Изобретение относится к установке для обработки окунанием, прежде всего окрашивания окунанием, предметов, прежде всего, автомобильных кузовов, с
а) по меньшей мере одной погружной ванной, которая выполнена с возможностью заполнения технологической жидкостью до определенного уровня,
б) транспортной системой, с помощью которой подлежащие обработке предметы имеют возможность перемещения к погружной ванне, в нее, из нее и от нее, и имеет направляющее устройство, а также по меньшей мере одну выполненную с возможностью перемещения вдоль направляющего устройства транспортную тележку, которая, в свою очередь, включает в себя:
ба) приводной двигатель для траверсного перемещения вдоль направляющего устройства,
бб) удерживающую раму, которая выполнена с возможностью закрепления на ней по меньшей мере одного предмета,
бв) имеющее по меньшей мере одну ось вращения или поворота окунающее устройство, на котором закреплена удерживающая рама,
в) управляющее устройство, в котором записана заданная траектория окунания для закрепленного на удерживающей раме предмета и которое управляет движением закрепленного на удерживающей раме предмета.
Устаревшие установки для окрашивания окунанием автомобильных кузовов в качестве транспортной системы используют транспортер периодического действия. В нем каждый автомобильный кузов удерживался двумя маятниковыми подвесами на одних, соединяющих нижние концы маятникового подвеса салазках. Маятниковые подвесы, в свою очередь, были закреплены на транспортной цепи, траектория высоты которой задавала соответствующее местное вертикальное положение транспортируемого автомобильного кузова. В таких частично до сих пор еще эксплуатируемых установках из-за описанной конструкции не существовало опасности того, что транспортируемый автомобильный кузов столкнется с твердой, соседствующей с его траекторией движения структурой, например стенкой погружной ванны, или расположенными между двумя погружными ваннами технологическими устройствами, например распылителями. Особых мер безопасности для этого не требовалось.
Похожая ситуация действительна и для описанной в DE 19641048 A1 установки для обработки окунанием, в которой соответственно каждая несущая автомобильный кузов поворотная тележка посредством цепей протягивалась вдоль системы направляющих и с помощью механической направляющей кулисы принудительно вводилась с вращением в погружную ванну и снова выводилась с вращением из нее. Здесь также столкновение обрабатываемого автомобильного кузова с расположенной рядом с траекторией движения твердой структурой было возможно только в исключительных случаях, в которых отказывает одно из механических направляющих устройств.
Поскольку как работающие с транспортером периодического действия установки для обработки окунанием, так и те, которые описаны в DE 19641048 A1, имеют относительно небольшую гибкость, в последнее время все большее значение приобрели установки для обработки окунанием названного в начале типа, как они описаны, например, в DE 10103837 В4 или же в DE 10029939 C1. Такие установки для обработки окунанием имеют общность в том, что они используют выполненные с возможностью независимого перемещения, снабженные собственными приводными двигателями транспортные тележки, которые удерживаемый ими предмет посредством окунающего устройства окунают в погружную ванну и снова вынимают из нее. При этом движение окунания включает в себя по меньшей мере одно вращательное или качательное движение относительно по меньшей мере одной оси вращения или качания. Линейное движение транспортной тележки вдоль соответствующего направляющего устройства, а также движение окунания имеют возможность независимого от соответствующих движений других транспортных тележек в установке управления. Таким способом получается гибкость всей системы, которая была недостижима в устаревших, прежде всего, использующих транспортные цепи установках.
Но уменьшенное количество механических принудительных направляющих, воздействию которых подлежат выполненные с возможностью самостоятельного перемещения транспортные тележки, увеличивает опасность того, что при определенных системных ошибках, прежде всего, ошибках управления и программных ошибках, подлежащий обработке предмет столкнется с твердой, находящейся по соседству с траекторией движения структурой, прежде всего стенкой погружной ванны.
Задачей данного изобретения является разработка установки названного вначале типа таким образом, что опасность столкновения подлежащего обработке предмета с твердой, находящейся на траектории движения структурой является практически исключенной.
В соответствии с изобретением эта задача решена тем, что:
г) предусмотрена система исключения столкновений, которая включает в себя:
га) для любой возможной степени свободы движения закрепленного на удерживающей раме предмета измеряющий абсолютное значение датчик измерения положения,
гб) запоминающее устройство, в котором сохранена траектория первой граничной поверхности или граничной линии, которая отображает траекторию твердой структуры вдоль траектории движения предмета,
гв) запоминающее устройство, в котором сохранена траектория второй граничной поверхности или граничной линии, которая проходит на расстоянии от первой граничной поверхности или граничной линии, при этом между первой граничной поверхностью или граничной линией и второй граничной поверхностью или граничной линией образована зона защиты от столкновений,
гг) запоминающее устройство, в котором сохранена траектория контура, который представляет траекторию контура закрепленного на удерживающей раме предмета,
при этом
д) управляющее устройство на основании поступающих в него от датчиков измерения положения сигналов и сохраненных данных о траектории второй граничной поверхности или граничной линии, а также о представляющем закрепленный на удерживающей раме предмет контуре, постоянно или через определенные промежутки времени рассчитывает, вошел ли контур в зону защиты от столкновения или нет, и в первом случае останавливает дальнейшее движение предмета.
