Изобретение относится к грузоподъемной технике и может быть использовано для перемещения больших грузов, преимущественно на небольшую величину с последующей фиксацией в поднятом положении. Например, изобретение может быть использовано для фиксации в рабочем режиме транспортного положения прицепных колесных противовесов с ходовой платформой мощных автомобильных и железнодорожных кранов для достижения значительного повышения грузоподъемности при существенном уменьшении заднего габарита этих изделий. В общем случае, предлагаемое техническое решение позволяет в 10 и более раз увеличить грузоподъемность устройств, которые реализованы на базе полиспастного механизма.
Известен силовой многократный полиспаст. В нем груз подвешивается к подвижной обойме, а тяговое усилие прикладывается к ветви каната, сбегающей с последнего из последовательно огибаемых тросом блоков. Сила натяжения каната определяется как частное от деления массы груза на кратность полиспаста, которое определяется количеством подвижных блоков (Большая Советская Энциклопедия, М., 1975 г. полиспаст, стр.214).
Недостатком такой конструкции является усложнение, удорожание, увеличение габаритов изделия, снижение общего к.п.д.
Общеизвестен одинарный полиспаст, являющийся частным случаем многократного, который содержит неподвижный блок, то есть колесо с желобом, канат и который дополнительно оснащен приводом для подъема тел.
Эта конструкция, это грузоподъемное устройство обладает максимальной простотой и минимальными габаритами. Но оно не имеет выигрыша в силе, что является его существенным недостатком. Действие силы привода приводит к подъему, равному ей по силе тяжести груза. Принимаем данное решение за прототип.
Целью изобретения является устранение указанного недостатка и создание дополнительного выигрыша в силе при использовании грузоподъемного устройства, содержащего полиспаст с блоками, канатом и приводом.
Это достигается тем, что действие силы привода приложено к участку каната под углом не равным 0° к продольной оси этого же участка каната,
что конец каната, огибающего неподвижный блок, закреплен на неподвижной опоре, а действие силы привода приложено к участку каната, расположенному между неподвижным блоком и точкой закрепления конца этого каната на опоре и направлено под углом, не равным 0°, к продольной оси этого же участка каната;
что при одном неподвижном блоке и закреплении конца каната, огибающего этот блок, на неподвижной опоре, действие силы привода направлено под углом, равным 90° к касательной линии, соединяющей точку закрепления конца троса на опоре и окружность желоба неподвижного блока, и приложено к участку каната, расположенному между точкой закрепления конца каната на неподвижной опоре и неподвижным блоком;
что при двух неподвижных блоках и закреплении конца каната, огибающего эти блоки, на неподвижной опоре, действие силы привода направлено под углом, равным 90° к касательной линии, соединяющей окружности желобов неподвижных блоков, и приложено к участку каната, расположенному между блоками;
что при двух неподвижных блоках действие силы привода направлено под углом, равным 90° к касательной линии, соединяющей окружности желобов этих блоков, и приложено к участку каната, расположенному между блоками, а оба конца каната закреплены на поднимаемом грузе.
В общем случае, действие силы привода может быть направлено под углом, не равным 0°, к продольной оси участка каната в любой точке гибкого рабочего органа, расположенной между ближайшим к поднимаемому грузу неподвижным блоком и точкой закрепления конца каната на неподвижной опоре или на грузе.
Изобретение позволяет получить значительный выигрыш в силе не только для грузоподъемных устройств, содержащих однократный полиспаст, но и дополнительный выигрыш при использовании многократных полиспастов любой сложности.
Условно примем, что свободный конец каната принадлежит той его ветви, которая огибает неподвижный блок и не закреплена на грузе. Второй конец каната, который условимся называть грузовым, предназначен для надежного соединения с поднимаемым телом.
