внешние и внутренние граничные условия могут быть переписаны и представлены матричным уравнением 2n×2n

где матрица А системы представляет собой ленточную матрицу, содержащую все коэффициенты амплитуды скорости,  - вектор амплитуды скорости, а
- вектор амплитуды скорости, а  - вектор возбуждения. Символ штриха «'» обозначает транспозицию, при этом предполагается, что векторные символы без штриха, написанные жирным шрифтом, представляют векторы-столбцы.
- вектор возбуждения. Символ штриха «'» обозначает транспозицию, при этом предполагается, что векторные символы без штриха, написанные жирным шрифтом, представляют векторы-столбцы.
При условии, что матрица системы является невырожденной, что всегда справедливо, если имеет место затухание, вышеприведенное матричное уравнение можно решить, чтобы получить формальное решение

Вектор решения содержит 2n комплексных амплитуд скорости, которые единственным образом определяют скорость и крутящий момент в любом месте вдоль колонны.
Этап 3: Вычисление передаточных функций
Амплитуда момента или скорости в любом месте может быть формально записана, как внутреннее (скалярное) произведение вектора  отклика (ряд) и вектора решения (столбец), то есть
отклика (ряд) и вектора решения (столбец), то есть

В качестве примера, скорость в общем положении х представляется выражением  , где нижний индекс обозначает секцию, удовлетворяющую условию
, где нижний индекс обозначает секцию, удовлетворяющую условию  . Аналогично, крутящий момент на поверхности может быть представлен выражением
. Аналогично, крутящий момент на поверхности может быть представлен выражением  . Передаточная функция, которая определяет соотношение между двумя общими переменными
. Передаточная функция, которая определяет соотношение между двумя общими переменными  и
и  в соответствующих положениях х и y может быть выражена как:
в соответствующих положениях х и y может быть выражена как:

Из граничного условия (6) для поверхности можно видеть, что матрица системы может быть записана в виде суммы базовой матрицы А0, представляющей условие с нулевой мобильностью наверху, и матрицы отклонения, равной приведенной мобильности наверху, умноженной на внешнее (векторное) произведение двух векторов. То есть,

где  а
а  . В соответствии с формулой Шермана-Моррисона в линейной алгебре, инверсия данной матричной суммы может быть записана как:
. В соответствии с формулой Шермана-Моррисона в линейной алгебре, инверсия данной матричной суммы может быть записана как:

Последнее выражение выведено на основании факта, что  является скалярной величиной. Если ввести векторы нулевой мобильности
является скалярной величиной. Если ввести векторы нулевой мобильности  и
и  , то вышеприведенную передаточную функцию можно записать как:
, то вышеприведенную передаточную функцию можно записать как:

Последнее выражение получено путем деления каждого члена на  . В явном виде скалярные функции в последнем выражении следующие:
. В явном виде скалярные функции в последнем выражении следующие:  ,
,  и
и  . Для передаточных функций, у которых знаменатель представляет момент наверху, функция отклика
. Для передаточных функций, у которых знаменатель представляет момент наверху, функция отклика  пропорциональна D', и, таким образом,
пропорциональна D', и, таким образом,  и Cvw=0.
и Cvw=0.
Следовательно, функции взаимной мобильности и взаимного крутящего момента могут быть записаны следующим образом:
 и
и

соответственно.
Данные передаточные функции не зависят от величины и фазы возмущающего (возбуждающего) момента, но зависят от мест возмущения (возбуждения) и измерения.
Приведенную верхнюю мобильность также можно рассматривать как передаточную функцию. Когда в верхней части колонны измеряются и скорость, и момент, мобильность верхнего привода может быть определена экспериментально, как преобразование Фурье скорости, деленное на преобразование Фурье отрицательного момента на поверхности. Если крутящий момент колонны на поверхности не измерять напрямую, то его можно измерять косвенно, исходя из момента привода с поправкой на влияние инерционных свойств. Следовательно, приведенную верхнюю мобильность можно записать посредством двух других выражений.

Здесь  ,
,  и
и  представляют комплексные амплитуды или коэффициенты Фурье измеренной скорости, момента на колонне и момента привода соответственно. Следует вспомнить, что приведенная верхняя мобильность может также быть определена теоретически на основании информации об инерционных свойствах верхнего привода и характеристиках регулятора скорости.
представляют комплексные амплитуды или коэффициенты Фурье измеренной скорости, момента на колонне и момента привода соответственно. Следует вспомнить, что приведенная верхняя мобильность может также быть определена теоретически на основании информации об инерционных свойствах верхнего привода и характеристиках регулятора скорости.
Этап 4: Вычисление динамической скорости и момента
Поскольку было сделано допущение, что и момент на поверхности, и скорость на поверхности представляют собой линейные реакции на вариации входного (возмущающего) момента на долоте, вышеприведенные передаточные функции могут быть использованы для оценивания как скорости вращения, так и момента в выбранном месте:


В силу допущения линейности, данное выражение справедливо для любой линейной комбинации частотных составляющих. Следовательно, оценка в реальном времени вариации скорости и момента в забое может быть найдена путем суперпозиции всех частотных составляющих, которые присутствуют в исходных сигналах на поверхности. Это может быть выражено математически, либо в виде явной суммы различных частотных компонент, либо путем использования дискретных прямого и обратного преобразований Фурье.


Данные преобразования необходимо использовать с некоторой осторожностью, потому что преобразование Фурье предполагает, что основные сигналы периодические, в то время как в общем случае сигналы для момента и скорости на поверхности не являются периодическими. Это отсутствие периодичности приводит к конечным ошибкам оценки, которые уменьшаются к центру окна анализа. Следовательно, предпочтительно использовать центральную выборку tc=t-tw/2 или, как вариант, выборки вблизи центра окна анализа, причем tw - обозначает размер окна анализа.
Этап 5: Добавление статических составляющих
Статические составляющие (нулевой частоты) не включены в вышеприведенные формулы, и, следовательно, должны рассматриваться отдельно. По очевидным причинам средняя скорость вращения должна быть одной и той же везде по длине колонны. Поэтому скорость вращения в забое, соответствующая нулевой частоте, равна средней скорости на поверхности. Единственное исключение из правила возникает во время пуска, когда колонна закручивается, а нижняя часть колонны неподвижна. Поэтому, следует использовать специальную логику для отдельной обработки случаев пуска. Одна возможность заключается в том, чтобы задавать скорость в забое равной нулю до тех пор, пока постоянно нарастающий момент на поверхности не достигнет величины среднего момента, измеренного перед последней остановкой.
Следует различать скорость нижнего конца колонны и скорость долота, поскольку последняя представляет собой сумму скорости нижнего конца и скорости вращения от дополнительного (необязательного) гидромотора объемного типа, который часто называют гидравлическим забойным двигателем. Такой гидравлический забойный двигатель, который располагают сразу над долотом, является весьма распространенным элементом бурильной колонны, и используется главным образом для контроля направления, а также для сообщения долоту дополнительной скорости и мощности.
В отличие средней скорости колонны средний момент изменяется в зависимости от положения колонны. Вдаваться в подробности того, как рассчитать уровень статического момента, выходит за рамки настоящего описания, но можно показать, что модель статического момента может быть записана в следующей форме.