Итак, в соответствии с изобретением твердая, находящаяся на траектории движения предмета структура, представленная посредством по меньшей мере приближенной к данному контуру граничной поверхностью или граничной линией, окружается зоной защиты от столкновений, пересечение физически не существующей граничной поверхности или граничной линии которой запрещено контуру, который представляет траекторию контура закрепленного на удерживающей раме предмета. Под "представлением" здесь понимается приближение к точной геометрии, которое может быть выполнено, например, по типу полигональной линии. Если имеющийся в виду контур вторгается в зону защиты от столкновений, то дальнейшее движение предмета немедленно останавливается и, при необходимости, подается сигнал тревоги. Таким образом можно надежно избежать грозящего столкновения.
В общем случае транспортная тележка в боковом направлении направляется настолько хорошо, что в этом направлении не требуется принимать специальных мер для исключения столкновений. Достаточно лишь двухмерного рассмотрения в вертикальной, включающей транспортное направление плоскости, например в вертикальной центральной плоскости подлежащего обработке предмета. Это облегчает сохранение в памяти важных геометрий и снижает вычислительную нагрузку при проверке столкновений.
Целесообразно, если управляющее устройство перемещается вместе с транспортной тележкой. Таким способом уменьшаются временные задержки, связанные с передачей информации.
Предпочтительно, предусмотрено устройство верификации, которое верифицирует корректность работы датчиков измерения положения. Из-за серьезных повреждений, которые могут возникнуть при столкновении подлежащего обработке предмета с твердой структурой, необходимо, чтобы система предотвращения столкновений работала надежно, прежде всего, чтобы датчики измерения положения, на которых основана система, работали корректно. Это должно обеспечить соответствующее изобретению устройство верификации.
Устройство верификации может включать в себя по меньшей мере для части датчиков измерения положения дублирующий аналогичный датчик измерения положения. До тех пор, пока оба связанных друг с другом датчика измерения положения выдают показания по существу в пределах окна допуска, можно говорить о корректном функционировании датчиков измерения положения. Если оба выходных сигнала сильно различаются, следует предположить наличие ошибки и также остановить движение предмета.
Устройство верификации по меньшей мере для части датчиков измерения положения может включать в себя и стационарные устройства, мимо которых закрепленный на удерживающей раме предмет проводится по меньшей мере один раз, и где его положение определяется независимо. В этом случае устройство верификации работает не постоянно, а через определенные промежутки времени, и всегда в тот момент, когда удерживающая рама с закрепленным на ней предметом проводится мимо него. В общем случае этого достаточно, чтобы своевременно обнаружить ошибку в датчике измерения положения.
Названное стационарное устройство может включать в себя, например, фоторелейный барьер, луч которого в определенном положении подлежащего обработке предмета прерывается или открывается, или ультразвуковой датчик или срабатывающий на металл датчик или линейную сканирующую систему или тому подобное.
Особо целесообразно, если ширина зоны защиты от столкновений является функцией скорости. Таким способом учитывается, что путь, который проходит подлежащий обработке предмет между обнаружением возможно ведущей к столкновению ошибки и остановкой движения предмета, растет с увеличением скорости предмета.
В этом случае нужно по возможности предусмотреть систему распознавания типа кузова, которая автоматически определяет тип обрабатываемого в данный момент автомобильного кузова. Она может включать в себя, например, несколько фоторелейных барьеров, мимо которых проводится автомобильный кузов горизонтальным и вертикальным движением, или система обработки изображений или кодов.