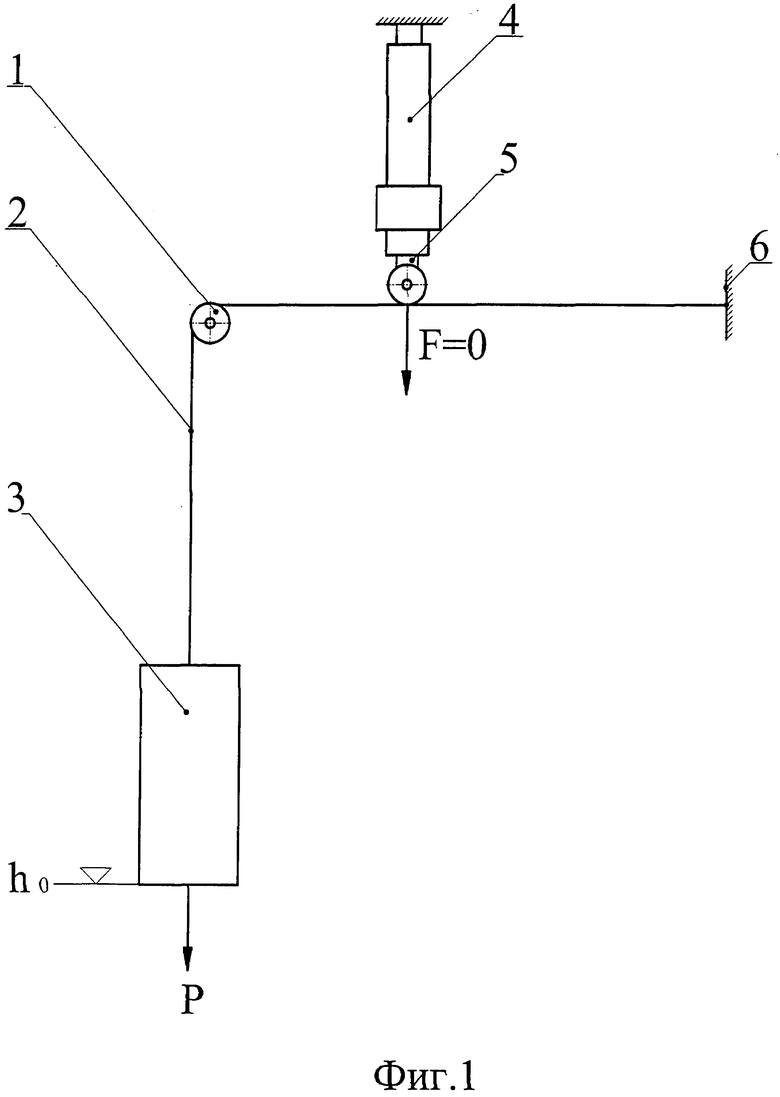
На Фиг.1, Фиг.2 изображен один из вариантов предлагаемого грузоподъемного устройства, содержащего один неподвижный блок поз.1, гибкий орган в виде каната поз.2, один конец которого закреплен на поднимаемом грузе поз.3. Функцию привода выполняет, например, гидроцилиндр поз.4, имеющий выдвигаемый шток поз.5. Поз. 5 имеет на конце ролик с желобом, то есть блок, по которому перемещается канат. Гибкий рабочий орган поз.2 грузовым концом соединен с поднимаемым телом, а противоположным ему - свободным, закреплен в неподвижной опоре 6.
