Перекрестная ссылка на родственную заявку
По заявке испрашивается приоритет по предварительной заявке США 60/994,711 от 21 сентября 2007 года (21.09.2007) и по заявке с 11/977,580 от 25 октября 2007 года (25.10.2007), которые озаглавлены «Способ и устройство для коррекции функции синхронизации в узловом блоке сбора сейсмических данных».
Область техники
Настоящее изобретение относится к области сейсмической разведки. Конкретнее, изобретение относится к способу и устройству для управления и коррекции заданиям времени, используемых в распределенной узловой системе сейсмического приема.
Обычно в сейсмической разведке для генерации акустического сигнала, распространяющегося в толще пород и частично отражаемого подповерхностными сейсмическими горизонтами (т.е. границами между подповерхностными литологическими или жидкостными слоями, характеризуемыми различными параметрами эластичности), используют источник сейсмических волн. Отраженные сигналы (известные как "отраженные сейсмические волны") обнаруживают и записывают сейсмическими приемниками, расположенными на или рядом с поверхностью земли, генерируя, таким образом, подповерхностную сейсмическую картину. Записанные сигналы или данные о сейсмических волнах можно затем обрабатывать для извлечения информации, относящейся к литологическим подповерхностным образованиям, распознавая такие характеристики, как, например, границы подповерхностных литологических образований.
Обычно сейсмические приемники располагаются в виде матрицы, где матрица состоит из линии станций, каждая из которых включает в себя цепи приемников, размещенных для записи данных от сейсмического разреза по линии приемников. Для данных для больших областей и для трехмерного представления формации можно размещать бок о бок несколько однолинейных матриц таким образом, образуя сеть приемников. Часто станции и их приемники разнесены друг от друга или находятся в удаленных местоположениях. Например, в наземной сейсморазведке от сотен до тысяч приемников, называемых сейсмографами, могут быть развернуты пространственно-распределенным образом так, что в типичной конфигурации сети каждая линия длиной в 5000 метров, приемники расположены на расстоянии 25 метров и последовательные линии расположены на расстоянии 500 метров. В зависимости как от многих геофизических факторов, так и от операционного простоя по погодным условиям или оборудованию распределенные блоки могут оставаться развернутыми на временные интервалы, превышающие две недели.
Акустические волны, используемые в сейсмической разведке, обычно генерируются центральной системой управления источником сейсмических волн, который запускает волновое событие взрывом динамита, выстрелом из пневматического устройства, вибросейсмическим сигналом и т.п. Система регистрации, т.е. сейсмические приемники и их управляющий механизм синхронизируются с волновым событием таким образом, что первый сэмпл данных периода регистрации соответствует по времени пику волнового события, как, например, запуск опорного сигнала для вибрационных операций. Периоды регистрации обычно длятся от 6 до 16 секунд следом за первым сэмплом, и каждый сейсмический датчик сэмплируется с интервалом от 0,5 до 4 миллисекунд.
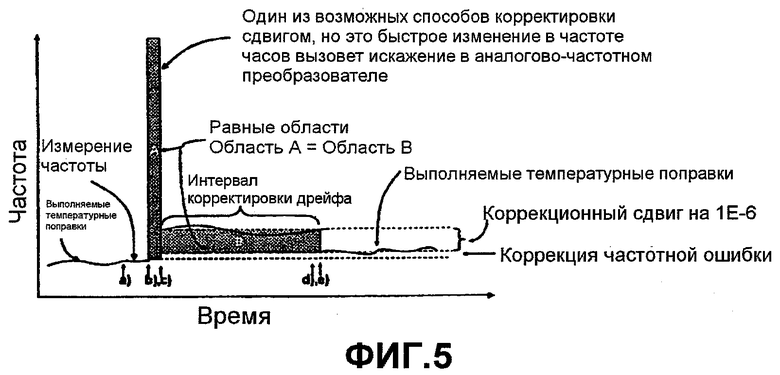
Фундаментальной важностью для любой сейсмической системы обладает способ задания времени, которым выполняется синхронизация волнового события и сэмплирования акустического волнового поля. На фиг.1 представлены основные элементы, задействованные в обычной системе 10 сейсмической регистрации, которая соединена проводом 12 с множеством отдельных датчиков 14 регистрации сейсмических данных, таким образом позволяя всей системе 10 синхронизироваться по времени. В предыдущем уровне техники используют единственное, централизованное задание времени, которое обеспечивает передачу всем отдельным датчикам 14 регистрации сейсмических данных одной временной точки отсчета. Синхронизационный эталон времени поддерживается на центральном базовом блоке 16, таком, как транспортное средство управления операцией. Эта точка отсчета обычно поддерживается в актуальном состоянии постоянно работающим беспроводным приемником 18, таким, как приемник глобальной навигационной системы ("GPS"), который настроен для связи с внешней системой 20 отсчета времени, которой, в случае GPS приемника, выступают спутники GPS. Приемник 18 GPS напрямую корректирует управляемый напряжением тактовый генератор 22 высокой стабильности ("VCO"), который используют для отсчета системные часы 24, с которыми, обычно, синхронизируются все элементы. Контроллер 26 системы регистрации использует цепь фазовой синхронизации (PLL) для синхронизации исходящих командных кадров с системными часами 24. Исходящие командные кадры, в свою очередь, используются для цепей фазовой синхронизации во множестве датчиков 14 регистрации сейсмических данных, соединенных кабелями с контроллером 26 системы регистрации. Командные кадры включают в себя дискретный сигнал часов, используемый для синхронизации аналогово-цифровых преобразователей 28 в датчиках 14 с сигналом GPS и обычно представляющий собой сигнал 1 импульса в секунду или любой другой интервал времени, являющегося целым числом дискретных интервалов с момента появления этого отсчета времени. В любом случае контроллер 30 источника сейсмических волн синхронизируется с системными часами 24 посредством дискретных аппаратных интерфейсов, которые либо напрямую подсоединены к центральным GPS-корректированным часам 24 или используют PLL, настроенную на центральный эталон времени, предоставленный системными часами 24. Важно отметить, что в большинстве систем управления источником предыдущего уровня техники для выполнения функций синхронизации не используют GPS-корректированное задание времени, а вместо этого используют метки времени GPS для временной маркировки определенных значимых событий, записываемых системой, таких как прием события FIRE или события TIMEBREAK (которое представляет время пиковой интенсивности источника сейсмической волны) или запуск вибросейсмического сигнала. Контроллер системы регистрации предыдущего уровня техники сдвигает момент, когда происходит событие FIRE таким образом, чтобы обеспечить наступление события TIMEBREAK синхронно с аналогово-цифровым преобразованием распределенных сейсмических датчиков, что необходимо для получения точных сэмплов волнового поля.
В отличие от проводной, централизованной системы задания времени с фиг.1 более современные системы сейсмической регистрации предыдущего уровня техники делают попытку избежать или минимизировать использование кабелей между центральным базовым блоком и отдельными датчиками регистрации сейсмических данных. В таких случаях сейсмические датчики интегрируются с другим аппаратным обеспечением в отдельных блоках или узлах регистрации сейсмических данных таким образом, что некоторые из управляющих и операционных функций, таких как функции синхронизации, ранее выполняемых базовым блоком, теперь выполняют на отдельных блоках регистрации сейсмических данных. В некоторых из этих "узловых" систем предыдущего уровня техники каждый блок регистрации сейсмических данных поддерживает беспроводную связь с центральной базой, в то время как в других, "автономных" узловых системах предыдущего уровня техники каждый блок регистрации сейсмических данных работает независимо от центральной базы.
Базовые элементы, используемые в обычной "узловой" системе сейсмической регистрации, которая использует автономные блоки регистрации сейсмических данных, аналогичны блок-схеме, показанной на фиг.1, за исключением того, что соединение физического уровня (проводные или беспроводные) между центральным блоком и полем распространения сейсмических блоков устраняется таким образом, что отдельные блоки сейсмической регистрации работают, по крайней мере, полунезависимо от центрального блока. В случае устранения проводного соединения физического уровня, устраняются многие из недостатков, таких как вес, стоимость и высокий уровень сбоев, возникающих из-за кабелей. Соответственно, в случае устранения беспроводного соединения физического уровня устраняются многие из недостатков, таких как ограничения полосы пропускания, подверженности интерференции, необходимость в лицензиях на радиочастоты, возникающих из-за беспроводного соединения.
Такие автономные блоки сейсмической регистрации характерны одним или более сейсмическими датчиками, размещаемыми в пространственно распределенной матрице вокруг узла. Каждый отдельный датчик связан с узлом кабелем. Обычно несколько датчиков соединяются для создания матрицы одним кабелем.
Одним существенным улучшением в автономной сейсмической регистрации стала разработка полностью интегрированных, замкнутых автономных блоков сейсмической регистрации, таких, как описаны в заявках на патент США 10/448,547 и 10/766,253. В этих заявках описываются замкнутый, автономный блок сейсмической регистрации непрерывной записи. Замкнутый блок включает в себя полностью закрытый корпус, обладающий стенкой, задающей как минимум одну внутреннюю камеру в корпусе; как минимум один сейсмограф, закрепленный внутри указанной внутренней камеры; часы, размещенные внутри указанной внутренней камеры; источник питания, размещенный внутри указанной внутренней камеры; и устройство записи сейсмических данных, размещенное внутри указанной внутренней камеры, где каждый из указанных электрических элементов включает в себя электрическое соединение, и все электрические соединения между любыми электрическими элементами находятся внутри указанного корпуса. Таким образом, в отличие от предыдущего уровня техники сейсмические датчики или сейсмографы также находятся внутри самого корпуса, превращая всю систему в замкнутую и устраняя внешние провода или кабели любых типов. Корпусу придается форма, улучшающая размещение и сцепление с землей, максимизируя площадь поверхности корпуса, находящуюся в контакте с землей. Предпочтительно, корпус состоит из первой пластины, обладающей первым контуром, и второй пластиной, обладающей вторым контуром, где пластины соединяются по их контурам стенкой, задающей внутреннюю камеру. Таким образом, корпус может быть дискообразным или в форме цилиндра. Такой блок желателен не только из-за формы корпуса, но также и потому, что внешние соединения, такие как между блоком электроники и сейсмическим датчиком/сейсмографом, по причине полной замкнутости устраняются.