Далее пример выполнения изобретения подробнее разъясняется на основании чертежа. Показано:
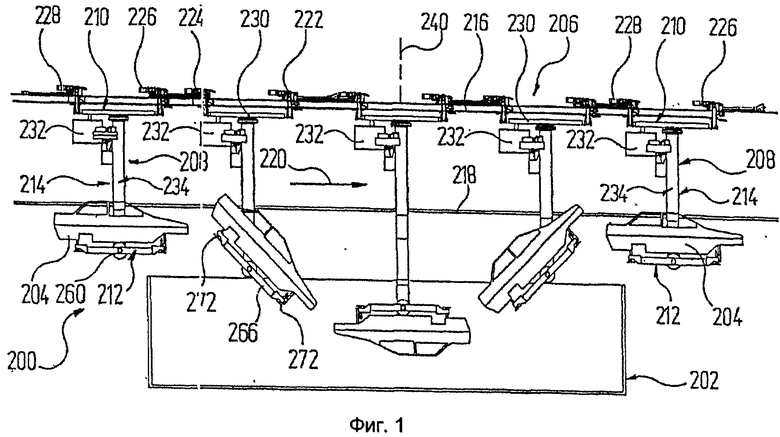
Фигура 1 - в виде сбоку катафорезная установка для обработки окунанием автомобильных кузовов,
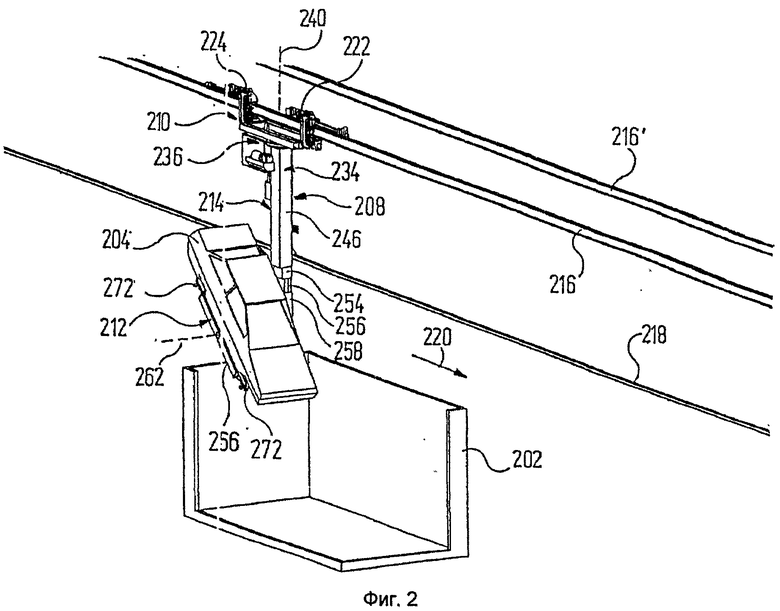
Фигура 2 - перспективное изображение транспортной тележки, как она используется в установке окрашивания окунанием на фигуре 1, с автомобильным кузовом во время процесса окунания в погружную ванну,
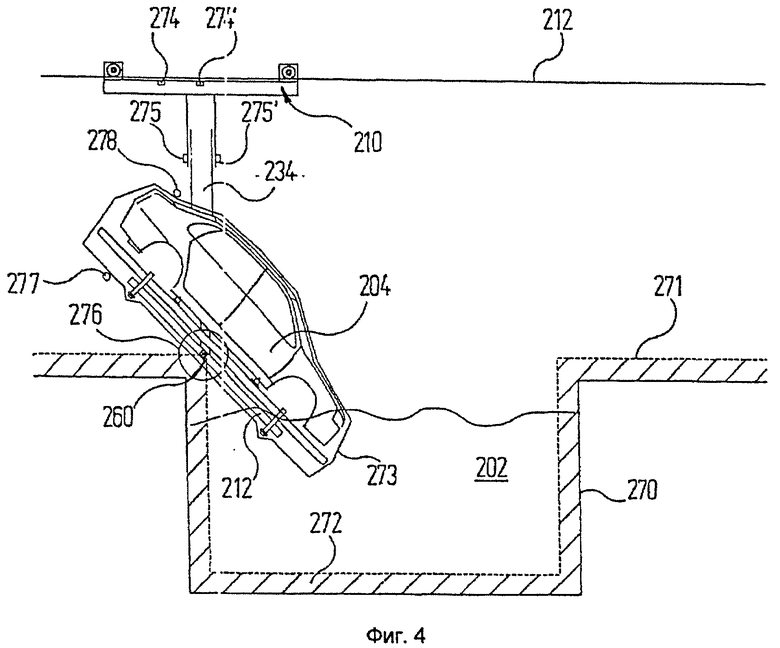
Фигура 3 - схематичный вид сбоку фрагмента установки окрашивания окунанием на фигуре 1, настроенной на предотвращение столкновений, при этом опасность столкновения для закрепленного на транспортной тележке автомобильного кузова отсутствует,
Фигура 4 - схожий с фигурой 3 вид, однако здесь перемещаемый транспортной тележкой автомобильный кузов подвержен опасности столкновения.
Сначала обратимся к фигурам 1 и 2. Изображенная на них и обозначенная общим ссылочным обозначением 200 катафорезная установка для окрашивания окунанием представляет собой лишь пример выполнения установки для окрашивания окунанием, в которой применяется соответствующая изобретению система предотвращения столкновений. Она включает в себя наполненную жидкой краской погружную ванну 202. Частицы краски в электрическом поле, которое создано между автомобильными кузовами 204, и анодами, которые расположены вдоль пути перемещения автомобильных кузовов 204 и для наглядности не показаны, перемещаются к автомобильным кузовам 204 и оседают на них.
Автомобильные кузова 204 с помощью транспортной системы 206 направляются через установку и, прежде всего, через погружную ванну 202 и находящуюся там краску. Она включает в себя множество транспортных тележек 208, которые, со своей стороны, имеют ведущую тележку 210 и несущую раму 212, которые соединены друг с другом посредством детально описанного далее телескопического устройства 214.
