Изобретение относится к измерительной технике и может быть использовано для одновременного измерения расстояния до объектов, находящихся в поле обзора, их угловых координат и взаимного расположения.
Известен способ обнаружения объектов, измерения скорости, дальности и угловых координат, состоящий в излучении в направление зоны обзора импульса света, например, с помощью инфракрасных светодиодов и детектировании отраженных импульсов света, например, с помощью фоточувствительных элементов [1]. При излучении одного импульса света от объектов в зоне обзора, находящихся на разных угловых координатах и разных расстояниях, отражаются множество импульсов света, которые фокусируются и детектируются фоточувствительными элементами. Положение фоточувствительного элемента, на который поступает отраженный импульс света, определяет угловые координаты объекта в зоне обзора, от которого поступил сигнал, соответствующий детектированному импульсу света. Импульс света, в силу Эффекта Доплера, при отражении от движущегося объекта изменяет свою длительность - увеличивается, если объект удаляется, и уменьшается, если объект приближается, при этом изменяются несущая частота и частота модуляции сигнала. Изменение несущей частоты при отражении от движущегося объекта приводит к изменению длительности отраженного импульса света. Сигналы от отраженных импульсов света, детектированные на фоточувствительных элементах, оцифровывают. Недостатком этого способа является ограниченное поле обзора из-за узкой диаграммы направленности излучения.
Известны фасеточные оптико-электронные системы, поле обзора которых перекрывается множеством оптических каналов, состоящих из объектива и приемника излучения [2]. Такие системы обладают высоким быстродействием, но не обеспечивают измерение дальности до объекта.
Известен способ-прототип наземного лазерного сканирования, заключающийся в направлении лазерного импульсного излучения с малым углом расходимости на объекты, сканировании лазерным излучением поля обзора с помощью оптико-механической системы с одновременным измерением угловых координат направленного излучения, приеме (детектировании) отраженных импульсов, оцифровывании принятых сигналов, вычислении дальности до объекта по времени прихода импульсов для каждого углового направления и формировании облака точек, определяющих угловые координаты и дальность каждой отражающей площадки (точки) объекта. Способ реализуется в устройствах наземных лазерных сканеров [3]. Недостатком способа является низкое быстродействие в связи с оптико-механическим сканированием.
Целью заявляемого способа измерения расстояния до объектов, их угловых координат и взаимного расположения и устройства для его осуществления, является повышение быстродействия при формировании облака точек, определяющих угловые координаты и дальность каждой отражающей площадки объекта.
Поставленная цель достигается тем, что в способе измерения расстояния до объектов, их угловых координат и взаимного расположения, заключающемся в излучении импульсов излучения лазера в направлении поля обзора, детектировании отраженных импульсов, оцифровывании принятых сигналов, расчете дальностей до точек объектов в зоне обзора при одновременном измерении углового направления на эти точки и передаче результатов измерений и вычислений к внешним устройствам контроля объект поле обзора облучают во множестве направлений, перекрывающих в совокупности поле обзора и образующих матрицу смежных оптических каналов, при этом каждому оптическому каналу ставится в соответствие определенное угловое направление, а дальность до точки объекта вычисляется в оптических каналах поочередно в соответствии с заданной последовательностью.
Поставленная цель достигается тем, что в устройстве, реализующем способ измерения расстояния до объектов, их угловых координат и взаимного расположения, содержащем лазерный излучатель, приемную оптическую систему, приемник излучения, устройство управления излучением лазера, аналого-цифровой преобразователь, процессор, внешнее устройство контроля, лазерный излучатель выполнен в виде матрицы лазеров, оси излучения лазеров последовательно развернуты по азимуту в угловом поле Wα и высоте в угловом поле Wh на угол расходимости лазерного излучения θ, число элементов в матрице по азимуту равно nα=Wα/θ, по высоте nh=Wh/θ, а к устройству управления излучением лазера и процессора одновременно подключен генератор синхронизирующих импульсов.