В любом случае, когда устранены соединения физического уровня с центральным блоком, автономные сейсмические блоки нужно реализовывать с распределенным заданием времени, что означает размещение управляющей часовой системы на каждом отдельном сейсмическом блоке. Более того, без кабельных соединений для синхронизации телеметрии данных автономные узловые сейсмические системы должны зависеть от батарейных источников питания для электроники отдельных сейсмических блоков. Такие беспроводные блоки сейсмической регистрации работают независимо от системы управления источником сейсмических волн и синхронизирующих часов, с ней связанной. Вместо этого они используют принцип постоянного приема синхронизирующего сигнала и, в случае вышеупомянутой ссылки на патент, также и постоянного приема данных. Зная, что событие источника синхронизировано с семплом интервала сейсмических данных, данные можно связать с корректным событием источника, в процессе, выполняемом не в реальном времени и следующем за извлечением узла.
После устранения соединения физического уровня для распределенных беспроводных блоков сейсмической регистрации способ, которым получают дискретные часы каждого сейсмического блока и синхронизацию этих дискретных часов с событиями источника сейсмических волн, должен учитывать утрату синхронизации командных кадров из системы предыдущего уровня техники с фиг.1.
В предыдущем уровне техники автономные блоки сейсмической регистрации обычно синхронизируют и корректируют свои локальные системы задания времени, используя тот же способ и устройство, реализованные в системах с архитектурой централизованного задания времени. Конкретно, синхронизация выполняется путем реализации беспроводного доступа к общему эталону времени непрерывного доступа, такому как система спутников GPS. В этом случае задания времени с помощью спутника GPS используют в качестве системных часов, при помощи приемника GPS, установленного на плате каждого отдельного блока сейсмической регистрации, вместо установки приемника GPS на плате центрального блока. Однако по ряду причин такая система задания времени для автономных блоков нежелательна.
Во-первых, системы с постоянно работающими функциями, такими как часы, используют существенное количество электроэнергии. В то время как центральный блок может обладать доступом к постоянному источнику тока, автономные блоки сейсмической регистрации не могут иметь такого доступа и зависят от источника тока ограниченной емкости, в частности аккумулятора. Конкретнее, использование постоянно работающего беспроводного приемника для коррекции VCO крайне неэффективно с точки зрения потребления электроэнергии. Например, постоянно работающий GPS приемник может потреблять от 20 до 50 процентов всей емкости аккумулятора сейсмического блока. Для решения этой проблемы системы регистрации предыдущего уровня техники обычно используют "отдельно стоящий" узел, описанный выше, где множество сейсмических датчиков размещают в пространстве вокруг узла и каждый датчик соединен с узлом кабелем. Хотя такие системы распределяют нагрузку, создаваемую постоянно корректируемыми часами между несколькими сейсмическими сенсорами, такая система опять использует ненадежные кабели для соединения распределенных в пространстве сейсмических датчиков. Однако по мере приближения числа подключенных к блоку регистрации данных сейсмических датчиков к единице, часть общего бюджета электроэнергии, используемая для поддержки беспроводной синхронизации, становится значительно более существенной, и питание становится фактором, эффективно ограничивающим длительность размещения блока сейсмической регистрации.
Во-вторых, осуществление беспроводного доступа к внешней точке 20 отсчета времени, для узловых блоков сейсмической регистрации оказывается значительно труднее, чем для приемника в центральном базовом блоке, таком как сейсмическая станция на грузовике. Беспроводной приемник и антенна узлового блока сейсмической регистрации расположены в самом блоке (или в предельной близости от него), и обычно такие блоки размещают близко к земле (или, в отдельных случаях, даже под поверхностью земли). Более того, физическое размещение блока определяется геометрией ареала размещения, и, таким образом, физическое размещение нельзя изменить с целью обеспечения более качественного беспроводного доступа. Далее, плотный лиственный покров, пересеченная местность и городские постройки могут дополнительно осложнять возможность узлового беспроводного приемника поддерживать постоянную временную коррекцию. В результате на протяжении съемки сигнал постоянного внешнего отсчета со спутника GPS или другого источника будет, скорее всего, разрываться и прерываться. Напротив, базовый блок, такой как сейсмическая станция на грузовике, обычно можно разместить в таком месте, где беспроводной доступ к отсчету времени беспрепятственен и перестает быть важным фактором.
С ограниченным беспроводным доступом к внешней точке 20 отсчета времени узловые системы задания времени должны рассчитывать на стабильность или "перехватывающие" возможности VCO в управляющей цепи для поддержки стабильного частотного вывода во время периодов, когда управляющая цепь не обладает постоянным отсчетом для коррекции VCO. Одно из решений предыдущего уровня техники использует термостатированный кварцевый или атомный тактовый генератор, работающие как "перехватывающие" системы задания времени. Однако стоимость и энергопотребление таких тактовых генераторов делают их использование нецелесообразным. Более типичным решением является использование в качестве "перехватывающего" тактового генератора кварцевого тактового генератора высокой стабильности с температурной компенсацией. VCO такого класса могут поддерживать фиксированную частоту с точностью +5E-7 в промышленном диапазоне рабочих режимов узла.
Третий недостаток реализации автономного блока сейсмической регистрации, использующей постоянно работающий приемник GPS, возникает из способа, в котором беспроводной приемник, следом за долгими периодами плохого беспроводного приема, корректирует частоту VCO. Текущие способы предыдущего уровня техники вызывают искажения в процессе АЦП дельта-сигма преобразователей, используемых в таких блоках регистрации. Управляющие цепи, реализованные в таких GPS-корректируемых системах задания времени предыдущего уровня техники сконструированы для приведения 1 PPS вывода корректируемых часов к совпадению с 1 PPS сигналом GPS. Этого достигают, изменяя частоту VCO для компенсации разницы во времени между двумя точками отсчета 1 PPS. Частотные дельты, используемые в такой коррекции частоты, выбираются из расчета минимизации времени, в течение которого выполняется коррекция, таким образом, что корректируемые часы быстро приводятся в синхрон с отсчетом времени GPS. Несмотря на то, что эти GPS-корректируемые системы задания времени предоставляют ограниченный контроль над частотными дельтами управляющих цепей, таким образом позволяя некоторое уменьшение искажений, вызываемых изменением рабочей частоты VCO, такое уменьшение частотной дельты значительно увеличивает временной интервал, в течение которого выполняется коррекция и в течение которого приемник GPS должен находиться в режиме высокого энергопотребления.
Краткое описание существа изобретения
Существует потребность в способе, посредством которого автономные узловые блоки сейсмической регистрации, распределенные по большим пространственным областям, могли бы синхронизироваться друг с другом и с контроллером сейсмических волн, минимизируя при этом энергопотребление блоков. Такой способ должен разрешить проблему отсутствия проводного или беспроводного соединения физического уровня между узлами или контрольным блоком, и должен сделать это таким образом, чтобы энергопотребление осталось низким. Устройство, используемое для реализации интерфейса системы задания времени к внешнему отсчету времени, такому как GPS, решает проблему прерывистого и ненадежного характера задания времени, возникающего из-за операционных и параметров окружающей среды, в которых приходится функционировать блоку. Таким образом, было бы желательно обладать такой конструкцией управляющей цепи, реализующей системы задания времени, которая бы стабилизировала рабочие характеристики тактового генератора при невозможности осуществления доступа к внешнему отсчету времени. Алгоритмы управляющей цепи должны адаптироваться к рабочим характеристикам тактового генератора и, для того чтобы избежать необходимости осуществлять доступ к внешнему отсчету времени в те периоды, когда вероятность успешного соединения с внешним отсчетом времени низка, использовать предикативные методы.
Согласно настоящему изобретению предложено устройство для осуществления доступа к общему эталону времени из пространственно распределенной узловой системы сейсмической регистрации и способ, с помощью которого можно установить синхронизированное задание времени с низким энергопотреблением между распределенными узлами, при ограниченном доступе к общему эталону времени. Изобретение описывает управляющий процесс этого устройства, которое достигает целей задания времени с низким энергопотреблением, укладываясь в ограниченные, геофизически приемлемые, допуски ошибок синхронизации.
Согласно изобретению предложены устройство и способ, позволяющие использование внешнего точного задания времени в беспроводных узловых блоках сейсмической регистрации при экономии батарейного питания блока. Точнее, изобретение предоставляет собой прерывистый доступ, при помощи прерываемой работы бортового беспроводного приемника, к внешнему точному заданию времени для непериодической подстройки переменных открытого цикла и коррекции синхронизационных ошибок, возникающих из-за ограниченной стабильности подхода открытого цикла. Дополнительно изобретение предоставляет собой способ коррекции накапливающейся ошибки между локальными часами и внешнего точного задания времени.
Части сейсмического блока, которые относятся к заданию времени, обычно включают в себя беспроводной приемник, который взаимодействует с контроллером узла, который регулирует регулируемое устройство тактового сигнала, выполненное с возможностью формировать регулируемый тактовый сигнал, управляющий корректируемыми дискретными часами, используемыми для предоставления отсчета времени аналогово-цифровому дельта-сигма преобразователю. Контроллер узла реализует алгоритм управления открытого цикла, который учитывает один или более внутренних или внешних параметров окружающей среды, которые воздействуют на блок, такие как внешняя температура, наклон, напряжение тока, старение кристалла и т.п., для оценки частоты VCO и коррекции оцененной ошибки частоты. Таким образом, блок предпочтительно включает в себя различные датчики, такие как датчик температуры, датчик напряжения тока и/или датчик наклона. В одном из предпочтительных вариантов осуществления вместе с показаниями соответствующих датчиков окружающей среды хранят статистические данные частотной характеристики VCO и используют их для стабилизации частоты. В дополнение к синхронизации локального задания времени беспроводной приемник также используют для обеспечения точной метки времени на локальных событиях, когда работает беспроводной приемник. Измеренные показания датчиков окружающей среды можно использовать для прогнозирования момента, когда необходимо активировать беспроводной приемник для получения сигнала для целей подстройки.