Над погружной ванной 202 простирается приводная направляющая 216, такая как используется в стандартных электрических подвесных дорогах. Направление движения, в котором автомобильные кузова 204 подаются транспортной системой 206, показано на фигуре 1 стрелкой 220. Приводная направляющая 216 смещена наружу относительно центра погружной ванны 202 в направлении, перпендикулярном плоскости чертежа фигуры 1.
Ведущая тележка 210 представляет собой конструкцию, принцип которой известен из электрических подвесных дорог. Каждая из этих ведущих тележек 210 имеет опережающий по направлению движения 220 ходовой механизм 222, на профессиональном языке называющийся "предшественник", а также догоняющий по направлению движения 220 дополнительный ходовой механизм 224, который на профессиональном языке называется "последыш". Предшественник 222 и последыш 224 известным способом оснащены направляющими и опорными роликами, которые здесь не имеют собственного ссылочного обозначения, и прокатываются по различным поверхностям I-образного профиля приводной направляющей 116. Как минимум один из роликов предшественника 222 или последыша 224 служит в качестве приводного ролика и для этого выполнен с возможностью вращения посредством электродвигателя 226 или 228.
Предшественник 222 и последыш 224 каждой ведущей тележки 210 соединены друг с другом посредством соединительной рамы 230. Она, опять же известным образом, несет на себе управляющее устройство 232, которое может поддерживать связь с центральной системой управления установки 200 для окрашивания погружением и, при необходимости, с управляющими устройствами 232 других, имеющихся в установке 200 для окрашивания погружением ведущих тележек 210. Таким образом возможно в значительной степени независимое движение различных транспортных тележек 208 и расположенных на них подвижных частей.
Телескопическое устройство 214, которое соединяет ведущую тележку 210 с несущей рамой 212, включает в себя трехсекционный, проходящий вертикально телескопический рычаг 234, который выполнен с возможностью изменять свою длину. Он имеет верхнюю телескопическую секцию 246, среднюю телескопическую секцию 254, а также нижнюю телескопическую секцию 256, которые выполнены с возможностью относительного смещения друг относительно друга. Требуемые для этого, управляемые управляющим устройством 232 двигатели не показаны.
В нижней свободной концевой зоне 258 нижней телескопической секции 256 подвешена поворотная цапфа 260. Она задает показанную на фигуре 2 горизонтальную ось 262 вращения. Поворотная цапфа 260 посредством ведомого телескопической секцией 256, не показанного на чертеже приводного двигателя 264, который управляется посредством управляющего устройства 232 транспортной тележки 208, может проворачиваться относительно оси 262 вращения в обоих направлениях.
Несущая рама 212 известным образом включает в себя два проходящих параллельно друг другу лонжерона 266, из которых на фигурах 1 и 2 виден только соответственно направленный к наблюдателю. По центру они соединены друг с другом посредством поперечной траверсы 270. Поворотная цапфа 260 без возможности вращения жестко соединена с наружной поверхностью лонжерона 266 удерживающей рамы 212. На концах лонжеронов 266 и 268 размещены крепежные средства 272, с помощью которых общеизвестным способом с возможностью снятия можно закрепить подлежащей окраске автомобильный кузов 204 на несущей раме 212.
Таким образом, удерживающая рама 212 удерживается посредством поворотной цапфы 260 только за одну сторону, так что в вертикальной зоне над удерживающей рамой 212 не расположено ни одного компонента транспортной системы 206. Тем самым устраняется опасность загрязнения автомобильного кузова 204 падающей с компонентов транспортной системы 206 грязью, например пылью, маслом или тому подобным.
Как упоминалось выше, телескопические секции 246, 254 и 256 телескопического рычага 234 могут перемещаться относительно друг друга. Для этого поперечные сечения отдельных телескопических секций 246, 254 и 256 так подогнаны друг к другу для того, чтобы среднюю телескопическую секцию 254 в верхней телескопической секции 246 и нижнюю телескопическую секцию 256 в средней телескопической секции 254 можно было направлено перемещать.
"Стандартный" принцип работы описанной выше катафорезной установки 200 для окрашивания окунанием в непрерывном режиме окрашивания заключается в следующем.
Подлежащий окрашиванию автомобильный кузов 204 на фигуре 1 подается по существу в горизонтальной ориентации от станции предварительной обработки, в которой он известным способом путем очистки, обезжиривания и т.д. подготавливается к процессу окраски. При этом телескопические секции 246, 254 и 256 вдвинуты друг в друга, так что телескопический рычаг 234 имеет минимально возможную длину. Ведущая тележка 210 соответствующей транспортной тележки 208 с помощью электродвигателей 226 и 228 подается вдоль приводной направляющей 216 к погружной ванне 202, при этом соответствующая удерживающая рама 212 одновременно перемещается с закрепленным на ней автомобильным кузовом 204 посредством телескопического устройства 214.