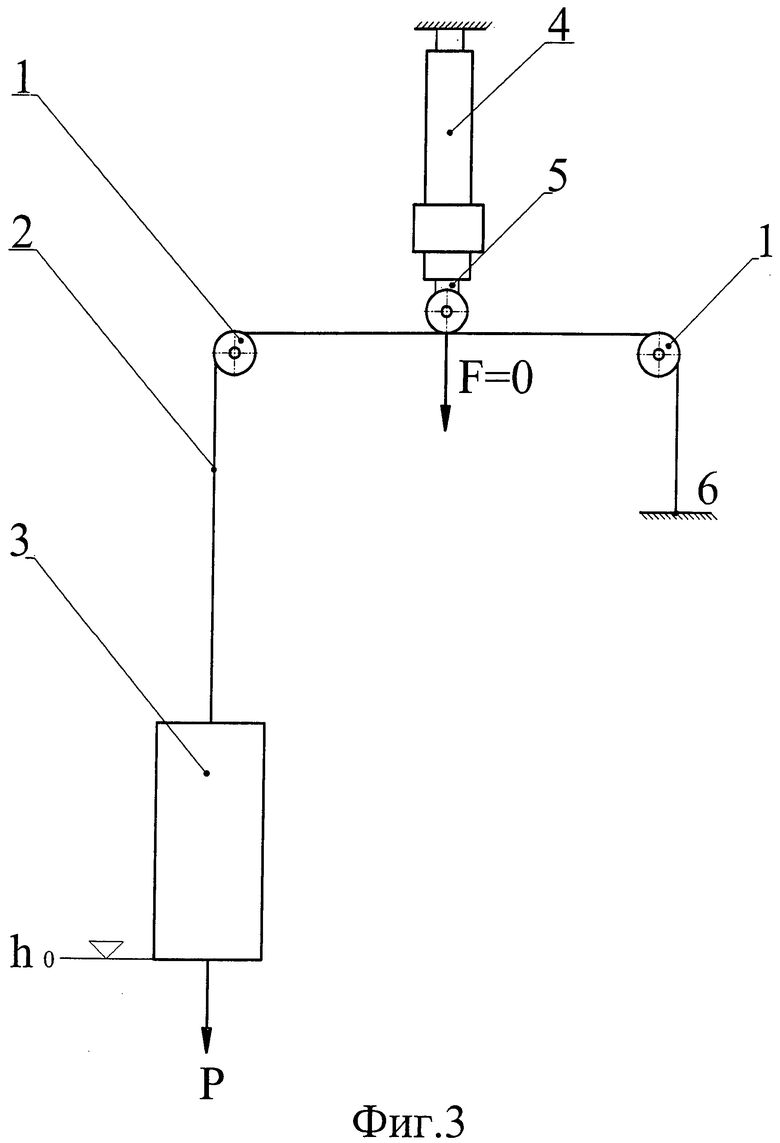
На Фиг.3, Фиг.4 изображен еще один вариант конструктивного выполнения грузоподъемного устройства с двумя неподвижными блоками поз.1 и закреплением свободного конца каната на неподвижной опоре 6.
В общем случае действие силы привода может быть направлено под углом, не равным 0°, к продольной оси каната в любой его точке, расположенной между ближайшим к поднимаемому грузу неподвижным блоком и точкой закрепления конца каната на опоре.
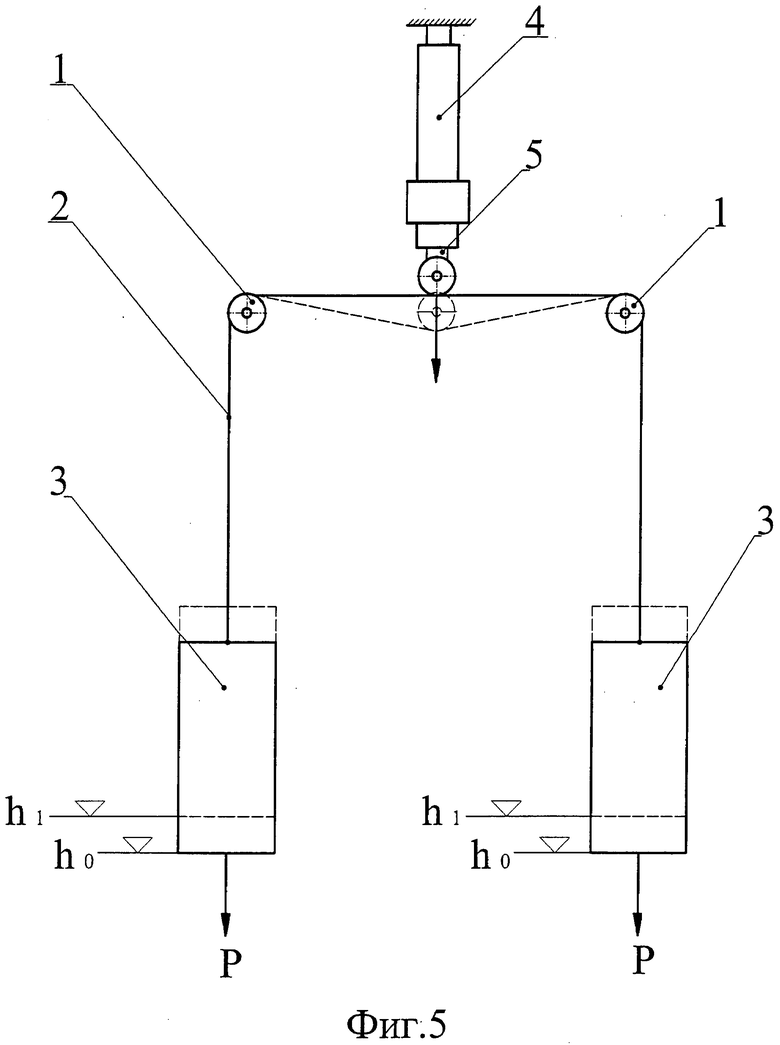
На Фиг.5 показан вариант с двумя неподвижными блоками 1 и огибающим их канатом 2, концы которого подсоединены к двум поднимаемым телам 3 и закреплены на них.