где Tw0 - теоретический момент в стволе скважины (для вращения над забоем), Tbit - момент на долоте и  - кумулятивный коэффициент распределения момента. Данный коэффициент может быть выражен математически следующим образом:
- кумулятивный коэффициент распределения момента. Данный коэффициент может быть выражен математически следующим образом:

где μ, Fc и rc обозначают коэффициент трения в стволе скважины, контактное усилие на единицу длины и контактный радиус, соответственно. Коэффициент увеличивается монотонно от нуля на поверхности до единицы на нижнем конце колонны. Он является функцией многих переменных, таких как геометрия бурильной колонны, траектория скважины, но не зависит от коэффициента трения в стволе скважины. Поэтому его можно также использовать, когда наблюдаемый момент трения в стволе скважины (над забоем)  отклоняется от теоретического значения Tw0. Вследствие этого момент в положении х можно оценить, как разность
отклоняется от теоретического значения Tw0. Вследствие этого момент в положении х можно оценить, как разность  , где
, где  представляет среднее значение наблюдаемого момента на поверхности за последнее временное окно анализа.
представляет среднее значение наблюдаемого момента на поверхности за последнее временное окно анализа.
Окончательная и полная оценка скорости вращения в забое и момента может быть записана в следующей компактной форме:


Здесь  - центральная или близкая к центральной выборка обратного преобразования Фурье. Два члена во внешних фигурных скобках в вышеприведенных уравнениях здесь называются связанными членами, поскольку каждая пара представляет компоненты одной и той же внутрискважинной переменной, которая обусловлена дополнительными переменными, соответствующими поверхности.
- центральная или близкая к центральной выборка обратного преобразования Фурье. Два члена во внешних фигурных скобках в вышеприведенных уравнениях здесь называются связанными членами, поскольку каждая пара представляет компоненты одной и той же внутрискважинной переменной, которая обусловлена дополнительными переменными, соответствующими поверхности.
Применение к другим модам
Формулы, который были использованы выше для крутильных колебаний, могут быть применены также и к другим модам лишь с небольшими модификациями. Что касается переменных скорости вращения и момента в применении к осевым колебаниям, то переменные (T, Ω) следует заменить на силу натяжения и продольную скорость (F, V), а характеристика импеданса для крутильных колебаний должна быть заменена на

Здесь  - скорость звука для продольных волн, A=π(D2-d2)/4 - площадь поперечного сечения колонны, а Е - модуль упругости. Если натяжение и осевую скорость измерять не непосредственно в верхней части колонны, а в месте крепления неподвижного конца и барабана лебедки, то будет дополнительная проблема, касающаяся осевых колебаний - учет инерции движущейся массы и переменной упругости бурильных канатов (которая зависит от высоты блока). Возможное решение этой проблемы - коррекция указанных динамических эффектов перед осуществлением выборки величин натяжения и скорости подъема и сохранения их в кольцевом буфере.
- скорость звука для продольных волн, A=π(D2-d2)/4 - площадь поперечного сечения колонны, а Е - модуль упругости. Если натяжение и осевую скорость измерять не непосредственно в верхней части колонны, а в месте крепления неподвижного конца и барабана лебедки, то будет дополнительная проблема, касающаяся осевых колебаний - учет инерции движущейся массы и переменной упругости бурильных канатов (которая зависит от высоты блока). Возможное решение этой проблемы - коррекция указанных динамических эффектов перед осуществлением выборки величин натяжения и скорости подъема и сохранения их в кольцевом буфере.
Динамическая осевая скорость и сила натяжения, оценка которых производится вышеописанным способом, имеют наибольшую точность, когда колонну либо поднимают, либо опускают. Если колонне задают возвратно-поступательное движение (перемещают вверх и вниз), то сопутствующие изменения направления скорости приводят к сильному изменению трения в стволе скважины, так что трение более не остается постоянным, как это предполагает данный способ. Данное ограничение исчезает в почти вертикальных скважинах вследствие малого трения в стволе скважины.
Вышеописанный способ также применим, когда нижний конец не свободен, а зафиксирован подобно случаю, когда долото находится на дне, при условии, что условие (9) для нижнего конца заменено условием

Внутреннюю трубу или кольцевой промежуток можно рассматривать как передающие линии для волн давления. И снова вышеприведенные формулы можно использовать для вычисления давлений в забое и расхода на основании данных измерения тех же переменных на поверхности. В данном случае пару переменных (T, Ω) можно заменить на давление и расход (P, Q), в то время как характеристический импеданс, описывающий отношение указанных переменных в распространяющейся волне, равен

Здесь ρ обозначает плотность текучей среды, В - объемный модуль упругости,  здесь обозначает скорость звука для волн давления, А - площадь поперечного сечения внутренней трубы или кольцевого промежутка для текучей среды. Отличие от крутильных колебаний состоит в том, что для волн давления нижним граничным условием скорее всего будет фиксированный конец, а не свободный конец. Другое отличие заключается в том, что линеаризованное трение зависит от расхода в сравнительно более высокой степени, чем в случае крутильных волн.
здесь обозначает скорость звука для волн давления, А - площадь поперечного сечения внутренней трубы или кольцевого промежутка для текучей среды. Отличие от крутильных колебаний состоит в том, что для волн давления нижним граничным условием скорее всего будет фиксированный конец, а не свободный конец. Другое отличие заключается в том, что линеаризованное трение зависит от расхода в сравнительно более высокой степени, чем в случае крутильных волн.
Моделирование влияния замков бурильных труб
Обычные бурильные трубы не являются строго однородными, но содержат винтовые соединения, причем их внутренние и наружные диаметры существенно отличаются от соответствующих диаметров корпусов. Однако, на низких частотах (которые здесь определяются как частоты, длины волн которых сильно превышают длину одиночных труб) трубу можно рассматривать, как однородную. Эффективный характеристический импеданс можно найти, если взять импеданс трубы и умножить на поправочный коэффициент бурильного замка. Можно видеть, что эффективный импеданс для любого вида колебаний можно вычислить как

Где Zb - импеданс для секции с однородным корпусом, lj - относительная длина бурильных замков (обычно 0,05), и zj - отношение импеданса замка к импедансу корпуса. Для крутильных колебаний отношение импедансов задается отношением полярных моментов инерции, то есть  , где Dj, dj, Db и db - соответственно, диаметры наружный замка, внутренний замка, наружный корпуса и внутренний корпуса. Соответствующая формула для осевого импеданса получается просто путем замены показателей степени у диаметров с 4 на 2. Для характеристического гидравлического импеданса для внутреннего давления соответствующий импеданс замка равен
, где Dj, dj, Db и db - соответственно, диаметры наружный замка, внутренний замка, наружный корпуса и внутренний корпуса. Соответствующая формула для осевого импеданса получается просто путем замены показателей степени у диаметров с 4 на 2. Для характеристического гидравлического импеданса для внутреннего давления соответствующий импеданс замка равен  .
.
Аналогично, волновое число трубной секции может быть записано, как строго однородная величина k0=ω/с0, умноженная на поправочный коэффициент замка ƒj:

Следует отметить, что данный поправочный коэффициент симметричен относительно длин замка и корпуса, и относительно отношения импедансов. Поэтому, повторяющееся изменение диаметров колонны будет уменьшать длину волны и эффективную скорость распространения волн на коэффициент 1/ƒj В качестве примера, стандартная и широко используемая бурильная труба диаметром 127 мм имеет типичное отношение длин для замков lj=0.055, и отношение импеданса замка к импедансу корпуса для крутильных колебаний zj=5.8. Эти значения дают поправочный коэффициент волнового числа ƒj=1.10, и соответствующий поправочный коэффициент для импеданса Z/Zb=1.15. Поэтому влиянием замков бурильных труб пренебрегать не следует.
На практике аппроксимация свинченной трубы однородной трубой с эффективными значениями импеданса и волнового числа справедлива, когда kΔL<π/2, или эквивалентно для частот ƒ<с/(4ΔL). Здесь ΔL≈9.1m - типичная длина трубы. Для угловой моды колебаний, для которой скорость звука равна приблизительно с≈3100m/s, это означает, что теоретическая частотная граница составляет грубо 85 Гц. Практическая полоса частот гораздо уже, обычно 5 Гц.
Моделирование эффектов затухания
Линейное затухание вдоль колонны может быть смоделировано путем прибавления мнимой части к вышеприведенному волновому числу без потерь. В весьма общем случае линейное затухание для двух параметров по длине колонны может быть представлено следующим выражением для волнового числа