При коррекции накапливающейся ошибки дрейф между эталоном времени и дискретными часами измеряют, используя метку времени на дискретных часах при помощи беспроводного приемника. Беспроводной приемник затем переходит в режим сна с низким энергопотреблением, и частота VCO намеренно сдвигается от своего номинального значения для того, чтобы либо увеличить, либо уменьшить частоту VCO и синтезированных дискретных часов с целью уменьшить величину дрейфа. Для минимизации искажений в дискретных данных системы регистрации, фазово синхронизированной с VCO, реализуется корректировка малого сдвига (<±1E-6) большой длительности. Длительность времени, в которое применяют сдвиг коррекции дрейфа, представляет собой линейную функцию от размера дрейфа, подлежащего коррекции, и значения сдвига частоты VCO. Следом за удалением либо уменьшением накопленного дрейфа продолжает работать непрерывный процесс компенсации частоты открытого цикла для поддержания высокой стабильности VCO до выполнения следующего процесса коррекции накопленной ошибки.
Несмотря на то, что изобретение можно использовать для любого типа сейсмического блока, проводного либо беспроводного, автономного либо связанного с центральной базой, в предпочтительном варианте осуществления изобретение используют в автономном блоке регистрации сейсмических данных с постоянной записью, функционирующем независимо от других блоков. В одном из предпочитаемых вариантов осуществления, автономный блок регистрации сейсмических данных включает в себя полностью закрытый, замкнутый корпус, обладающий стенкой, задающей как минимум одну внутреннюю камеру, в которой закреплены: по меньшей мере один сейсмический датчик, энергонезависимая память, источник тока, достаточный для обеспечения непрерывной работы блока и работы электроники, включая упомянутую выше электронику, используемую для задания времени. Корпус, предпочтительно, конструируется из первой пластины и второй пластины, соединенных их периметрами стенкой, задающей внутреннюю камеру, таким образом получая общую дисковую или цилиндрическую форму.
Краткое описание чертежей
Фиг.1 изображает системную блок-схему проводной системы регистрации сейсмических данных предыдущего уровня техники, использующей для функционирования единую централизованную систему задания;
фиг.2 изображает системную блок-схему узловой системы регистрации сейсмических данных, использующей общую, внешнюю, распределенную систему задания времени для синхронизации работы системы, согласно изобретению;
фиг.3 - схематичный вид элементов системы задания времени в соответствии с представленным изобретением;
фиг.4 - временная диаграмма фазового соотношения между дискретными часами узлов и точкой отсчета внешнего эталона времени (в этом примере 1 PPS GPS) в точке, в которой они синхронизированы, равно как и одно из возможных фазовых соотношений произвольное время спустя;
фиг.5 - временная диаграмма, представляющая один способ, которым можно реализовать процесс калибровки часов в соответствии с изобретением, без искажений в дискретных сейсмических данных;
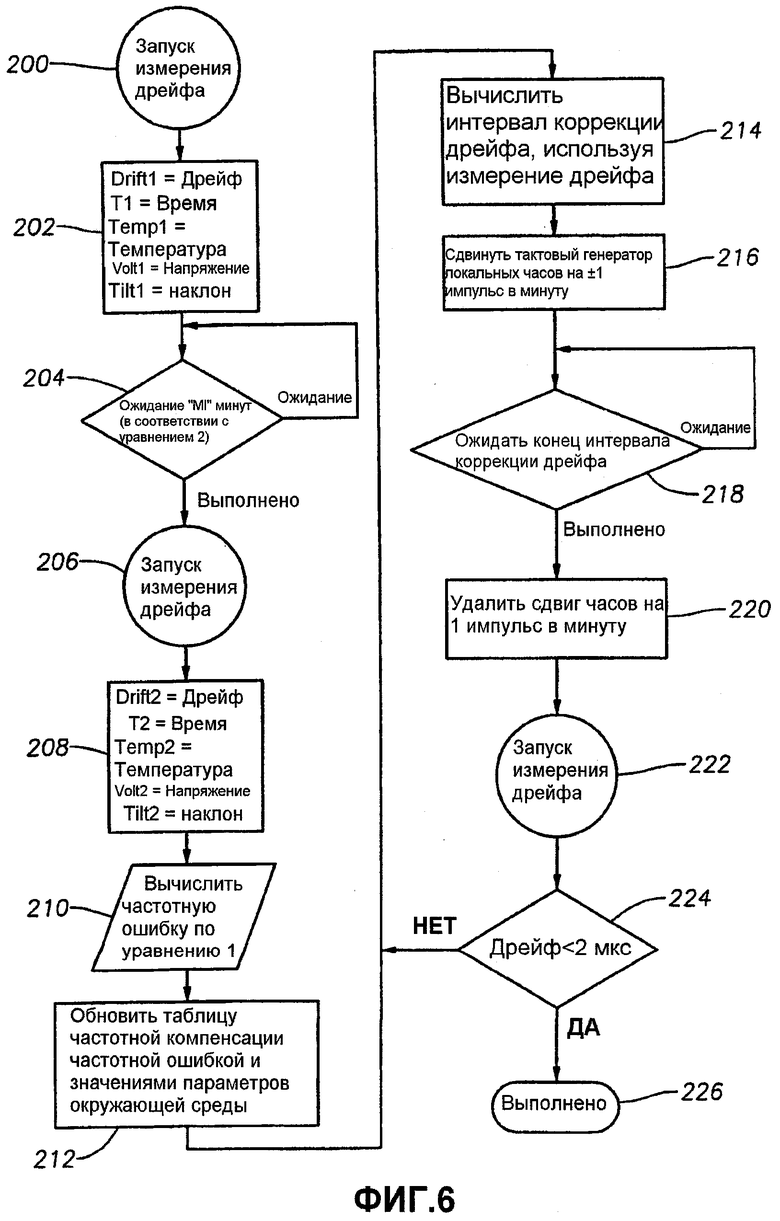
фиг.6 - последовательность операций способа коррекции накапливающейся ошибки в соответствии с изобретением;
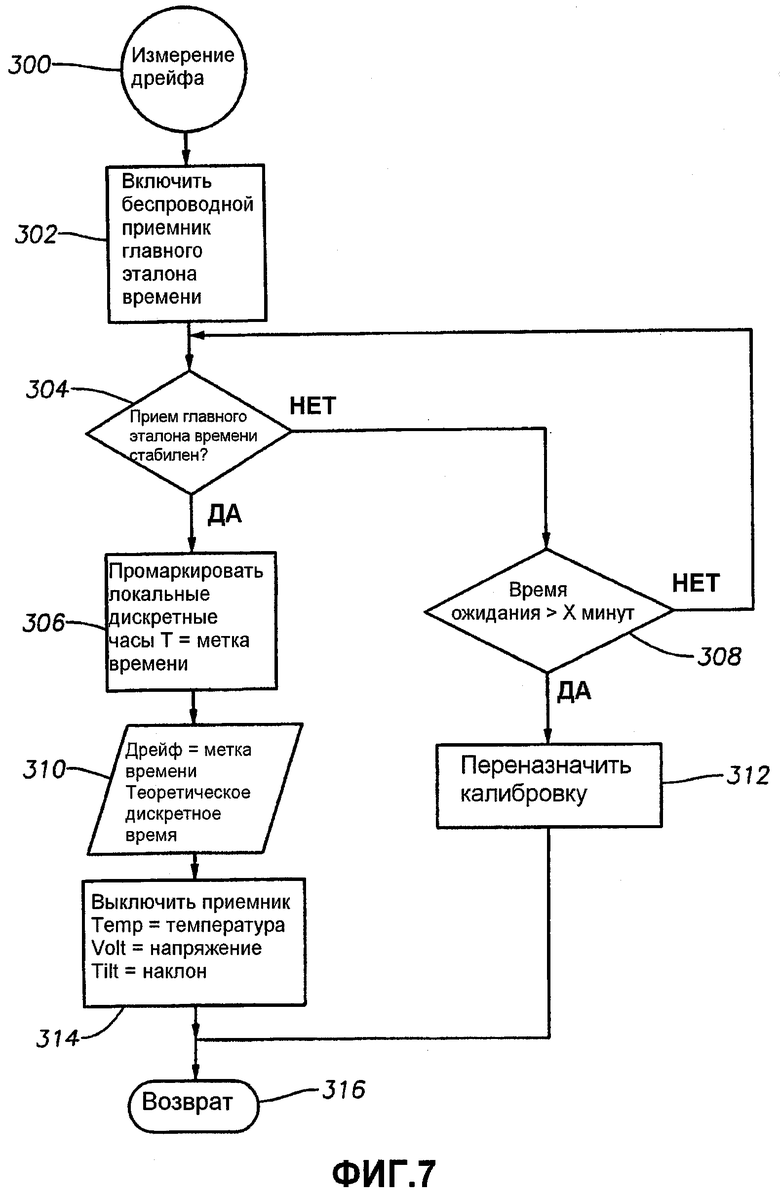
фиг.7 - последовательность этапов, используемых для максимизации интервала между коррекциями накапливающейся ошибки.