Данное решение позволяет поднимать грузы как одинаковой массы, так и различающиеся по величине. При действии толкающего усилия гидроцилиндра поз.4 посередине участка каната, расположенного между неподвижными блоками, сила подъема, развиваемая каждой ветвью гибкого рабочего органа, расположенной, соответственно с левой и с правой стороны относительно ролика штока поз.5 привода поз.4, будет одинакова. При смещении с середины усилия натяжения ветвей каната будут меняться по известным математическим законам и будут отличаться друг от друга. Регулированием положения поз.5 относительно блоков поз.1 можно добиться одновременного подъема грузов не только одинаковых, но и отличающихся друг от друга по массе.
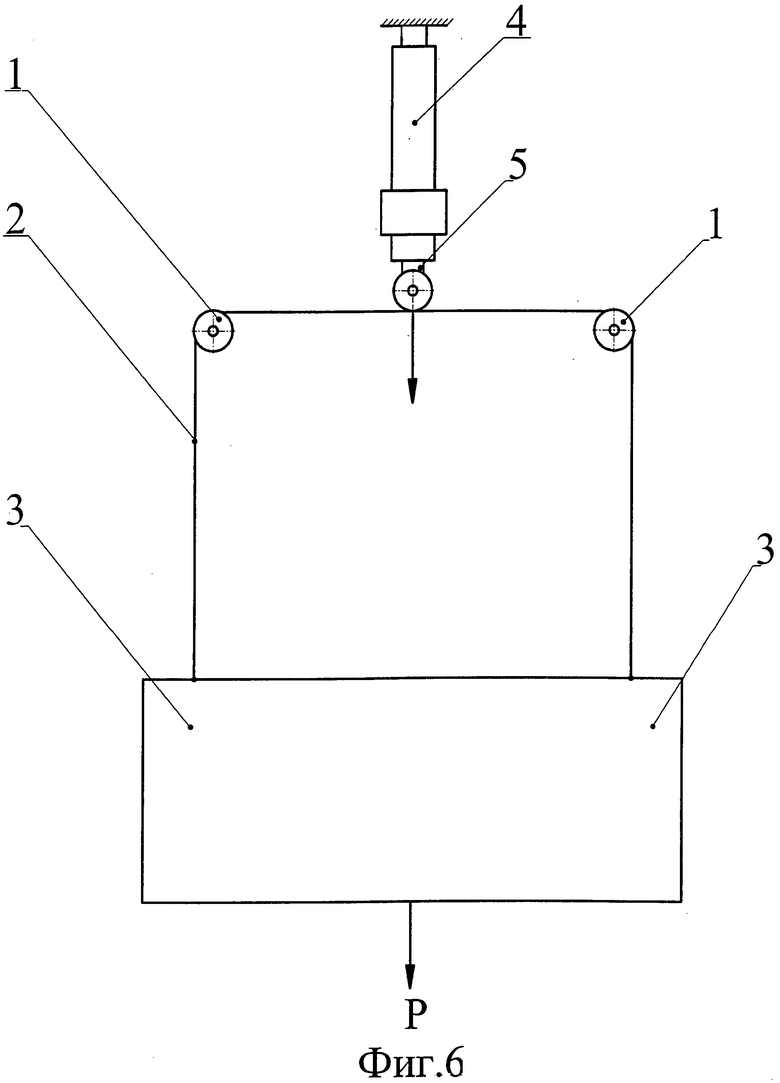
На Фиг.6 изображен вариант конструктивного выполнения грузоподъемного устройства с двумя неподвижными блоками поз.1 и закреплением обоих концов каната на одном грузе. При срабатывании привода и выдвижении поз.5 происходит изменение положения каната, расположенного между блоками, с прямолинейного в кривую в виде тупого угла, расположенного своей вершиной со стороны поз.4. От перемещения штока вниз происходит подъем груза вверх. Это решение целесообразно применять для тел, имеющих большой габарит. Это решение оптимально для небольшого подъема с фиксации в приподнятом положении тяжелых грузов, имеющих большой габарит, и может быть применено на мощных автомобильных и железнодорожных кранах, оснащенных прицепными колесными противовесами массой 30-100 т.