Первый коэффициент затухания δ представляет затухание, которое увеличивается пропорционально частоте, и поэтому подавляет резонансные пики более высоких мод интенсивнее, чем более низких мод. Второй тип затухания, представленный постоянным коэффициентом уменьшения γ, представляет затухание, которое не зависит от частоты, и поэтому подавляет все моды равным образом. Наиболее реалистичная комбинация этих двух коэффициентов затухания может быть измерена экспериментально посредством следующей процедуры. Опыт показывает, что, когда колонна вращается в установившемся режиме при жестком управлении верхним приводом, когда нет колебаний, вызванных прерывистым скольжением, а долото находится на дне забоя, тогда момент на долоте представляет собой широкополосное воздействие, аналогичное белому шуму. Соответствующий спектр момента на поверхности тогда будет подобен спектру отклика, показанному на фиг. 3, за исключением неизвестного коэффициента пересчета момента на долоте. Путем использования корректного коэффициента пересчета (амплитуды белого шума возмущения на долоте) и оптимальной комбинации δ и γ можно получить весьма хорошее согласование между теоретическим и наблюдаемым спектром. Процедура подбора параметров может представлять собой либо ручной метод проб и ошибок, либо автоматический метод с использованием программы для нелинейного регрессионного анализа.
Поскольку реальное затухание вдоль колонны в основе своей нелинейно, оцениваемые параметры затухания δ и γ могут быть функциями многих параметров, таких как средняя скорость, вязкость бурового раствора и геометрия бурильной колонны. Опыт показывает, что затухание, по меньшей мере для крутильных волн, является сравнительно низким, что означает, что δ<<1 и γ<<ω. Вследствие этого для затухания может быть задано нулевое или низкое фиктивное значение без снижения точности описанного способа. Это утверждение может бы несправедливым для гидравлических мод, которым свойственно сравнительно более высокое затухание.
Ниже будет рассмотрен пример предпочтительного варианта осуществления изобретения и результаты испытания, которые иллюстрируются прилагаемыми чертежами, из которых:
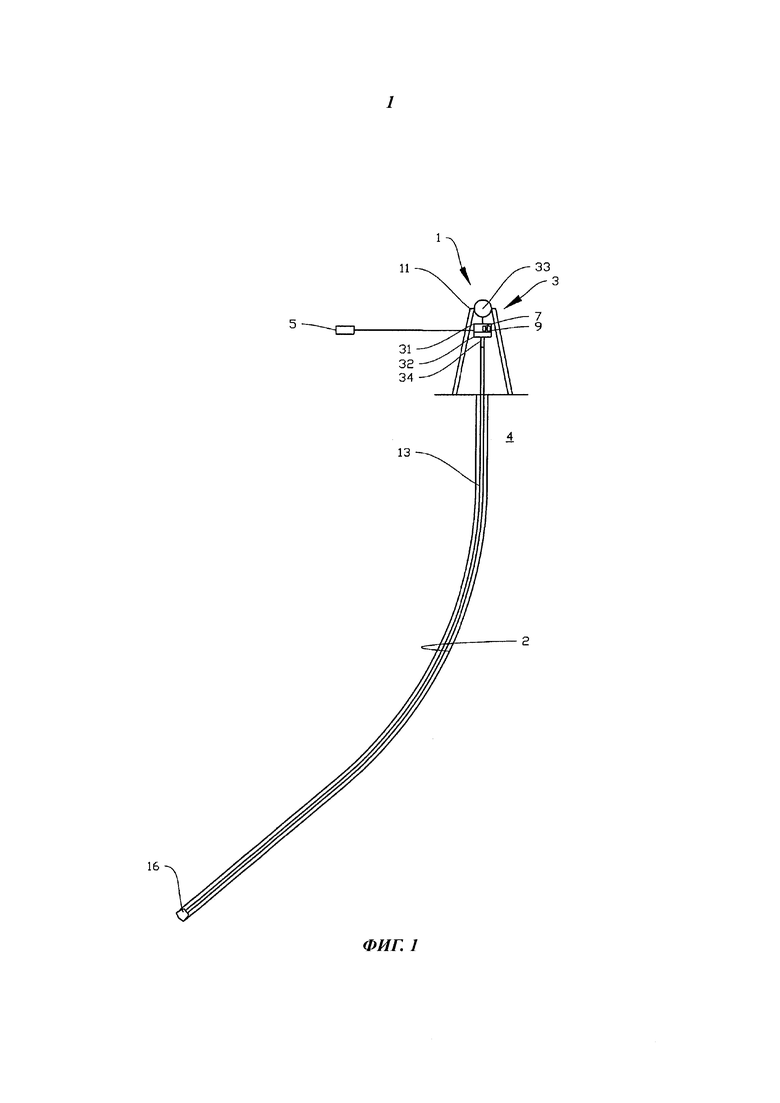
фиг. 1 схематически изображает систему, соответствующую настоящему изобретению;
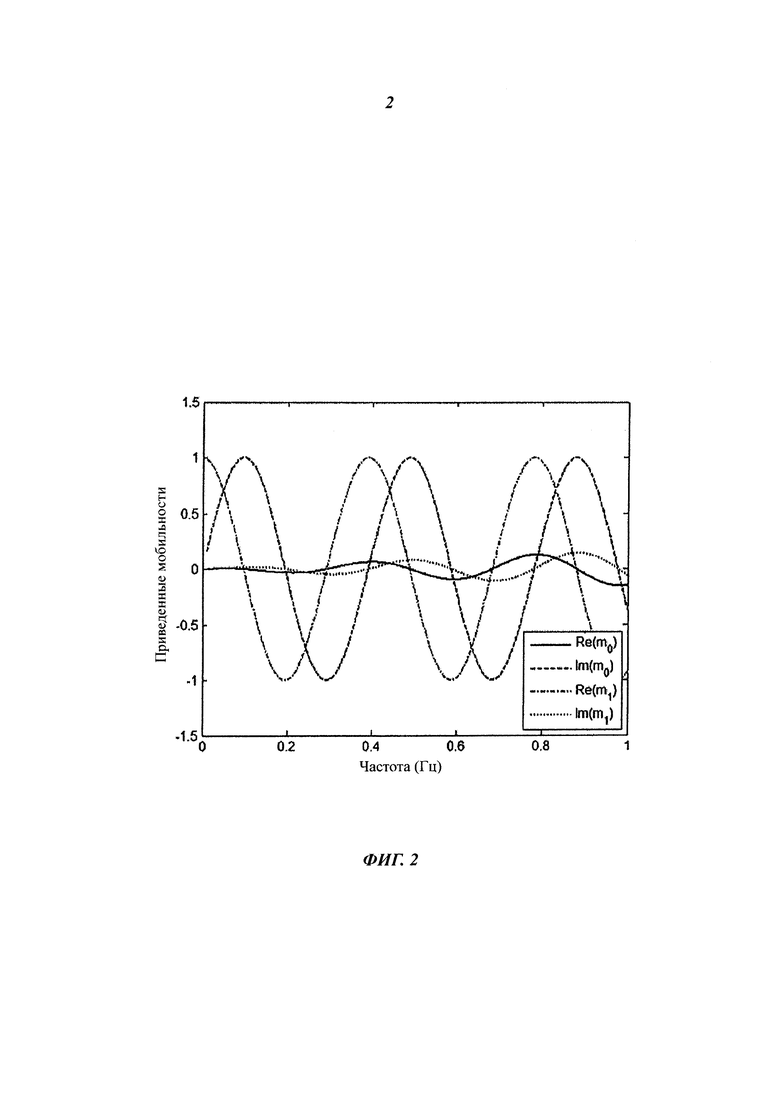
фиг. 2 изображает график, на котором показаны действительная и мнимая части зависимости приведенной взаимной мобильности от частоты;
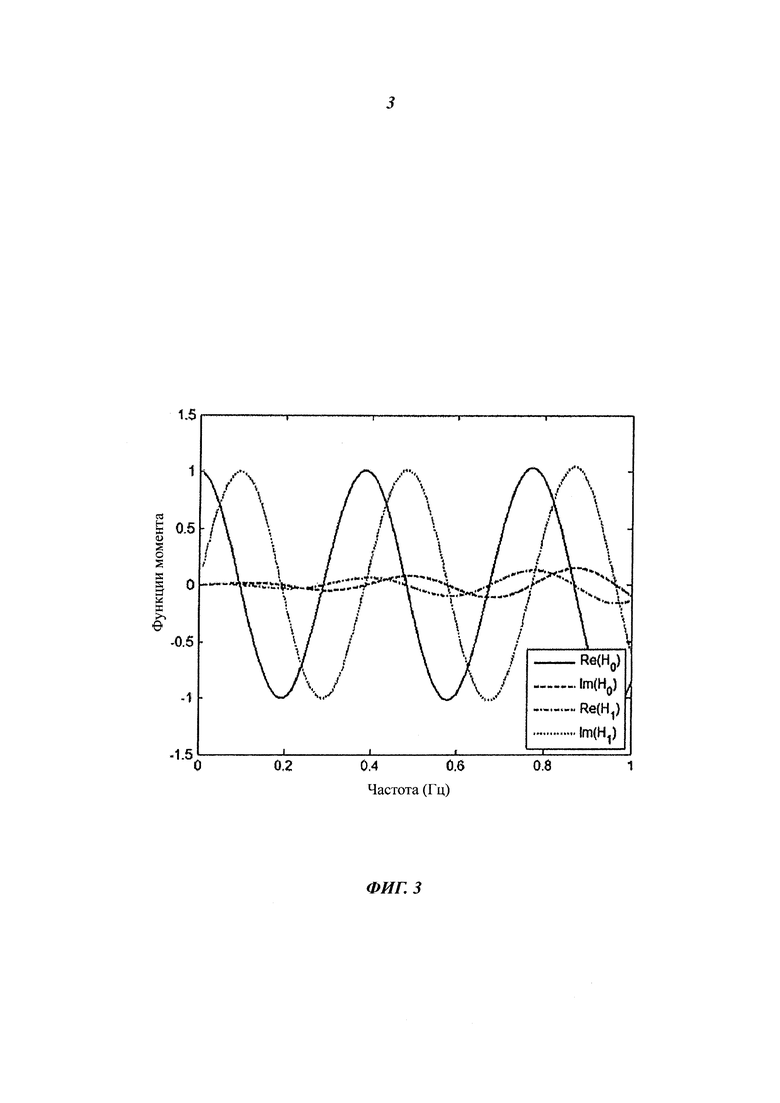
фиг. 3 изображает график, на котором показаны действительная и мнимая части зависимости крутящего момента от частоты (передаточной функции);
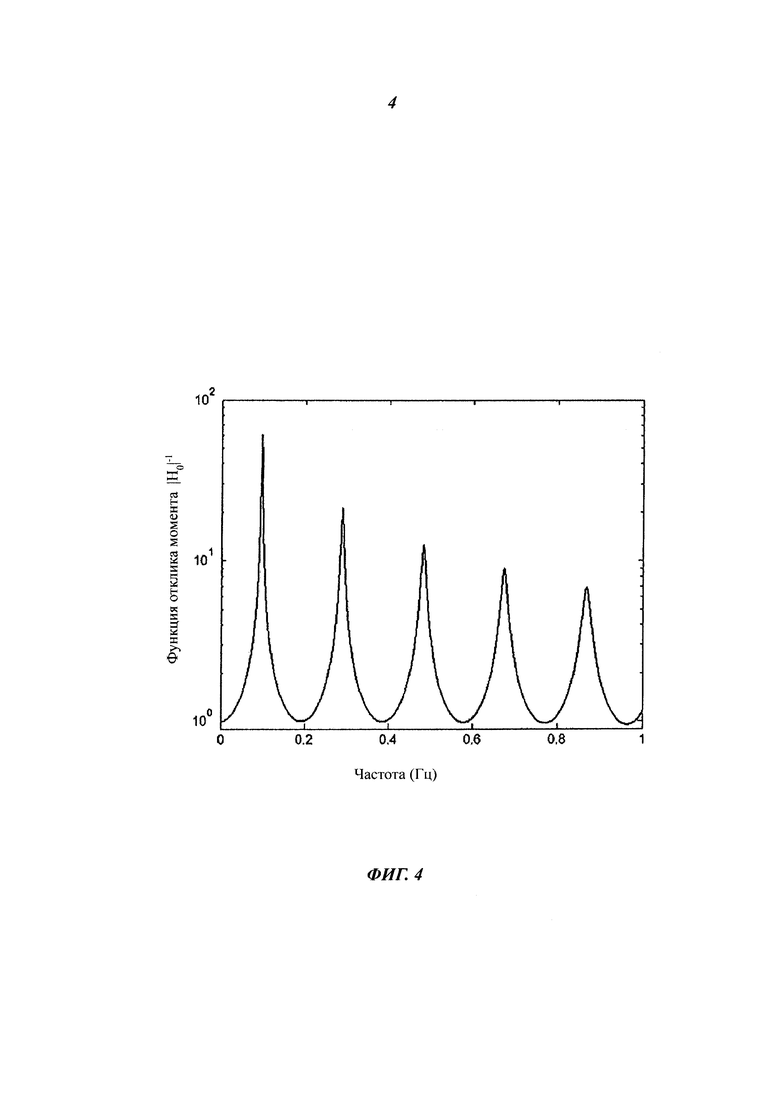
фиг. 4 изображает график, на котором показана зависимость отклика момента от частоты;
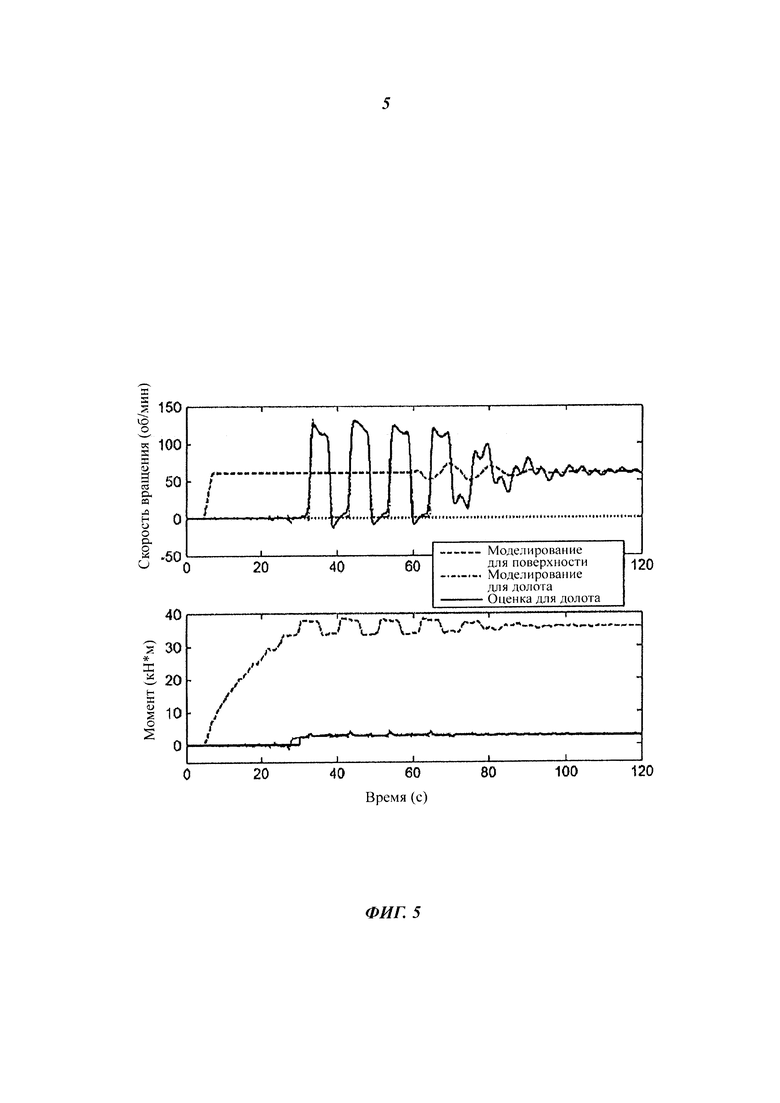
фиг. 5 изображает график, на котором показана зависимость моделируемых и расчетных (оценочных) внутрискважинных параметров от времени;
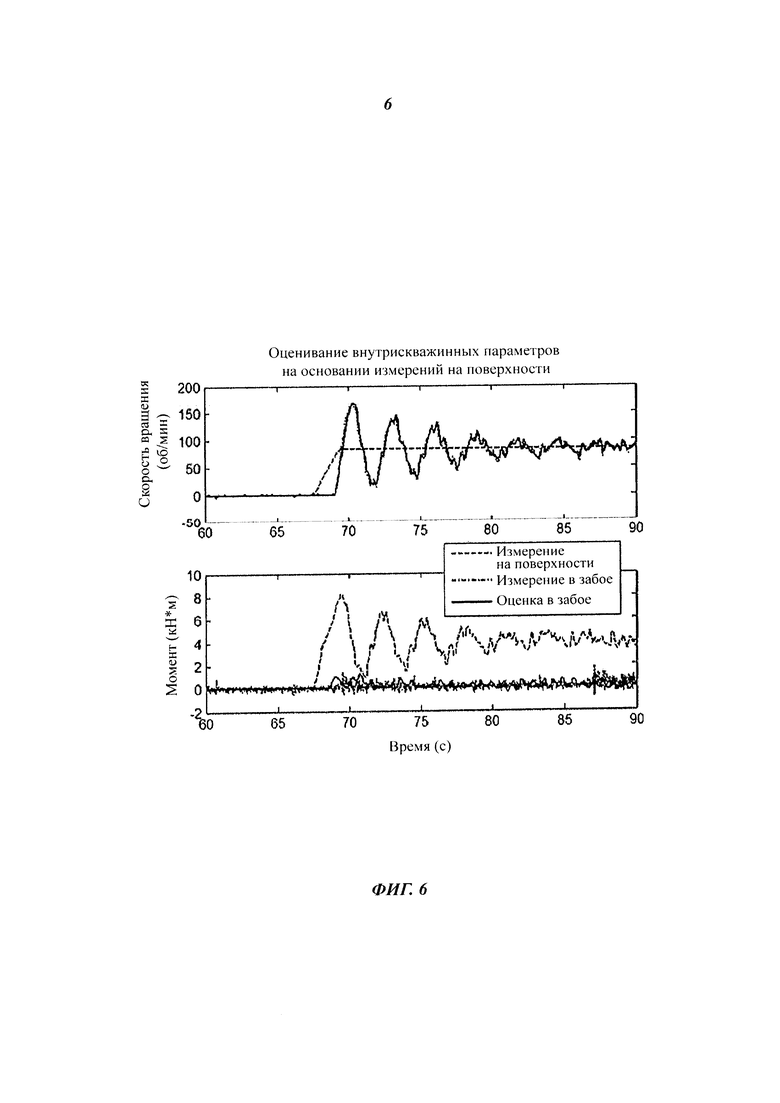
фиг. 6 изображает график, на котором показана зависимость моделируемых и расчетных (оценочных) внутрискважинных параметров от времени; и
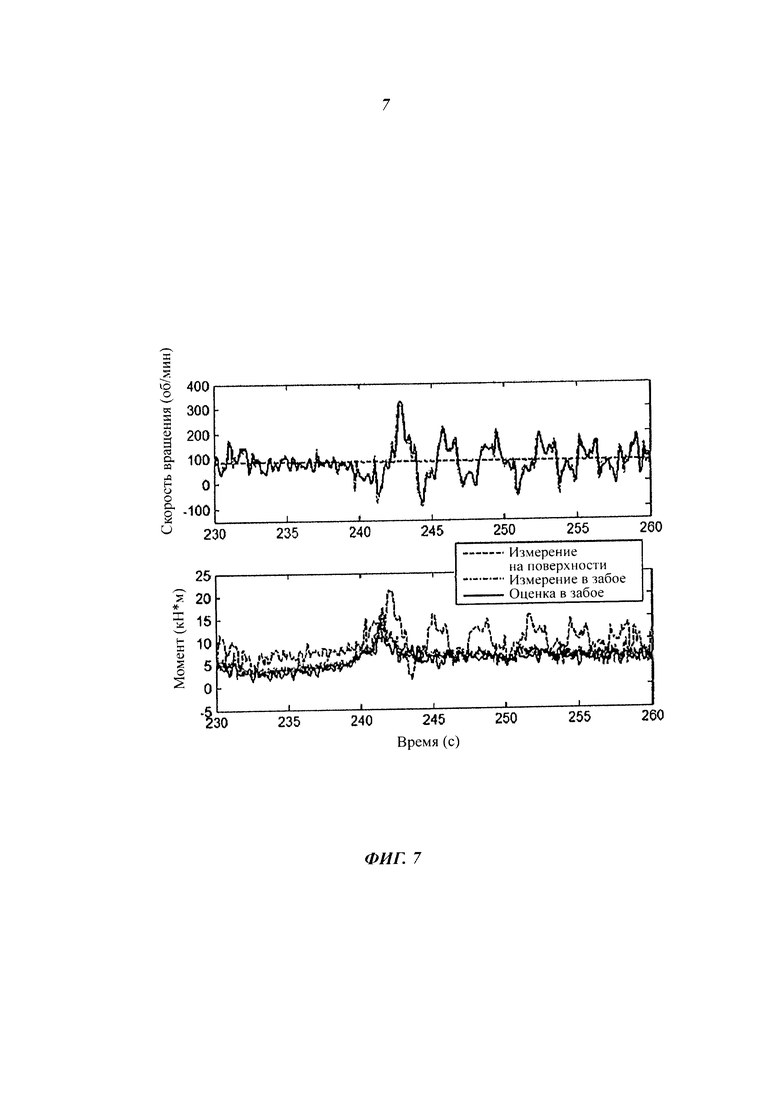
фиг. 7 изображает зависимость расчетных (оценочных) и измеренных внутрискважинных параметров от времени в процессе бурения.
Один возможный алгоритм для практического осуществления
Фиг. 1 схематически в упрощенном виде изображает систему 1, соответствующую настоящему изобретению. Показано, что на буровой установке 11 предусмотрены средства 3 для приведения в движение бурильной колонны. Средства 3 для приведения в движение бурильной колонны содержат электрический верхний силовой привод (ВСП) 31 для вращения бурильной колонны 13, и буровую лебедку 33 для спуска-подъема бурильной колонны 13 в стволе 2 скважины, пробуренном в грунте 4 посредством бурового долота 16. ВСП 31 соединен с бурильной колонной 13 через передаточный механизм 32 и выходной вал 34. Управляющее устройство 5 связано со средствами 3 для приведения в движение бурильной колонны, при этом управляющее устройство 5 связано со средствами 7 измерения скорости для измерения как вращательной, так и осевой скорости движения бурильной колонны 13, и средствами 9 измерения усилий для измерения крутящего момента и силы натяжения бурильной колонны 13. В изображенном варианте осуществления изобретения и средства 7 измерения скорости и средства 9 измерения усилий встроены в ВСП 31, и через беспроводной канал обмена данными подключены к управляющему устройству 5. Средства 7, 9 измерения скорости и усилий могут содержать один или более соответствующих датчиков, которые хорошо известны специалистам в данной области. Скорость вращения можно измерять в верхней части бурильной колонны 13 или на ВСП 31, учитывая передаточное отношение механизма 32. Крутящий момент можно измерять в верхней части бурильной колонны 13 или на ВСП 31, учитывая влияние инерции, о чем шла речь выше. Аналогично силу натяжения и осевую скорость можно измерять в верхней части бурильной колонны 13 или в буровой лебедке 33, учитывая инерцию движущейся массы и упругость буровых канатов, о чем также шла речь выше. Средства 7, 9 измерения скорости и усилий могут дополнительно