Сущность предлагаемого изобретения поясняется чертежом, где обозначены: 1 - матрица лазеров, 2 - сечения пучков лазерного излучения в пространстве объектов, 3 - приемная оптическая система, 4 - приемник излучения, 5 - устройство управления излучением лазеров, 6 - генератор синхронизирующих импульсов, 7 - аналого-цифровой преобразователь.
Матрица лазеров представляет собой сборку полупроводниковых лазеров (лазерных диодов), работающих в импульсном режиме. Приемная оптическая система состоит из широкоугольного объектива, угловое поле которого охватывает поле обзора, и конденсора, переносящего поток излучения на приемник излучения. В качестве приемника излучения могут использоваться малоинерционные детекторы - ФЭУ или лавинные фотодиоды. Устройство управления излучением лазера включает типовые драйверы, обеспечивающие создание серий (пачек) из определенного числа импульсов лазерного излучения, генератор синхронизирующих импульсов создает начало отсчета времени при излучении лазерных импульсов и сигнал тактовой частоты, используемый для генерации импульсов излучения, синхронных с последовательностью подключения лазерных диодов.
Устройство работает следующим образом. С помощью устройства управления излучением лазеров создается режим излучения, при котором лазеры последовательно (строка за строкой матрицы) создают пачки импульсов короткой длительности. Каждая пачка импульсов посылается в определенном направлении в соответствии с шагом по азимуту (по строке) и по высоте (по кадру). Интервал между импульсами в пачке должен быть не меньше времени прохождения излучения до объекта и обратно. Отраженные от объекта лазерные импульсы принимаются оптической системой, преобразуются приемником излучения в электрический сигнал, который оцифровывается и поступает в процессор. Пачки импульсов разнесены во времени, за счет чего осуществляется их раздельный прием в каждом направлении излучения. По времени прихода каждого отраженного импульса в пачке (интервалу времени между излученным и принятым импульсами) в процессоре вычисляется дальность до объекта, результаты вычислений усредняются, и определяется дальность до объекта в заданном направлении, которое задается конкретным лазером (номером лазера в матрице). Для каждой точки сканирования, таким образом, определяются пространственные координаты (дальность, азимутальный и высотный углы), механическое сканирование при этом не осуществляется, но реализуется просмотр широкого поля обзора. Предлагаемое техническое решение может быть определено как «фасеточный лазерный сканер» в связи с совмещением фасеточного принципа построения оптической системы и принципа построения лазерного сканера.
Источники информации
1. Способ обнаружения объектов, измерения скорости, дальности и угловых координат и устройство для его осуществления (RU 2521203, авт. Бардин Антон Владимирович, Озеров Вениамин Петрович, Меткин Николай Павлович, Филонов Олег Михайлович, Киршина Ирина Анатольевна.
2. Устройство для обнаружения и измерения азимутального угла светоизлучающих импульсных объектов (патент РФ №2494343 от 10.04.2012, авт. Соломатин В.А.).