Когда транспортная тележка 208 приближается к находящейся на входной стороне торцовой стенке погружной ванны 202, автомобильный кузов 204 прогрессивно опускается, для чего телескопический рычаг 234 раздвигается. Как только передняя часть автомобильного кузова 204 над торцовой стенкой погружной ванны 202 начинает выступать вовнутрь погружной ванны 202, с помощью упомянутого выше приводного двигателя поворотная цапфа 260 и, тем самым, удерживающая рама 212 с закрепленным на ней автомобильным кузовом 204 проворачиваются вокруг оси 262 вращения. В этой фазе общее движение автомобильного кузова 204 следует рассматривать как наложение трех движений, а именно, одного горизонтального линейного движения (стрелка 220) вдоль приводной направляющей 216, одного вертикального линейного движения вдоль продольной оси телескопического рычага 234 и одного вращательного движения вокруг оси 262 вращения поворотной цапфы 260. При этом автомобильный кузов 204 "заворачивается" вокруг торцовой стенки погружной ванны 202 со стороны входа. Соответствующее положение перспективно показана на фигуре 2.
При продолжающемся опускании и продолжающемся вращении автомобильного кузова 204 вокруг оси 262 вращения поворотной цапфы 260 наконец достигается положение, в котором автомобильный кузов 204 стоит по существу вертикально. При этом автомобильный кузов 204 все еще находится относительно близко к торцовой стенке погружной ванны 202 со стороны входа. По мере того, как транспортная тележка 208 движется дальше и, тем самым, расстояние между центром автомобильного кузова 204 и торцовой стенкой погружной ванны 202 со стороны входа растет, поворотная цапфа 260 и с ней автомобильный кузов 204 проворачиваются дальше по часовой стрелке, так что автомобильный кузов 204 начинает лежать на спине. Самое позднее в тот момент, когда автомобильный кузов 204 полностью находится "на спине" и, тем самым, снова горизонтально, автомобильный кузов 204 полностью погружен в жидкую краску.
Затем автомобильный кузов 204 в этом положении с помощью транспортной тележки 208 дальше продвигается через погружную ванну 202, пока он не приблизится к торцовой стенке погружной ванны 202 со стороны выхода.
Затем начинается процесс вынимания автомобильного кузова 204. Он снова представляется наложением трех движений, а именно, горизонтального линейного движения в направлении 220 подачи, вертикального движения вдоль продольной оси телескопического рычага 234, и вращательного движения вокруг оси 262 вращения поворотной цапфы 260. При этом автомобильный кузов 204 при уменьшении длины телескопического рычага 234 и при продолжении поступательного движения удерживающей рамы 212 и при продолжении вращательного движения "обворачивается" вокруг торцовой стенки погружной ванны 202 со стороны выхода, до тех пор, пока в направлении 220 подачи после погружной ванны 202 не будет снова достигнуто горизонтальное положение свежеокрашенного автомобильного кузова 204.
Описанные процессы движения происходят под воздействием программы, которая сохранена в памяти перемещаемого различными транспортными тележками 208 управляющего устройства 232, и, при необходимости, при поддержке расположенного выше по иерархии центрального управления установки 200 для окрашивания окунанием.
Как и в любом техническом устройстве в описанной выше установке 200 для окрашивания окунанием также могут возникать ошибки. Без описанных далее мер они могут привести к столкновениям между подлежащими окраске автомобильными кузовами 204 и твердыми структурами, прежде всего стенками погружной ванны 202. Названные ошибки могут быть ошибками обслуживающего персонала, например неправильно выбранная траектория окунания для соответственно обрабатываемого автомобильного кузова, или ошибками выполненного программирования управляющих устройств 232. Также ошибки могут возникать и при так называемом "ручном перемещении", при котором отдельные транспортные тележки 208 с подвешенными автомобильными кузовами 204 перемещаются под "ручным управлением", то есть без обращения к запрограммированной в управляющем устройстве 232 траектории окунания. Наконец, в различных используемых программах управляющих устройств 232 также могут иметься неопознанные ошибки, которые проявляются в непредсказуемый момент времени при определенных обстоятельствах и могут отрицательно влиять на корректное ведение автомобильных кузовов 204 через установку 200 для окрашивания окунанием.
Поэтому описанная на основании фигур 1 и 2 установка 200 для окрашивания окунанием дополнительно снабжена системой предотвращения столкновений, которая ниже разъясняется на основании фигур 3 и 4.
Данная система предотвращения столкновений состоит из "программной части" и "аппаратной части".
"Программная часть" включает в себя записанную в управляющие устройства 232 различных окунающих тележек 208 программу предотвращения столкновений, которая описанным далее способом вмешивается в "нормальную", работающую в условиях отсутствия сбоев в процессе движения автомобильных кузовов 204 программу для предотвращения грозящего столкновения.
Для этого в различных управляющих устройствах 232 запрограммированы геометрические пропорции как "твердых" стационарных структур установки 200 для окрашивания окунанием, так и структуры подлежащего обработке автомобильного кузова 204. Под "твердыми" структурами понимаются, прежде всего, как различные погружные ванны 202, так и структуры, которые установлены до или после погружных ванн 202 или которые соединяют две погружные ванны 202 друг с другом. Сюда относятся и технологические устройства, например распылители, между двумя погружными ваннами. Их положения могут зависеть от типа обрабатываемого в данный момент автомобильного кузова 204.