Работает предлагаемое грузоподъемное устройство следующим образом.
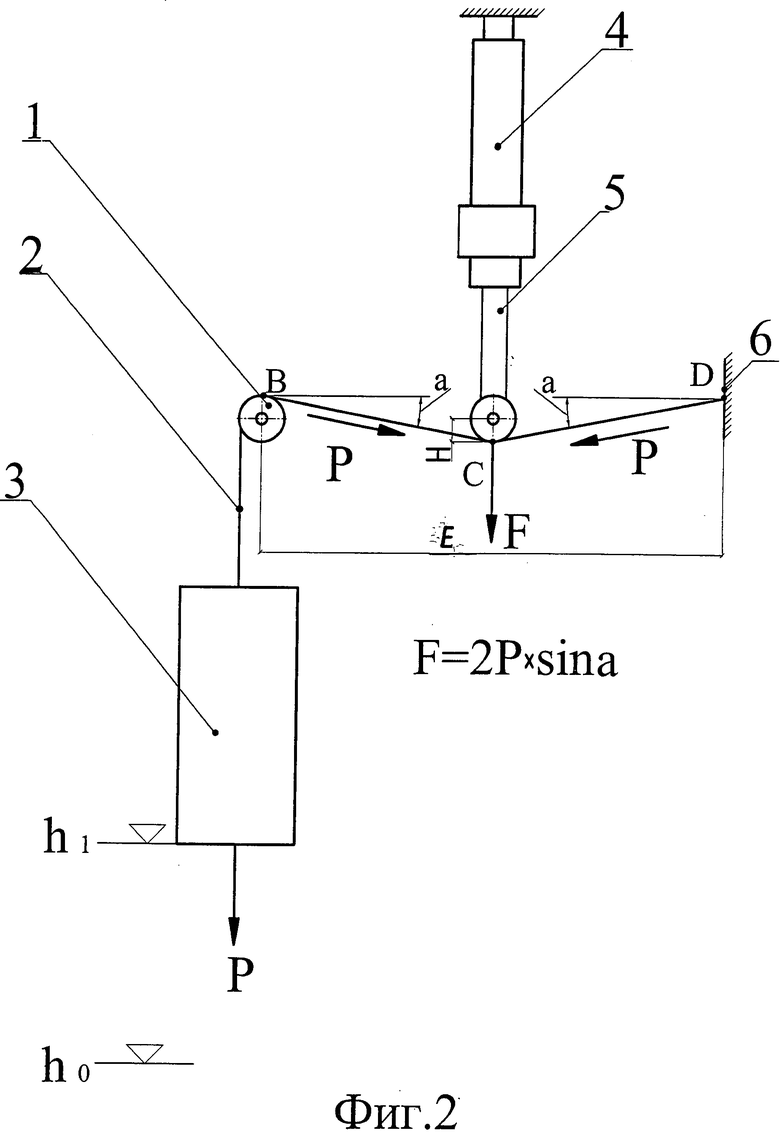
При подаче давления в поршневую полость гидроцилиндра происходит выдвижение его штока поз.5 и подъем груза. Этот режим показан на Фиг.2 и Фиг.4. Участок каната, расположенный между стационарно установленными блоками 1 или между блоком и неподвижно закрепленной опорой 6, изгибается, отклоняется вниз от первоначального положения и его трасса из прямой линии преобразуется в кривую. Угол отклонения части каната, расположенный между блоком и роликом штока 5, обозначим α.