содержать датчики для измерения давления бурового раствора и расхода в бурильной колонне 13, о чем говорилось ранее. Управляющее устройство 5, которое может представлять собой программируемый логический контроллер (ПЛК) или подобное устройство, приспособленное для исполнения следующего алгоритма, который представляет предпочтительный вариант осуществления изобретения, применяемый к крутильным колебаниям и к любому выбранному положению на колонне, 0<х≤xn. Предполагается, что осуществляется точное измерение выходного крутящего момента и скорости вращения ВСП либо напрямую, либо косвенно при помощи средств 7, 9 измерения скорости и усилий. Также предполагается, что данные сигналы подвергаются надлежащей предварительной обработке. Предварительная обработка сигналов в данном случае означает, что 1) производится синхронная выборка сигналов без временного сдвига между сигналами; 2) производится надлежащая сглаживающая фильтрация посредством аналоговых и/или цифровых фильтров; и 3) при желании производится прореживание до удобной частоты выборки, обычно 100 Гц.
1) Выбирают постоянное временное окно tw обычно равное наименьшему периоду собственных колебаний бурильной колонны и число (целое) ns выборок, что будет служить базовым периодом для последующего Фурье-анализа.
2) Аппроксимируют колонну рядом однородных секций, и вычисляют передаточные функции Mx,0, Z1Mx,1, Нх,0 и Z1Hx,1 для положительных кратных величин ƒ1=1/tw. Полагают функции равными нулю для частоты ƒ=0 и, при желании, для частот выше выбранной полосы fbw.
3) Запоминают сигналы момента и скорости, записанные на поверхности, в кольцевой буферной памяти, сохраняя последние ns выборок для каждого сигнала.
4) Применяют преобразование Фурье к буферным данным по скорости и моменту; умножают результаты на соответствующие передаточные функции, чтобы определить скорость в забое и крутящий момент в частотной области; применяют обратное преобразование Фурье и берут центральные выборки величин, подвергнутых обратному преобразованию.
5) Суммируют среднюю скорость на поверхности с оценкой динамической скорости, и зависящий от положения средний момент - с оценкой динамического момента.
6) Повторяют последние две операции для каждого нового обновления данных в кольцевых буферах.
Данный алгоритм не следует рассматривать, как алгоритм ограничивающий объем изобретения. Специалисту в данной области должно быть понятно, что один или более шагов из вышеприведенного алгоритма могут быть изменены или даже исключены из алгоритма. Оценки величин могут быть дополнительно использованы в качестве входного сигнала для управляющего устройства 5 в целях управления ВСП 31, обычно через непоказанный контроллер силового привода и скорости, как например раскрыто в документах WO 2013112056, WO 2010064031 и WO 2010063982, права на которые принадлежат заявителю настоящего изобретения, а также в документах US 5117926 и US 6166654, права на которые принадлежат компании Shell International Research.
Испытание и проверка эффективности
Раскрытые выше способы испытаны и подтверждена их эффективность двумя способами, которые будут рассмотрены ниже.
Для испытания описанного способа была использована комплексная математическая модель колонны и верхнего силового привода. Модель аппроксимирует непрерывную бурильную колонну посредством ряда элементов с сосредоточенной массой и торсионных пружин. Данная модель включает в себя модель нелинейного трения в стволе скважины и модель момента на долоте. Колонна, использованная для данного испытания, представляет собой двухсекционную колонну длиной 7500 м, состоящая из секции длиной 7400 м из буровых труб диаметром 127 мм, и секции длиной 100 м из утяжеленных труб в качестве КНБК. Использованы 20 элементов равной длины, что означает, что модель неплохо обрабатывает частоты до 2 Гц. Ствол скважины имеет сильное отклонение (отклонение на 80° от глубины 1500 м и далее) обеспечивая высокий момент трения и закручивание, когда колонна вращается. Рассматривался случай, когда х=xbit=1500 м.
Различные передаточные функции изображены на фиг. 2 и фиг. 3, где они представлены в виде графиков зависимости их действительной и мнимой части от частоты. Отдельные кривые для действительных и мнимых частей, как альтернатива более общепринятым кривым Боде (которые изображают зависимость амплитуды и фазы от частоты) дают некоторые преимущества. Одно преимущество состоит в том, что эти кривые гладкие и непрерывные, в то время как фаза часто имеет разрыв. Однако легко преобразовать один вид представления в другой, используя хорошо известное тождество для функции комплексной переменной:  .
.
На фиг. 2 изображены графики зависимости действительных и мнимых частей приведенных мобильностей m0=Mx,0Z1 и m1=Mx,1Z1 от частоты. Взаимные мобильности Mx,0 и Мх,1 определяются уравнением (19), а коэффициент характеристического импеданса введен, чтобы сделать m0 и m1 безразмерными. Короче говоря, первая мобильность представляет отношение амплитуды скорости вращения в забое к амплитуде момента на поверхности для особого случая, когда вариации скорости ВСП отсутствуют. Для низких частот (<0,2 Гц) в m0 доминирует его мнимая часть. Это означает, что момент на ВСП и скорость вращения долота сдвинуты по фазе друг относительно друга (грубо - на 90°). Вторую мобильность m1 можно рассматривать, как поправку к первой мобильности, когда мобильность ВСП не равна нулю, то есть, когда имеют место значительные вариации скорости верхнего силового привода.