Геометрия твердых структур, естественно, как и геометрия автомобильного кузова 204 изначально трехмерная. Но поскольку надежное боковое ведение автомобильного кузова 204 обеспечено приводной направляющей 216, то проблему предотвращения столкновений можно свести к двухмерному рассмотрению в вертикальной, включающей в себя направление 220 движения плоскости, как это примерно показано на фигурах 1, 3 и 4. В этом двухмерном рассмотрении становятся из плоских линий.
Ограничительная линия твердых структур обозначена на фигурах 3 и 4 ссылочным обозначением 270. Как уже упоминалось, она сохранена в памяти различных управляющих устройств 232. И поскольку она, как упомянуто выше, может зависеть от типа обрабатываемого кузова 204, на изображенном участке установки предварительно включено автоматически работающее устройство определения типа кузова. На основании результатов определения выбирается соответственно используемая ограничительная линия 270.
Также сохранена в памяти проходящая параллельно граничной линии твердых структур 270, обращенная к траектории движения автомобильного кузова 204 граничная линия 271 зоны 272 защиты от столкновений, которая находится между этой граничной линией 271 и граничной линией 270 твердых структур.
Ширина зоны 272 защиты от столкновений и, тем самым, расстояние между граничными линиями 271 и 270 может быть неизменным или, при необходимости, также и динамичным. В последнем случае ширина зоны 272 защиты от столкновений увеличивается вместе со скоростью перемещения автомобильного кузова 204. Положение граничной линии 271 рассчитывается управляющими устройствами 232 на основании известного им положения граничной линии 270 твердых структур и без дополнительных мер известной управляющим устройствам 232 скорости движения автомобильных кузовов 204. Под "скоростью движения" автомобильного кузова 204 в простейшем случае можно понимать скорость движения компонента в горизонтальном направлении, здесь наиболее надежным является учет максимальной скорости, которой достигает точка автомобильного кузова 204 при слагаемом из трех типов движений совокупном движении.
Кроме того, в управляющих устройствах 232 сохранена геометрия закрепленных на удерживающей раме 212 автомобильных кузовов 204. Эта геометрия, как показано на фигурах 3 и 4, в использованном здесь двухмерном рассмотрении может быть приближена к охватывающему автомобильный кузов 204 и удерживающую раму 212 полигону 273 или другой, математически заданной огибающей кривой.
"Аппаратная составляющая" системы предотвращения столкновений включает в себя для каждой степени свободы линейного движения транспортной системы 206 по два измеряющих абсолютное значение датчика 274, 274', 275, 275' измерения положения.
Датчики измерения положения линейного движения транспортной тележки 208 вдоль приводной направляющей 216 в направлении стрелки 220 могут работать, например, с помощью кодовых полос, которые проходят вдоль приводной направляющей 216, и их коды соответственно указывают на место, на котором они находятся. Эти коды считываются соответственно двумя считывающими головками 274, 274', которые перемещаются транспортной тележкой 208. Считывающие головки 274, 274' показаны на фигурах 3 и 4 лишь очень схематично.
Работающие по похожему принципу датчики положения со считывающими головками 275, 275' предусмотрены на телескопическом рычаге 234 для регистрации вертикального движения. Показанные на фигурах 3 и 4 положения этих считывающих головок 275, 275' следует понимать лишь символично. При практическом выполнении они расположены внутри телескопического рычага 234 и снаружи не видны.
Степень свободы вращения несущей рамы 212 вокруг оси 260 вращения контролируется датчиком 276 углового положения, которых закреплен на удерживающей раме 212. В принципе, с этим датчиком 276 углового положения может быть связан второй, идентично устроенный датчик углового положения. В данном случае вместо второго такого датчика углового положения предусмотрены два стационарных фоторелейных барьера 277, 278, которые расположены так, что луч от обоих датчиков не прерывается в одной определенном положении автомобильного кузова 204.
Для работы системы предотвращения столкновений сами по себе нужны лишь считывающие головки 274, 275 и датчик 276 углового положения. Дополнительные считывающие головки 274', 275' и фоторелейные барьеры 277, 278 являются дублированием и служат повышению безопасности.
Описанная система предотвращения столкновений работает в фоне во время обычного выполнения программы в управляющих устройствах 232 или же при ручном управлении в фоне отдаваемых обслуживающим лицом управляющих команд следующим образом.