3. Середович В.А. Наземное лазерное сканирование: монография / В.А. Середович, А.В. Комиссаров, Д.В. Комиссаров, Т.А. Широкова. - Новосибирск: СГГА, 2009. - 261 с., стр. 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2580908C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ ОБЪЕКТОВ | 2004 |
|
RU2263931C1 |
| Способ адаптивного сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения маловысотного полета | 2016 |
|
RU2706912C2 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2006 |
|
RU2335785C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
Способ измерение расстояния до объектов, их угловых координат и взаимного расположения включает в себя облучение во множестве направлений, перекрывающих в совокупности поле обзора и образующих матрицу смежных оптических каналов, каждому оптическому каналу ставится в соответствие определенное угловое направление, а дальность до точки объекта вычисляется в оптических каналах поочередно в соответствии с заданной последовательностью. При этом в устройстве, которое реализует способ, оси излучения лазерных излучателей, формирующих матрицу лазеров, последовательно развернуты по азимуту и высоте на угол расходимости лазерного излучения. Технический результат заключается в увеличении быстродействия лазерных сканеров за счет исключения оптико-механического сканирования. 2 н.п. ф-лы, 1 ил.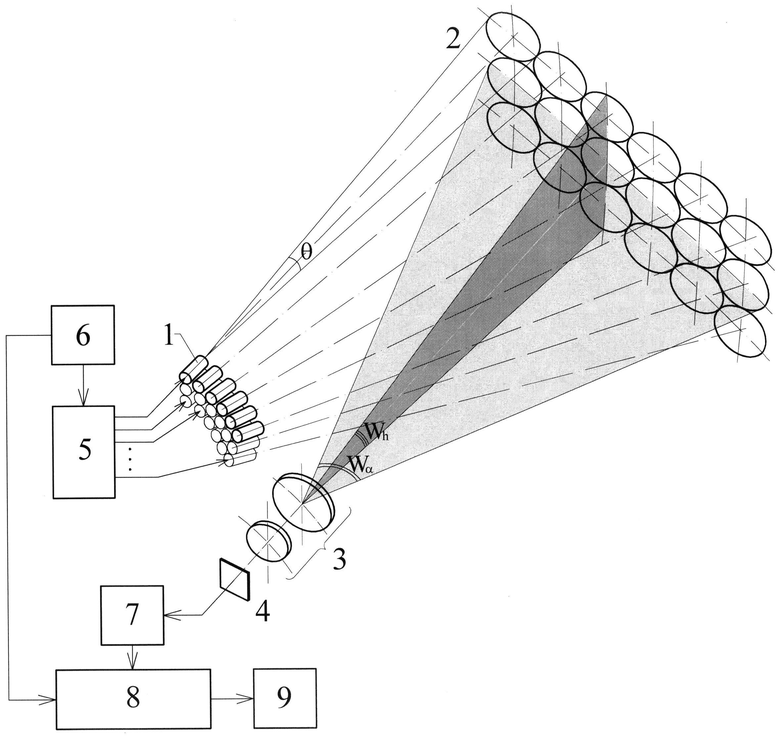
1. Способ измерения расстояния до объектов, их угловых координат и взаимного расположения, заключающийся в излучении импульсов излучения лазера в направлении поля обзора, детектировании отраженных импульсов, оцифровывании принятых сигналов, расчете дальностей до точек объектов в зоне обзора при одновременном измерении углового направления на эти точки и передаче результатов измерений и вычислений к внешним устройствам контроля, отличающийся тем, что объект в поле обзора облучают во множестве направлений, перекрывающих в совокупности поле обзора и образующих матрицу смежных оптических каналов, при этом каждому оптическому каналу ставится в соответствие определенное угловое направление, а дальность до точки объекта вычисляется в оптических каналах поочередно в соответствии с заданной последовательностью.
2. Устройство измерения расстояния до объектов, их угловых координат и взаимного расположения, содержащее лазерный излучатель, приемную оптическую систему, приемник излучения, устройство управления излучением лазера, аналого-цифровой преобразователь, процессор, внешнее устройство контроля, отличающееся тем, что лазерный излучатель выполнен в виде матрицы лазеров, оси излучения лазеров последовательно развернуты по азимуту в угловом поле Wα и высоте в угловом поле Wh на угол расходимости лазерного излучения θ, число элементов в матрице по азимуту равно nα=Wα/θ, по высоте nh=Wh/θ, а к устройству управления излучением лазера и процессору одновременно подключен генератор синхронизирующих импульсов.
| JPS 6480893 A 27.03.1989 | |||
| Устройство для предотвращения столкновения транспортного средства с препятствием | 1984 |
|
SU1209486A1 |
| US 6396577 B1 28.05.2002 | |||
| US 3953131 A1 27.04.1976 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, ИЗМЕРЕНИЯ СКОРОСТИ, ДАЛЬНОСТИ И УГЛОВЫХ КООРДИНАТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2521203C1 |