Аналогично, на фиг. 3 изображены различные части передаточных функций момента Н0 и Н1. Эти функции представляют собой сокращенные версии передаточных функций Нх,0 Нх,1, определяемых уравнением (20) (но идентичных указанным функциям). Первая функция Н0 представляет отношение амплитуды момента в забое к амплитуде момента на поверхности, когда со стороны долота действует возмущение, а верхний привод демонстрирует бесконечную жесткость (обладает нулевой мобильностью). Следует отметить, что эта функция главным образом является действительной для низких частот, причем действительная часть пересекает нуль на частоте около 0,1 Гц. Вторая передаточная функция Н1 также является поправочным коэффициентом, который должен быть использован, когда податливость ВСП не равна нулю. Как m1 так и H1 представляют собой важные поправки, которыми пренебрегают в технических решениях существующего уровня.
Стоит упомянуть, что все изображенные графически передаточные функции - взаимной податливости и взаимного момента - не выражают причинную обусловленность. Это означает, что, когда их умножают на переменные отклика, они стремятся дать оценку тому, что происходило в забое перед тем, как был обнаружен отклик на поверхности. Это кажущееся нарушение принципа причинности разрешается тем фактом, что оценки переменных забоя, основанные на измерениях на поверхности, задерживаются на половину временного окна tw/2, что существенно дольше, чем типичное время отклика.
Половина изображенных компонент, некоторые действительные и некоторые мнимые, имеют очень низкий уровень на низких частотах, но медленно растут по величине, когда частота увеличивается. Эти компоненты представляют затухание вдоль колонны. Они также ограничивают обратные передаточные функции (выражающие причинную обусловленность), когда доминирующая компонента пересекает нуль.
На фиг. 4 представлен график обратного момента |H0|-1, чтобы показать резонансы в колонне при нулевой мобильности ВСП. Самый нижний резонансный пик находится на частоте 0,096 Гц, что соответствует периоду собственных колебаний 10,4 с. Уменьшение высоты пиков и увеличение ширины резонансных пиков на более высоких частотах отражает тот факт, что смоделированное затухание увеличивается с частотой.
Результат моделирование поведения колонны во времени показан на фиг. 5. Фиг. 5 показывает сравнение смоделированных «истинных» скоростей и моментов в забое с соответствующими параметрами, которые оцениваются при помощи вышеприведенного способа. Испытательный прогон состоит из трех фаз, при этом все фазы соответствуют колонне над забоем и отсутствию момента на долоте. Первая фаза описывает начало вращения, когда верхний силовой привод, после короткого времени разгона, вращается с постоянной скоростью 60 об/мин. Момент, измеряемый на поверхности, увеличивается, в то время как колонна скручивается, пока нижний конец не высвободится в момент времени около 32 с. Следующая фаза - это фаза прерывистого скольжения, при которой скорость вращения в забое изменяется практически от 0 до 130 об/мин, что более, чем в два раза превышает среднюю скорость. Эти колебания в фазе прерывистого скольжения возникают благодаря сочетанию момента нелинейного трения, высокой податливости колонны в отношении кручения, и низкой мобильности верхнего силового привода (жесткое управление). В момент времени 60 с регулятор скорости верхнего привода переключается на режим мягкого управления (высокая мобильность), который обеспечивает приведенную мобильность верхнего привода на уровне 0,25 при частоте прерывистого скольжения. Эта высокая подвижность, какую можно наблюдать, как большие переходные изменения скорости, вызывает затухание крутильных колебаний, что и являлось целью применения способа.
Указанные смоделированные данные для поверхности обрабатывают вышеописанным алгоритмом, чтобы получить оценки скорости вращения и момента в забое, основываясь на данных, полученных на поверхности. Выбранное базовое временное окно составляет 10,4 с, что равно наименьшему периоду резонансных колебаний. Специальная логика, о которой было кратко упомянуто выше, используется для исключения внутрискважинных вариаций, прежде чем момент на поверхности не пересечет свое среднее значение при вращении над забоем (38 кН*м) в первый раз. Если такую логику не применять, то оцениваемый параметр содержал бы большие ошибки из-за того, что момент трения в стволе скважины не является постоянным, а сильно изменяется во время скручивания колонны.
Совпадение оцениваемой скорости долота и моделируемой скорости почти идеальное за исключением периодов залипания, когда моделируемая скорость равна нулю. Это расхождение не удивительно, поскольку момент трения в нижней (залипающей) части колонны не является постоянным, как это предполагает способ оценивания. При моделировании оцениваемый момент в забое - это не момент на долоте, а момент при х=7125 м, что является глубиной в области стыка между двумя самыми нижними элементами. Причина того, что не используется момент на долоте, заключается в том, что моделирование выполнялось для случая, когда долото отведено от дна забоя, и таким образом, момент на долоте не создавался.