Изменение положения гибкого рабочего органа, смещение его вниз с помощью привода приводит к подъему груза. Это происходит потому, что длина каната, расположенного между блоком и роликом штока привода, изменилась, увеличилась, так как любая кривая больше прямой, соединяющей ее концы.
Величина усилия гидроцилиндра, приводящая к изгибу каната, определяется в соответствии с параллелограммом сил. То есть сила F является равнодействующей усилий в участках каната между точками B-С и С-D. В математическом виде это для симметричного расположения привода между блоками (или между блоком и опорой) может быть представлено формулой: F=2P×sinα Приближенно для малых α выигрыш в силе равен частному от деления длины между точками B и C к величине отклонения каната роликом штока гидроцилиндра Н. При небольших углах отклонения каната (X значение силы F может значительно, в десять и более раз быть меньше веса поднимаемого груза. То есть новое техническое решение позволяет реализовать конструктивно максимально простое и малогабаритное грузоподъемное устройство и получить значительный выигрыш в силе при минимальных усилиях подъема, развиваемых исполнительным органом привода.
Применение предлагаемого изобретения позволяет эффективно его использовать для создания грузоподъемного механизма специального назначения. Его отличительной особенностью являются получение значительного дополнительного выигрыша в силе при подъеме грузов с помощью многократного или однократного полиспаста. При этом упрощается конструкция и существенно уменьшаются габариты устройства. Оптимально использовать предлагаемый грузоподъемный механизм при сравнительно небольших величинах хода исполнительного механизма. Например, при подъеме массивных колесных прицепных противовесов, необходимых для создания мощных мобильных кранов. Их (прицепов) применение позволяет на 50-70% повысить грузоподъемность изделия и, что очень важно в эксплуатации, особенно для железнодорожников, обеспечить минимальный задний габарит. В этом случае, для создания дополнительного удерживающего момента нужно лишь немного приподнять противовес, оторвать его колеса от железнодорожной колеи или дороги и зафиксировать данное положение. Тогда масса прицепного противовеса прибавится к массе установленного на аутригеры крана и позволит значительно увеличить устойчивость всего изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЕМА ГРУЗОВ МОБИЛЬНЫМ КРАНОМ | 2012 |
|
RU2494955C1 |
| СПОСОБ ПОДЪЕМА ГРУЗОВ МОБИЛЬНЫМ КРАНОМ | 2012 |
|
RU2518834C2 |
| МОБИЛЬНЫЙ КРАН | 2010 |
|
RU2460684C2 |
| КРАН УКЛАДОЧНЫЙ | 2011 |
|
RU2450095C1 |
| Способ подъема груза | 2019 |
|
RU2703097C1 |
| Механизм подъема | 1987 |
|
SU1773858A1 |
| ПОГРУЖНАЯ СИСТЕМА ДЛЯ ВЫРАЩИВАНИЯ МОРЕПРОДУКТОВ (ВАРИАНТЫ) | 2005 |
|