Описание предпочтительных вариантов осуществления изобретения
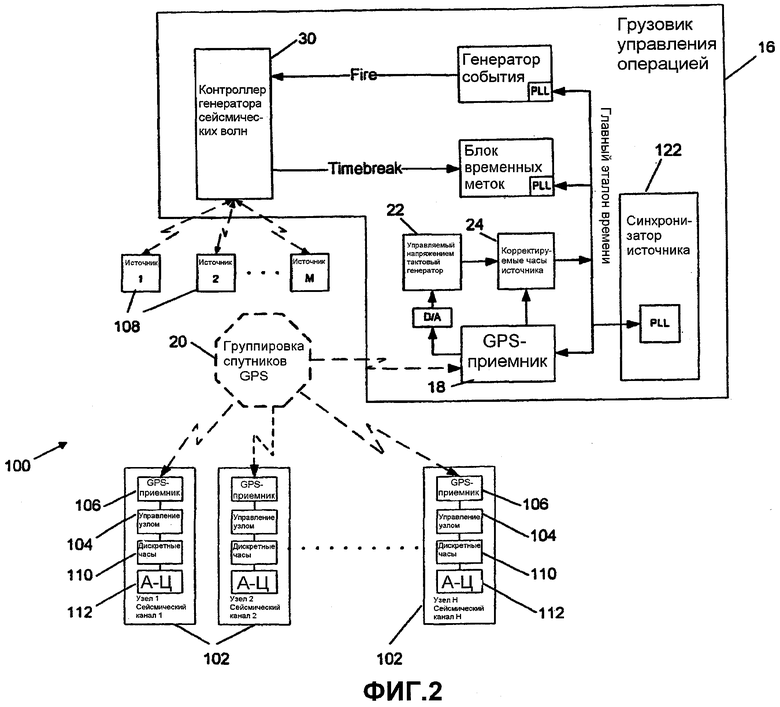
Изобретение реализуется в блоке сейсмической регистрации, таком, как показан на фиг.2, а именно в беспроводном узловом блоке сейсмической регистрации. Конкретно на фиг.2 показана архитектурная блок-схема системного уровня системы 100 сейсмической разведки, которая использует распределенное задание времени из внешнего эталона времени для синхронизации множества автономных, отдельных блоков 102 регистрации сейсмических данных. Распределенное задание времени обеспечивает синхронизацию одним эталоном времени всех отдельных автономных блоков 102 регистрации сейсмических данных во время цикла регистрации. Несмотря на то, что система 100 сейсмической разведки походит на систему 10 сейсмической разведки предыдущего уровня техники (фиг.1), система 100 на фиг.2 автономна, без каких-либо проводных или беспроводных соединения физического уровня с центральным базовым блоком 16, т.е. без управляющего сигнала с базового блока. Вместо этого каждый отдельный блок 102 сейсмической регистрации включает в себя внутренний беспроводной приемник, связывающийся с внешним, точным эталоном 20 времени либо с системой задания времени, такой, как спутники GPS, для коррекции локального задания времени каждого блока 102. Аналогично, несмотря на то, что система 100 сейсмической разведки на фиг.2 обладает блоками, несколько похожими на автономные блоки сейсмической регистрации предыдущего уровня техники, блок предыдущего уровня техники используют в качестве собственных часов точную спутниковую систему задания времени, таким образом, создавая установленные выше недостатки. Однако, как показано на фиг.2, каждый отдельный блок 102 сейсмической регистрации изобретения включает в себя и беспроводной приемник 106 и локальные дискретные часы 110, сконфигурированные для коррекции беспроводным приемником 106 при помощи локального контроллера 104.
На фиг.2 синхронизация источника 108 сейсмических волн с эталоном времени выполняется примерно таким же образом, как и в системе 10 предыдущего уровня техники, показанной на фиг.1. Однако управление 30 источником сейсмических волн системы 100 логически, равно как и физически, отделено от блоков 102 сейсмической регистрации, и его можно разместить там, где это удобнее эксплуатирующей бригаде. Контроллер системы регистрации с фиг.1 заменяется компонентом 122 синхронизатора источника, который обеспечивает нахождение сигнала TIMEBREAK от контроллера 30 источника сейсмических волн на границе дискретного интервала, относительно точки отсчета GPS 1PPS. Распределенные узловые блоки 102 сейсмической регистрации осуществляют доступ к общему эталону времени, используемого в части 120 управления источником системы, для обеспечения возможности синхронизации внутри системы 100 разведки.
Один вариант осуществления синхронизированной, распределенной системы задания времени в узловом блоке 102 регистрации сейсмических данных показан на фиг.3. В то время как показаны только те элементы, которые имеют отношение к части задания времени узлового блока, цельный блок 102 включает в себя сейсмический датчик, подходящую энергонезависимую память и источник питания от батареи для обеспечения непрерывной работы на протяжении периодов времени, превышающих две недели, и, предпочтительно, на весь период размещения блоков 102. Далее, каждый блок сейсмической регистрации включает в себя один или более сейсмических датчиков, таких как сейсмограф. Предпочтительно, чтобы все вышеперечисленные компоненты были размещены в полностью закрытом корпусе, обладающем стенкой для задания как минимум одной внутренней камеры внутри корпуса, в котором закрепляют все компоненты. Специалисты в данной области учтут, что указанные электрические компоненты включают в себя соединения, взаимосоединяющие вышеперечисленное, и в вариантах осуществления изобретения предпочтительно, чтобы все электрические соединения между любыми электрическими компонентами содержались бы в корпусе, превращая каждый блок 102 регистрации данных в полностью замкнутый и устраняя внешние провода или кабели любого типа. Несмотря на то, что корпус может иметь произвольную форму, предпочтительным является придание корпусу формы, улучшающей размещение и соединение с землей, максимизируя площадь поверхности корпуса, находящейся в контакте с землей. В одном из вариантов осуществления корпус состоит из первой пластины, обладающей первым периметром, и второй пластины, обладающей вторым периметром, и где пластины соединяются по их периметрам стенкой, задающей внутреннюю камеру. Стенка может быть цилиндрической, таким образом, чтобы корпус имел бы в общем форму диска или цилиндра.
Для подстройки переменных открытого цикла и поправки синхронизационных ошибок, возникающих из-за ограничений стабильности, налагаемых подходом открытого цикла, иногда требуется прерывистый доступ к эталону времени высокой точности.
Несмотря на то, что изобретение будет описано в терминах системы точного спутникового задания времени, такой как GPS, в других неограничивающих вариантах осуществления источник внешнего эталона времени, с которым синхронизируется каждая система или подсистема, можно реализовать с другими эталонами времени, такими как WWVB или выделенными согласованными передачами времени UHF/VHF. Изобретение не связано с какой-то конкретной точкой отсчета времени, но, предпочтительно, чтобы все узлы и системные элементы разделяли общую точку отсчета для синхронизации процессов регистрации.
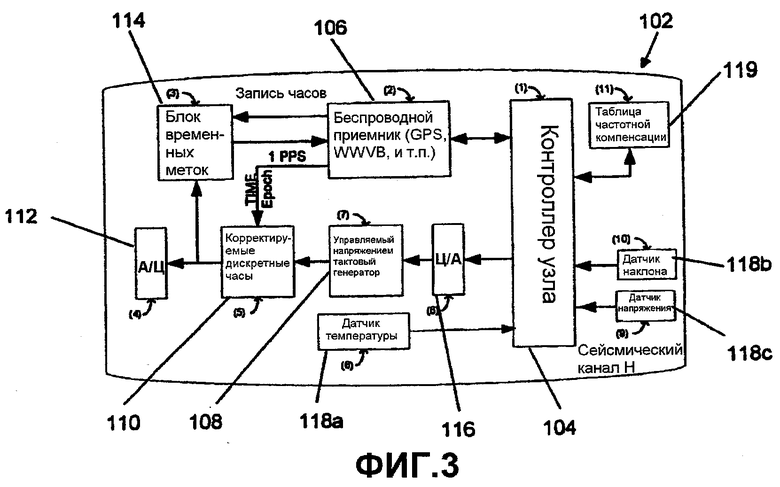
На фиг.3 показана диаграмма локального задания времени узлового блока 102 регистрации сейсмических данных, выполненного в соответствии с представленным изобретением. Части сейсмического блока 102, имеющие отношение к заданию времени, обычно включают в себя контроллер 104 узла, беспроводной приемник 106, регулируемое устройство 108 отсчета времени, такое, как управляемый напряжением тактовый генератор (VCO), корректируемые дискретные часы 110, аналогово-цифровой дельта-сигма преобразователь 112 и блок 114 временных отметок. Цифроаналоговый преобразователь 116 (предпочтительно 16-битный) используют для предоставления аналогового управляющего напряжения на VCO 108 с контроллера 104 узла. Одним из важных аспектов изобретения является использование датчика 118 окружающей среды и таблицы 119 частотной компенсации, как детально описано ниже. Несмотря на то, что регулируемое устройство 108 отсчета времени будет описано как управляемый напряжением тактовый генератор, специалисты в данной области учтут, что таким устройством может быть любой тактовый генератор, способный функционировать так, как описано в настоящем документе, включая, но не ограничиваясь ими, управляемый напряжением кварцевый тактовый генератор, управляемый напряжением кварцевый тактовый генератор с компенсацией температуры (VCTCXO) или управляемый напряжением термостатированный кварцевый тактовый генератор (VCOCXO).
Обычно корректируемые дискретные часы 110 напрямую используют в аналогово-цифровом дельта-сигма преобразователе 112. Эталон времени для дискретных часов 110 предоставляется локальным VCO 108, частота которого управляется локальным контроллером 104 узла (в отличие от того, как сделано в системах предыдущего уровня техники, где VCO напрямую управляется беспроводным приемником). Одним из новшеств изобретения является контроллер 104 узла и функционал, им предоставляемый. Поскольку беспроводной приемник 106 не корректирует локальный VCO 108, блок 102 сейсмической регистрации может использовать режим низкого энергопотребления для экономии питания во время работы. Для целей данного описания "режим низкого энергопотребления" обозначает режим, в котором беспроводной приемник 106 не сообщается с точной системой 20 задания времени. Без прямого, непрерывного доступа к внешнему эталону времени локальный контроллер 104 узла не может напрямую ни измерять частоту VCO 108, ни определить частотную ошибку VCO 108. Вместо этого контроллер 104 узла реализует алгоритм управления открытого цикла, который рассчитывает, из одного или более внутренних или внешних параметров окружающей среды, воздействующих на блок 102, таких как внешняя температура, наклон, напряжение, старение кристалла и т.п., оценку частоты VCO и корректирует оцененную ошибку частоты. Такие условия окружающей среды могут измерять один или более датчиков 118 окружающей среды. Предпочтительны датчики 118 с низким энергопотреблением и непрерывным режимом работы, такие как, например, температурный датчик 118a, датчик 118b наклона и/или датчик 118c напряжения, работающие в процессе управления открытого цикла, который повышает стабильность тактового генератора без необходимости наличия эталона времени с высоким энергопотреблением и непрерывным режимом работы. Без ограничения типов датчиков окружающей среды, которые можно использовать в изобретении, параметры окружающей среды, которые, предположительно, оказывают наиболее значительный эффект на стабильность рабочей частоты VCO, используемой в локальном задании времени, включают в себя температуру, вертикальную ориентацию и напряжение источника питания VCO, где температура обычно является наиболее значительным из этих факторов.