Новый способ также был проверен на высококачественных данных натурных исследований, включая синхронизированные данные на поверхности и в забое. Длина колонны составляла 1920 м, при этом ствол скважины был практически вертикальный на этой глубине. Испытаниям соответствуют фиг. 6 и 7. Фиг. 6 демонстрирует результаты во время пуска вращения колонны, когда долото отведено от дна. Кривые, изображенные штриховой линией, представляют соответственно скорость и момент, измеренные на поверхности, в то время как кривые, изображенные штрих-пунктирной линией, представляют соответствующие параметры, измеренные в забое. Данные измерений в забое собирались посредством устройства с памятью, которое называется расширенной измерительной системой (РИС), которая располагалась вблизи нижнего конца колонны. Черные жирные линии представляют величины в забое, оцененные посредством рассмотренного выше способа, но основанные только на двух измерениях на поверхности и геометрии колонны. Фиг. 7 изображает те же самые параметры на протяжении аналогичного временного интервала, несколькими минутами позднее, когда долото вращается на дне. Испытуемая колонна имела в своем составе гидравлический забойный двигатель (ГЗД), при этом предполагается, что скорость долота равна сумме скорости вращения колонны и скорости ГЗД. Повышенный уровень момента, наблюдаемый на фиг. 7, вызван приложенной к долоту нагрузкой (как аксиальной силой, так и моментом). Как измеренные, так и оцениваемые скорости демонстрируют крайне большие вариации в интервале от - 100 об/мин до почти 400 об/мин. Эти вариации инициируются и объясняются нерегулярными и сильными бросками момента на долоте. Эти броски вероятно заставляют долото временно залипать, в то время как ГЗД продолжает вращение, и заставляет колонну, которая находится выше его, вращаться в обратную сторону.
Хорошее совпадение измеренных и оценочных скорости и момента в забое, которые получены как при проверке на модели, так и при натурных исследованиях является хорошим подтверждением правильности нового способа оценивания.
Раскрыт способ для оценивания внутрискважинных скоростных и силовых параметров в произвольном месте движущейся бурильной колонны на основании данных измерения тех же параметров на поверхности, причем способ содержит этапы, на которых: а) используют геометрию и упругие свойства бурильной колонны для расчета передаточных функций, описывающих зависящие от частоты амплитудные и фазовые соотношения между взаимными комбинациями скоростных и силовых параметров на поверхности и в забое; b) выбирают базовый период времени; с) измеряют, напрямую или косвенно, скоростные и силовые параметры на поверхности, предварительно обрабатывают указанные измеренные данные путем применения сглаживающих и/или прореживающих фильтров и сохраняют предварительно обработанные данные в средствах хранения данных, которые выполнены с возможностью хранения предварительно обработанных данных измерений на поверхности по меньшей мере на протяжении последнего завершившегося базового периода времени; d) при обновлении содержимого средств хранения данных вычисляют внутрискважинные параметры в частотной области путем применения интегрального преобразования, такого как преобразование Фурье, к параметрам, полученным на поверхности, перемножают результаты с указанными передаточными функциями, применяют обратное интегральное преобразование к суммам связанных членов и выявляют точки в указанных базовых периодах времени, чтобы получить задержанные по времени оценки динамических параметров скорости и силы, также раскрыта система для реализации указанного способа. 2 н. и 13 з.п. ф-лы, 7 ил.
1. Способ оценивания величин скоростных и силовых параметров в произвольном месте движущейся бурильной колонны (13) на основании данных измерения тех же параметров на поверхности, отличающийся тем, что содержит этапы, на которых:
a) используют геометрию и упругие свойства бурильной колонны (13) для расчета передаточных функций, описывающих зависящие от частоты амплитудные и фазовые соотношения между взаимными комбинациями указанных скоростных и силовых параметров на поверхности и в забое;
b) выбирают базовый период времени, который может быть длиннее, но, по существу, не короче периода основного резонанса бурильной колонны;
c) измеряют, напрямую или косвенно, скоростные и силовые параметры на поверхности, обрабатывают указанные измеренные данные и сохраняют обработанные данные в средствах хранения данных, которые выполнены с возможностью хранения предварительно обработанных данных измерений на поверхности по меньшей мере на протяжении последнего истекшего базового периода времени;
d) при обновлении содержимого средств хранения данных вычисляют внутрискважинные параметры в частотной области путем применения интегрального преобразования, такого как дискретное преобразование Фурье, к величинам, полученным на поверхности, перемножают результаты с указанными передаточными функциями, применяют обратное интегральное преобразование к суммам связанных членов и выявляют точки в указанных базовых периодах времени, чтобы получить задержанные по времени оценки динамических параметров скорости и силы.