В управляющие устройства 232 различных несущих тележек 208 от связанных с ними считывающих головок 274 поступает информация о соответствующем мгновенном положении несущих тележек 208 на приводной направляющей 216, а также от считывающих головок 275 - о длине соответствующего телескопического рычага 234 и, тем самым, о высоте соответствующей оси 260 вращения. Датчик 276 углового положения, в свою очередь, передает информацию об угловом положении, которое занимает удерживающая рама 212 с автомобильным кузовом 204 относительно оси 260 вращения. На основе этой информации, а также сохраненной в памяти управляющих устройств 232 информации о граничной линии 271 зоны 272 защиты от столкновений и идеализированного контура 273 закрепленного на удерживающей раме 212 автомобильного кузова, управляющие устройства 232 рассчитывают, находится ли идеализированный контур 273 за пределами зоны 272 защиты от столкновений, как это изображено на фигуре 3, или же вторгается в зону 272 защиты от столкновений, как это показано на фигуре 4. В последнем случае управляющее устройство 232 подает сигнал тревоги и немедленно останавливает управляемое нормальной программой движение автомобильного кузова. Таким способом предотвращается грозящее столкновение между автомобильным кузовом 204 и символизированной граничной линией 270 твердой структурой.
Описанная передача информации от различных измеряющих абсолютные значения датчиков 274, 275 и 276 измерения положения, а также связанные с этим вычисления могут производиться через определенные краткие интервалы времени по существу в режиме реального времени.
Для того чтобы система предотвращения столкновений при выходе из строя одного датчика 274, 275 или 276 измерения положения не потеряла работоспособность, предусмотрены дублирующие считывающие головки 274', 275' и фоторелейные барьеры 277, 278. Выдаваемая парами считывающих головок 274, 274', 275, 275' информация может запрашиваться одновременно и сравниваться, если они отличаются друг от друга более чем на предварительно заданное окно допуска, то также подается сигнал тревоги, и дальнейшее движение автомобильного кузова 204 останавливается. Функционирование датчика 276 углового положения проверяется за счет того, что проходимость фоторелейных барьеров 277, 278 проверяется в тот момент, в который измеряющие абсолютное значение датчики 274, 275 и 276 сигнализируют о таком положении автомобильного кузова 204, в котором должна существовать проходимость фоторелейных барьеров 277, 278. Если луч данного фоторелейного барьера 277, 278 к этому моменту времени прерван, то это значит, что один из измеряющих абсолютное значение датчиков 274, 275 или 276 измерения положения не в порядке. В этом случае также подается сигнал тревоги, и дальнейшее движение автомобильного кузова 204 немедленно прерывается.
Описанная выше система предотвращения столкновений предпочтительно используется не только в конкретной описанной транспортной системе 206, но и везде, где необходимо вводить в погружную ванну и выводить из погружной ванны предметы, прежде всего автомобильные кузова, при наложении друг на друга по меньшей мере одного линейного движения, и по меньшей мере одного вращательного или качательного движения.
Установка (200) для обработки окунанием предметов (204), прежде всего автомобильных кузовов, работает с транспортной системой (206). Для каждой степени свободы движения закрепленного на удерживающей раме (212) предмета (204) предусмотрен датчик (274, 275, 276) измерения положения. В запоминающем устройстве сохранена траектория первой граничной поверхности или граничной линии (270), которая отображает траекторию твердой структуры вдоль траектории движения предмета. Помимо этого, сохранена траектория второй граничной поверхности или граничной линии (271), которая проходит на расстоянии от первой граничной поверхности или граничной линии. Наконец, сохранена траектория контура (273), который представляет траекторию закрепленного на удерживающей раме предмета. Управляющее устройство (232) на основании поступающих в него от датчиков измерения положения сигналов и других сохраненных данных вычисляет, пересекает ли представляющий закрепленный на удерживающей раме предмет контур вторую граничную поверхность или граничную линию или нет, и в первом случае немедленно останавливает дальнейшее движение предмета. Обеспечивается предотвращение столкновения предметов с твердой, примыкающей к траектории движения структурой. 7 з.п. ф-лы, 4 ил.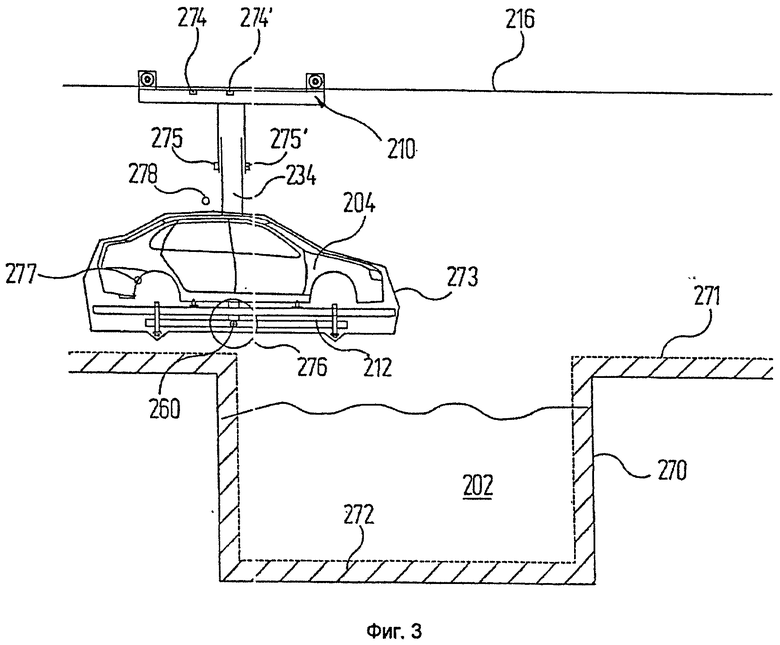