В различных вариантах осуществления изобретения для оценки рабочей частоты VCO можно использовать один или несколько параметров. Специалисты в данной области учтут, что каждый параметр окружающей среды может, в общем, вносить свой вклад в общую нестабильность VCO и, предпочтительно, учитываться в реализации изобретения. Ошибка частоты, температура, наклон и напряжения питания тактового генератора хранятся в компенсационной таблице 119, предпочтительно используя энергонезависимую память, для использования в корректировке VCO 108. Таблица может состоять из Н-мерной матрицы, где Н - целая часть рабочего диапазона состояний окружающей среды устройства, деленная на фиксированный диапазон биннига состояний окружающей среды.
В таблице 1 приведен список обычных факторов стабильности для обычного недорогого кварцевого тактового генератора с низким энергопотреблением.
Из этой таблицы очевидно, что температура оказывает наиболее существенное влияние на стабильность VCO, но даже наклон или уклон тактового генератора может вызывать ошибку синхронизации, превышающие 100 мкс на протяжении интервала 14 часов, если не будет скомпенсирован контроллером открытого цикла, управляющим VCO.
Для реализации алгоритма управления открытого цикла контроллер 104 узла должен установить точное соответствие между измеренными параметрами окружающей среды и результирующей ошибкой частоты VCO 108. Для начальной синхронизации локального задания времени и для измерения ошибки частоты VCO 108 контроллер 104 узла должен иметь доступ к внешнему эталону времени высокой точности. Доступ к внешнему эталону времени предоставляется беспроводным приемником 106. Несмотря на то, что беспроводной приемник 106 не используется в качестве системных часов, как на предыдущем уровне техники, беспроводной приемник 106 служит двум целям в этом варианте осуществления изобретения: во-первых, он используется для предоставления эталонной точки отсчета 1PPS, с которой синхронизируются дискретные часы 110, и, во-вторых, он используется для предоставления точной маркировки времени, при помощи блока 114 временной маркировки, аналогово-цифровых дискретных часов.
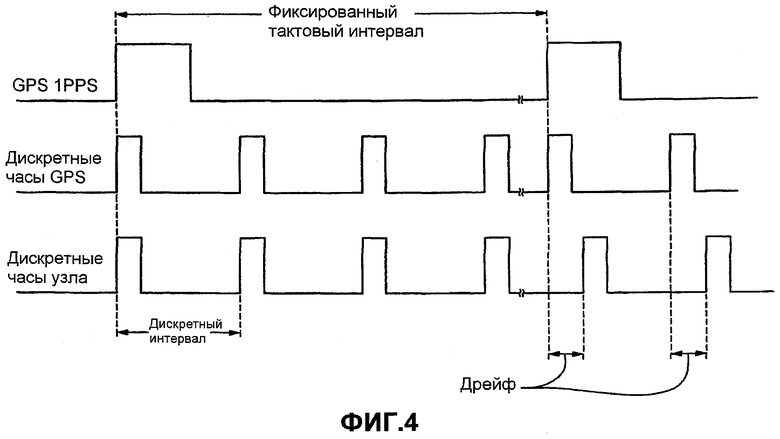
На фиг.4 проиллюстрирована начальная синхронизация дискретных часов с эталонной точкой отсчета времени (GPS 1PPS в примере фиг.4) и расхождение дискретых часов и эталона времени на протяжении произвольного периода времени. Разница в метках времени между двумя дискретными часами используют для определения ошибки частоты VCO. Как упомянуто выше, ошибка частоты, температура, наклон и напряжения питания тактового генератора хранятся в частотной компенсационной таблице 119 для использования в коррекции тактового генератора. В процессе коррекции контроллер 104 узла постоянно измеряет характеристику стабильности частоты тактового генератора, как функцию параметров окружающей среды. Затем контроллер открытого цикла, который корректирует VCO 108, использует эту функциональную связь для управления частотой тактового генератора. Интервал между измерениями частоты, предпочтительно, максимизируют для уменьшения количества времени, которое блок 102 сейсмической регистрации проводит в режиме высокого энергопотребления, т.е. когда используют беспроводной приемник 106. Контроллер 104 узла использует адаптивный алгоритм, максимизирующий интервал калибровки на основании ранее измеренной стабильности тактового генератора и изменении амплитуды датчиков 118 окружающей среды. Интервал удлиняют для более стабильных тактовых генераторов и укорачивают для менее стабильных тактовых генераторов. Несмотря на то, что этот адаптивный и непериодический интервал, основанный на стабильности тактового генератора, является предпочтительной реализацией изобретения, данный интервал можно также определять через регулярные промежутки времени или при изменении параметров окружающей среды.
Вне зависимости от уровня стабильности частоты, который можно реализовать контроллером открытого цикла, корректирующего VCO, всегда будет существовать некоторая нестабильность, которая будет приводить к расхождению частоты локального VCO 108 и внешнего эталона 20 времени. Расхождение, в основном, возникает из-за допусков стабильности в тактовом генераторе VCO, и его необходимо корректировать до достижения степени расхождения, превышающей геофизически существенный уровень. На фиг.4 это расхождение обозначено как "дрейф". Способ коррекции ошибки дрейфа представляет собой отдельный от способа постоянной коррекции частоты VCO процесс. Несмотря на то, что каждый способ можно использовать независимо один от другого в блоке сейсмической регистрации, в предпочитаемом варианте осуществления изобретения, в блоках сейсмической регистрации по настоящему изобретению используют оба способа. Коррекция дрейфа требует наличия внешнего эталона 20 времени (в данном примере GPS) для измерения дрейфа и не использует в алгоритме коррекции никакие из датчиков окружающей среды.
На фиг.5 приведен пример процесса калибровки часов, который включает в себя пример полной коррекции дрейфа дискретных часов 110 с фиг.3. Дрейф между эталоном времени и дискретными часами 110 измеряют, используя, с помощью приемника 106 GPS, метки времени на дискретных часах 110. После этого GPS приемник переходит в режим сна с низким энергопотреблением, и частоту VCO 108 намеренно сдвигают от ее номинального значения для увеличения или уменьшения частоты VCO и синтезированных дискретных часов, с целью уменьшения величины дрейфа. Как показано на фиг.5, этого можно достигнуть, сдвигая частоту на большую величину на короткий промежуток времени (как в области "A") или на небольшое значение на длительный промежуток времени (как в области "B"). Для целей простого уменьшения интервала дрейфа большое значение сдвига частоты уменьшит интервал быстрее всего, как показано в области "A", как выполняется в существующих корректируемых GPS часах, таких, как те, что используют в системе предыдущего уровня техники (фиг.1). Однако большое изменение частоты VCO создает искажения в дискретных данных системы регистрации, которая фазово связана с VCO, поскольку быстрая смена в частоте часов создает дискретный внутриполосный шум в аналогово-цифровых дельта-сигма преобразователях 112. Как следствие, изобретение предоставляет маленький сдвиг (<+1E-6), длительного промежутка коррекции, как показано в области "B". Длительность времени, в которое применяют сдвиг коррекции дрейфа по представленному изобретению, представляет собой линейную функцию от размеров дрейфа, подлежащего коррекции, и величины, на которую сдвигают частоту VCO. Следом за полной коррекцией либо уменьшением накопленного дрейфа непрерывный процесс компенсации частоты открытого цикла продолжает работать с целью поддержания высокой стабильности VCO в промежутке перед выполнением следующего процесса коррекции дрейфа. Избегая грубой коррекции, как делается на предыдущем уровне техники, и распределяя коррекцию на более длительное время, минимизируют искажения данных.
Снова обращаясь к фиг.3, контроллер 104 узла связан с беспроводным приемником 106. Контроллер 104 узла обычно представляет собой микропроцессор, реализующий алгоритмы, задействованные в процессах инициализации, управления и протоколирования, связанных с локальной разверткой времени. Беспроводной приемник 106 предоставляет доступ к внешнему эталону 20 времени высокой точности, такому, как группировка спутников GPS, WWVB, специальный радиосигнал или аналогичная точная система задания времени. Беспроводной приемник 106 выполняет две функции, а именно синхронизацию локальной системы задания времени и меток времени локальных событий, таких, как дискретные часы 106, измеряющие время для аналогово-цифровых преобразователей 110.
Дискретные часы 112 аналогово-цифрового преобразователя используют в качестве источника корректируемых дискретных часов 110, которые синхронизируют с точкой отсчета времени (например, 1PPS) при помощи беспроводного приемника 106 и дискретный интервал которых устанавливает контроллер 104 узла. Корректируемые дискретные часы 110 синтезируют дискретные часы, используемые аналогово-цифровым преобразователем 112 из источника частоты, предоставленного VCO 108. Рабочая частота VCO 108 настраивается процессами управления, исполняемыми контроллером 104 узла, путем варьирования аналогового управляющего ввода на VCO 108. Контроллер 104 узла использует для предоставления аналогового управляющего напряжения 16-битный цифроаналоговый преобразователь. Процесс управления открытого цикла, реализованный в контроллере 104 узла, использует в процессе управления VCO 108, измерения окружающей среды, предоставленные температурным датчиком 118a, датчиком 118c напряжения и/или датчиком 118b наклона. Статические данные частотной характеристики VCO 108 сохраняются наряду со связанными показаниями датчиков окружающей среды в таблице 119 частотной компенсации, находящейся в энергонезависимой памяти.
Контроллер 104 узла инициализирует локальное задание времени, сначала устанавливая надежное соединение, при помощи беспроводного приемника 106 к внешнему общему эталону времени, используемому всеми узлами и подсистемами сейсмической системы. Контроллер 104 узла калибрует реакцию VCO 108 на изменения аналогового напряжения, подаваемого цифроаналоговым преобразователем 116, и сохраняет результирующее значение масштаба для дальнейшего использования его в процессе коррекции. Беспроводной приемник 106 реплицирует локальную версию точки отсчета времени (например, 1PPS), используемой всеми узлами и подсистемами, с которыми будут синхронизированы корректируемые дискретные часы 110. Корректируемые Дискретные часы 110 синтезируют циклические Дискретные часы с периодом, указанным контроллером 104 узла, используемым аналогово-цифровым преобразователем 112 для преобразования аналогового представления сейсмического датчика в цифровой формат. Следом за начальной синхронизацией Дискретных часов и внешней точки отсчета времени беспроводной приемник 106 можно перевести в режим низкого энергопотребления для экономии батарейного ресурса и включают на контроллере 104 узла процесс частотной компенсации.