2. Способ по п. 1, отличающийся тем, что оценивание указанных скоростных и силовых параметров предполагает оценивание общих величин, представляющих одну или более следующих пар:
- крутящий момент и скорость вращения;
- сила натяжения и осевая скорость и
- давление и расход.
3. Способ по п. 1 или 2, отличающийся тем, что дополнительно содержит этап прибавления средних значений к указанным оценкам динамической скорости и силы.
4. Способ по п. 1 или 2, отличающийся тем, что этап а) содержит аппроксимацию указанной бурильной колонны (13) посредством ряда однородных участков.
5. Способ по п. 1 или 2, отличающийся тем, что этап с) содержит сохранение данных в кольцевых буферах.
6. Способ по п. 1 или 2, отличающийся тем, что этап с) содержит фильтрацию данных, начиная от пуска средств, приводящих бурильную колонну в движение, таких как верхний силовой привод.
7. Способ по п. 6, отличающийся тем, что этап фильтрации данных при пуске содержит задание скорости равной нулю до тех пор, пока средний силовой параметр, такой как средний крутящий момент, не достигнет среднего значения силы, измеренного перед последней остановкой указанных движущих средств бурильной колонны.
8. Способ по любому из пп. 1, 2, 7, отличающийся тем, что этап b) содержит выбор базового периода времени, представляющего величину, обратную основной частоте из ряда гармонических частотных компонентов указанной бурильной колонны.
9. Способ по любому из пп 1, 2, 7, отличающийся тем, что этап d) содержит выявление точек в центре или вблизи центра указанного базового периода времени.
10. Способ по любому из пп. 1, 2, 7, отличающийся тем, что этап а) дополнительно содержит вычисление эффективного характеристического импеданса для выбранной моды бурильной колонны.
11. Способ по п. 10, отличающийся тем, что этап вычисления эффективного характеристического механического импеданса бурильной колонны содержит добавление поправочного коэффициента бурильного замка к параметру импеданса трубы, чтобы учесть бурильные замки в указанной бурильной колонне (13).
12. Способ по п. 11, отличающийся тем, что указанный поправочный коэффициент бурильного замка используют для вычисления волнового числа участка трубы в бурильной колонне (13), при этом к волновому числу добавляют коэффициент затухания, чтобы учесть линейное затухание вдоль бурильной колонны.
13. Способ по п. 12, отличающийся тем, что учет линейного затухания содержит добавление коэффициента затухания, зависящего от частоты, и/или коэффициента затухания, не зависящего от частоты.
14. Способ по любому из пп. 2, 7, 11-13, отличающийся тем, что этап с) содержит измерение силы натяжения и осевой скорости в месте крепления неподвижного конца и/или барабана буровой лебедки и учет инерции движущейся массы перед сохранением данных в указанных средствах хранения данных.
15. Система (1) для оценивания внутрискважинных скоростных и силовых параметров в произвольном месте движущейся бурильной колонны (13) на основании данных измерения тех же параметров на поверхности, содержащая:
- движущие средства (3) бурильной колонны для обеспечения движения бурильной колонны (13) в стволе (2) скважины;
- средства (7) измерения скорости для измерения скорости на поверхности или вблизи поверхности у ствола скважины;
- средства (9) измерения силы для измерения силы на поверхности или вблизи поверхности у ствола скважины;
- управляющее устройство (5) для выборки, обработки и сохранения, по меньшей мере временного, данных, собранных от указанных средств (7, 9) измерения скорости и силы,
отличающаяся тем, что управляющее устройство (5) дополнительно предназначено для:
- использования геометрии и упругих свойств указанной бурильной колонны (13) для вычисления передаточных функций, описывающих зависящие от частоты амплитудные и фазовые соотношения между взаимными комбинациями указанных скоростных и силовых параметров на поверхности и в забое;
- выбора или получения базового периода времени в качестве входного параметра;
- обработки данных, собранных при помощи средств (7, 9) измерения скорости и силы, и сохранения обработанных данных измерения на поверхности по меньшей мере на протяжении последнего истекшего базового периода времени; и
- при обновлении указанных сохраненных данных вычисления внутрискважинных параметров в частотной области путем применения интегрального преобразования, такого как преобразование Фурье, параметров с поверхности, перемножения результатов с указанными передаточными функциями, применения обратного интегрального преобразования к суммам связанных членов и выявления точек в указанном базовом периоде времени, чтобы получить задержанные по времени оценки динамических параметров скорости и силы.
| US 20120123757 A1, 17.05.2012 | |||
| Пропашник для свекловичных полей | 1926 |
|
SU7498A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ В СКВАЖИНЕ И СИСТЕМА БУРЕНИЯ СКВАЖИНЫ | 2003 |
|
RU2244117C2 |
| Календарь | 1927 |
|
SU8978A1 |
| WO 2013112056 A1, 01.08.2013. | |||