RU2303353C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ПАКЕТА РЕЛЬСОВЫХ ЗВЕНЬЕВ | 2010 |
|
RU2452808C2 |
| СПОСОБ ВЫПРАВКИ ПУТИ | 2007 |
|
RU2385978C2 |
| Устройство для монтажа вертикальных конструкций | 1980 |
|
SU906932A1 |
Изобретение относится к грузоподъемной технике и может быть использовано для перемещения больших грузов, преимущественно на небольшую величину с последующей их фиксацией в поднятом положении. Грузоподъемное устройство содержит полиспаст с блоками, канатом и приводом. Действие силы привода приложено к участку каната под углом, не равным 0º, к продольной оси этого же участка каната. Достигается упрощение конструкции и уменьшение габаритов устройства. 4 з.п. ф-лы, 6 ил.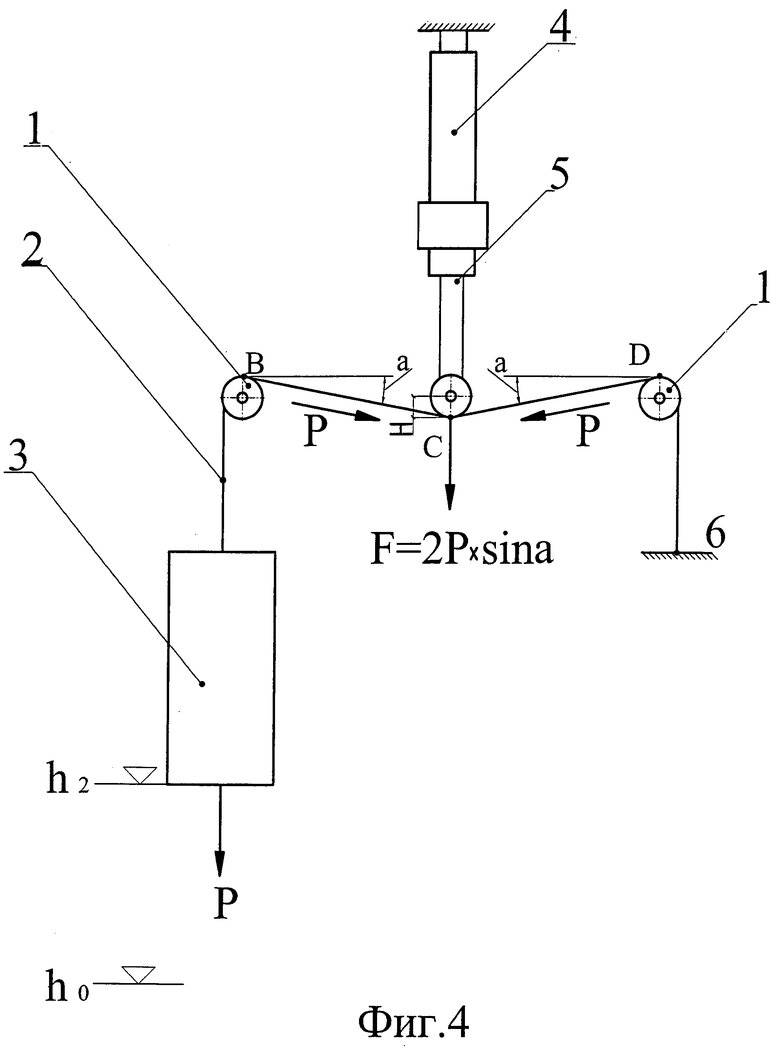
1. Грузоподъемное устройство, содержащее полиспаст с блоками, канатом и приводом, отличающееся тем, что действие силы привода приложено к участку каната под углом, не равным 0°, к продольной оси этого же участка каната.
2. Грузоподъемное устройство по п.1, отличающееся тем, что конец каната, огибающего неподвижный блок, закреплен на неподвижной опоре, а действие силы привода приложено к участку каната, расположенному между неподвижным блоком и точкой закрепления конца этого каната на опоре и направлено под углом, не равным 0°, к продольной оси этого же участка каната.
3. Грузоподъемное устройство по п.1, отличающееся тем, что при одном неподвижном блоке и закреплении конца каната, огибающего этот блок, на неподвижной опоре, действие силы привода направлено под углом, равным 90° к касательной линии, соединяющей точку закрепления конца троса на опоре и окружность желоба неподвижного блока, и приложено к участку каната, расположенному между точкой закрепления конца каната на неподвижной опоре и неподвижным блоком.
4. Грузоподъемное устройство по п.1, отличающееся тем, что при двух неподвижных блоках и закреплении конца каната, огибающего эти блоки, на неподвижной опоре, действие силы привода направлено под углом, равным 90° к касательной линии, соединяющей окружности желобов неподвижных блоков, и приложено к участку каната, расположенному между блоками.
5. Грузоподъемное устройство по п.1, отличающееся тем, что при двух неподвижных блоках действие силы привода направлено под углом, равным 90° к касательной линии, соединяющей окружности желобов этих блоков, и приложено к участку каната, расположенному между блоками, а оба конца каната закреплены на поднимаемом грузе.
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 0 |
|
SU172461A1 |
| Кран | 1983 |
|
SU1092132A1 |
| Ограничитель грузоподъемности стреловых кранов | 1954 |
|
SU102330A1 |
| Способ гашения колебаний груза и устройство для его осуществления | 1989 |
|
SU1801923A1 |
| US 20080203046 A1, 28.08.2008 | |||