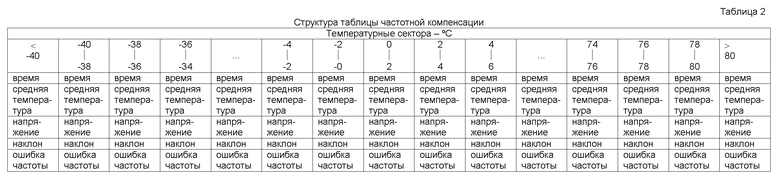
Процесс частотной компенсации, используя таблицу 119 частотной компенсации, периодически исполняется на контроллере 104 узла и реализует алгоритм управления "открытого цикла", использующий эмпирически установленную связь между различными параметрами окружающей среды и рабочей частотой VCO 108, для максимизации стабильности частотного вывода VCO 108. Процесс управления открытого цикла использует косвенную обратную связь для коррекции выходной частоты, поскольку прямое измерение частоты потребует наличия доступа к точной частоте или эталону времени. Это, в свою очередь, потребует использования беспроводного приемника 106, который потребляет ограниченные ресурсы батарейного питания. Контроллер открытого цикла использует текущие значения, предоставленные температурным датчиком 118a, датчиком 118c напряжения и датчиком 118b наклона, равно как и историю рабочей характеристики VCO 108 в таблице 119 частотной компенсации. Одна из возможных структур таблицы 119 частотной компенсации показана в таблице 2. Таблицу 119 частотной компенсации можно представить как линейную матрицу, проиндексированную текущей внешней рабочей температурой узла. Спектр рабочих температур узла поделен на небольшие клетки диапазонов температур (например, 2 градуса цельсия, как в таблице 2), содержащие время, в которое проходило последнее измерение ошибки частоты VCO 108 в указанном в клетке температурном диапазоне. Также в клетке хранится точная температура, при которой измерялись частота, параметры окружающей среды и результирующая ошибка частоты VCO 108.
Контроллер открытого цикла сформирует интерполирующее уравнение, относящееся к ошибке частоты и средней температуре клетки, совпадающей с текущей рабочей температурой и для ближайшей следующей за текущей рабочей температурой клетки. Затем результирующее уравнение разрешают, используя настоящую текущую рабочую температуру для оценки ошибки частоты, подлежащей коррекции. Контроллер открытого цикла использует оценку ошибки частоты, равно как и значение масштаба, вычисленное во время процесса инициализации, для регулировки управляющего напряжения на VCO 108 для улучшения стабильности частоты тактового генератора.
Для корректировки устаревания данных VCO 108 контроллер открытого цикла запрашивает новое измерение частоты, если последнее измерение было выполнено более, чем за 5 дней до настоящего времени. Также будет запрошено обновление величины ошибки частоты, если текущий уровень напряжения на тактовом генераторе отличается на величину, превосходящую ±0,5%, или если текущее значение наклона отличается от содержащихся в клетке более чем на ±15 градусов.
Измерение ошибки частоты тактового генератора требует наличия внешнего эталона времени, предоставляемого беспроводным приемником 106. Ошибка частоты вычисляется путем измерения дрейфа, показанного на фиг.4, на протяжении точного интервала времени. Уравнение, приведенное ниже, используют для вычисления ошибки частоты VCO 108.

где FreqError в Герцах; FNominal - идеальная либо целевая частота, предназначенная для VCO 108, в Герцах; Driftl и Drift2 и T1 и T2 в секундах. Интервалом времени между измерением первого значения дрейфа (Drift1) и второго значения дрейфа (Drift2) является значение T2-T1. Требуемая длина этого интервала измерения является функцией от желаемой точности измерения ошибки частоты и точности, с которой можно измерить значения дрейфа. Уравнение 2 используют для вычисления требуемого интервала, на протяжении которого измеряют ошибку частоты:

где MI - интервал измерения; ME - ошибка измерения, в секундах; FNominal и FT - допуск по частоте, в герцах. Например, если частота FNominal 10.24 МГц, ME 55 нсек и FT 5 мГц, то интервал измерения будет как минимум 226 секунд. Во время этого интервала беспроводной приемник 106 переводят в режим сна с низким энергопотреблением для экономии ресурса питания.
Предшествующий процесс, описывающий способ частотной компенсации изобретения, предоставлен для обеспечения возможности калибровки локальных часов с использованием внешнего эталона времени, доступ к которому непостоянен или прерывист. Это формирует одно из новшеств изобретения, заключающегося в том, что коррекции, предпочтительно "непериодические", на основании состояния окружающей среды и их эффекта на локальное задание времени, косвенно получаемое из внешнего эталона времени. Дополнительно, изобретение предоставляет способ коррекции дрейфа для локального устройства измерения времени блока регистрации сейсмических данных. Способ коррекции дрейфа можно использовать совместно с или отдельно от способа частотной компенсации.
Когда применяют способ частотной компенсации и таблица 119 частотной компенсации пополняется новым измерением ошибки частоты, предпочтительно, чтобы был применен способ коррекции дрейфа. Когда обновляют таблицу частотной компенсации, измеряют дрейф дискретных часов по отношению к внешней системе задания времени. Этот дрейф, показанный на фиг.4, необходимо устранить с целью сохранения дискретных часов в пределах указанных допусков. На фиг.5 приведен пример процесса калибровки часов, включающий в себя процесс коррекции дрейфа, равно как и процесс измерения ошибки частоты VCO 108, как описано выше, в описании процесса частотной компенсации.
Этапы способа частотной компенсации и способа коррекции дрейфа проиллюстрированы на блок-схемах с фиг.6 и 7. Нижеприведенные этапы (a) и (b) осуществляют способ частотной компенсации, а этапы (c), (d) и (e) осуществляют способ коррекции дрейфа:
a) Включить беспроводной приемник 106 для приема внешнего эталона времени и промаркировать локальные корректируемые дискретные часы 110 (Этап 200). Вычислить Drift1 (Этап 202) из уравнения 1. Измерением Drift1 является разница во времени между меткой из Этапа 200 и теоретическим временем, на которое должны были бы указывать дискретные часы. Записать текущие величины релевантных факторов окружающей среды (Этап 202), такие, как значения с датчика 118a температуры, датчика 118c напряжения и датчика 118b наклона. Отключить беспроводной приемник 106 для экономии питания и выждать интервал времени, как минимум больший, чем интервал, посчитанный с использованием уравнения 2 (Этап 204).
b) Включить беспроводной приемник 106 для приема внешнего эталона времени и промаркировать локальные корректируемые дискретные часы 110 (Этап 206). Вычислить Drift2 и связанные параметры окружающей среды (Этап 208). Измерением Drift2 из уравнения 1 является разница во времени между меткой времени из Этапа 206 и теоретическим временем, на которое должны были бы указывать дискретные часы. Разница между двумя метками времени представляет собой интервал T2-T1 из уравнения 1, из которого можно вычислить ошибку частоты (Этап 210). Вычислить средние для различных параметров окружающей среды блока, таких, как температура, напряжение и наклон на протяжении интервала измерения. Отключить беспроводной приемник 106 для экономии питания. Обновить таблицу 119 частотной компенсации текущим временем и средними значениями параметров окружающей среды (Этап 212). Убедиться, что процесс частотной компенсации обновил рабочую частоту VCO 108.
с) На основании измерения Drift1 вычислить длительность времени, т.е. интервал коррекции дрейфа, требующийся для устранения значения дрейфа, если частота VCO 108 была сдвинута в ±1Е-6 раз номинальной частоты VCO 108 (Этап 214). Сдвинуть частоту VCO 108 на величину сдвига ±1Е-6 (Этап 216) и ждать завершения интервала коррекции дрейфа (Этап 218).
d) Включить беспроводной приемник 106 для приема внешнего эталона времени и промаркировать локальные корректируемые дискретные часы 110 (Этап 222). Обесточить беспроводной приемник 106. Третьим измерением дрейфа является разница во времени между меткой времени из Этапа 222 и теоретическим временем, на которое должны были бы указывать дискретные часы. Третье измерение дрейфа должно быть близким к нулю. На этапе 224 определяют, приемлемо ли значение или необходимо снова выполнить процесс коррекции дрейфа. Если значение за пределами интервала в ±2 мсек, то процесс необходимо выполнить снова. Необходимо вычислить новый интервал коррекции дрейфа, исполняя этапы процесса, и сдвиг частоты в ±1Е-6 нужно сохранять. Надо отметить, что полярность сдвига можно менять в том случае, если начальная коррекция превзошла необходимую коррекцию дрейфа.
e) Удалить коррекционный частотный сдвиг ±1Е-6 и продолжить выполнение периодического процесса частотной компенсации (Этап 226).
Интервал между коррекциями дрейфа необходимо держать максимальным с целью минимизировать активации беспроводного приемника 106 и, таким образом, минимизировать потребление питания. Этот интервал определяется в соответствии с процессом с фиг.7, при помощи адаптивного алгоритма, вычисляющего среднюю стабильность VCO 108 с момента последней коррекции дрейфа и также за последние 24 часа работы. Таким образом, последнюю коррекцию дрейфа определяют на Этапе 300. На этапе 302 беспроводной приемник 106 включают для приема внешнего эталона времени. Для прогнозирования момента, в который VCO 108 превысит заранее определенный процент максимального синхронизационного интервала, используют наибольшее значение стабильности. В одном из вариантов осуществления заранее определенный процент установлен на 70%. В этот момент следующее обновление таблицы 119 частотной компенсации и цикл коррекции дрейфа вносятся в план на выполнение. Однако, если запланированное время попадает на период времени, про который известно, что на его протяжении доступ к внешнему эталону времени будет ухудшен, калибровочный процесс будет запланирован таким образом, чтобы исполнить ранее, чем рассчитано, и вне известного периода плохого приема. Например, если в качестве эталона времени используют систему GPS, и полученный Альманах указывает, что в запланированное время X спутники доступны не будут, то процесс калибровки часов будет запланирован на время Y, когда будет доступно несколько спутников и где время Y наступает ранее, чем время X.