1. Установка для обработки окунанием, прежде всего окрашивания окунанием, предметов, прежде всего автомобильных кузовов, с
а) по меньшей мере одной погружной ванной, которая выполнена с возможностью заполнения технологической жидкостью до определенного уровня,
б) транспортной системой, с помощью которой подлежащие обработке предметы имеют возможность перемещения к погружной ванне, в нее, из нее и от нее, и имеет направляющее устройство, а также по меньшей мере одну выполненную с возможностью перемещения вдоль направляющего устройства транспортную тележку, которая, в свою очередь, включает в себя:
ба) приводной двигатель для траверсного перемещения вдоль направляющего устройства,
бб) удерживающую раму, которая выполнена с возможностью закрепления на ней по меньшей мере одного предмета,
бв) имеющее по меньшей мере одну ось вращения или поворота окунающее устройство, на котором закреплена удерживающая рама,
в) управляющее устройство, в котором записана заданная траектория окунания закрепленного на удерживающей раме предмета и которое управляет движением закрепленного на удерживающей раме предмета,
отличающаяся тем, что
г) предусмотрена система предотвращения столкновений, которая включает в себя:
га) для каждой возможной степени свободы движения закрепленного на удерживающей раме (212) предмета (204) измеряющий абсолютное значение датчик (274, 275, 276) измерения положения,
гб) запоминающее устройство, в котором сохранена траектория первой граничной поверхности или граничной линии (270), которая отображает траекторию твердой структуры вдоль траектории движения предмета (204),
гв) запоминающее устройство, в котором сохранена траектория второй граничной поверхности или граничной линии (271), которая проходит на расстоянии от первой граничной поверхности или граничной линии (270), при этом между первой граничной поверхностью или граничной линией (270) и второй граничной поверхностью или граничной линией (271) образована зона (272) защиты от столкновений,
гг) запоминающее устройство, в котором сохранена траектория контура (273), который представляет траекторию контура закрепленного на удерживающей раме (212) предмета (204),
причем
д) управляющее устройство (232) на основании поступающих в него от датчиков (274, 275, 276) измерения положения сигналов и сохраненных данных о траектории второй граничной поверхности или граничной линии (271), а также о представляющем закрепленный на удерживающей раме (212) предмет (204) контуре (273), постоянно или через определенные промежутки времени вычисляет, вошел ли контур (273) в зону (272) защиты от столкновений или нет, и в первом случае останавливает дальнейшее движение предмета (204).
2. Установка по п.1, отличающаяся тем, что управляющее устройство (232) перемещается на транспортной тележке (208).
3. Установка по п.1, отличающаяся тем, что предусмотрено устройство (274', 275', 277, 278) верификации, которое верифицирует корректное функционирование датчиков (274, 275, 276) измерения положения.
4. Установка по п.3, отличающаяся тем, что устройство (274', 275', 277, 278) верификации по меньшей мере для одной части датчиков (274, 275) измерения положения имеет дублирующий аналогичный датчик (274', 275') измерения положения.
5. Установка по п.3 или 4, отличающаяся тем, что устройство (274', 275', 277, 278) верификации по меньшей мере для части датчиков (276) измерения положения имеет стационарное устройство (277, 278), мимо которого закрепленный на удерживающей раме (212) предмет (204) проводится по меньшей мере один раз, где его положение определяется независимо.
6. Установка по п.5, отличающаяся тем, что стационарное устройство включает в себя по меньшей мере один фоторелейный барьер (277, 278).
7. Установка по п.1, отличающаяся тем, что ширина зоны (272) защиты от столкновений является функцией скорости предмета (204).
8. Установка по п.1, отличающаяся тем, что предусмотрено автоматически работающее устройство определения типа кузова.
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО АВТОМОБИЛЬНЫХ КУЗОВОВ, ПРЕЖДЕ ВСЕГО ДЛЯ НАНЕСЕНИЯ ЛАКОКРАСОЧНОГО ПОКРЫТИЯ НА ИЗДЕЛИЯ, ПРЕИМУЩЕСТВЕННО НА АВТОМОБИЛЬНЫЕ КУЗОВА | 2001 |
|
RU2267363C2 |
| СПОСОБ ПОДАЧИ И УДАЛЕНИЯ ДЕТАЛЕЙ, В ЧАСТНОСТИ АВТОМОБИЛЬНЫХ КУЗОВОВ, А ТАКЖЕ УСТРОЙСТВО И УСТАНОВКА ДЛЯ ПОВЕРХНОСТНОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 1997 |
|
RU2192316C2 |
| DE 8535671 U1, 18.05.1989 | |||