На основании вышеизложенного необходимо учитывать, что способ, в соответствии с изобретением, минимизирует энергопотребление автономных блоков регистрации сейсмических данных путем прерывистого использования беспроводного приемника для доступа к внешнему точному эталону времени. Далее необходимо учитывать, что изобретение также охватывает те случаи, когда беспроводной сигнал недоступен для использования точного эталона времени.
Несмотря на то, что в настоящем документе подробно описаны определенные свойства и варианты осуществления изобретения, необходимо понимать, что изобретение охватывает все модификации и улучшения в области и духе приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И КОРРЕКЦИИ ТАКТОВОЙ ЧАСТОТЫ АВТОНОМНОГО РЕГИСТРАТОРА СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2008 |
|
RU2366981C1 |
| Устройство, способ и машиночитаемый носитель для автономной регистрации сейсмических данных | 2024 |
|
RU2836136C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА РАЗРАБОТКИ НЕФТЯНЫХ И ГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2022 |
|
RU2799398C1 |
| ЦИФРОВОЙ СЕЙСМОМЕТР | 2022 |
|
RU2799344C1 |
| УСТРОЙСТВО И СПОСОБ (ВАРИАНТЫ) ХРОНИРОВАНИЯ ИНФОРМАЦИИ АВТОНОМНОЙ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ | 2004 |
|
RU2277298C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ СЪЕМКИ | 2016 |
|
RU2729952C2 |
| УСТРОЙСТВО И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ, СИСТЕМА СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2004 |
|
RU2450255C2 |
| УСТРОЙСТВА И СПОСОБЫ ПОДСТРОЙКИ ЧАСТОТЫ В СИНТЕЗАТОРЕ ЧАСТОТ С МНОЖЕСТВОМ ВЫХОДОВ | 2008 |
|
RU2476990C2 |
| Способ повышения точности тактовой и цикловой синхронизации в системах связи | 2017 |
|
RU2669707C1 |
| СПОСОБ СИНХРОНИЗАЦИИ В СИСТЕМЕ СБОРА ДАННЫХ | 2015 |
|
RU2669012C2 |
Группа изобретений относится к способу и устройству для управления и коррекции заданий времени, используемых в распределенной узловой системе сейсмического приема. Так, беспроводной блок регистрации сейсмических данных оборудован беспроводным приемником, предоставляющим доступ к общему внешнему эталону времени, разделяемому множеством блоков регистрации сейсмических данных в сейсмической системе. Приемник выполнен с возможностью реплицировать локальную версию внешней точки отсчета времени, с которой синхронизируют аналогово-цифровой преобразователь сейсмического датчика. Приемник выполнен с возможностью реплицировать локальную версию общего внешнего эталона времени для простановки временных меток на локальные события узла. Приемник можно переключать в нерабочий режим с низким энергопотреблением на промежутки времени, в которые блок регистрации сейсмических данных продолжает записывать сейсмические данные, таким образом экономя батарейное питание блока. Система реализует способ для коррекции локальных часов времени на основании прерывистого доступа к общему внешнему эталону времени. Способ корректирует локальное время часов с помощью управляемого напряжением тактового генератора для учета вызванных условиями окружающей среды ошибок времени. Дополнительно изобретение предоставляет более стабильный способ коррекции дрейфа локальных часов времени. Технический результат - минимизация энергопотребления, повышение точности получения данных. 6 н. и 27 з.п. ф-лы, 7 ил.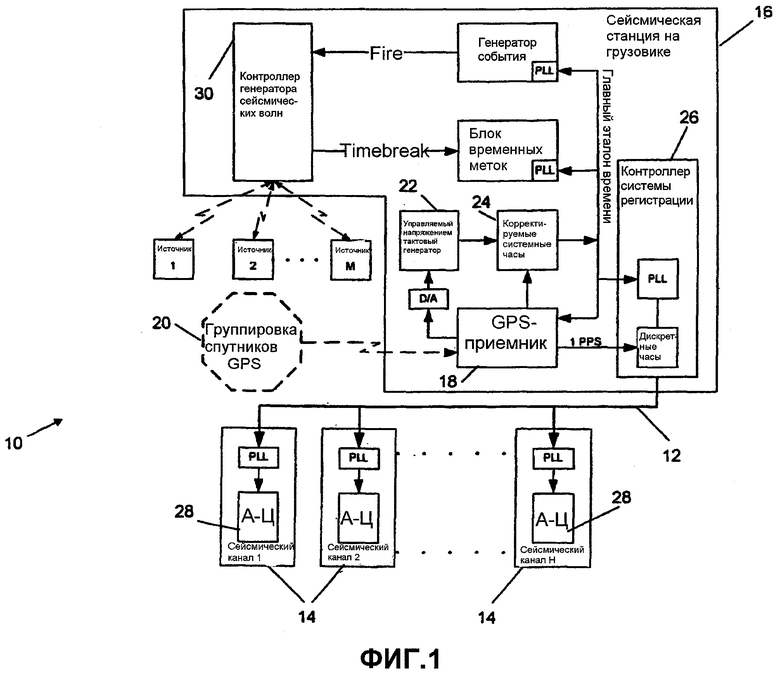
1. Блок регистрации сейсмических данных, содержащий
а) сейсмический датчик;
b) управляющий процессор, выполненный с возможностью реализовывать управляющий процесс для локального задания времени;
с) дискретные часы, используемые для инициирования аналогово-цифрового преобразования выходных данных указанного сейсмического датчика;
d) датчик окружающей среды, выполненный с возможностью осуществлять связь с управляющим процессором и предоставлять данные о локальном состоянии окружающей среды; и
e) регулируемое устройство тактового сигнала, выполненное с возможностью генерировать регулируемый тактовый сигнал для часов;
f) беспроводной приемник, выполненный с возможностью связываться с управляющим процессором и энергонезависимой памятью и переходить в режим низкого энергопотребления в случае неиспользования;
g) источник питания, выполненный с возможностью обеспечивать работу блока;
причем управляющий процессор выполнен с дополнительной возможностью корректировать регулируемое устройство тактового сигнала, использующее данные, полученные от датчика окружающей среды, посредством регулирования частоты регулируемого устройства тактового сигнала.
2. Блок регистрации по п.1, дополнительно содержащий таблицу частотной компенсации, содержащую измерения ошибок частоты тактового генератора с метками времени как функцию от данных о состоянии окружающей среды.
3. Блок регистрации по п.1, в котором датчик окружающей среды представляет собой датчик температуры.
4. Блок регистрации по п.1, в котором датчик окружающей среды представляет собой датчик напряжения, выполненный с возможностью отслеживать напряжение питания тактового генератора.
5. Блок регистрации по п.1, в котором датчик окружающей среды представляет собой датчик наклона.
6. Блок регистрации по п.1, в котором настраиваемым устройством тактового сигнала является управляемый напряжением тактовый генератор.
7. Способ построения таблицы частотной компенсации, используемой во временной синхронизации блока регистрации сейсмических данных, причем указанный способ содержит этапы, на которых:
a) обеспечивают блок регистрации сейсмических данных, включающий в себя беспроводной приемник, локальный тактовый генератор и локальные дискретные часы;
b) осуществляют беспроводной доступ к внешнему эталону времени;
c) определяют ошибку частоты локального тактового генератора путем сравнения меток времени внешнего эталона времени локальных аналогово-цифровых дискретных часов на протяжении интервала времени, выбранного для предоставления данной точности частоты для различных погрешностей меток времени; и
d) сохраняют в таблице частотной компенсации в блоке регистрации сейсмических данных структуру параметров, включающую в себя (i) измеренную ошибку частоты, (ii) эталон времени, определенный из внешнего эталона времени, и (iii) измеренное состояние рабочей окружающей среды тактового генератора, наблюдаемое на протяжении интервала времени измерения частоты.
8. Способ по п.7, в котором измеренное состояние рабочей окружающей среды тактового генератора представляет собой среднее из множества измеренных состояний рабочей окружающей среды тактового генератора, полученных в течение интервала времени измерения.
9. Способ по п.7, в котором этап сохранения дополнительно содержит этап измерения средней рабочей температуры тактового генератора в течение интервала измерения и включения в таблицу частотной компенсации измеренной рабочей температуры тактового генератора.
10. Способ по п.7, в котором этап сохранения дополнительно включает в себя этап измерения среднего рабочего напряжения тактового генератора на протяжении интервала измерения и включения измеренного рабочего напряжения тактового генератора в таблицу частотной компенсации.
11. Способ по п.7, в котором этап сохранения дополнительно содержит этап измерения среднего наклона блока регистрации сейсмических данных в течение интервала измерения и включения измеренного наклона в таблицу частотной компенсации.
12. Способ по п.7, дополнительно содержащий этап, на котором:
a) определяют текущее рабочее напряжение питания локального тактового генератора;
b) определяют сохраненное рабочее напряжение питания, соответствующее текущей рабочей температуре, хранящейся в памяти; и
c) непериодически обновляют частоту локального тактового генератора на основании разницы двух определенных значений.
13. Способ по п.7, дополнительно содержащий этап, на котором:
a) определяют текущую рабочую температуру локального тактового генератора;
b) идентифицируют значение коррекции ошибки в локально сохраненных данных на основании определенной рабочей температуры; и
c) непериодически обновляют частоту локального тактового генератора на основании значения коррекции ошибки.
14. Способ по п.7, дополнительно содержащий этап, на котором:
a) определяют текущий наклон блока регистрации сейсмических данных;
b) определяют сохраненный наклон блока регистрации сейсмических данных, соответствующий текущей рабочей температуре, сохраненной в памяти; и
c) непериодически обновляют частоту локального тактового генератора на основании разницы двух определенных значений.
15. Способ по п.7, дополнительно содержащий этапы, на которых непериодически обновляют частоту локального тактового генератора, когда прошедшее с момента последнего измерения время превышает произведение краткосрочного среднего дрейфа локального тактового генератора, измеренного на протяжении последнего калибровочного интервала и прошедшего времени с предыдущего измерения частоты.
16. Способ по п.7, дополнительно содержащий этапы, на которых непериодически обновляют частоту локального тактового генератора, когда прошедшее с момента последнего измерения время превышает произведение долгосрочного среднего дрейфа локального тактового генератора на протяжении последних 24 часов и прошедшего времени с предыдущего измерения частоты.
17. Автономный блок регистрации сейсмических данных, содержащий:
a) полностью закрытый, замкнутый корпус, имеющий стенку, задающую, по меньшей мере, одну внутреннюю камеру;
b) по меньшей мере, один сейсмограф, прочно закрепленный внутри указанного корпуса, причем указанный сейсмограф обладает, по меньшей мере, одним электрическим соединением, причем все электрические соединения с указанным прочно закрепленным сейсмографом расположены внутри указанного корпуса;
с) дискретные часы, размещенные внутри указанного корпуса и выполненные с возможностью инициировать аналогово-цифровое преобразование данных от сейсмического датчика;
d) источник питания, размещенный в указанном корпусе;
е) устройство, записывающее сейсмические данные, размещенное в указанном корпусе;
f) управляющий процессор, размещенный в указанном корпусе и посредством которого реализован управляющий процесс для локального задания времени;
g) беспроводной приемник, размещенный в указанном корпусе и связанный с указанным управляющим процессором, причем указанный приемник выполнен с возможностью принимать тактовый сигнал от внешнего эталона времени и переходить в режим низкого энергопотребления, когда приемник не работает;
h) датчик окружающей среды, связанный с управляющим процессором и выполненный с возможностью предоставлять данные о локальном измеренном состоянии; и
i) регулируемое устройство тактового сигнала, выполненное с возможностью генерирования регулируемого тактового сигнала для часов, причем указанное регулируемое устройство тактового сигнала сконфигурировано для корректировки управляющим процессором, использующим данные от датчика окружающей среды;
j) причем корпус включает в себя первую пластину и вторую пластину, соединенные вместе указанной стенкой, задающей внутреннюю камеру.
18. Блок регистрации по п.17, в котором указанный корпус имеет цилиндрическую форму.
19. Блок регистрации по п.17, в котором настраиваемым устройством тактового сигнала является управляемый напряжением тактовый генератор.
20. Способ обеспечения тактового сигнала с управляемой частотой для блока регистрации сейсмических данных, причем способ содержит этапы, на которых:
а) генерируют локальный тактовый сигнал для блока регистрации сейсмических данных;
b) обеспечивают устройство, выполненное с возможностью регулировать указанный локальный тактовый сигнал;
с) обеспечивают локальный беспроводной приемник, выполненный с возможностью конфигурирования в первый режим, в котором беспроводной приемник является временно неиспользуемым, и второй режим, в котором приемник активен и способен обнаруживать внешний тактовый сигнал;
d) переключают указанный приемник в его второй режим и обнаруживают тактовый сигнал;
e) переключают приемник в его первый режим следом за обнаружением тактового сигнала;
f) измеряют набор данных об окружающей среде; и
g) используют набор данных об окружающей среде и тактовый сигнал для обеспечения возможности регулировки устройством локального тактового сигнала.
21. Способ по п.20, содержащий этапы, на которых:
обеспечивают набор данных, характеризующий окружающую среду, сопоставляя данные, характеризующие окружающую среду, и временные ошибки устройства;
используют набор данных, характеризующий окружающую среду, и набор данных об окружающей среде для генерирования регулировки для локального тактового сигнала.
22. Способ по п.21, в котором тактовый сигнал является периодичным напряжением, обладающим номинальной частотой.
23. Способ по п.21, дополнительно содержащий этапы, на которых отслеживают параметры окружающей среды на предмет их изменения и генерируют вторую регулировку для локального тактового сигнала при обнаружении изменения параметров окружающей среды.
24. Способ по п.21, содержащий этап, на котором генерируют регулировку для локального тактового сигнала через регулярные, заранее определенные интервалы времени.
25. Способ по п.21, в котором параметры окружающей среды выбирают из группы, состоящей из температуры, наклона и напряжения.
26. Способ по п.21, дополнительно содержащий этапы, на которых:
a) обеспечивают тактовый сигнал в начале и конце первого интервала времени;
b) сравнивают локальный тактовый сигнал с тактовым сигналом в начале указанного первого интервала времени и определяют первую временную ошибку;
c) сравнивают стабильный тактовый сигнал с тактовым сигналом в конце указанного первого интервала времени и определяют вторую временную ошибку;
d) определяют первую поправку частотной коррекции, используя значения первой и второй временных ошибок, первого интервала времени и номинальной частоты;
e) устанавливают второй интервал времени;
f) определяют, используя значения для второй временной ошибки, второго интервала времени и номинальной частоты, вторую поправку частотной коррекции для уменьшения временной ошибки до допустимого уровня на конец второго интервала;
g) применяют первую и вторую частотные поправки к стабильному тактовому сигналу в начале и вскоре после начала второго интервала времени; и
h) удаляют вторую частотную коррекцию из стабильного тактового сигнала в конце указанного второго интервала времени.
27. Способ по п.21, дополнительно содержащий этапы, на которых:
a) обеспечивают функцию локальных часов, полученную из стабильного тактового сигнала;
b) обеспечивают внешние главные часы, удаленные от блока регистрации сейсмических данных;
c) синхронизируют стабильный тактовый сигнал и указанную функцию локальных часов с внешними главными часами в начале указанного интервала времени;
d) определяют разницу во времени между функцией локальных часов и главными часами в конце указанного интервала времени; и
e) пропорционально распределяют разницу во времени на протяжении указанного интервала времени, используя пропорционально распределенные временные значения для коррекции временных значений для данных, полученных с использованием стабильного тактового сигнала.
28. Способ по п.27, в котором зарегистрированные значения данных можно корректировать, используя пропорционально распределенную разницу во времени на протяжении указанного интервала времени путем интерполяции и сдвига зарегистрированных значений данных на их корректированное время.
29. Способ по п.21, дополнительно содержащий этап, на котором определяют временную ошибку на основании внешних часов и при каждом определении временной ошибки обновляют первый набор данных, характеризующих окружающую среду для устройства, путем измерения набора данных об окружающей среде и добавляют эту информацию вместе с временной ошибкой и информацией об измерении времени к первому набору данных, характеризующих окружающую среду для устройства.
30. Способ по п.21, содержащий этап, на котором генерируют регулировку для локального тактового сигнала через адаптивные, непериодические интервалы, основанные на стабильности тактового генератора.
31. Способ по п.20, содержащий этапы, на которых:
обеспечивают тактовый сигнал из внешнего по отношению к блоку регистрации сейсмических данных источника;
вычисляют дрейф тактового сигнала, используя тактовый сигнал и локальный тактовый сигнал;
сдвигают рабочую частоту локального тактового сигнала на сдвиг частотной коррекции дрейфа;
регулируют локальный тактовый сигнал на основании вычисленного дрейфа тактового сигнала; и
удаляют сдвиг частотной коррекции дрейфа.
32. Способ обеспечения тактового сигнала с управляемой частотой для блока регистрации сейсмических данных, причем указанный способ содержит этапы, на которых:
a) обеспечивают устройство, использующее тактовый сигнал с регулируемой частотой, который изначально установлен на номинальную рабочую частоту;
b) обеспечивают тактовый сигнал в начале данного первого интервала времени;
c) сравнивают тактовый сигнал с регулируемой частотой с тактовым сигналом в начале первого интервала времени и определяют первую временную ошибку;
d) сравнивают тактовый сигнал с регулируемой частотой с тактовым сигналом в конце первого интервала времени и определяют вторую временную ошибку;
e) используют значения первой и второй временных ошибок, первого интервала времени и номинальной частоты для вычисления первой поправки частотной коррекции;
f) устанавливают второй интервал времени;
g) используют значения для второй временной ошибки, второго интервала времени и номинальной частоты для вычисления второй поправки частотной коррекции, достаточной для уменьшения временной ошибки до предварительно определенного значения в конце второго интервала времени;
h) применяют первую и вторую частотные поправки к стабильному тактовому сигналу в начале и вскоре после начала второго интервала времени; и
i) удаляют вторую частотную коррекцию из стабильного тактового сигнала в конце второго интервала времени.
33. Автономный блок регистрации сейсмических данных, содержащий:
a) закрытый, замкнутый корпус, имеющий стенку, задающую, по меньшей мере, одну внутреннюю камеру;
b) по меньшей мере, один сейсмограф, прочно закрепленный внутри указанного корпуса, причем указанный сейсмограф обладает, по меньшей мере, одним электрическим соединением, и причем все электрические соединения с указанным прочно закрепленным сейсмографом находятся внутри указанного корпуса;
c) дискретные часы, расположенные внутри указанного корпуса и выполненные с возможностью инициировать аналогово-цифровое преобразование данных от сейсмического датчика;
d) источник питания, расположенный в указанном корпусе;
e) устройство, записывающее сейсмические данные, расположенное в указанном корпусе;
f) управляющий процессор, размещенный в указанном корпусе и посредством которого реализован управляющий процесс для локального задания времени;
g) датчик окружающей среды, связанный с управляющим процессором и выполненный с возможностью предоставлять данные о локальном измеренном состоянии; и
h) регулируемое устройство тактового сигнала, выполненное с возможностью генерировать регулируемый тактовый сигнал для часов, причем указанное регулируемое устройство тактового сигнала сконфигурировано для корректировки управляющим процессором с использованием данных от датчика окружающей среды, при этом корректировка включает в себя регулировку частоты регулируемого устройства тактового сигнала;
i) причем корпус включает в себя первую пластину и вторую пластину, соединенные вместе указанной стенкой, задающей внутреннюю камеру.
j) беспроводной приемник, выполненный с возможностью связываться с управляющим процессором и переходить в режим низкого энергопотребления в случае неиспользования.
| US 2004257913 A1 23.12.2004 | |||
| US 2007189118 A1 18.06.2007 | |||
| US 20070188254 A1 16.08.2007 | |||
| БСЭ | |||
| Гл | |||
| ред | |||
| А М.Прохоров | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

